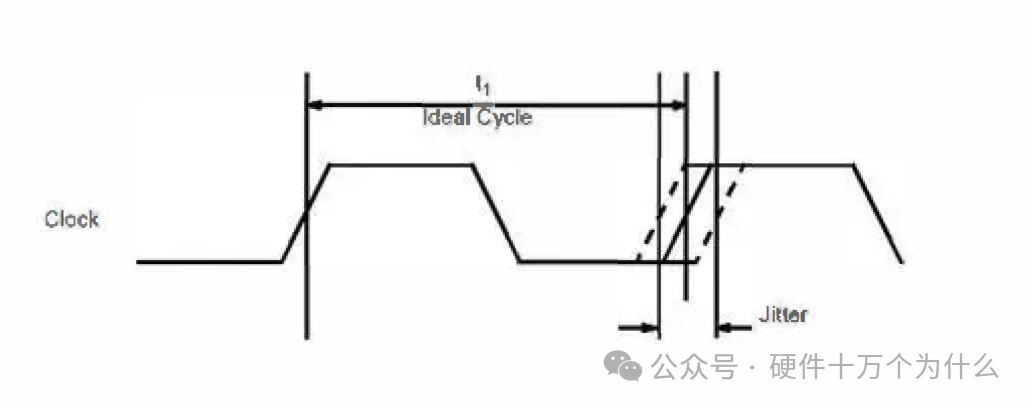
抖动(Jitter)和相噪(Phase Noise)都是与信号时钟或波形稳定性相关的概念,它们在通信系统和电子设备中都有重要作用。
抖动(Jitter)反映的是数字信号偏离其理想位置的时间偏差,是一个时域上的概念。
高频数字信号的bit周期都非常短,—般在几百ps甚至几十ps, 很小的抖动都会造成信号采样位置电平的变化,所以高频数字信号对于抖动都有严格的要求。
抖动是对信号时域变化的测量结果,它从本质上描述了信号周期距离其理想值偏离了多少。包括确定性抖动和随机抖动。实际信号的很复杂,可能既有随机抖动成分(RJ), 也有不同频率的确定性抖动成分(DJ)。
确定性抖动是由可识别的干扰信号造成的,这种抖动通常幅度有限,具备特定的产生原因,而且不能进行统计分析。
确定性抖动的来源主要有4种:
1、相邻信号走线之间的串扰
2、敏感信号通路上的EMI辐射
3、多层基底中电源层的噪声
4、多个门电路同时转换为同一种逻辑状态
随机抖动是指由较难预测的因素导致的时序变化。随机抖动最基本的一个特性就是随机性,因此我们可以用高斯统计分布来描述其特性。
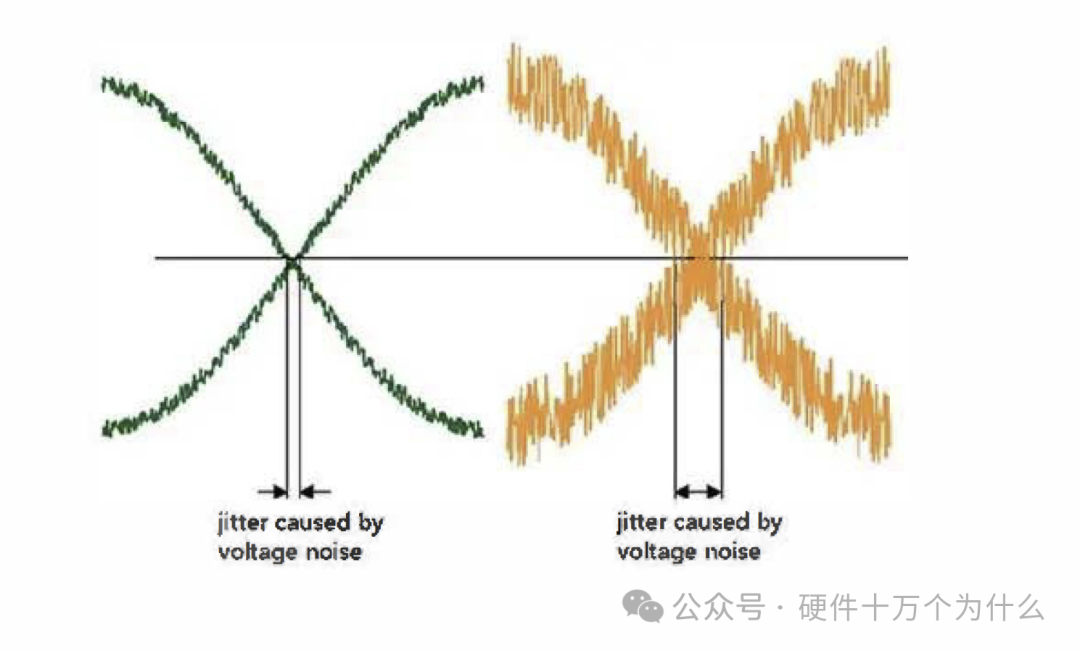
确定性抖动可能由于码间干扰或一些周期性干扰引起,而随机抖动很大一部分来源于信号上的噪声。下图反映的是一个带噪声的数字信号及其判决阈值。一般我们把数字信号超过阈值的状态 判决为'1", 把低于阈值的状态判决为"0",由于信号的上升沿不是无限陡的,所以垂直的幅度噪声就会造成信号过阈值点时刻的左右变化,这就是由于噪声造成信号抖动的原因。
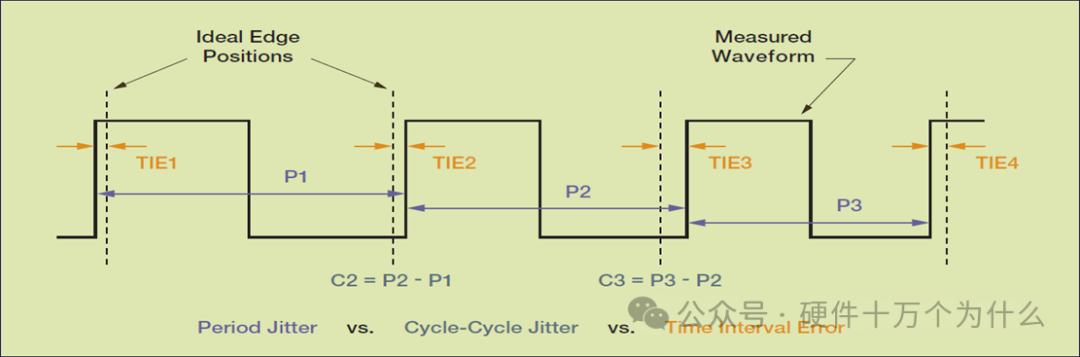
描述时钟系统的抖动参量一般分为三类,
相位抖动(Phase jitter)--时钟边沿相位相对标准相位的抖动
周期抖动(Period jitter)--如下图
相邻周期间抖动(Cycle to cycle jitter) --如下图
很多需要进行时钟恢复的异步系统中,常常需要靠时钟边沿来保证时序关系,完成正确的采样,因此时钟边沿的抖动(相位抖动)就是一个非常好的衡量时钟好坏的指标;
但是许多同步系统不会直接使用时钟的边沿来保证时序关系,而是看周期的稳定性,也就是周期的抖动,有时候时钟周期越长,可能带来保持时间余量不足的问题,这个时候就需要测量周期抖动;
而相邻周期间抖动常常可以用来衡量时钟分频器的稳定性。总之,这三种抖动都是衡量时钟本身性能的指标,在不同的应用背景下需要关注不同的指标,通常时钟芯片的手册会给出对时钟的抖动指标要求。
相位噪声(phase noise)是对信号时序变化的另一种测量方式,是一个频域上的概念,其结果在频率域内显示。图2用一个振荡器信号来解释相位噪声。

要进行信号抖动的分析,最常用的工具是宽带示波器配合上响应的抖动分析软件。示波器里的抖动分析软件可以方便地对抖动的大小和各种成分进行分解,但是示波器由于噪声和测量方法的限制,很难对亚ps级的抖动进行精确测量。现在很多高速芯片对时钟的抖动要求都在1ps以下甚至更低。这就需要借助于其它的测量方法比如相位噪声(phase noise)的测量方法。
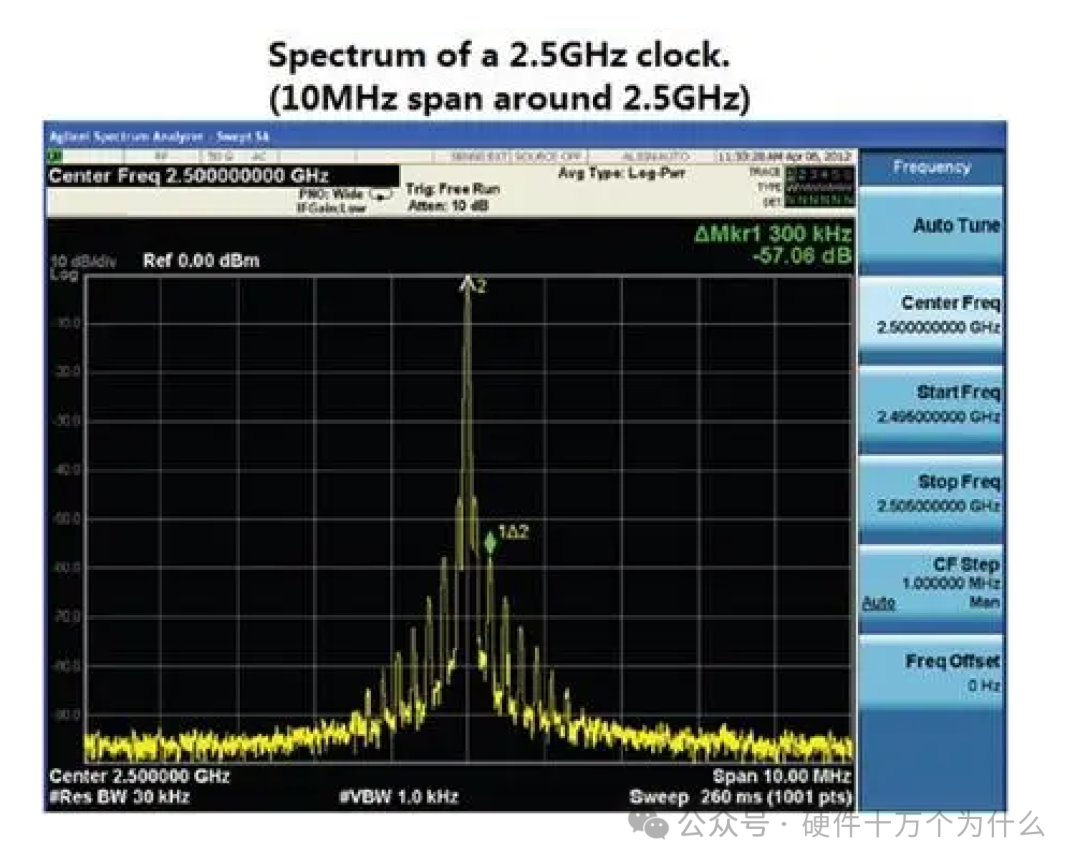
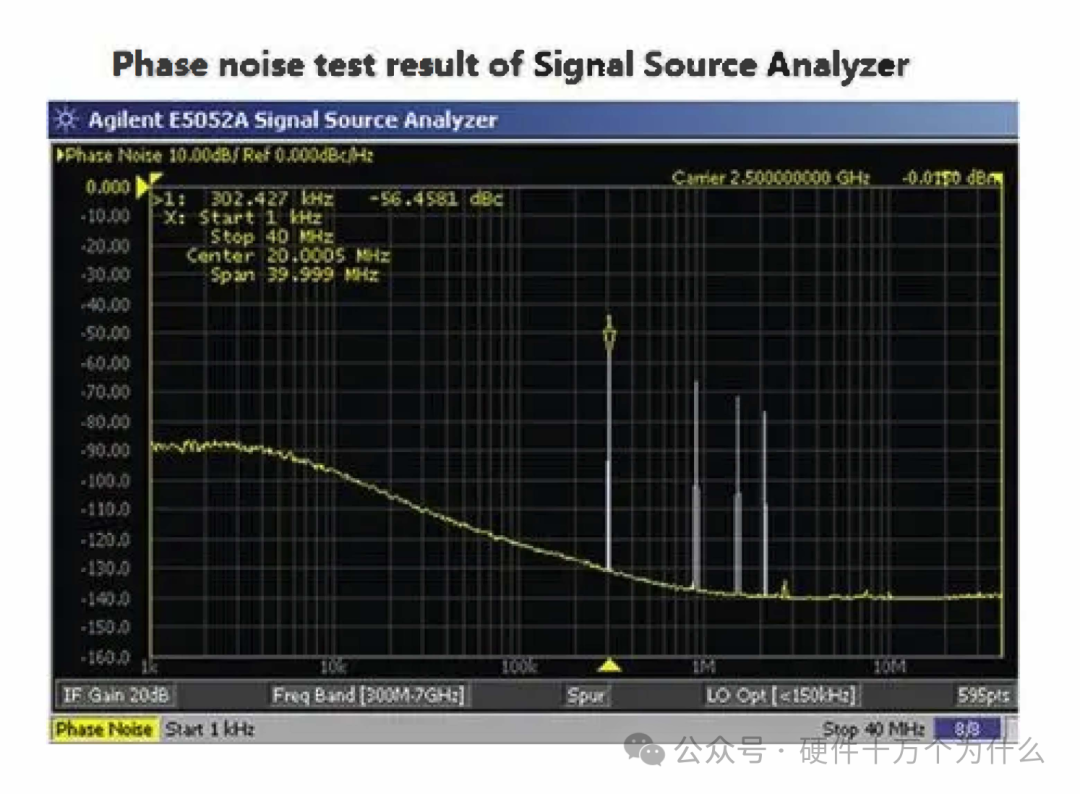
我们知道抖动是时间上的偏差,它也可以理解成时钟相位的变化,这就是相位噪声。对于时钟信号,我们观察其基波的频谱分布。理想的时钟信号其基波的频谱应该是一根很窄的谱线,但实际上由于相位噪声的存在,其谱线是比较宽的一个包络,这个包络越窄,说明相位噪声(抖动)越小,信号越接近理想信号。下图是一个真实时钟信号的频谱,信号的基波在2.5GHz,我们观察2.5GHz附近10MHz带宽的频谱。我们可以看到首先信号的频谱不是一根很窄的谱线其谱线有展宽(随机噪声的影响),其次上面叠加的还有一些特定频率的干扰(确定性抖动的影响)。
为了更方便观察低频的干扰,在相位噪声测中通常会以信号的载波频率为起点,把横坐标用对数显示,其横坐标反映的是离信号载波频的远近,纵坐标反映的是相应频点的能量和信号载波能量的比值。这个比值越小,说明除了波以外其它频率成分的能量越小,信号越纯净。
要进行时钟信号的相位噪声精确测量使用的器是信号源分析仪,信号源分析内部有特殊的电路,通过两个独立本振的多次相关处理可以把自身本振的相位噪声压得非常低。从而可以进行精确的相位噪声测量。
对于很多晶振产生的时钟来说,其抖动中的主要成分是随机抖动。如果我们把相位噪声测试结果里不同频率成分的相位噪声能量进行积分的话,我们就能够得到随机抖动。通过信号源分析仪对相位噪声测量然后对—定带宽内的能量进行积分,我们就可以得到精确的随机抖动测量结果。信号源分析仪能测量到的最小抖动可以到fs级。
-
抖动(Jitter):
-
抖动是指时钟或信号的周期性或随机性的时间偏移。在数字通信中,抖动可能导致数据传输时的时序误差,影响系统性能。
-
抖动通常由于时钟源的不稳定性、噪声、干扰或其他因素引起。它可以分为周期性抖动和随机抖动。
-
-
相噪(Phase Noise):
-
相噪是指信号的相位随时间的变化,通常以频谱形式表示。它表示信号的相位在频率上的波动,是信号频谱中不同频率分量的相对相位变化。
-
相噪主要由于时钟源内部的非理想性、振荡器的噪声和其他因素引起。在无线通信系统和射频电路中,相噪可能导致接收端的性能下降,特别是对于窄带调制信号。
-
关系:
-
抖动和相噪都涉及到信号的时间稳定性,都可能影响系统的性能。
-
在某些情况下,抖动可以通过傅里叶变换表示为频域中的相位噪声,因此抖动和相噪之间存在一定的关联。
-
时钟源的稳定性和精度直接影响到抖动和相噪的水平,因此在设计和选择时钟源时需要考虑这些因素。
抖动和相噪是在不同领域描述的类似现象,都是与信号的稳定性和精度有关的重要概念。在设计和优化电子系统时,工程师需要综合考虑这两个因素,以确保系统的性能和稳定性。
抖动(Jitter)和相噪(Phase Noise)之间存在一定的数学关系,它们可以通过傅里叶变换相互转化。这种关系涉及到频域和时域的转换,以下是一些基本的概念:
1、从抖动到相噪的转化:
2、从相噪到抖动的转化:
-
-
抖动的时域表现可以通过信号的时间偏移来描述。对于一个具有周期性抖动的信号,可以通过将其时域表示进行傅里叶变换,得到频域上的频谱。
-
在频域中,抖动的频谱表现为相位噪声。相位噪声的大小和频率分布与抖动的性质有关。一般来说,频谱中的高频成分对应于较快的时间变化,而低频成分对应于较慢的变化。
-
相噪是频域上描述信号相位随时间变化的现象。通过对相噪的频谱进行逆傅里叶变换,可以得到时域上的抖动。
-
这意味着,相噪的频谱表示了不同频率分量上的相位变化,而通过逆变换,可以将这些频率分量的影响还原为时域上的时间偏移。
-
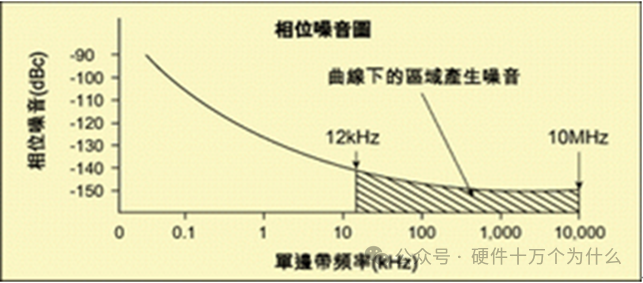
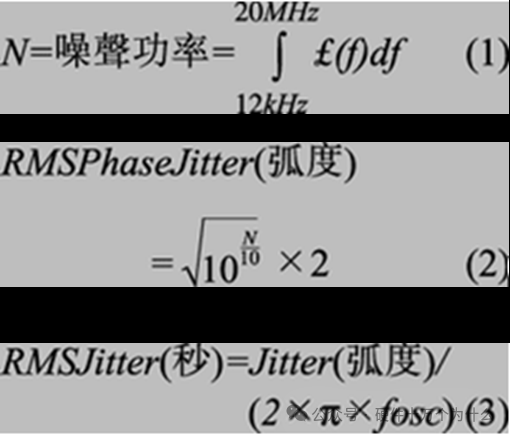
右下图绘出的是从12 kHz到 10 MHz这个频带范围内,某振荡器的相位噪声情况。图中,L(f)以功率谱密度函数的形式给出了边带噪声的分布,单位为dBc。中心频率的功率并不重要,因为抖动只反映了相位噪声(即调制)与“纯”中心频率处的相对功率值。边带的总噪声功率可以由L(f)函数在整个感兴趣频段内(在本例中,即12 KHz到 10 MHz频段内)积分得到。
计算得到的是相位调制噪声在该频段内的功率,而相位调制正是造成抖动的原因。由此,我们还能用如下的定积分推出RMS抖动的值。





![[python语言]数据类型](https://img-blog.csdnimg.cn/direct/e0e0e176ffc14cc2a79712aa5d667eea.png)