上一篇博客写了关于Handsfree_ros_imu:ROS机器人IMU模块ARHS姿态传感器(A9)Liunx系统Ubuntu20.04学习启动和运行教程:
https://blog.csdn.net/qq_54900679/article/details/135539176?spm=1001.2014.3001.5502
这次带来get_imu_rpy.py文件的学习与数据记录改进:
get_imu_rpy.py文件位置如下:
对应的代码如下:
#!/usr/bin/env python
#coding=UTF-8import rospy
import tf
from tf.transformations import *
from sensor_msgs.msg import Imudef callback(data):#这个函数是tf中的,可以将四元数转成欧拉角(r,p,y) = tf.transformations.euler_from_quaternion((data.orientation.x,data.orientation.y,data.orientation.z,data.orientation.w))#由于是弧度制,下面将其改成角度制看起来更方便rospy.loginfo("Roll = %f, Pitch = %f, Yaw = %f",r*180/3.1415926,p*180/3.1415926,y*180/3.1415926)def get_imu():rospy.init_node('get_imu', anonymous=True)rospy.Subscriber("/handsfree/imu", Imu, callback) #接受topic名称rospy.spin()if __name__ == '__main__':get_imu()
这段Python代码是一个ROS节点的代码示例,用于订阅名为/handsfree/imu的ROS话题(topic),该话题发布了传感器的IMU(惯性测量单元)数据。
以下是代码的主要功能和结构解释:
-
导入必要的Python库和ROS消息类型:
rospy:ROS Python库,用于编写ROS节点。tf:ROS中的变换库,用于进行坐标变换。from tf.transformations import *:导入tf库中的变换函数。from sensor_msgs.msg import Imu:导入ROS消息类型Imu,用于订阅IMU数据。
-
callback函数:callback函数是一个回调函数,它会在接收到/handsfree/imu话题的新消息时被调用。- 在回调函数内部,通过
tf.transformations.euler_from_quaternion函数将四元数转换为欧拉角(Roll、Pitch、Yaw)。 - 使用
rospy.loginfo函数将欧拉角以角度制格式打印到ROS日志中。
-
get_imu函数:get_imu函数是主函数,用于初始化ROS节点并设置话题订阅。rospy.init_node用于初始化ROS节点,其中'get_imu'是节点的名称,anonymous=True表示使节点名称唯一。rospy.Subscriber用于订阅/handsfree/imu话题,当有新消息发布到该话题时,将调用callback函数进行处理。rospy.spin()使节点保持运行状态,等待新消息的到来。
-
if __name__ == '__main__'::- 这是Python的条件语句,用于检查脚本是否被直接运行而不是被导入到其他脚本中。
- 如果脚本被直接运行,则调用
get_imu()函数启动ROS节点并开始订阅IMU数据。
总的来说,这个脚本是一个ROS节点,用于订阅IMU数据并将其转换为欧拉角形式,然后将结果打印到ROS日志中。这对于在ROS中处理IMU数据非常有用。
该文件在linux终端运行的代码和结果如下:
rosrun handsfree_ros_imu get_imu_rpy.py

改进部分
光在终端输出数据还不够,如果想要将其输出的这些rpy数据实时地保存成文本文件或者csv格式的文件,需要对原始代码进行改进,改进后的代码(imu_data_record.py)如下:
import rospy
import tf
from tf.transformations import *
from sensor_msgs.msg import Imu
import time# 定义记录开始和结束时间
start_time = time.time() # 记录开始时间
record_duration = 6 # 设置记录持续时间,这里设置为6秒,您可以根据需要进行调整
end_time = start_time + record_duration # 记录结束时间# 打开文件以写入数据
file_path = '/home/hjx/handsfree/imu_data_record/rpy_timer/imu_data_rpy_timer.txt' # txt文件路径
file_path = '/home/hjx/handsfree/imu_data_record/rpy_timer/imu_data_rpy_timer.csv' # csv文件路径
file = open(file_path, 'w')def callback(data):if time.time() < end_time: # 在规定的时间段内执行记录(r, p, y) = tf.transformations.euler_from_quaternion((data.orientation.x, data.orientation.y, data.orientation.z, data.orientation.w))# 由于是弧度制,下面将其改成角度制看起来更方便imu_data = "Roll = %f, Pitch = %f, Yaw = %f" % (r * 180 / 3.1415926, p * 180 / 3.1415926, y * 180 / 3.1415926)rospy.loginfo(imu_data)# 将数据写入文件file.write(imu_data + '\n')else:file.close() # 规定时间结束后关闭文件rospy.signal_shutdown("Recording completed.") # 停止ROS节点def get_imu():rospy.init_node('get_imu', anonymous=True)rospy.Subscriber("/handsfree/imu", Imu, callback) # 接受topic名称rospy.spin()if __name__ == '__main__':get_imu()
修改后的get_imu_rpy.py文件名称更名为imu_data_record.py
要在规定的时间段内停止数据的文本记录,您可以使用Python的time模块来实现。首先,您需要在get_imu函数中添加记录数据到文本文件的逻辑,并且在规定的时间段内记录数据,然后在时间结束后停止记录。
在上面的代码中,我们添加了一个计时器,以确保在规定的时间段内执行记录操作。当时间超过规定时间时,我们关闭文件并停止ROS节点。请注意,record_duration变量定义了记录的持续时间,您可以根据需要进行调整。
自定义imu_data_record文件的路径为(根据自己的喜好):

下面我在pycharm编辑器中来运行imu_data_record.py这个文件:
配置好conda的环境和ros包的路径后,开始运行:

代码运行的结果如下(在6秒钟之后代码运行结束);

"WARNING: cannot load logging configuration file, logging is disabled" 这个警告通常不会导致程序出现实际错误,但它表明程序尝试加载日志配置文件时遇到了问题,因此无法进行日志记录。这通常是由于找不到或无法读取日志配置文件而引起的。
如果您的程序不依赖于日志记录,或者您不关心程序的日志输出,那么这个警告可以忽略。然而,如果您希望记录程序的日志,您可能需要检查以下事项:
-
日志配置文件路径:确保日志配置文件的路径在程序中是正确的,并且文件存在。
-
文件权限:检查日志配置文件是否具有读取权限。
-
配置文件格式:确保日志配置文件的格式是正确的。ROS通常使用YAML格式的配置文件来配置日志记录。
-
ROS参数:有时,您可以通过设置ROS参数来指定日志配置文件的路径,确保这些参数设置正确。
虽然这个警告不会影响程序的正常运行,但如果您希望记录日志或解决警告,您可以尝试检查以上事项,并确保日志配置文件正确配置和可访问。如果问题仍然存在,您可以查看ROS社区或相关论坛上是否有关于此问题的更多信息和解决方案。
我们继续来到数据保存的路径下查看文件:

发现rpy_timer文件夹下多出来了一个imu_data_rpy_timer.txt文件,点开查看;

这些正是imu_data_record.py文件在6秒内生产的数据文本。
下面我想将这个些数据保存为csv格式,只要将py文件的保存文件扩展名变为.csv即可
继续运行imu_data_record.py文件,得到:


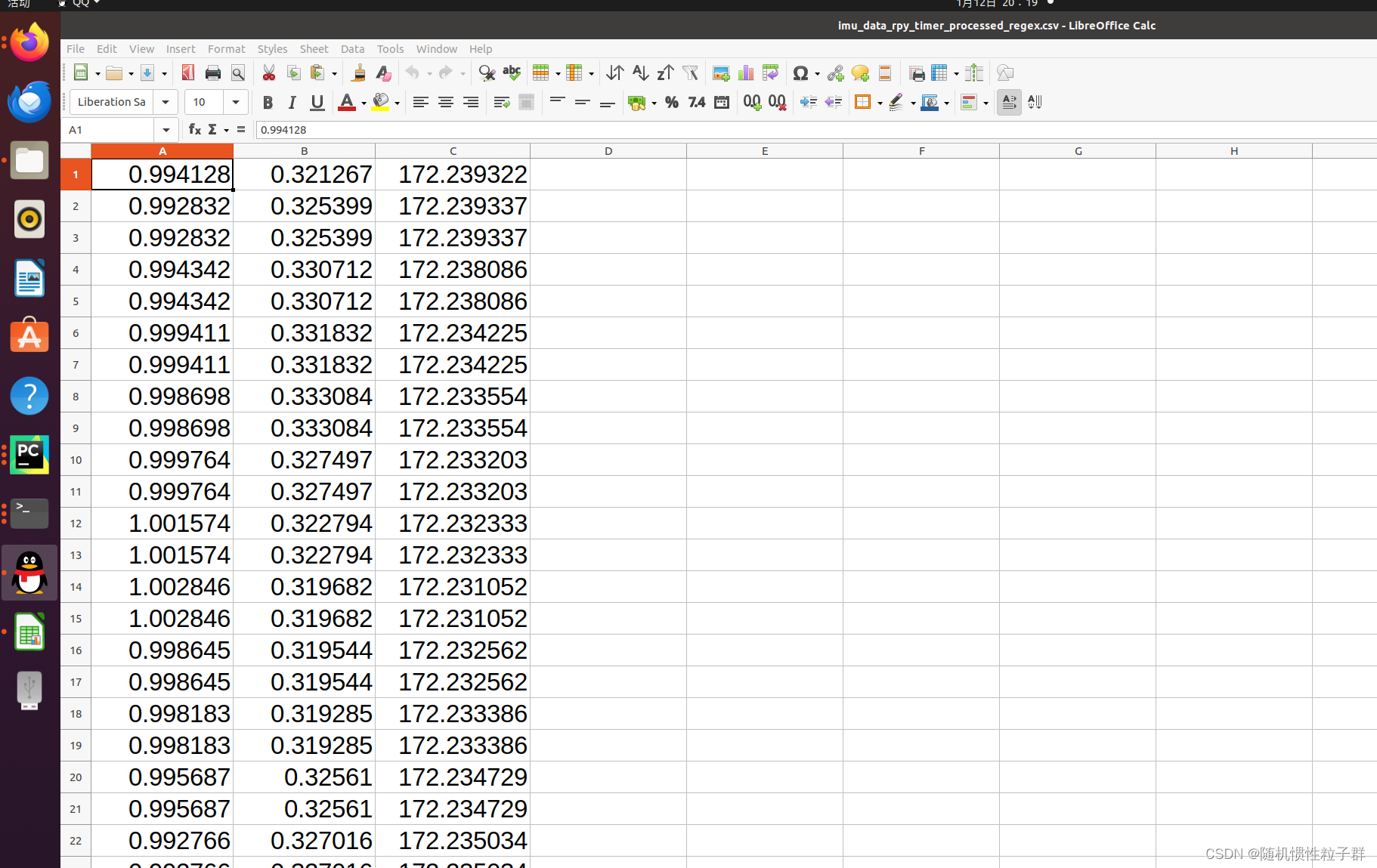
以上的CSV格式数据还可以进一步处理,使得数据看起来更加简洁:
依靠如下代码:
# data_processor_regex
import re# 定义一个函数,使用正则表达式来提取每行中的数字
def extract_numbers(line):# 正则表达式匹配所有的浮点数和负数return re.findall(r"[-+]?\d*\.\d+|\d+", line)# 读取原始数据文件
with open('/home/hjx/handsfree/imu_data_record/rpy_timer/imu_data_rpy_timer.csv', 'r') as file:original_lines = file.readlines()# 创建一个新的CSV文件用于保存处理后的数据
with open('/home/hjx/handsfree/imu_data_record/rpy_timer/imu_data_rpy_timer_processed_regex.csv', 'w') as output_file:for line in original_lines:numbers = extract_numbers(line)if len(numbers) >= 3:# 提取 Roll, Pitch, Yaw 的值roll, pitch, yaw = numbers[:3]# 写入提取的值到新的CSV文件output_file.write(f'{roll},{pitch},{yaw}\n')print('数据处理完成,已保存为 imu_data_rpy_timer_processed_regex.csv 文件')# 这段代码首先定义了一个函数 extract_numbers 来使用正则表达式从字符串中提取数字。
# 然后,它读取原始数据文件,对于文件中的每一行,使用这个函数来提取数字,
# 最后将提取的 Roll、Pitch 和 Yaw 值写入到一个新的CSV文件中。
可实现下面的最终效果: