分布式事务组件Seata的TCC常见问题及解决方案
在 TCC 模型执行的过程中,还可能会出现各种异常,其中最为常见的有空回滚、幂等、悬挂等。TCC 模式是分布式事务中非常重要的事务模式,但是幂等、悬挂和空回滚一直是 TCC 模式需要考虑的问题,Seata 框架在 1.5.1 版本完美解决了这些问题。
1. 空回滚
空回滚指的是在一个分布式事务中,在没有调用参与方的 Try 方法的情况下,TM 驱动二阶段回滚调用了参与方的 Cancel 方法。
-
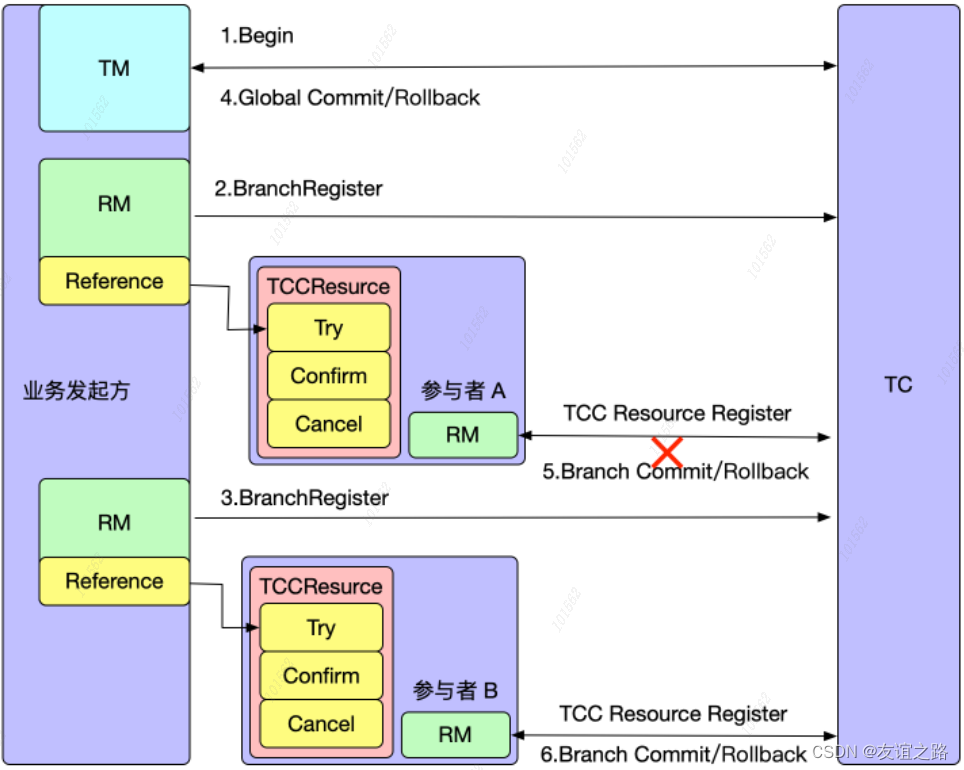
那么空回滚是如何产生的呢?
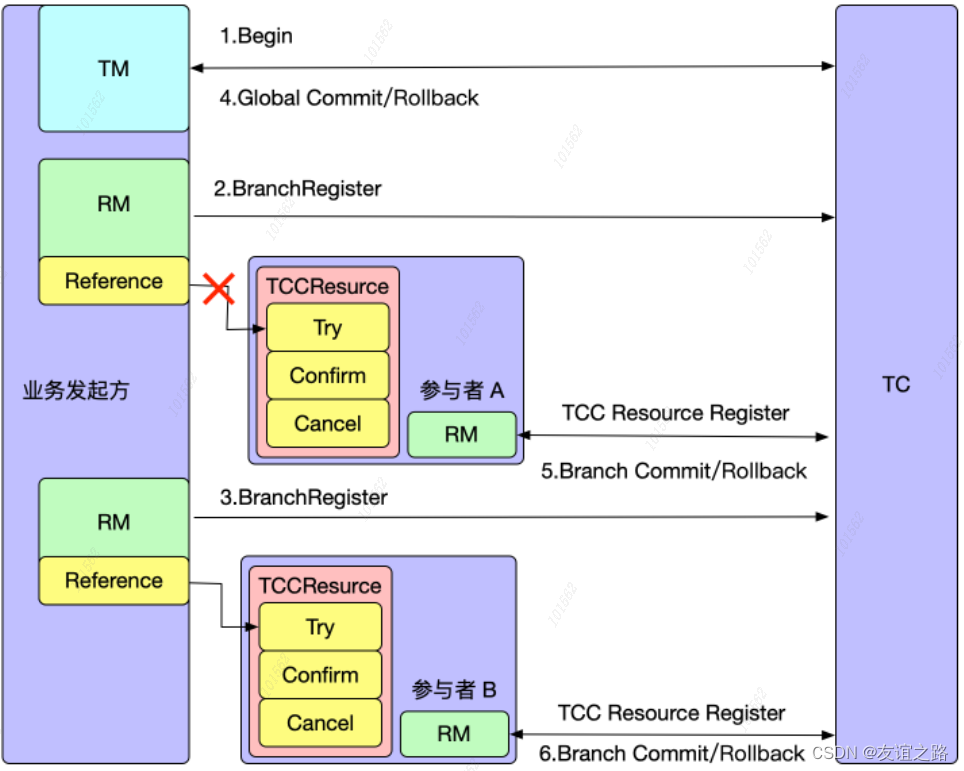
如上图所示,全局事务开启后,参与者 A 分支注册完成之后会执行参与者一阶段 RPC 方法,如果此时参与者 A 所在的机器发生宕机,网络异常,都会造成 RPC 调用失败,即参与者 A 一阶段方法未成功执行,但是此时全局事务已经开启,Seata 必须要推进到终态,在全局事务回滚时会调用参与者 A 的 Cancel 方法,从而造成空回滚。 -
要想防止空回滚,那么必须在 Cancel 方法中识别这是一个空回滚,Seata 是如何做的呢?
Seata 的做法是新增一个 TCC 事务控制表,包含事务的 XID 和 BranchID 信息,在 Try 方法执行时插入一条记录,表示一阶段执行了,执行 Cancel 方法时读取这条记录,如果记录不存在,说明 Try 方法没有执行。
2. 幂等
幂等问题指的是 TC 重复进行二阶段提交,因此 Confirm/Cancel 接口需要支持幂等处理,即不会产生资源重复提交或者重复释放。
-
那么幂等问题是如何产生的呢?
如上图所示,参与者 A 执行完二阶段之后,由于网络抖动或者宕机问题,会造成 TC 收不到参与者 A 执行二阶段的返回结果,TC 会重复发起调用,直到二阶段执行结果成功。 -
Seata 是如何处理幂等问题的呢?
同样的也是在 TCC 事务控制表中增加一个记录状态的字段 status,该字段有 3 个值,分别为:
tried:1
committed:2
rollbacked:3
二阶段 Confirm/Cancel 方法执行后,将状态改为 committed 或 rollbacked 状态。当重复调用二阶段 Confirm/Cancel 方法时,判断事务状态即可解决幂等问题。
3. 悬挂
悬挂指的是二阶段 Cancel 方法比 一阶段 Try 方法优先执行,由于允许空回滚的原因,在执行完二阶段 Cancel 方法之后直接空回滚返回成功,此时全局事务已结束,但是由于 Try 方法随后执行,这就会造成一阶段 Try 方法预留的资源永远无法提交和释放了。
-
那么悬挂是如何产生的呢?
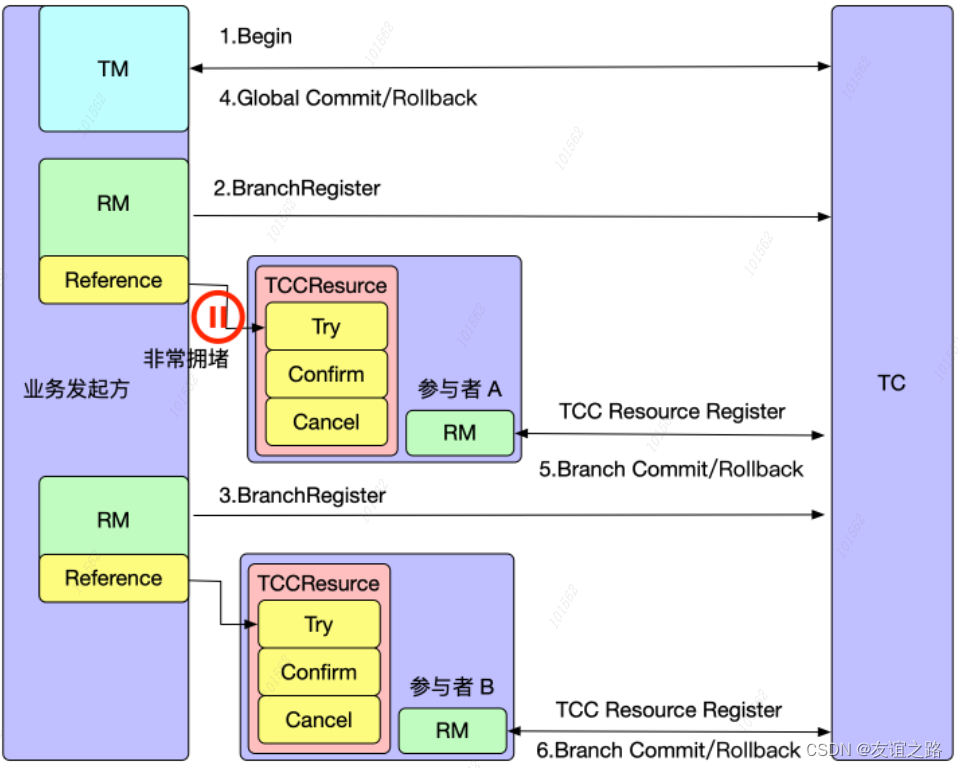
如上图所示,在执行参与者 A 的一阶段 Try 方法时,出现网路拥堵,由于 Seata 全局事务有超时限制,执行 Try 方法超时后,TM 决议全局回滚,回滚完成后如果此时 RPC 请求才到达参与者 A,执行 Try 方法进行资源预留,从而造成悬挂。 -
Seata 是怎么处理悬挂的呢?
在 TCC 事务控制表记录状态的字段 status 中增加一个状态:
suspended:4
当执行二阶段 Cancel 方法时,如果发现 TCC 事务控制表有相关记录,说明二阶段 Cancel 方法优先一阶段 Try 方法执行,因此插入一条 status=4 状态的记录,当一阶段 Try 方法后面执行时,判断 status=4 ,则说明有二阶段 Cancel 已执行,并返回 false 以阻止一阶段 Try 方法执行成功。