Multi ElasticSearch Head插件安装好之后我们可以进行一些基本的操作。
1、复合查询
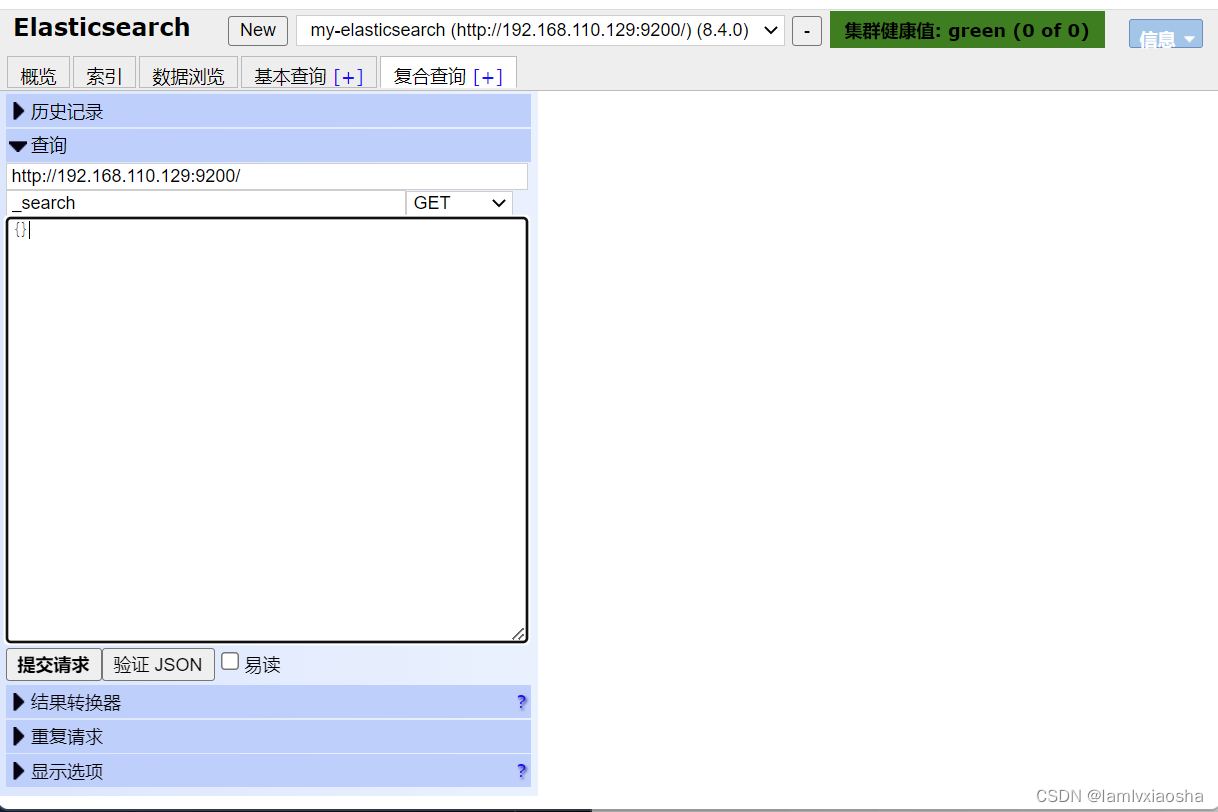
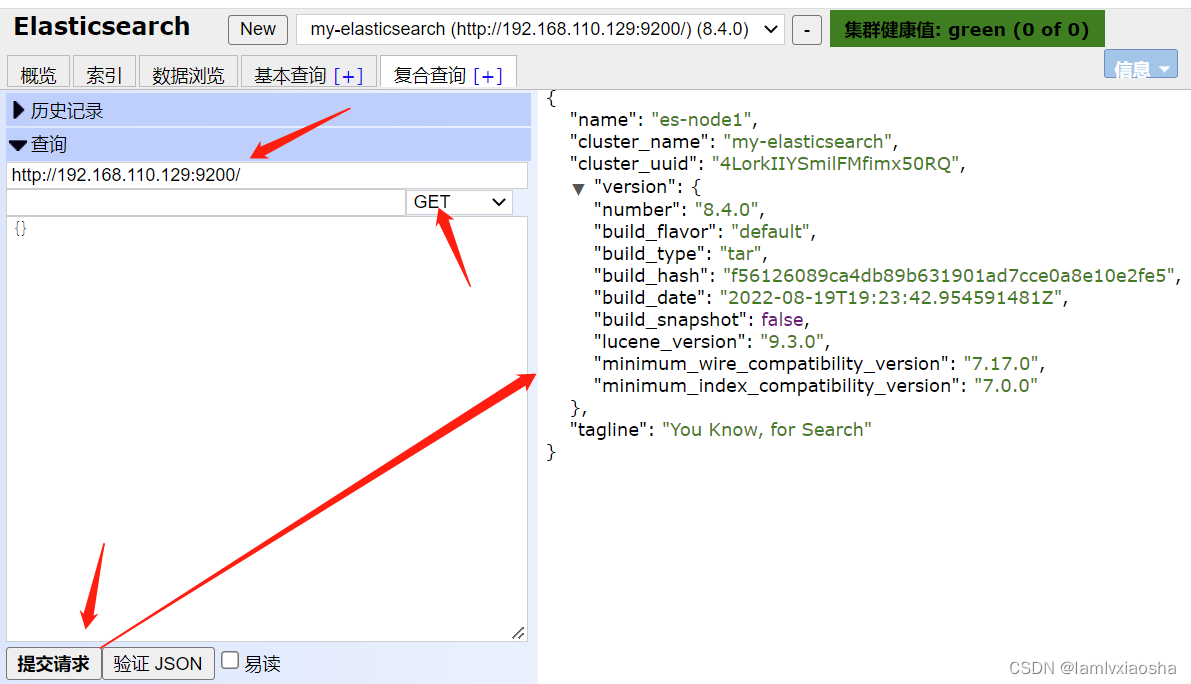
因为ES提供了一些Restful风格的接口,可以让任何语言去调用,因此我们可以将之前的请求地址粘贴到Multi ElasticSearch Head插件里面,选择GET请求方式,最后点击提交请求。
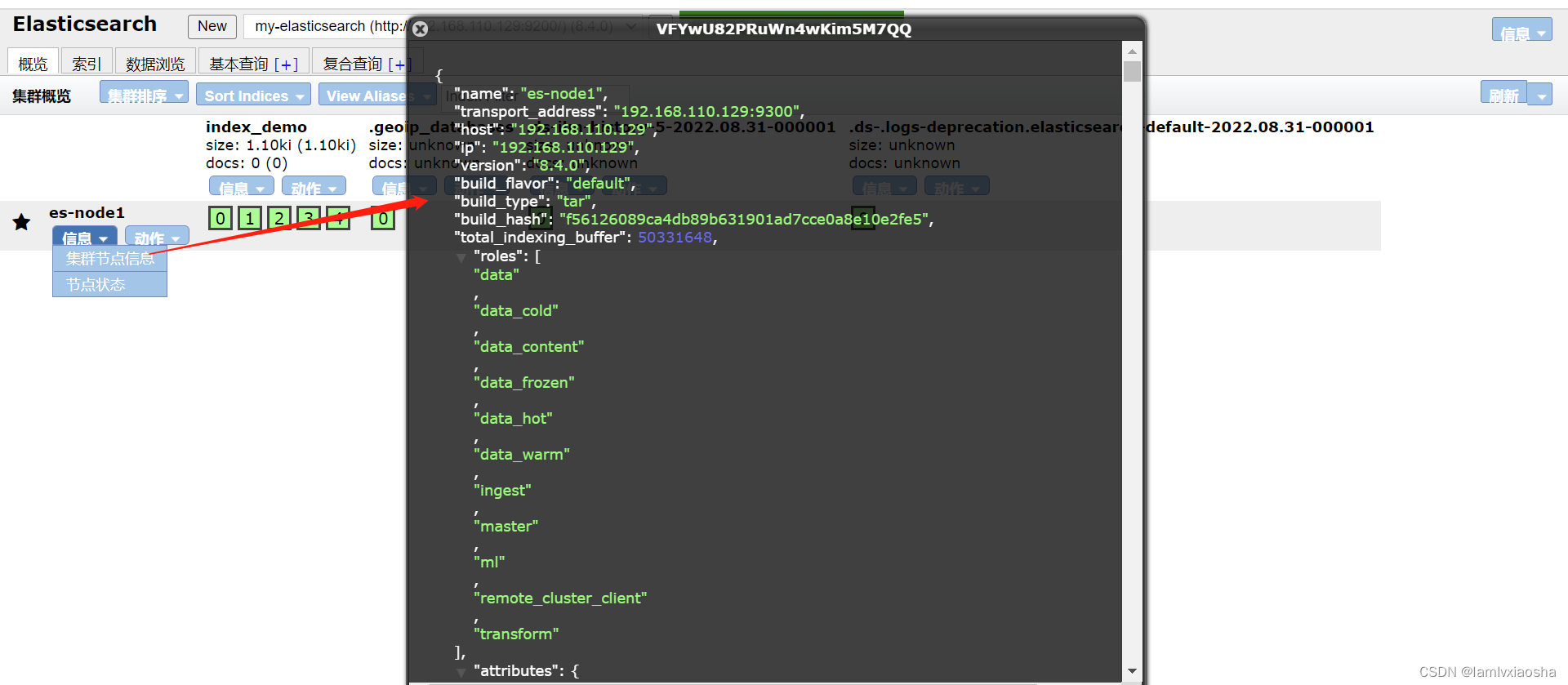
点击索引的信息 集群节点信息 可以查看ES的集群信息。

2、索引创建
方式一:通过Multi ElasticSearch Head插件来创建索引
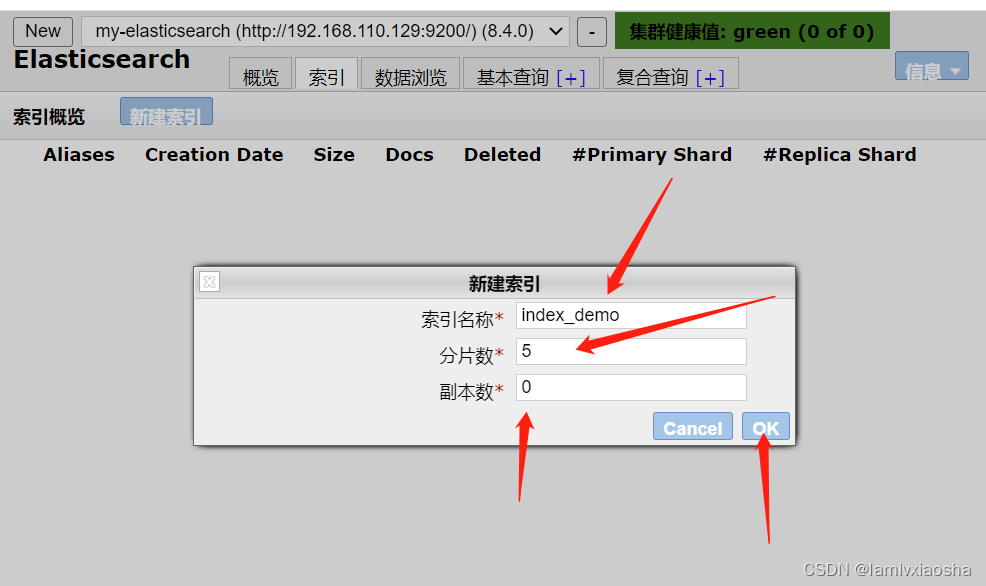
点击 索引->新建索引

在弹窗里面输入索引名称,并选择分片数和副本数。点击OK。
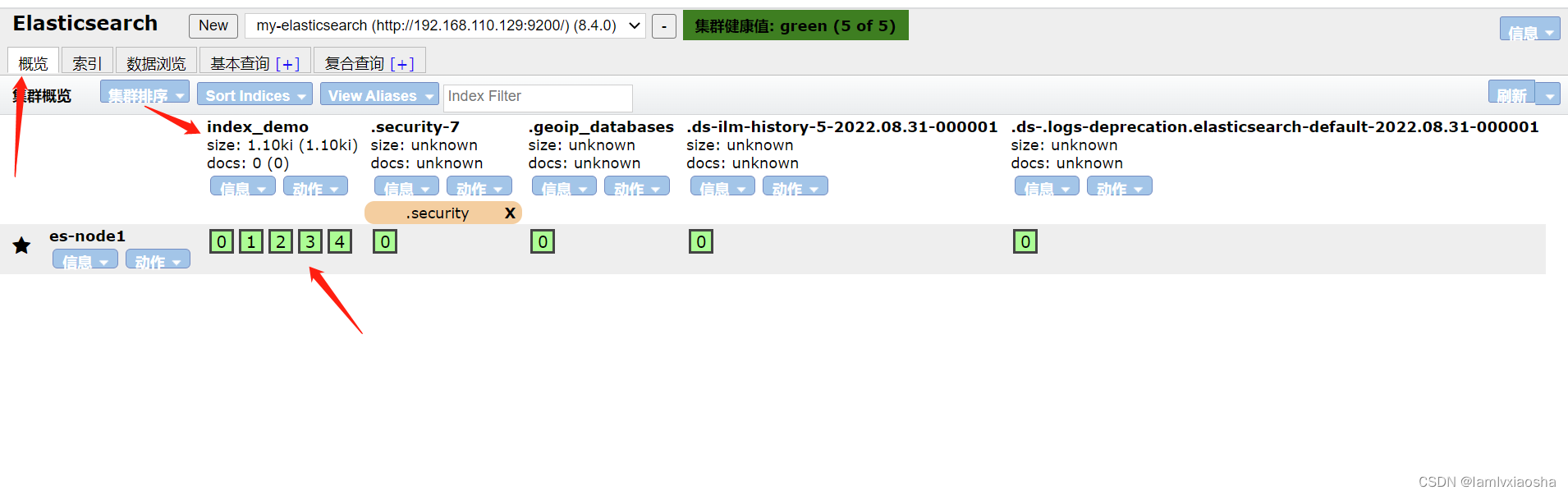
索引创建成功之后,在概览里面可以看到我们刚才创建的index_demo索引,因为分片数是5,所以它有0,1,2,3,4, 这5个shards分片。它没有备份的replicas副本。上面绿色的集群健康值: green (5 of 5)是什么意思呢?它是显示整个集群的状态的。正常情况下是绿色,另外还有黄色和红色。
以下是部分的说明,详细请见官网:集群健康 | Elasticsearch: 权威指南 | Elastic
green
所有的主分片和副本分片都已分配。你的集群是 100% 可用的。
yellow
所有的主分片已经分片了,但至少还有一个副本是缺失的。不会有数据丢失,所以搜索结果依然是完整的。不过,你的高可用性在某种程度上被弱化。如果 更多的 分片消失,你就会丢数据了。把 yellow 想象成一个需要及时调查的警告。
red
至少一个主分片(以及它的全部副本)都在缺失中。这意味着你在缺少数据:搜索只能返回部分数据,而分配到这个分片上的写入请求会返回一个异常。
green/yellow/red 状态是一个概览你的集群并了解眼下正在发生什么的好办法。剩下来的指标给你列出来集群的状态概要:
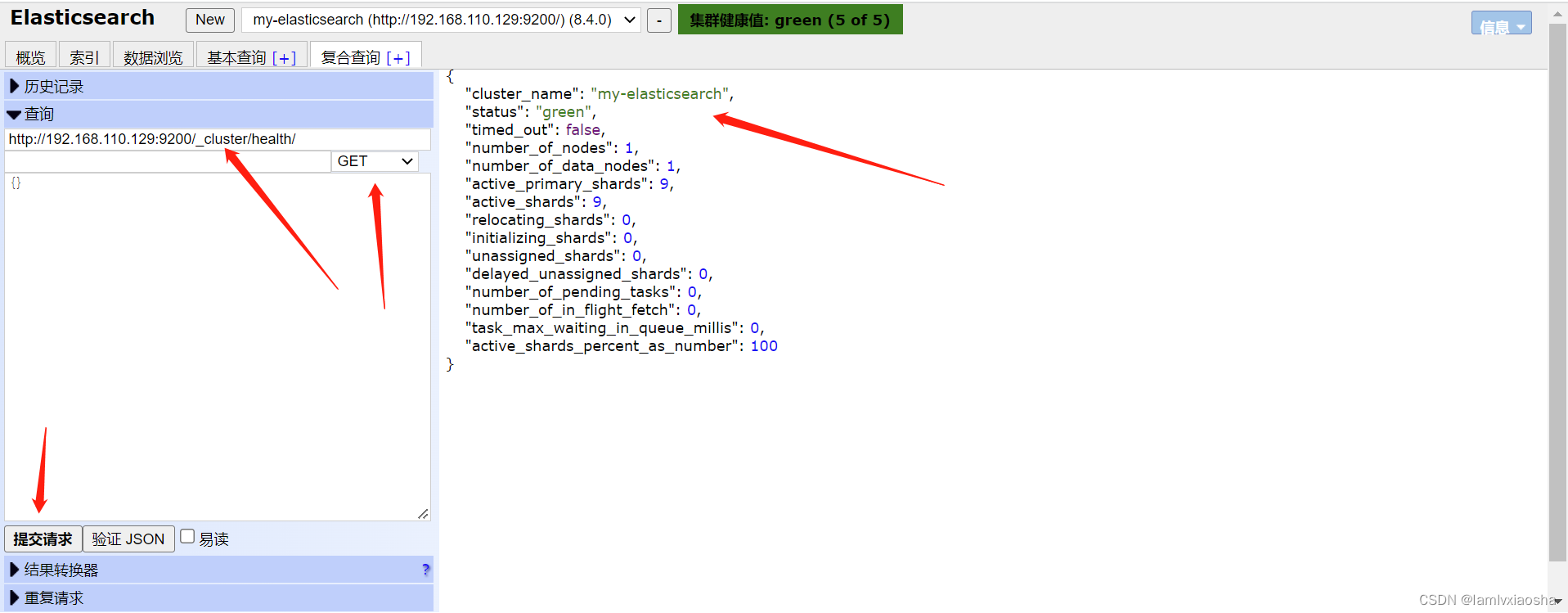
number_of_nodes和number_of_data_nodes这个命名完全是自描述的。active_primary_shards指出你集群中的主分片数量。这是涵盖了所有索引的汇总值。active_shards是涵盖了所有索引的_所有_分片的汇总值,即包括副本分片。relocating_shards显示当前正在从一个节点迁往其他节点的分片的数量。通常来说应该是 0,不过在 Elasticsearch 发现集群不太均衡时,该值会上涨。比如说:添加了一个新节点,或者下线了一个节点。initializing_shards是刚刚创建的分片的个数。比如,当你刚创建第一个索引,分片都会短暂的处于initializing状态。这通常会是一个临时事件,分片不应该长期停留在initializing状态。你还可能在节点刚重启的时候看到initializing分片:当分片从磁盘上加载后,它们会从initializing状态开始。unassigned_shards是已经在集群状态中存在的分片,但是实际在集群里又找不着。通常未分配分片的来源是未分配的副本。比如,一个有 5 分片和 1 副本的索引,在单节点集群上,就会有 5 个未分配副本分片。如果你的集群是red状态,也会长期保有未分配分片(因为缺少主分片)。
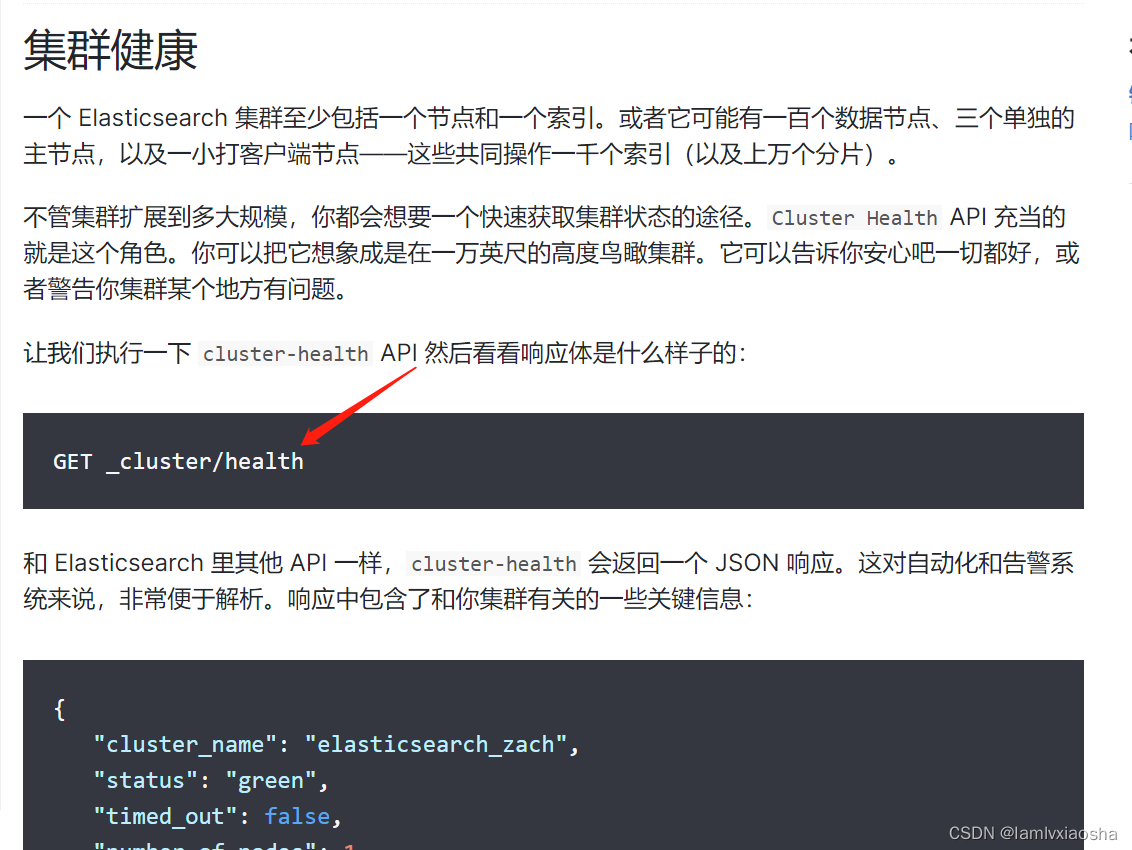
我们可以使用ES提供的集群健康检查API查看集群的状态
GET _cluster/health
使用方式如下:
方式二:通过ES提供的Restful的API接口创建索引
PUT /index_test
{
"settings": {
"index": {
"number_of_shards": "2",
"number_of_replicas": "0"
}
}
}
3、索引删除
方式一:通过Multi ElasticSearch Head插件来删除
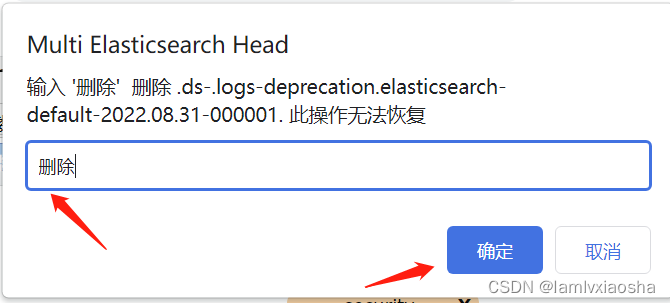
点击 概览,然后找到想要删除的索引,然后点击 动作 下拉框,选择 删除 。
在弹出的弹框里面输入"删除"两个字之后点击确定。

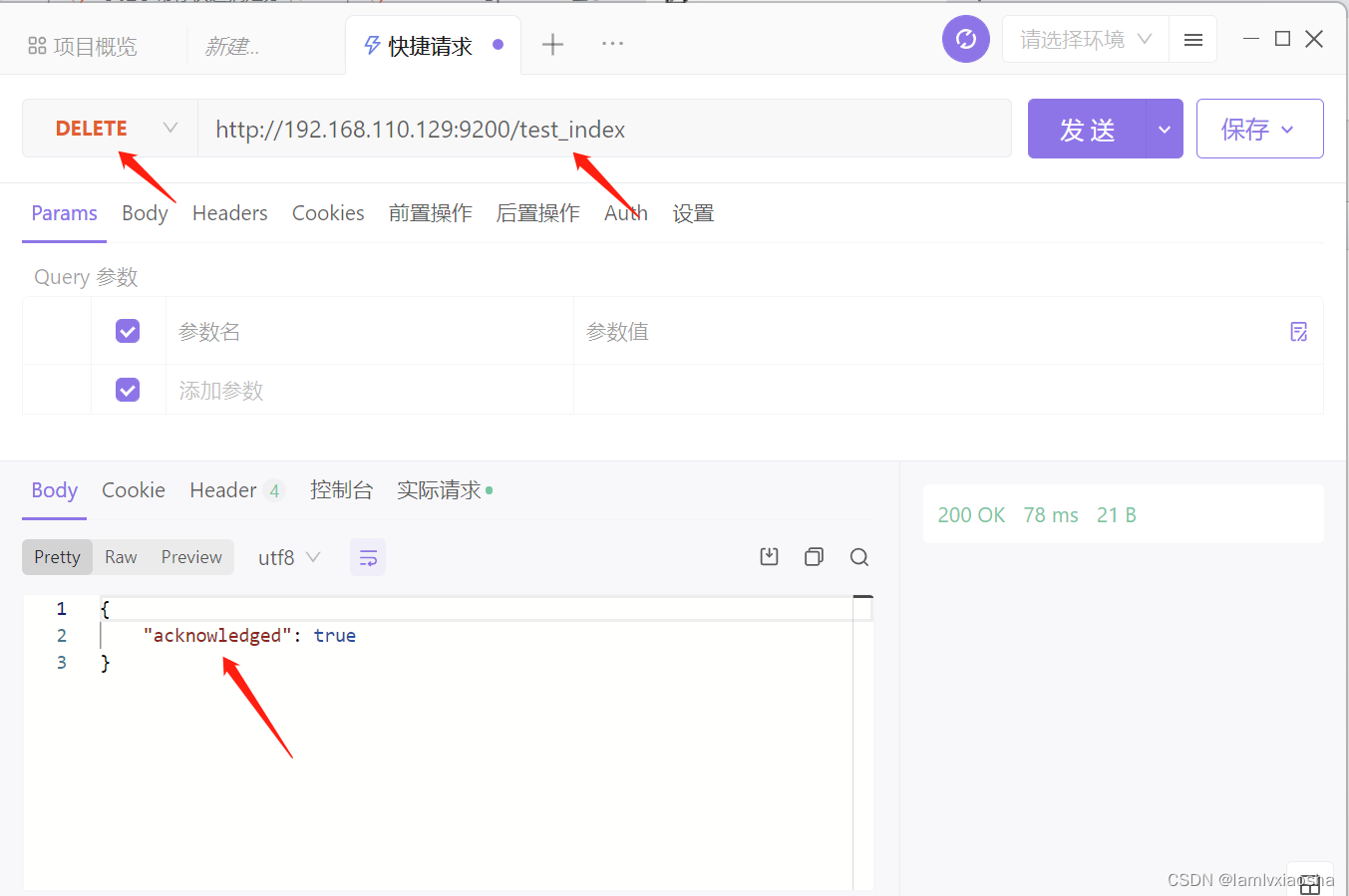
方式一:通过ES提供的Restful的API接口删除索引。
请求方式选择DELETE,要删除的索引名称放在http://ES所在ip:port/的后面

本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.hqwc.cn/news/444210.html
如若内容造成侵权/违法违规/事实不符,请联系编程知识网进行投诉反馈email:809451989@qq.com,一经查实,立即删除!相关文章
备战蓝桥杯---数据结构与STL应用(优先队列的小细节)
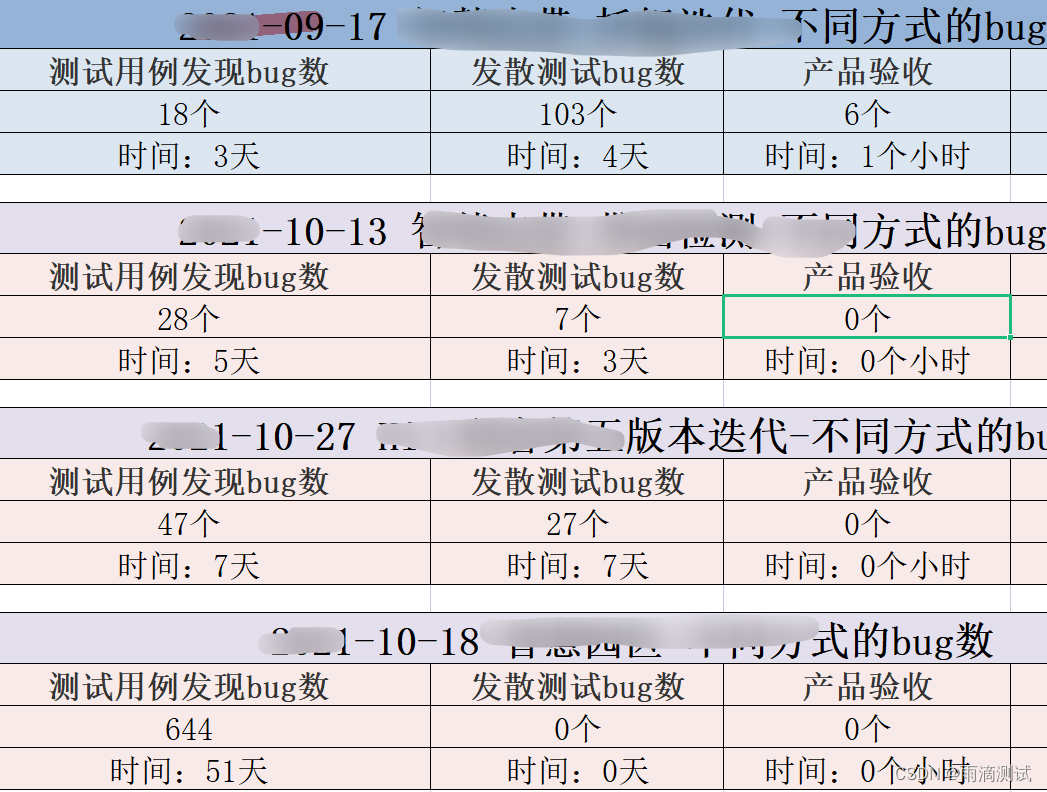
做好测试用例的分析 ? 是做好软件测试的必要步骤。
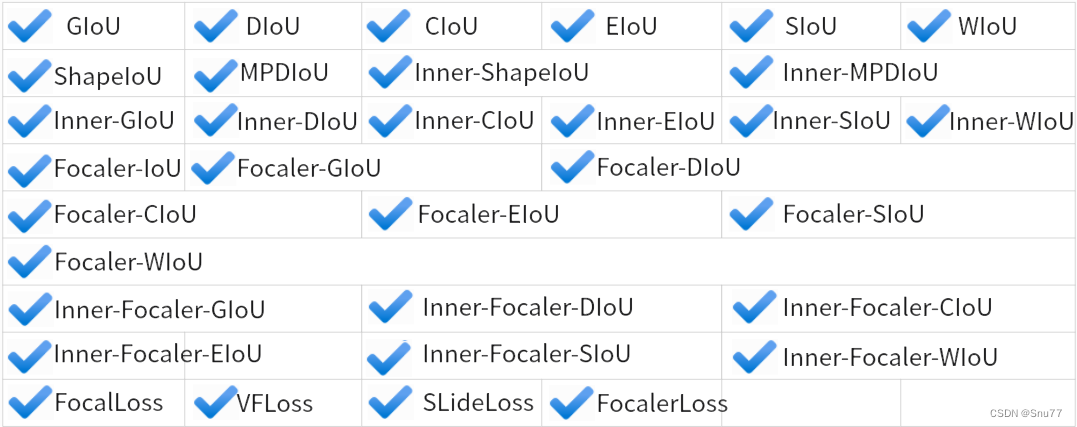
YOLOv8改进 | 损失函数篇 | 更加聚焦的边界框损失Focaler-IoU、InnerFocalerIoU(二次创新)

Windows系统中的命令行

2024热门游泳耳机排行榜,精选四款游泳耳机品牌
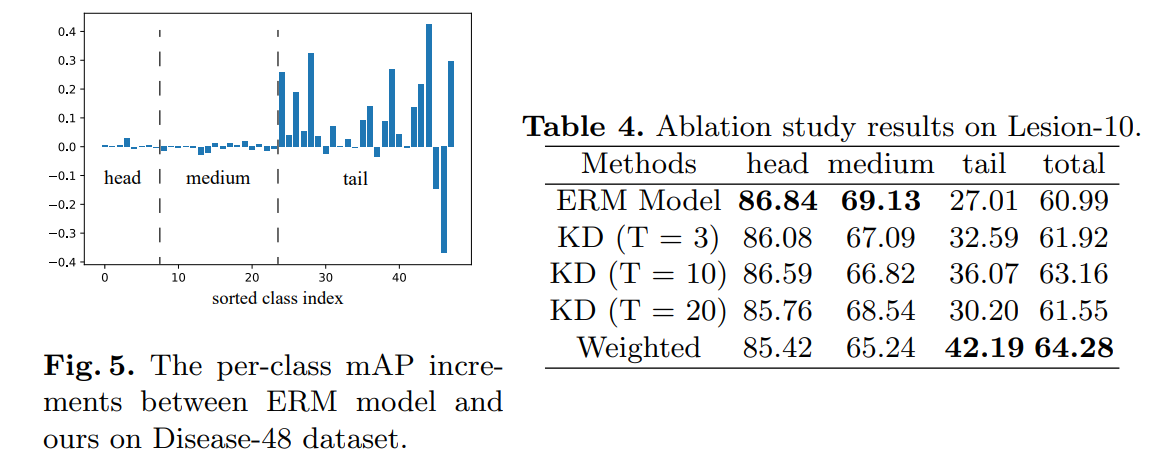
【解决视网膜长尾数据】关系子集学习、射击法、加权知识蒸馏

SSM的医院预约挂号平台
力扣hot100 不同路径 多维DP 滚动数组 数论

ElementUI Form:Input 输入框

【蓝桥杯日记】复盘篇三——循环结构

Unity DOTween插件常用方法(二)