编译正点原子的出厂 Linux 内核源码,为后面移植linux做准备。研究对象如下:
1)、linux内核镜像文件“uImage”
路径为“arch/arm/boot”;
2)、设备树文件“stm32mp157d-atk.dtb”
路径为“arch/arm/boot/dts”
3)、默认配置文件“stm32mp1_atk_defconfig”
路径为“arch/arm/configs”
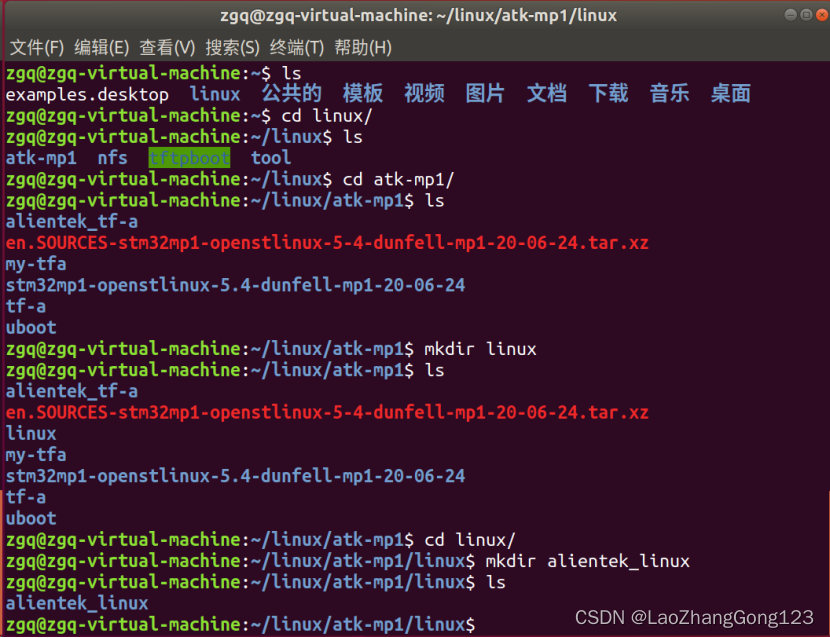
1、创建“alientek_linux”目录,用来存放正点原子的linux源码
打开终端
输入“ls回车”
输入“cd linux/回车”,切换到“linux”目录
输入“ls回车”,列出“linux”目录下的文件和文件夹
输入“cd atk-mp1/回车” ,切换到“atk-mp1”目录
输入“ls回车”,列出“atk-mp1”目录下的文件和文件夹
输入“mkdir linux/回车”,在“/linux/atk-mp1/”目录下创建“linux”目录;
输入“cd linux/回车” ,切换到“linux”目录
输入“mkdir alientek_linux/回车”,在“/linux/atk-mp1/linux”目录下创建“alientek_linux”目录;
输入“ls回车”,列出“/linux/atk-mp1/linux”目录下的文件和文件夹
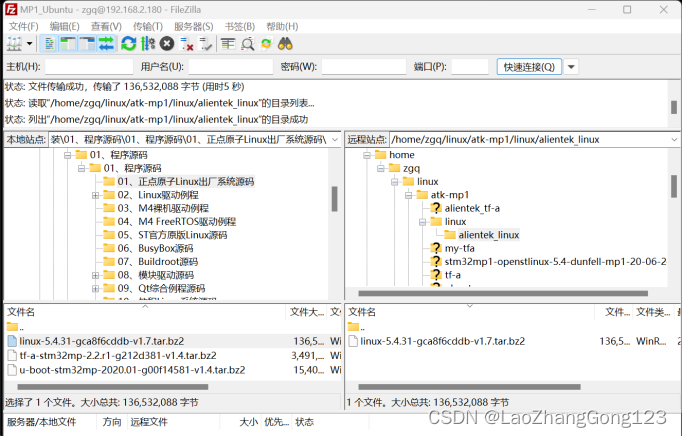
2、将“linux-5.4.31-gca8f6cddb-v1.7.tar.bz2”压缩包,使用FileZilla把它拷贝到“/linux/atk-mp1/linux/alientek_linux”目录下。该文件位于“01、程序源码\01、正点原子Linux出厂系统源码”目录中。
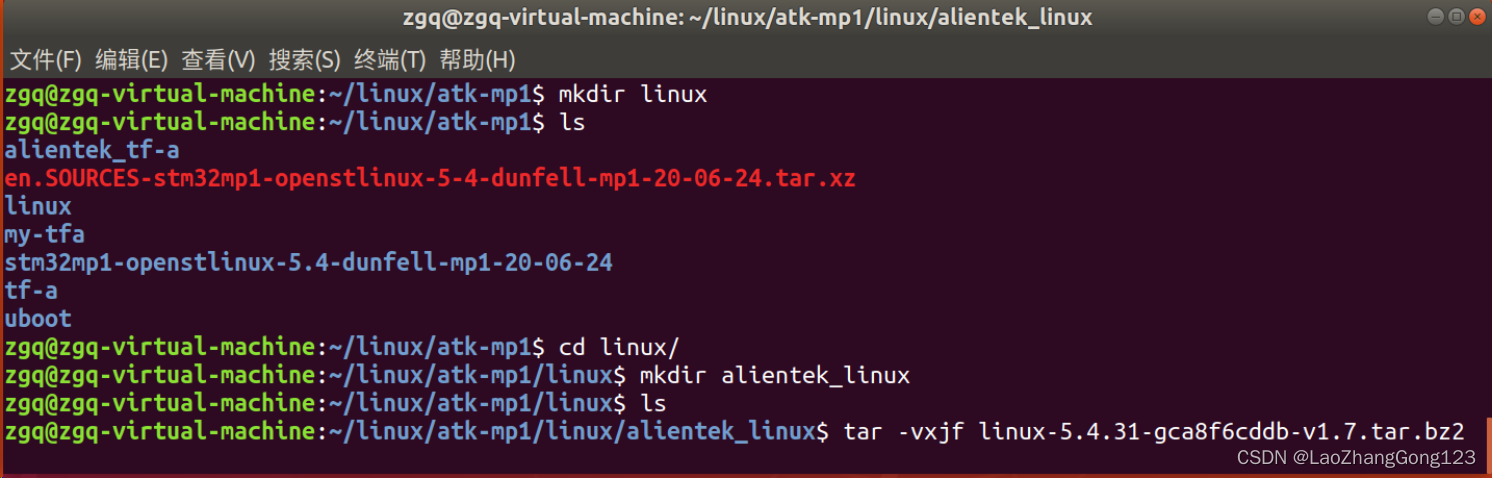
3、输入“cd alientek_linux/回车”,切换到“alientek_linux”目录
输入“ls回车”,列出“alientek_linux”目录下的文件和文件夹
输入“tar -vxjf linux-5.4.31-gca8f6cddb-v1.7.tar.bz2回车”,解压
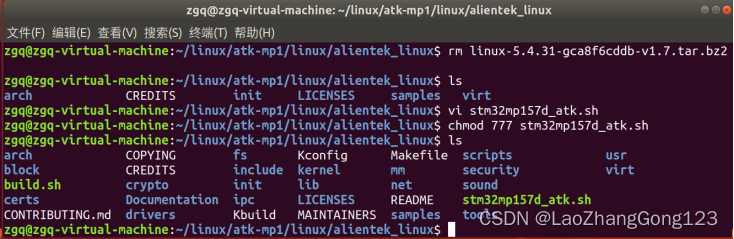
4、输入“ls回车”,列出“alientek_linux”目录下的文件和文件夹
输入“rm linux-5.4.31-gca8f6cddb-v1.7.tar.bz2回车”,删除压缩包

5、创建脚本文件“stm32mp157d_atk.sh”
输入“vi stm32mp157d_atk.sh回车”,新建一个脚本文件“stm32mp157d_atk.sh”
如果在第1次编译时,脚本文件如下:
#!/bin/sh
make ARCH=arm CROSS_COMPILE=arm-none-linux-gnueabihf- distclean
#清除工程,删除“.config”文件,执行1次即可,以后就不要再执行了。
make ARCH=arm CROSS_COMPILE=arm-none-linux-gnueabihf- stm32mp1_atk_defconfig
#设置为默认配置,执行1次即可,以后就不需要执行该语句了。
#“stm32mp1_atk_defconfig”位于“arch/arm/configs”目录下;
make ARCH=arm CROSS_COMPILE=arm-none-linux-gnueabihf- menuconfig
#打开图形化配置界面
make ARCH=arm CROSS_COMPILE=arm-none-linux-gnueabihf- uImage dtbs LOADADDR=0XC2000040 -j8
#编译镜像文件和设备树,linux内核在DDR中的加载地址为0XC2000040,-j8表示采用8线程编译

6、按“ESC键”,输入“:wq回车”,保存文件
输入“chmod 777 stm32mp157d_atk.sh回车”,给脚本文件赋予可执行权限
7、输入“./stm32mp157d_atk.sh回车”,执行编译;
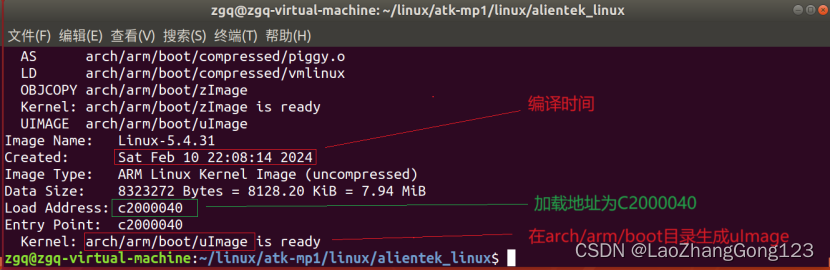
编译完成后,文件如下:
注意:
为什么uboot里面的uImage的地址是0xC2000000,编译linux的时候,指定的的LOADADDR是0xC2000040?
因为linux的uImage最前面的Ox40个字节是头部信息。
编译得到“arch/arm/boot/uImage”
设备树:“arch/arm/boot/dts/stm32mp157d-atk.dtb”
“stm32mp1_atk_defconfig”位于“arch/arm/configs”目录下;
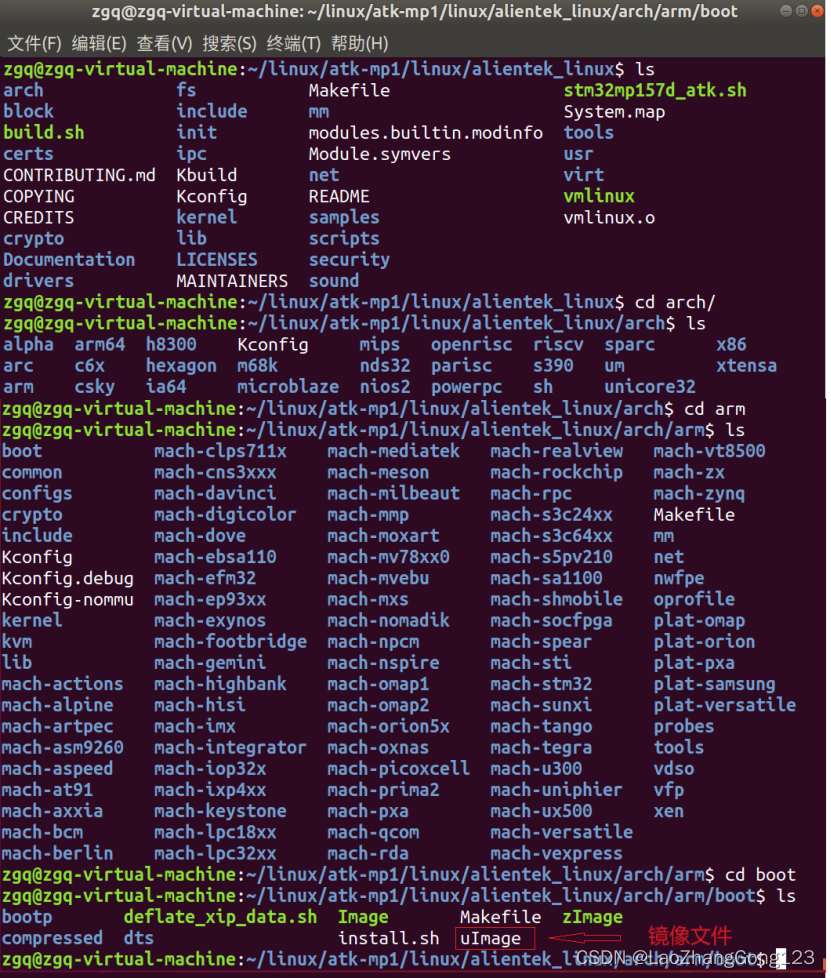
8、查询是否生成了uImage文件
输入“ls回车”
输入“cd arch/回车”
输入“ls回车”
输入“cd arm/回车”
输入“ls回车”
输入“cd boot/回车”
输入“ls回车”
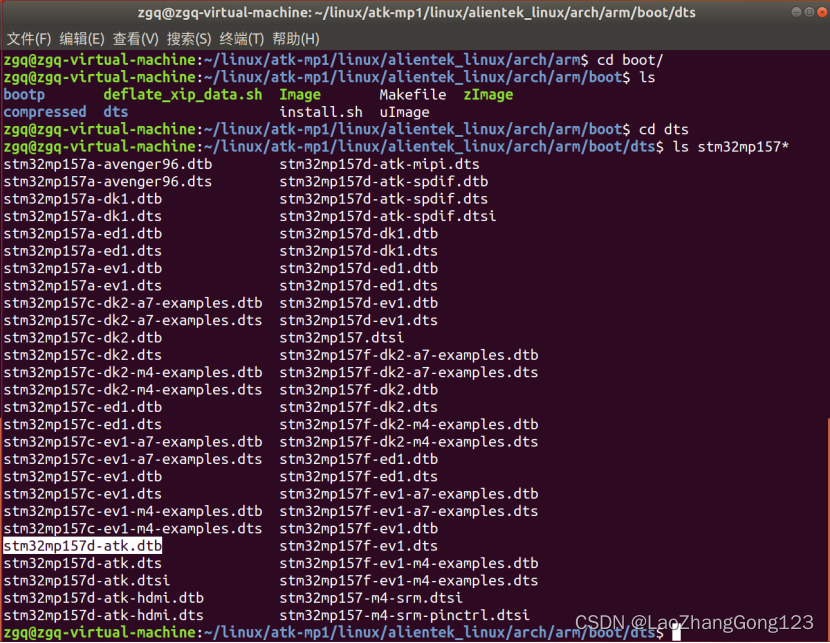
9、查询是否生成了“stm32mp157d-atk.dtb”文件
输入“cd dts/回车”
输入“ls stm32mp157*回车”
10、将“stm32mp157d-atk.dtb”拷贝到“/home/zgq/linux/tftpboot/”目录下
打开第2个终端,查看tftpboot是不是存在
输入“ls回车”
输入“cd linux/回车”,切换到“linux”目录
输入“ls回车”,列出“linux”目录下的文件和文件夹
输入“cd tftpboot/回车”,切换到“tftpboot”目录
输入“ls回车”,列出“tftpboot”目录下的文件和文件夹
11、回到第1个打开的终端,输入“cp stm32mp157d-atk.dtb /home/zgq/linux/tftpboot/ -f回车”,执行文件拷贝;
12、输入“cd ..回车”,回到“boot”目录下
输入“ls回车”,列出“boot”目录下的文件和文件夹
输入“cp uImage /home/zgq/linux/tftpboot/ -f回车”,执行文件拷贝;
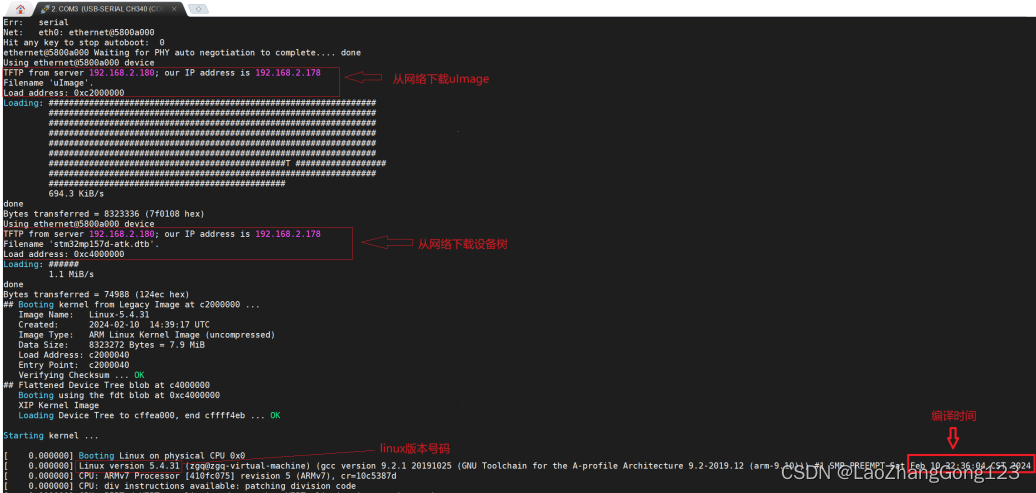
13、回到第2个打开的终端,输入“ls -l回车”
原有的“文件”被替换了。
按复位键,启动。
注意:将开发板通过网线连接到路由器,同时开启虚拟机。
14、使用VSCode创建工程
1)、点击虚拟机上的VSCode,然后点击“文件”,点击“打开文件夹”,选择“alientek_linux”

2)、点击“确定”
3)、点击“文件”,点击“将工作区另存为...”,在名称右边的文本框里输入“alientek_linux”,见下图:
4)、点击“保存”,得到下图:

5)、linux设备树头文件stm32mp157d-atk.dtsi源码,将来移植linux可以参考使用,见下图:
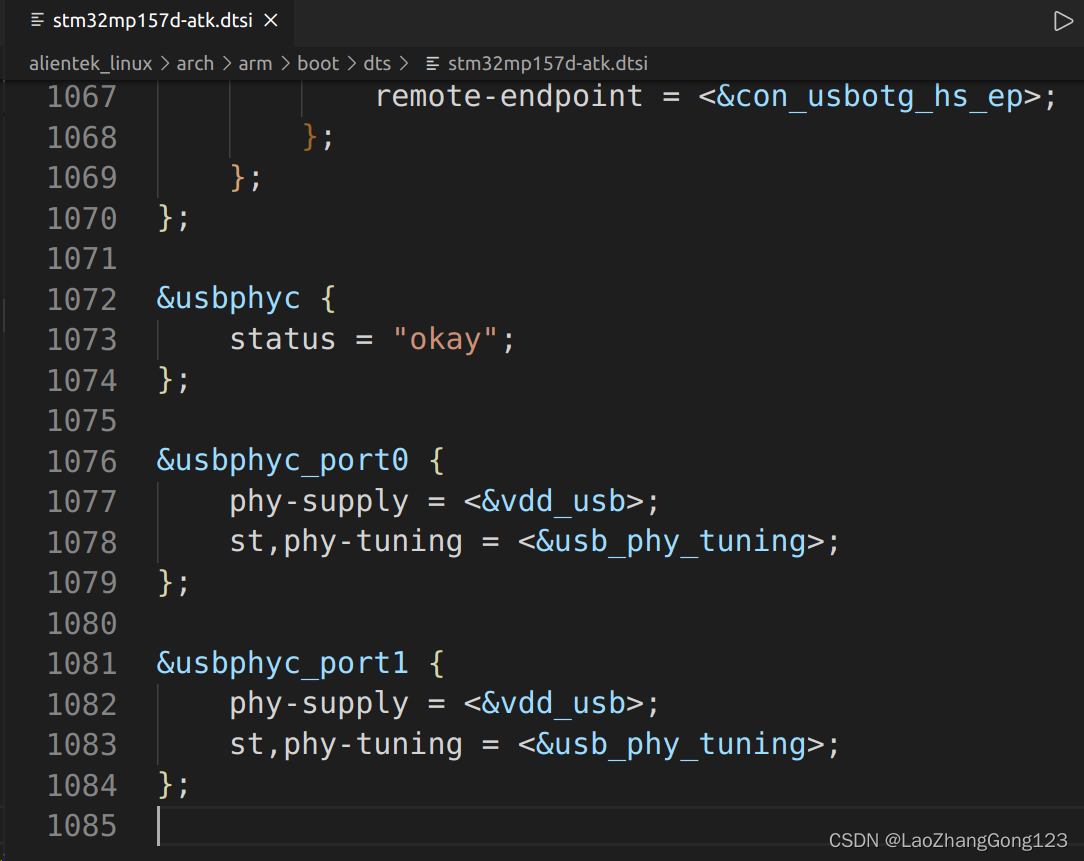
linux设备树头文件stm32mp157d-atk.dtsi源码如下:
// SPDX-License-Identifier: (GPL-2.0+ OR BSD-3-Clause)
/** Copyright (C) STMicroelectronics 2019 - All Rights Reserved* Author: Alexandre Torgue <alexandre.torgue@st.com> for STMicroelectronics.*/#include "stm32mp157-m4-srm.dtsi"
#include "stm32mp157-m4-srm-pinctrl.dtsi"
#include <dt-bindings/mfd/st,stpmic1.h>
#include <dt-bindings/usb/pd.h>/ {memory@c0000000 {device_type = "memory";reg = <0xc0000000 0x40000000>;};reserved-memory {#address-cells = <1>;#size-cells = <1>;ranges;mcuram2: mcuram2@10000000 {compatible = "shared-dma-pool";reg = <0x10000000 0x40000>;no-map;};vdev0vring0: vdev0vring0@10040000 {compatible = "shared-dma-pool";reg = <0x10040000 0x1000>;no-map;};vdev0vring1: vdev0vring1@10041000 {compatible = "shared-dma-pool";reg = <0x10041000 0x1000>;no-map;};vdev0buffer: vdev0buffer@10042000 {compatible = "shared-dma-pool";reg = <0x10042000 0x4000>;no-map;};mcuram: mcuram@30000000 {compatible = "shared-dma-pool";reg = <0x30000000 0x40000>;no-map;};retram: retram@38000000 {compatible = "shared-dma-pool";reg = <0x38000000 0x10000>;no-map;};};clocks {clk_ext_camera: clk-ext-camera {#clock-cells = <0>;compatible = "fixed-clock";clock-frequency = <24000000>;};};dht11 {compatible = "alientek,dht11";dht11-gpio = <&gpiof 2 GPIO_ACTIVE_LOW>;status = "okay";};ds18b20 {compatible = "alientek,ds18b20";ds18b20-gpio = <&gpiof 2 GPIO_ACTIVE_LOW>;status = "okay";};gpio-keys {compatible = "gpio-keys";autorepeat;key0 {label = "USER-KEY0";linux,code = <114>;gpios = <&gpiog 3 GPIO_ACTIVE_LOW>;gpio-key,wakeup;};key1 {label = "USER-KEY1";linux,code = <115>;gpios = <&gpioh 7 GPIO_ACTIVE_LOW>;gpio-key,wakeup;};};lcd_id {select_id = <0>;};leds {compatible = "gpio-leds";led1 {label = "sys-led";gpios = <&gpioi 0 GPIO_ACTIVE_LOW>;linux,default-trigger = "heartbeat";default-state = "on";status = "okay";};led2 {label = "user-led";gpios = <&gpiof 3 GPIO_ACTIVE_LOW>;linux,default-trigger = "none";default-state = "on";status = "okay";};beep {label = "beep";gpios = <&gpioc 7 GPIO_ACTIVE_LOW>;default-state = "off";};};panel_backlight: panel-backlight {compatible = "pwm-backlight";pwms = <&pwm4 1 5000000>;brightness-levels = <0 4 8 16 32 64 128 255>;power-supply = <&v3v3>;default-brightness-level = <7>;status = "okay";};usb_phy_tuning: usb-phy-tuning {st,hs-dc-level = <2>;st,fs-rftime-tuning;st,hs-rftime-reduction;st,hs-current-trim = <15>;st,hs-impedance-trim = <1>;st,squelch-level = <3>;st,hs-rx-offset = <2>;st,no-lsfs-sc;};v3v3: regulator-3p3v {compatible = "regulator-fixed";regulator-name = "v3v3";regulator-min-microvolt = <3300000>;regulator-max-microvolt = <3300000>;regulator-always-on;regulator-boot-on;};vddcore: buck1 {compatible = "regulator-fixed";regulator-name = "vddcore";regulator-min-microvolt = <1200000>;regulator-max-microvolt = <1350000>;regulator-always-on;regulator-boot-on;};vdd_usb: regulator-vdd-usb {compatible = "regulator-fixed";regulator-name = "vdd_usb";regulator-min-microvolt = <3300000>;regulator-max-microvolt = <3300000>;regulator-always-on;regulator-boot-on;};vdd: regulator-vdd {compatible = "regulator-fixed";regulator-name = "vdd";regulator-min-microvolt = <3300000>;regulator-max-microvolt = <3300000>;regulator-always-on;regulator-boot-on;};vdda: ldo1 {compatible = "regulator-fixed";regulator-name = "vdda";regulator-min-microvolt = <2900000>;regulator-max-microvolt = <2900000>;regulator-always-on;regulator-boot-on;};v1v8_audio: regulator-v1v8-audio {compatible = "regulator-fixed";regulator-name = "v1v8_audio";regulator-min-microvolt = <1800000>;regulator-max-microvolt = <1800000>;regulator-always-on;regulator-boot-on;};v2v8: regulator-v2v8 {compatible = "regulator-fixed";regulator-name = "v2v8";regulator-min-microvolt = <2800000>;regulator-max-microvolt = <2800000>;regulator-always-on;regulator-over-current-protection;};vin: regulator-vin {compatible = "regulator-fixed";regulator-name = "vin";regulator-min-microvolt = <5000000>;regulator-max-microvolt = <5000000>;regulator-always-on;regulator-boot-on;};v3v3_hdmi: regulator-v3v3-hdmi {compatible = "regulator-fixed";regulator-name = "v3v3_hdmi";regulator-min-microvolt = <3300000>;regulator-max-microvolt = <3300000>;regulator-always-on;regulator-boot-on;};v1v2_hdmi: regulator-v1v2-hdmi {compatible = "regulator-fixed";regulator-name = "v1v2_hdmi";regulator-min-microvolt = <1200000>;regulator-max-microvolt = <1200000>;regulator-always-on;regulator-boot-on;};spdif_out: spdif-out { #sound-dai-cells = <0>;compatible = "linux,spdif-dit";status = "okay";spdif_out_port: port {spdif_out_endpoint: endpoint {remote-endpoint = <&sai4a_endpoint>;};};};spdif_in: spdif-in { #sound-dai-cells = <0>;compatible = "linux,spdif-dir";status = "okay";spdif_in_port: port {spdif_in_endpoint: endpoint {remote-endpoint = <&spdifrx_endpoint>;};};};#if 1sound: sound {compatible = "audio-graph-card";label = "STM32MP1-DK";routing ="Playback" , "MCLK","Capture" , "MCLK","MICL" , "Mic Bias";dais = <&sai2a_port &sai2b_port &i2s2_port &spdifrx_port>;status = "okay";};
#elsesound: sound {compatible = "audio-graph-card";label = "STM32MP1-DK";widgets ="Microphone", "Mic Jack","Line", "Line In","Line", "Line Out","Speaker", "Speaker","Headphone", "Headphone Jack";routing ="Headphone Jack", "HP_L","Headphone Jack", "HP_R","Speaker", "SPK_LP","Speaker", "SPK_LN","Speaker", "SPK_RP","Speaker", "SPK_RN","LINPUT1", "Mic Jack","LINPUT3", "Mic Jack","RINPUT1", "Mic Jack","RINPUT2", "Mic Jack";dais = <&sai2a_port &sai2b_port &sai4a_port &spdifrx_port &i2s2_port>;status = "okay";};
#endif
};&pinctrl {dac_ch1_pins_a: dac-ch1 {pins {pinmux = <STM32_PINMUX('A', 4, ANALOG)>; /* configure 'PA4' as ANALOG */};};adc1_in6_pins_b: adc1-in6 {pins {pinmux = <STM32_PINMUX('A', 5, ANALOG)>;};};dcmi_pins_b: dcmi-1 {pins {pinmux = <STM32_PINMUX('H', 8, AF13)>,/* DCMI_HSYNC */<STM32_PINMUX('B', 7, AF13)>,/* DCMI_VSYNC */<STM32_PINMUX('A', 6, AF13)>,/* DCMI_PIXCLK */<STM32_PINMUX('H', 9, AF13)>,/* DCMI_D0 */<STM32_PINMUX('H', 10, AF13)>,/* DCMI_D1 */<STM32_PINMUX('H', 11, AF13)>,/* DCMI_D2 */<STM32_PINMUX('H', 12, AF13)>,/* DCMI_D3 */<STM32_PINMUX('H', 14, AF13)>,/* DCMI_D4 */<STM32_PINMUX('I', 4, AF13)>,/* DCMI_D5 */<STM32_PINMUX('B', 8, AF13)>,/* DCMI_D6 */<STM32_PINMUX('E', 6, AF13)>;/* DCMI_D7 */bias-disable;};};dcmi_sleep_pins_b: dcmi-sleep-1 {pins {pinmux = <STM32_PINMUX('H', 8, ANALOG)>,/* DCMI_HSYNC */<STM32_PINMUX('B', 7, ANALOG)>,/* DCMI_VSYNC */<STM32_PINMUX('A', 6, ANALOG)>,/* DCMI_PIXCLK */<STM32_PINMUX('H', 9, ANALOG)>,/* DCMI_D0 */<STM32_PINMUX('H', 10, ANALOG)>,/* DCMI_D1 */<STM32_PINMUX('H', 11, ANALOG)>,/* DCMI_D2 */<STM32_PINMUX('H', 12, ANALOG)>,/* DCMI_D3 */<STM32_PINMUX('H', 14, ANALOG)>,/* DCMI_D4 */<STM32_PINMUX('I', 4, ANALOG)>,/* DCMI_D5 */<STM32_PINMUX('B', 8, ANALOG)>,/* DCMI_D6 */<STM32_PINMUX('E', 6, ANALOG)>;/* DCMI_D7 */};};stusb1600_pins_b: stusb1600-0 {pins {pinmux = <STM32_PINMUX('G', 2, ANALOG)>;bias-pull-up;};};uart7_pins_b: uart7-1 {pins1 {pinmux = <STM32_PINMUX('F', 7, AF7)>, /* UART7_TX */<STM32_PINMUX('F', 8, AF7)>; /* UART7_RTS */bias-disable;drive-push-pull;slew-rate = <0>;};pins2 {pinmux = <STM32_PINMUX('F', 6, AF7)>, /* UART7_RX */<STM32_PINMUX('F', 9, AF7)>; /* UART7_CTS_NSS */bias-disable;};};uart7_idle_pins_b: uart7-idle-1 {pins1 {pinmux = <STM32_PINMUX('F', 7, ANALOG)>, /* UART7_TX */<STM32_PINMUX('F', 8, ANALOG)>, /* UART7_RTS */<STM32_PINMUX('F', 9, ANALOG)>; /* UART7_CTS_NSS */};pins2 {pinmux = <STM32_PINMUX('F', 6, AF7)>; /* UART7_RX */bias-disable;};};uart7_sleep_pins_b: uart7-sleep-1 {pins {pinmux = <STM32_PINMUX('F', 7, ANALOG)>, /* UART7_TX */<STM32_PINMUX('F', 8, ANALOG)>, /* UART7_RTS */<STM32_PINMUX('F', 6, ANALOG)>, /* UART7_RX */<STM32_PINMUX('F', 9, ANALOG)>; /* UART7_CTS_NSS */};};usart3_pins_c: uart3-0 {pins1 {pinmux = <STM32_PINMUX('D', 8, AF7)>; /* UART5_TX */bias-disable;drive-push-pull;slew-rate = <0>;};pins2 {pinmux = <STM32_PINMUX('D', 9, AF7)>; /* UART5_RX */bias-disable;};};usart3_idle_pins_c: uart3-idle-0 {pins1 {pinmux = <STM32_PINMUX('D', 8, ANALOG)>; /* UART5_TX */};pins2 {pinmux = <STM32_PINMUX('D', 9, AF7)>; /* UART5_RX */bias-disable;};};usart3_sleep_pins_c: uart3-sleep-0 {pins {pinmux = <STM32_PINMUX('D', 8, ANALOG)>, /* UART5_TX */<STM32_PINMUX('D', 9, ANALOG)>; /* UART5_RX */};};uart5_pins_a: uart5-0 {pins1 {pinmux = <STM32_PINMUX('B', 13, AF14)>; /* UART5_TX */bias-disable;drive-push-pull;slew-rate = <0>;};pins2 {pinmux = <STM32_PINMUX('B', 12, AF14)>; /* UART5_RX */bias-disable;};};uart5_idle_pins_a: uart5-idle-0 {pins1 {pinmux = <STM32_PINMUX('B', 13, ANALOG)>; /* UART5_TX */};pins2 {pinmux = <STM32_PINMUX('B', 12, AF14)>; /* UART5_RX */bias-disable;};};uart5_sleep_pins_a: uart5-sleep-0 {pins {pinmux = <STM32_PINMUX('B', 13, ANALOG)>, /* UART5_TX */<STM32_PINMUX('B', 12, ANALOG)>; /* UART5_RX */};};i2s2_pins_b: i2s2-2 {pins {pinmux = <STM32_PINMUX('C', 3, AF5)>, /* I2S2_SDO */<STM32_PINMUX('B', 9, AF5)>, /* I2S2_WS */<STM32_PINMUX('B', 10, AF5)>; /* I2S2_CK */slew-rate = <1>;drive-push-pull;bias-disable;};};i2s2_pins_sleep_b: i2s2-3 {pins {pinmux = <STM32_PINMUX('C', 3, ANALOG)>, /* I2S2_SDO */<STM32_PINMUX('B', 9, ANALOG)>, /* I2S2_WS */<STM32_PINMUX('B', 10, ANALOG)>; /* I2S2_CK */};};
};&adc {/* ADC1 & ADC2 common resources */pinctrl-names = "default";pinctrl-0 = <&adc1_in6_pins_b>;vdd-supply = <&vdd>;vdda-supply = <&vdd>;vref-supply = <&vdd>;status = "okay";adc1: adc@0 {/* private resources for ADC1 */st,adc-channels = <19>;st,min-sample-time-nsecs = <10000>;status = "okay";};
};&m_can1 {pinctrl-names = "default", "sleep";pinctrl-0 = <&m_can1_pins_a>;pinctrl-1 = <&m_can1_sleep_pins_a>;status = "okay";
};&cec {pinctrl-names = "default", "sleep";pinctrl-0 = <&cec_pins_b>;pinctrl-1 = <&cec_pins_sleep_b>;status = "okay";
};&crc1 {status = "okay";
};&dac {pinctrl-names = "default";pinctrl-0 = <&dac_ch1_pins_a>; /* Use PA4 and PA5 pin as ANALOG */vref-supply = <&v3v3>; /* Example to use VREFBUF (It needs to be enabled as well) */status = "okay"; /* Enable the DAC block */dac1: dac@1 {status = "okay"; /* Enable DAC1 */};
};&dcmi {status = "okay";pinctrl-names = "default", "sleep";pinctrl-0 = <&dcmi_pins_b>;pinctrl-1 = <&dcmi_sleep_pins_b>;port {dcmi_0: endpoint {remote-endpoint = <&ov5640_0>;bus-width = <8>;hsync-active = <0>;vsync-active = <0>;pclk-sample = <1>;pclk-max-frequency = <77000000>;};};
};&dma1 {sram = <&dma_pool>;
};&dma2 {sram = <&dma_pool>;
};&dts {status = "okay";
};ðernet0 {status = "okay";pinctrl-0 = <ðernet0_rgmii_pins_a>;pinctrl-1 = <ðernet0_rgmii_pins_sleep_a>;pinctrl-names = "default", "sleep";phy-mode = "rgmii-id";max-speed = <1000>;phy-handle = <&phy0>;mdio0 {#address-cells = <1>;#size-cells = <0>;compatible = "snps,dwmac-mdio";phy0: ethernet-phy@0 {reg = <0>;};};
};&gpu {contiguous-area = <&gpu_reserved>;status = "okay";
};&hash1 {status = "okay";
};&ipcc {status = "okay";
};&i2c1 {pinctrl-names = "default", "sleep";pinctrl-0 = <&i2c1_pins_b>;pinctrl-1 = <&i2c1_pins_sleep_b>;i2c-scl-rising-time-ns = <100>;i2c-scl-falling-time-ns = <7>;status = "okay";/delete-property/dmas;/delete-property/dma-names;stusb1600@28 {compatible = "st,stusb1600";reg = <0x28>;interrupts = <2 IRQ_TYPE_EDGE_FALLING>;interrupt-parent = <&gpiog>;pinctrl-names = "default";pinctrl-0 = <&stusb1600_pins_b>;status = "okay";vdd-supply = <&vin>;connector {compatible = "usb-c-connector";label = "USB-C";power-role = "dual";power-opmode = "default";port {con_usbotg_hs_ep: endpoint {remote-endpoint = <&usbotg_hs_ep>;};};};};typec: fusb302@22 {compatible = "fcs,fusb302","fairchild,fusb302";reg = <0x22>;pinctrl-names = "default";pinctrl-0 = <&stusb1600_pins_b>;int-n-gpios = <&gpiog 2 GPIO_ACTIVE_HIGH>;vbus-5v-gpios = <&gpioz 6 GPIO_ACTIVE_HIGH>;status = "okay";connector {compatible = "usb-c-connector";label = "USB-C";power-role = "dual";power-opmode = "default";try-power-role = "sink";source-pdos = <PDO_FIXED(5000, 3000, PDO_FIXED_USB_COMM)>;sink-pdos = <PDO_FIXED(5000, 3000, PDO_FIXED_USB_COMM)PDO_VAR(3000, 12000, 3000)PDO_PPS_APDO(3000, 11000, 3000)>;op-sink-microwatt = <10000000>;};};
};&i2c2 {pinctrl-names = "default", "sleep";pinctrl-0 = <&i2c2_pins_a>;pinctrl-1 = <&i2c2_pins_sleep_a>;i2c-scl-rising-time-ns = <185>;i2c-scl-falling-time-ns = <20>;status = "okay";/delete-property/dmas;/delete-property/dma-names;hdmi: hdmi-transmitter@39 {compatible = "sil,sii9022";reg = <0x39>;iovcc-supply = <&v3v3_hdmi>;cvcc12-supply = <&v1v2_hdmi>;reset-gpios = <&gpioa 3 GPIO_ACTIVE_LOW>;interrupts = <6 IRQ_TYPE_EDGE_FALLING>;interrupt-parent = <&gpioh>;#sound-dai-cells = <1>;status = "okay";ports {#address-cells = <1>;#size-cells = <0>;port@0 {reg = <0>;sii9022_in: endpoint {remote-endpoint = <<dc_ep0_out>;};};port@3 {reg = <3>;sii9022_tx_endpoint: endpoint {remote-endpoint = <&i2s2_endpoint>;};};};};
};&i2c4 {pinctrl-names = "default", "sleep";pinctrl-0 = <&i2c4_pins_a>;pinctrl-1 = <&i2c4_pins_sleep_a>;i2c-scl-rising-time-ns = <185>;i2c-scl-falling-time-ns = <20>;status = "okay";/delete-property/dmas;/delete-property/dma-names;pcf8563@51{compatible = "nxp,pcf8563";irq_gpio = <&gpioi 3 IRQ_TYPE_EDGE_FALLING>;reg = <0x51>;};
#if 0wm8960: wm8960@1a {compatible = "wlf,wm8960";reg = <0x1a>;#sound-dai-cells = <0>;status = "okay";//wlf,shared-lrclk;wlf,capless;clocks = <&sai2a>;clock-names = "MCLK1";ports {#address-cells = <1>;#size-cells = <0>;wm8960_tx_port: port@0 {reg = <0>;wm8960_tx_endpoint: endpoint {remote-endpoint = <&sai2a_endpoint>;};};wm8960_rx_port: port@1 {reg = <1>;wm8960_rx_endpoint: endpoint {remote-endpoint = <&sai2b_endpoint>;};};};};
#elsecs42l51: cs42l51@4a {compatible = "cirrus,cs42l51";reg = <0x4a>;#sound-dai-cells = <0>;VL-supply = <&v3v3>;VD-supply = <&v1v8_audio>;VA-supply = <&v1v8_audio>;VAHP-supply = <&v1v8_audio>;reset-gpios = <&gpioz 7 GPIO_ACTIVE_LOW>;clocks = <&sai2a>;clock-names = "MCLK";status = "okay";cs42l51_port: port {#address-cells = <1>;#size-cells = <0>;cs42l51_tx_endpoint: endpoint@0 {reg = <0>;remote-endpoint = <&sai2a_endpoint>;frame-master;bitclock-master;};cs42l51_rx_endpoint: endpoint@1 {reg = <1>;remote-endpoint = <&sai2b_endpoint>;frame-master;bitclock-master;};};};
#endif
};&i2c5 {pinctrl-names = "default", "sleep";pinctrl-0 = <&i2c5_pins_a>;pinctrl-1 = <&i2c5_pins_sleep_a>;i2c-scl-rising-time-ns = <100>;i2c-scl-falling-time-ns = <7>;status = "okay";/delete-property/dmas;/delete-property/dma-names;ap3216c@1e {compatible = "LiteOn,ap3216c";reg = <0x1e>;};ov5640: camera@3c {compatible = "ovti,ov5640";reg = <0x3c>;clocks = <&clk_ext_camera>;clock-names = "xclk";DOVDD-supply = <&v2v8>;powerdown-gpios = <&gpioe 11 (GPIO_ACTIVE_HIGH | GPIO_PUSH_PULL)>;reset-gpios = <&gpioe 1 (GPIO_ACTIVE_LOW | GPIO_PUSH_PULL)>;rotation = <180>;status = "okay";port {ov5640_0: endpoint {remote-endpoint = <&dcmi_0>;bus-width = <8>;data-shift = <2>;hsync-active = <0>;vsync-active = <0>;pclk-sample = <1>;pclk-max-frequency = <77000000>;};};};
};&i2s2 {clocks = <&rcc SPI2>, <&rcc SPI2_K>, <&rcc PLL3_Q>, <&rcc PLL3_R>;clock-names = "pclk", "i2sclk", "x8k", "x11k";pinctrl-names = "default", "sleep";pinctrl-0 = <&i2s2_pins_a>;pinctrl-1 = <&i2s2_pins_sleep_a>;status = "okay";i2s2_port: port {i2s2_endpoint: endpoint {remote-endpoint = <&sii9022_tx_endpoint>;format = "i2s";mclk-fs = <256>;};};
};&iwdg2 {timeout-sec = <32>;status = "okay";
};<dc {pinctrl-names = "default", "sleep";pinctrl-0 = <<dc_pins_b>;pinctrl-1 = <<dc_pins_sleep_b>;status = "okay";port {#address-cells = <1>;#size-cells = <0>;ltdc_ep0_out: endpoint@0 {reg = <0>;remote-endpoint = <&sii9022_in>;};};
};&m4_rproc {memory-region = <&retram>, <&mcuram>, <&mcuram2>, <&vdev0vring0>,<&vdev0vring1>, <&vdev0buffer>;mboxes = <&ipcc 0>, <&ipcc 1>, <&ipcc 2>;mbox-names = "vq0", "vq1", "shutdown";interrupt-parent = <&exti>;interrupts = <68 1>;wakeup-source;status = "okay";
};&rng1 {status = "okay";
};&sai2 {clocks = <&rcc SAI2>, <&rcc PLL3_Q>, <&rcc PLL3_R>;clock-names = "pclk", "x8k", "x11k";pinctrl-names = "default", "sleep";pinctrl-0 = <&sai2a_pins_a>, <&sai2b_pins_b>;pinctrl-1 = <&sai2a_sleep_pins_a>, <&sai2b_sleep_pins_b>;status = "okay";sai2a: audio-controller@4400b004 {#clock-cells = <0>;dma-names = "tx";clocks = <&rcc SAI2_K>;clock-names = "sai_ck";status = "okay";sai2a_port: port {sai2a_endpoint: endpoint {remote-endpoint = <&cs42l51_tx_endpoint>;format = "i2s";mclk-fs = <256>; dai-tdm-slot-num = <2>;dai-tdm-slot-width = <32>;};};};sai2b: audio-controller@4400b024 {dma-names = "rx";st,sync = <&sai2a 2>;clocks = <&rcc SAI2_K>, <&sai2a>;clock-names = "sai_ck", "MCLK";status = "okay";sai2b_port: port {sai2b_endpoint: endpoint {remote-endpoint = <&cs42l51_rx_endpoint>;format = "i2s";mclk-fs = <256>;dai-tdm-slot-num = <2>;dai-tdm-slot-width = <32>;};};};
};&sai4 {clocks = <&rcc SAI4>, <&rcc PLL3_Q>, <&rcc PLL3_R>;clock-names = "pclk", "x8k", "x11k";status = "okay";sai4a: audio-controller@50027004 {pinctrl-names = "default", "sleep";pinctrl-0 = <&sai4a_pins_a>;pinctrl-1 = <&sai4a_sleep_pins_a>;dma-names = "tx";clocks = <&rcc SAI4_K>;clock-names = "sai_ck";st,iec60958;status = "okay";sai4a_port: port {sai4a_endpoint: endpoint {remote-endpoint = <&spdif_out_endpoint>;};};};
};&sdmmc1 {pinctrl-names = "default", "opendrain", "sleep";pinctrl-0 = <&sdmmc1_b4_pins_a>;pinctrl-1 = <&sdmmc1_b4_od_pins_a>;pinctrl-2 = <&sdmmc1_b4_sleep_pins_a>;broken-cd;st,neg-edge;bus-width = <4>;vmmc-supply = <&v3v3>;status = "okay";
};&sdmmc2 {pinctrl-names = "default", "opendrain", "sleep";pinctrl-0 = <&sdmmc2_b4_pins_a>;pinctrl-1 = <&sdmmc2_b4_od_pins_a>;pinctrl-2 = <&sdmmc2_b4_sleep_pins_a>;non-removable;st,neg-edge;bus-width = <8>;vmmc-supply = <&v3v3>;keep-power-in-suspend;status = "okay";
};&sdmmc3 {arm,primecell-periphid = <0x10153180>;pinctrl-names = "default", "opendrain", "sleep";pinctrl-0 = <&sdmmc3_b4_pins_a>;pinctrl-1 = <&sdmmc3_b4_od_pins_a>;pinctrl-2 = <&sdmmc3_b4_sleep_pins_a>;non-removable;st,neg-edge;bus-width = <4>;vmmc-supply = <&v3v3>;status = "okay";keep-power-in-suspend;
};&spdifrx {pinctrl-names = "default", "sleep";pinctrl-0 = <&spdifrx_pins_a>;pinctrl-1 = <&spdifrx_pins_a>;status = "okay";spdifrx_port: port {spdifrx_endpoint: endpoint {remote-endpoint = <&spdif_in_endpoint>;};};
};&sram {dma_pool: dma_pool@0 {reg = <0x50000 0x10000>;pool;};
};&spi1 {pinctrl-names = "default", "sleep";pinctrl-0 = <&spi1_pins_a>;pinctrl-1 = <&spi1_sleep_pins_a>;cs-gpios = <&gpioz 3 GPIO_ACTIVE_LOW>;status = "okay";spidev: icm20608@0 {compatible = "alientek,icm20608";reg = <0>; /* CS #0 */spi-max-frequency = <8000000>;};
};&timers4 {status = "okay";/* spare dmas for other usage *//delete-property/dmas;/delete-property/dma-names;pwm4: pwm {pinctrl-0 = <&pwm4_pins_b>;pinctrl-1 = <&pwm4_sleep_pins_b>;pinctrl-names = "default", "sleep";#pwm-cells = <2>;status = "okay";};
};&usart3 {pinctrl-names = "default", "sleep", "idle";pinctrl-0 = <&usart3_pins_c>;pinctrl-1 = <&usart3_sleep_pins_c>;pinctrl-2 = <&usart3_idle_pins_c>;/delete-property/dmas;/delete-property/dma-names;status = "okay";
};&uart4 {pinctrl-names = "default", "sleep", "idle", "no_console_suspend";pinctrl-0 = <&uart4_pins_a>;pinctrl-1 = <&uart4_sleep_pins_a>;pinctrl-2 = <&uart4_idle_pins_a>;pinctrl-3 = <&uart4_pins_a>;/delete-property/dmas;/delete-property/dma-names;status = "okay";
};&uart5 {pinctrl-names = "default", "sleep", "idle";pinctrl-0 = <&uart5_pins_a>;pinctrl-1 = <&uart5_sleep_pins_a>;pinctrl-2 = <&uart5_idle_pins_a>;/delete-property/dmas;/delete-property/dma-names;status = "okay";
};&uart7 {pinctrl-names = "default", "sleep", "idle";pinctrl-0 = <&uart7_pins_b>;pinctrl-1 = <&uart7_sleep_pins_b>;pinctrl-2 = <&uart7_idle_pins_b>;/delete-property/dmas;/delete-property/dma-names;st,hw-flow-ctrl;status = "okay";
};&usbh_ehci {phys = <&usbphyc_port0>;status = "okay";
};&usbotg_hs {phys = <&usbphyc_port1 0>;phy-names = "usb2-phy";usb-role-switch;status = "okay";port {usbotg_hs_ep: endpoint {remote-endpoint = <&con_usbotg_hs_ep>;};};
};&usbphyc {status = "okay";
};&usbphyc_port0 {phy-supply = <&vdd_usb>;st,phy-tuning = <&usb_phy_tuning>;
};&usbphyc_port1 {phy-supply = <&vdd_usb>;st,phy-tuning = <&usb_phy_tuning>;
};
至此,编译正点原子的出厂Linux内核源码完成。