基于LunarLander登陆器的TRPO强化学习(含PYTHON工程)
TRPO强化学习算法主要分为3个部分,分别介绍其理论、细节、实现
本文主要介绍TRPO的理论和代码的对应、实践
TRPO系列(TRPO是真的复杂,全部理解花费了我半个月的时间嘞,希望也能帮助大家理解一下):
11.1、信赖域策略优化算法TRPO强化学习-从理论到实践
11.2、信赖域策略优化算法TRPO强化学习-约束优化求解
11.3、信赖域策略优化算法TRPO强化学习-运用实践
其他算法:
07、基于LunarLander登陆器的DQN强化学习案例(含PYTHON工程)
08、基于LunarLander登陆器的DDQN强化学习(含PYTHON工程)
09、基于LunarLander登陆器的Dueling DQN强化学习(含PYTHON工程)
10、基于LunarLander登陆器的Dueling DDQN强化学习(含PYTHON工程)
11、基于LunarLander登陆器的A2C强化学习(含PYTHON工程)
参考:
【TRPO系列讲解】(五)TRPO_理论推导篇
目录
- 基于LunarLander登陆器的TRPO强化学习(含PYTHON工程)
- 1、替代优势函数的计算
- 2、替代优势函数导数的计算
- 3、海森向量积的计算
- 4、共轭梯度法求解 H − 1 g {{H^{ - 1}}g} H−1g
- 5、计算策略网络的更新步长
- 6、更新步长回溯衰减
- 7、基于LunarLander登陆器的TRPO强化学习(含PYTHON工程)
1、替代优势函数的计算
信赖域策略优化算法TRPO强化学习-从理论到实践中介绍了TRPO的核心函数:替代优势函数。
要优化的式子是:
max θ L θ o l d ( θ ) = max θ E s ∼ ρ θ o l d , a ∼ θ o l d [ π θ ( a ∣ s ) π θ o l d ( a ∣ s ) A θ o l d ( s , a ) ] s u b j e c t t o E s ∼ ρ θ o l d [ D K L ( π θ o l d ( ⋅ ∣ s ) ∥ π θ ( ⋅ ∣ s ) ) ] ≤ δ \begin{array}{l} {\max _\theta }{L_{{\theta _{old}}}}(\theta ) ={\max _\theta }E{_{s\sim{\rho _{{\theta _{old}}}},a\sim\theta_{old} }}\left[ {\frac{{{\pi _\theta }(a\mid s)}}{{{\pi _{{\theta _{old}}}}(a\mid s)}}{A_{{\theta _{old}}(s,a)}}} \right]\\ subject\;to\quad {E_{s\sim{\rho _{{\theta _{old}}}}}}\left[ {{D_{KL}}({\pi _{{\theta _{old}}}}( \cdot \mid s)\parallel {\pi _\theta }( \cdot \mid s))} \right] \le \delta \end{array} maxθLθold(θ)=maxθEs∼ρθold,a∼θold[πθold(a∣s)πθ(a∣s)Aθold(s,a)]subjecttoEs∼ρθold[DKL(πθold(⋅∣s)∥πθ(⋅∣s))]≤δ
替代优势函数 L θ o l d ( θ ) {L_{{\theta _{old}}}}(\theta ) Lθold(θ)的表达式为:
L θ o l d ( θ ) = E s ∼ ρ θ o l d , a ∼ θ o l d [ π θ ( a ∣ s ) π θ o l d ( a ∣ s ) A θ o l d ( s , a ) ] {L_{{\theta _{old}}}}(\theta ) =E{_{s\sim{\rho _{{\theta _{old}}}},a\sim\theta_{old} }}\left[ {\frac{{{\pi _\theta }(a\mid s)}}{{{\pi _{{\theta _{old}}}}(a\mid s)}}{A_{{\theta _{old}}(s,a)}}} \right] Lθold(θ)=Es∼ρθold,a∼θold[πθold(a∣s)πθ(a∣s)Aθold(s,a)]
其中:
A π ( s , a ) = Q π ( s , a ) − V π ( s ) A_\pi(s,a)=Q_\pi(s,a)-V_\pi(s) Aπ(s,a)=Qπ(s,a)−Vπ(s)
对应核心代码(考虑到熵实际上是额外的改进了):
# 计算新旧动作概率之比,即当前策略与旧策略在给定状态下的动作选择概率之比prob_ratio = action_prob / old_action_prob # pi(a|s) / pi_old(a|s)# 计算替代损失。这个损失主要由两部分组成:1) 基于新旧策略的动作概率之比的收益;2) entropy正则化项,由self.ent_coeff控制权重。loss = tf.reduce_mean(prob_ratio * advantage) + self.ent_coeff * entropy
状态价值函数V可以通过批评者网络得到,但是Q函数在TRPO中属于未知的,在此使用 U t U_t Ut近似,其原因如下:
Q(s,a)和Ut关系:Q(s,a)是Ut的期望,期望可以理解为求积分,实际上Q是对Ut把所有t之后的时刻(t+1、t+2等等)当作变量求积分得到的。因此Q(s,a)可以直观反应当前状态s下执行各个动作的好坏。
Q π ( s t , a t ) = E [ U t ∣ s t , a t ] Q_\pi(s_t,{a_t})=\mathbb{E}[U_t\mid s_t,{a_t}] Qπ(st,at)=E[Ut∣st,at]
由此替代优势函数的计算的代码表达如下(代码里面叫surrogate_loss,其实是一样的):
# 计算状态价值函数
Vs = self.value_model(obs).numpy().flatten()
# 计算优势函数,Gs就是Ut
advantage = Gs - Vs
# 直接标准化
advantage = (advantage - advantage.mean())/(advantage.std() + 1e-8)
actions_one_hot = tf.one_hot(actions, self.envs[0].action_space.n, dtype="float64")
# 计算其替代函数L的损失
policy_loss = surrogate_loss()
def surrogate_loss(theta=None):# 如果theta为None,则使用self.model作为模型,否则使用self.tmp_model并为其赋值if theta is None:model = self.modelelse:model = self.tmp_modelassign_vars(self.tmp_model, theta)# 使用模型对obs进行预测,得到logitslogits = model(obs)# 对logits应用softmax函数,得到action的概率分布action_prob = tf.nn.softmax(logits)# 计算每个动作的概率之和,这里假设actions_one_hot是动作的one-hot编码action_prob = tf.reduce_sum(actions_one_hot * action_prob, axis=1)# 使用原始模型对obs进行预测,得到旧的logitsold_logits = self.model(obs)# 对旧的logits应用softmax函数,得到旧的动作概率分布old_action_prob = tf.nn.softmax(old_logits)# 计算每个动作的旧概率之和,并加上一个小的常数以避免除以0的错误old_action_prob = tf.reduce_sum(actions_one_hot * old_action_prob, axis=1).numpy() + 1e-8# 计算新旧动作概率之比,即当前策略与旧策略在给定状态下的动作选择概率之比prob_ratio = action_prob / old_action_prob # pi(a|s) / pi_old(a|s)# 计算替代损失。这个损失主要由两部分组成:1) 基于新旧策略的动作概率之比的收益;2) entropy正则化项,由self.ent_coeff控制权重。loss = tf.reduce_mean(prob_ratio * advantage) + self.ent_coeff * entropy# 返回计算得到的损失值。return loss
2、替代优势函数导数的计算
信赖域策略优化算法TRPO强化学习-约束优化求解的第2部分中,替代优势函数的导数在更新中扮演着十分重要的作用,需要进行求解:
g T = ∇ θ L θ o l d ( θ ) ∣ θ = θ o l d {g^T} = {\nabla _\theta }{L_{{\theta _{old}}}}(\theta ){|_{\theta = {\theta _{old}}}} gT=∇θLθold(θ)∣θ=θold
θ ′ = 2 δ g T H − 1 g H − 1 g + θ \theta^{\prime}=\sqrt{\frac{2\delta}{g^{T}H^{-1}g}}H^{-1}g+\theta θ′=gTH−1g2δH−1g+θ
其对应的代码为:
# 计算替代优势函数的导数g
policy_gradient = flatgrad(surrogate_loss, self.model.trainable_variables).numpy()
其中,flatgrad是求导的函数,在代码中会多次用到:
# Makes gradient of function loss_fn wrt var_list and
# flattens it to have a 1-D vector 计算梯度,并将其扁平化
def flatgrad(loss_fn, var_list):with tf.GradientTape() as t:loss = loss_fn()grads = t.gradient(loss, var_list, unconnected_gradients=tf.UnconnectedGradients.ZERO)return tf.concat([tf.reshape(g, [-1]) for g in grads], axis=0)3、海森向量积的计算
对于TRPO的不等式约束,我们对其使用二阶泰勒展开(证明参考自然梯度Natural Policy):
D K L ρ o l d ‾ ( π o l d , π n e w ) → 1 2 ( θ − θ o l d ) T A ( θ o l d ) ( θ − θ o l d ) H = A ( θ o l d ) = ∇ θ 2 D K L ρ o l d ‾ ( π o l d , π n e w ) \begin{aligned}\overline{D_{KL}^{\rho_{old}}}(\pi_{old},\pi_{new})\to\frac12(\theta-\theta_{old})^TA(\theta_{old})(\theta-\theta_{old})\\\\H=A(\theta_{old})=\nabla_\theta^2\overline{D_{KL}^{\rho_{old}}}(\pi_{old},\pi_{new})\end{aligned} DKLρold(πold,πnew)→21(θ−θold)TA(θold)(θ−θold)H=A(θold)=∇θ2DKLρold(πold,πnew)
此外,我们需要使用共轭梯度法求解 H − 1 g {{H^{ - 1}}g} H−1g矩阵,这等价于求解线性方程 H x = g Hx=g Hx=g,需要频繁使用到海森矩阵H和向量x的乘积。而且,海森矩阵需要对KL散度求二阶导得到,这是一个相对复杂的过程。【TRPO系列讲解】(六)TRPO_求解实现篇的第12min介绍了一种简单的运算加速方式,就是先对KL散度求一阶导数,然后乘以向量x,然后再对相乘后的式子求导:
H i j = ∂ ∂ θ j ∂ D K L ∂ θ i y i = ∂ ∂ θ ∑ j ∂ D K L ∂ θ j x j y k = ∑ j H k j x j = ∑ j ∂ ∂ θ j ∂ D K L ∂ θ k x j = ∂ ∂ θ k ∑ j ∂ D K L ∂ θ j x j \begin{aligned} &H_{ij}=\frac{\partial}{\partial\theta_{j}}\frac{\partial D_{KL}}{\partial\theta_{i}} \\ &y_{i}=\frac{\partial}{\partial\theta}\sum_{j}\frac{\partial D_{KL}}{\partial\theta_{j}}x_{j} \\ &y_{k}=\sum_{j}H_{kj}x_{j} =\sum_{j}\frac{\partial}{\partial\theta_{j}}\frac{\partial D_{KL}}{\partial\theta_{k}}x_{j} \\ &=\frac{\partial}{\partial\theta_{k}}\sum_{j}\frac{\partial D_{KL}}{\partial\theta_{j}}x_{j} \end{aligned} Hij=∂θj∂∂θi∂DKLyi=∂θ∂j∑∂θj∂DKLxjyk=j∑Hkjxj=j∑∂θj∂∂θk∂DKLxj=∂θk∂j∑∂θj∂DKLxj
对应代码如下:
# 计算Hessian向量积
def hessian_vector_product(p):# 此处的p实际输入的是xdef hvp_fn():# 使用flatgrad函数计算kl_fn损失函数关于模型可训练变量的梯度,得到一个扁平化的梯度数组kl_grad_vectorkl_grad_vector = flatgrad(kl_fn, self.model.trainable_variables)# 计算梯度向量与给定向量p的点积,并将结果存储在grad_vector_product中grad_vector_product = tf.reduce_sum(kl_grad_vector * p)# 返回grad_vector_product的值return grad_vector_product# 使用flatgrad函数计算hvp_fn内部函数关于模型可训练变量的梯度,得到一个扁平化的梯度数组fisher_vector_productfisher_vector_product = flatgrad(hvp_fn, self.model.trainable_variables).numpy()# 返回fisher_vector_product的值,并加上cg_damping与向量p的乘积?return fisher_vector_product + (self.cg_damping * p)
4、共轭梯度法求解 H − 1 g {{H^{ - 1}}g} H−1g
信赖域策略优化算法TRPO强化学习-约束优化求解的第4部分提到了,我们需要使用共轭梯度法求解 H − 1 g {{H^{ - 1}}g} H−1g矩阵,这等价于求解线性方程 H x = g Hx=g Hx=g,需要频繁使用到海森矩阵H和向量x的乘积,这实际上是残差的计算。
其中policy_gradient 是对替代优势函数的导数,也就是g。hessian_vector_product函数作为conjugate_grad函数的第一个输入Ax,之后再调用Ax§计算海森矩阵和向量p的乘积。(至始至终都没有单独计算过海森矩阵的值,都是计算的海森矩阵和向量的乘积)
对共轭梯度法不了解的参考我的另一个博客:最速下降法、梯度下降法、共轭梯度法—理论分析与实践
代码中step_direction 其实就是要计算的 H − 1 g {{H^{ - 1}}g} H−1g矩阵。
# 计算替代优势函数的导数g
policy_gradient = flatgrad(surrogate_loss, self.model.trainable_variables).numpy()
# 使用共轭梯度法
step_direction = conjugate_grad(hessian_vector_product, policy_gradient)
# 共轭梯度法def conjugate_grad(Ax, b):"""Conjugate gradient algorithm(see https://en.wikipedia.org/wiki/Conjugate_gradient_method)"""x = np.zeros_like(b)r = b.copy() # Note: should be 'b - Ax(x)', but for x=0, Ax(x)=0. Change if doing warm start.p = r.copy()old_p = p.copy()r_dot_old = np.dot(r,r)for _ in range(self.cg_iters):z = Ax(p)alpha = r_dot_old / (np.dot(p, z) + 1e-8)old_x = xx += alpha * pr -= alpha * zr_dot_new = np.dot(r,r)beta = r_dot_new / (r_dot_old + 1e-8)r_dot_old = r_dot_newif r_dot_old < self.residual_tol:breakold_p = p.copy()p = r + beta * pif np.isnan(x).any():print("x is nan")print("z", np.isnan(z))print("old_x", np.isnan(old_x))print("kl_fn", np.isnan(kl_fn()))return x
5、计算策略网络的更新步长
信赖域策略优化算法TRPO强化学习-约束优化求解的第3部分提到了,在TRPO算法中,其更新公式为:
θ ′ = 2 δ g T H − 1 g H − 1 g + θ \theta^{\prime}=\sqrt{\frac{2\delta}{g^{T}H^{-1}g}}H^{-1}g+\theta θ′=gTH−1g2δH−1g+θ
H − 1 g {{H^{ - 1}}g} H−1g的数值我们可以通过共轭梯度法进行求解,那我们该如何计算更新的参数呢?
# 计算替代优势函数的导数g
policy_gradient = flatgrad(surrogate_loss, self.model.trainable_variables).numpy()
# 使用共轭梯度法,step_direction 是H-1*g
step_direction = conjugate_grad(hessian_vector_product, policy_gradient)
# 中间变量,计算的是
shs = .5 * step_direction.dot(hessian_vector_product(step_direction).T)lm = np.sqrt(shs / self.delta) + 1e-8
fullstep = step_direction / lm
根据如上的代码:
s h s = ( 1 2 H − 1 g ) ( H H − 1 g ) T = 1 2 g T H − 1 g l m = g T H − 1 g 2 δ f u l l s t e p = H − 1 g g T H − 1 g 2 δ = 2 δ g T H − 1 g H − 1 g \begin{array}{l} shs = \left( {\frac{1}{2}{H^{ - 1}}g} \right){\left( {H{H^{ - 1}}g} \right)^T} = \frac{1}{2}{g^T}{H^{ - 1}}g\\ lm = \sqrt {\frac{{{g^T}{H^{ - 1}}g}}{{2\delta }}} \\ fullstep = \frac{{{H^{ - 1}}g}}{{\sqrt {\frac{{{g^T}{H^{ - 1}}g}}{{2\delta }}} }} = \sqrt {\frac{{2\delta }}{{{g^T}{H^{ - 1}}g}}} {H^{ - 1}}g \end{array} shs=(21H−1g)(HH−1g)T=21gTH−1glm=2δgTH−1gfullstep=2δgTH−1gH−1g=gTH−1g2δH−1g
和更新数据一致。
6、更新步长回溯衰减
但是,信赖域策略优化算法TRPO强化学习-约束优化求解的第5部分提到了,TRPO使用了太多的近似,理论的方程并不一定是最好的,那我们我们该如何做呢?我们可以选择小于 α \alpha α的学习率多次尝试(如 0. 9 1 α 0.9^1\alpha 0.91α、 0. 9 2 α 0.9^2\alpha 0.92α、 0. 9 3 α 0.9^3\alpha 0.93α、 0. 9 4 α 0.9^4\alpha 0.94α…),直到找到一个能够提升替代优势 L θ o l d ( θ ) {L_{{\theta _{old}}}}(\theta ) Lθold(θ)的学习率,这个过程被称为LineSearch:
# 在给定方向上找到函数的局部最小值,最优化算法def linesearch(x, fullstep):# fval = surrogate_loss(x)for (_n_backtracks, stepfrac) in enumerate(self.backtrack_coeff**np.arange(self.backtrack_iters)):xnew = x + stepfrac * fullstepnewfval = surrogate_loss(xnew)kl_div = kl_fn(xnew)if np.isnan(kl_div):print("kl is nan")print("xnew", np.isnan(xnew))print("x", np.isnan(x))print("stepfrac", np.isnan(stepfrac))print("fullstep", np.isnan(fullstep))if kl_div <= self.delta and newfval >= 0:print("Linesearch worked at ", _n_backtracks)return xnewif _n_backtracks == self.backtrack_iters - 1:print("Linesearch failed.", kl_div, newfval)return x7、基于LunarLander登陆器的TRPO强化学习(含PYTHON工程)
基于TensorFlow 2.10
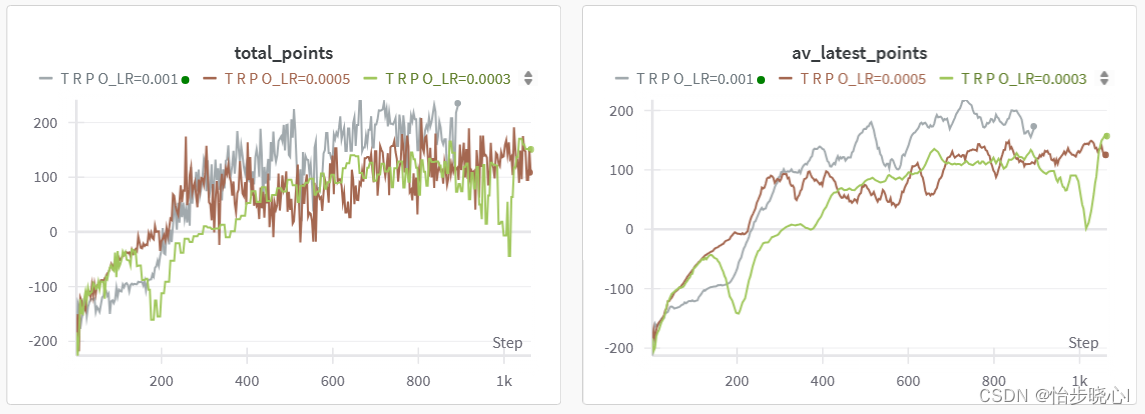
主要代码来自github上的一位小哥,但是原来的效果太差了:
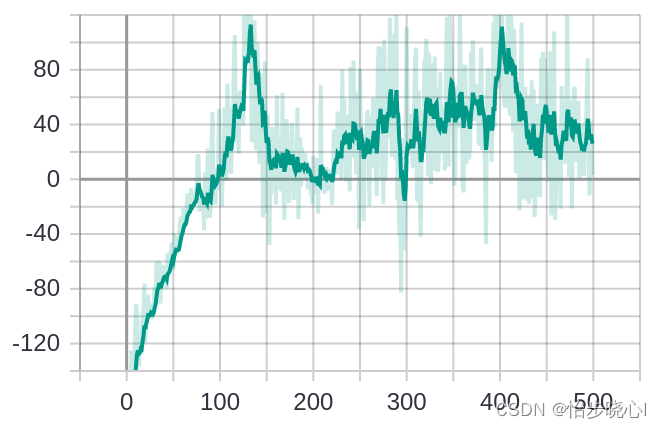
我稍微修改优化了一下,下面的两张图第一个是每次运行的得分,第二张为均值平滑后的曲线,因为使用了wandb,实际上运行了大约300个episode,作者原来的因该是运行500个episode的结果嘞(LR是价值网络的学习率,因为使用了自然梯度法,策略网络的学习率无需手动设置)。优化后基本能跑个200多分,算是还可以吧。
工程可以从最上方链接下载,喜欢就点个赞吧。