前言
生成式建模的扩散思想实际上已经在2015年(Sohl-Dickstein等人)提出,然而,直到2019年斯坦福大学(Song等人)、2020年Google Brain(Ho等人)才改进了这个方法,从此引发了生成式模型的新潮流。目前,包括OpenAI的GLIDE和DALL-E 2,海德堡大学的Latent Diffusion和Google Brain的ImageGen,都基于diffusion模型,并可以得到高质量的生成效果。本文以下讲解主要基于DDPM,并适当地增加一些目前有效的改进内容。
基本原理
扩散模型包括两个步骤:
固定的(或预设的)前向扩散过程q:该过程会逐渐将高斯噪声添加到图像中,直到最终得到纯噪声。
可训练的反向去噪扩散过程
 :训练一个神经网络,从纯噪音开始逐渐去噪,直到得到一个真实图像。
:训练一个神经网络,从纯噪音开始逐渐去噪,直到得到一个真实图像。
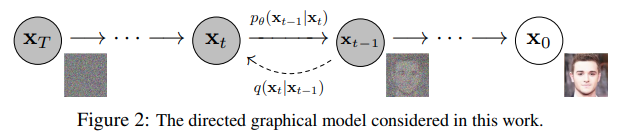
前向与后向的步数由下标 t定义,并且有预先定义好的总步数 T(DDPM原文中为1000)。
t=0 时为从数据集中采样得到的一张真实图片, t=T 时近似为一张纯粹的噪声。
2.1 直观理解
为了看懂扩散模型查了很多资料,但是要么就是大量的数学公式,一行行公式推完了还是不知道它想干啥。要么就是高视角,上来就和能量模型,VAE放一块儿对比说共同点和不同点,看完还是云里雾里。然而事实上下面几句话就能把扩散模型说明白了
扩散模型的目的是什么?
学习从纯噪声生成图片的方法
扩散模型是怎么做的?
训练一个U-Net,接受一系列加了噪声的图片,学习预测所加的噪声
前向过程在干啥?
逐步向真实图片添加噪声最终得到一个纯噪声
对于训练集中的每张图片,都能生成一系列的噪声程度不同的加噪图片
在训练时,这些 【不同程度的噪声图片 + 生成它们所用的噪声】 是实际的训练样本
反向过程在干啥?
训练好模型后,采样、生成图片
2.2 数学形式
2.2.1 前向过程
 是真实数据分布(也就是真实的大量图片),从这个分布中采样即可得到一张真实图片
是真实数据分布(也就是真实的大量图片),从这个分布中采样即可得到一张真实图片  。我们定义前向扩散过程为
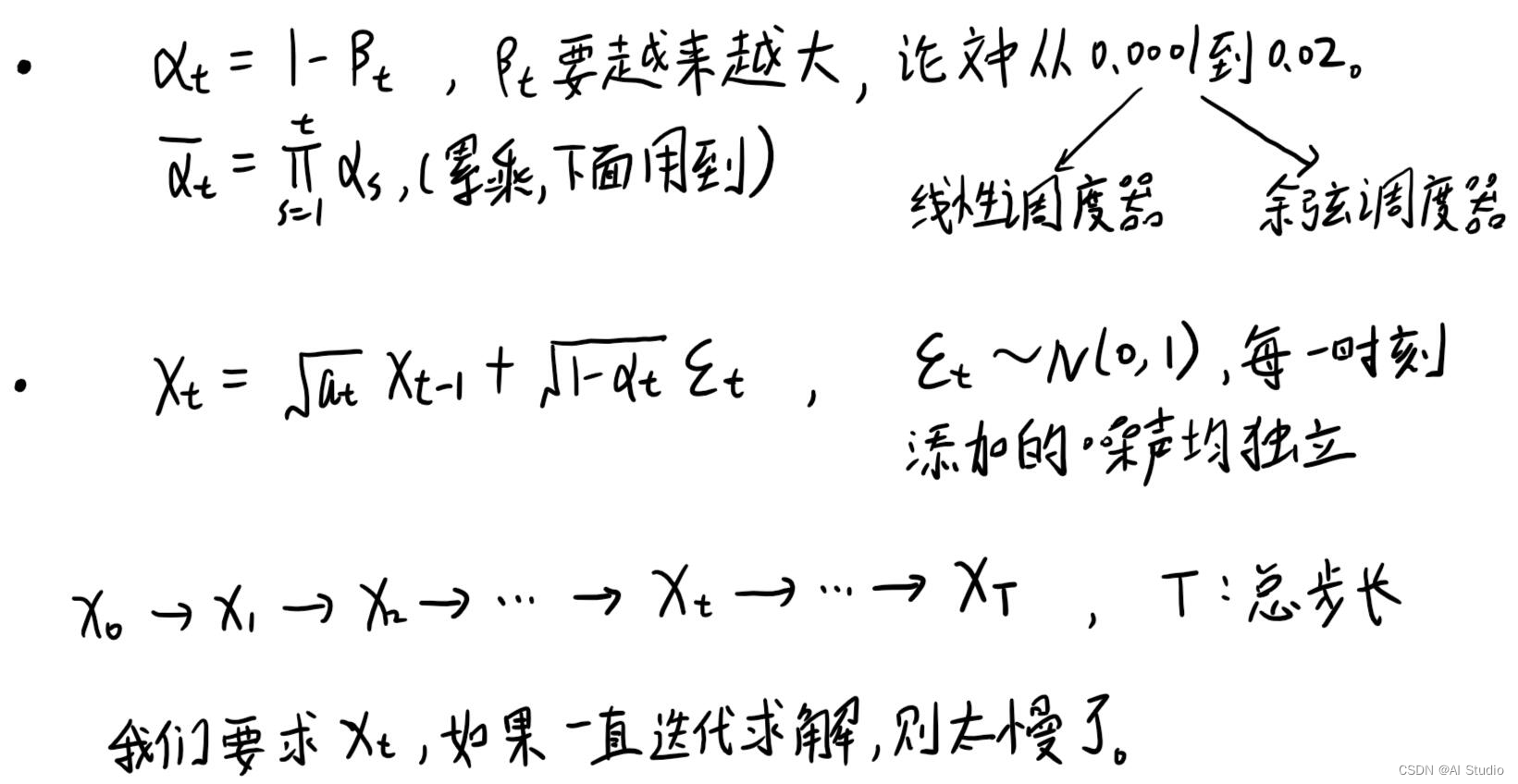
。我们定义前向扩散过程为  ,即每一个step向图片添加噪声的过程,并定义好一系列
,即每一个step向图片添加噪声的过程,并定义好一系列 ,则有:
,则有:

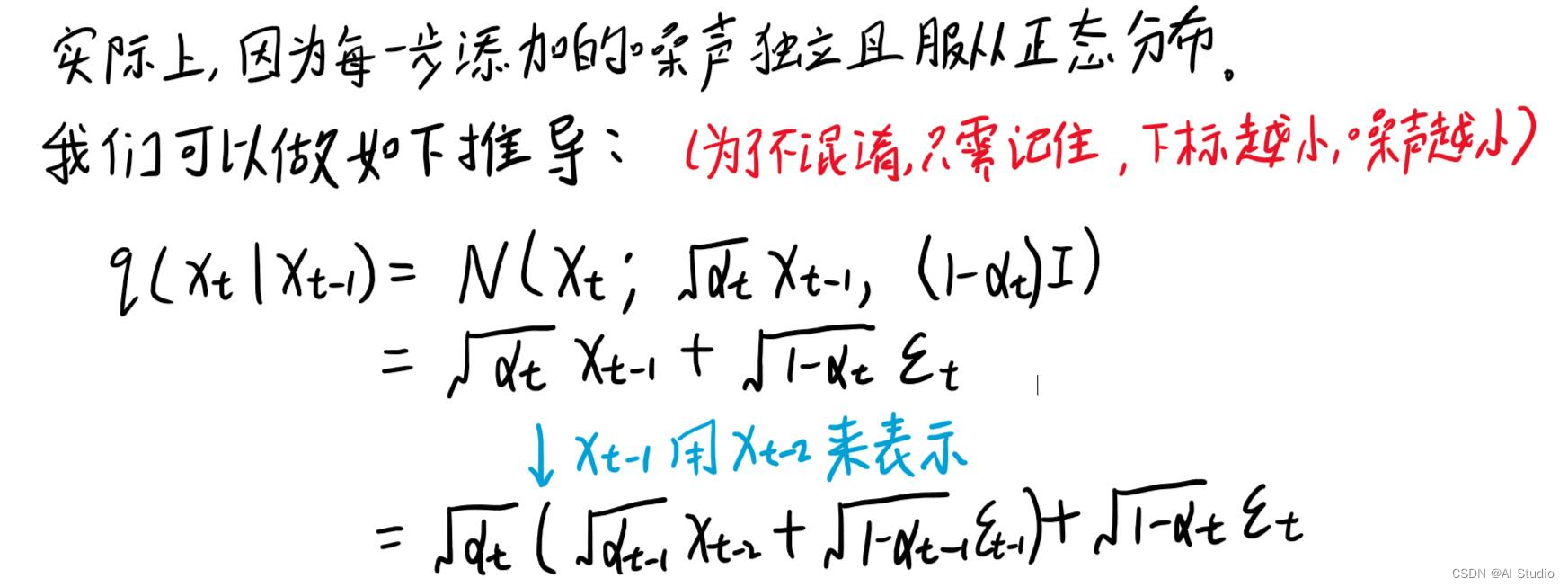
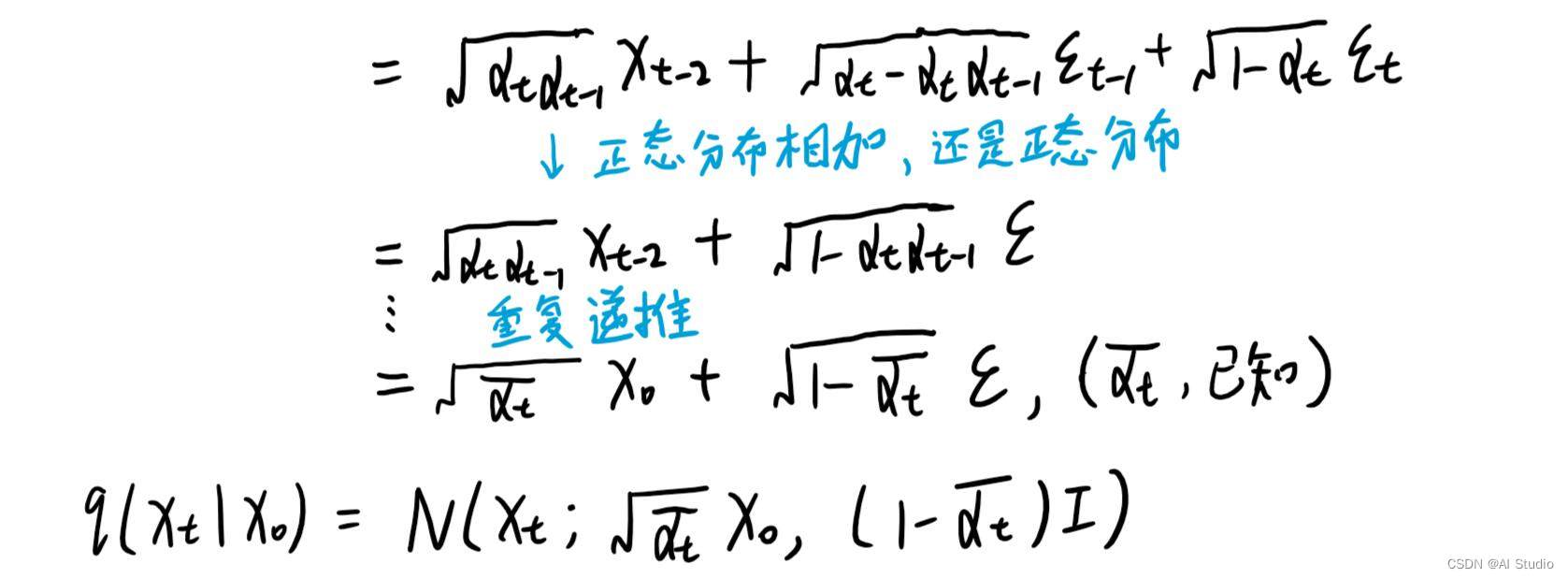
其中,N为正态分布,均值和方差分别为 ,因此通过采样标准正态分布
,因此通过采样标准正态分布 ,有:
,有:

2.2.2 反向过程
那么问题的核心就是如何得到的逆过程 ,这个过程无法直接求出来,所以我们使用神经网络去拟合这一分布。我们使用一个具有参数的神经网络去计算
,这个过程无法直接求出来,所以我们使用神经网络去拟合这一分布。我们使用一个具有参数的神经网络去计算  。假设反向的条件概率分布也是高斯分布,且高斯分布实际上只有两个参数:均值和方差,那么神经网络需要计算的实际上是
。假设反向的条件概率分布也是高斯分布,且高斯分布实际上只有两个参数:均值和方差,那么神经网络需要计算的实际上是

在DDPM中,方差被固定,网络只学习均值。而之后的改进模型中,方差也可由网络学习得到。

2.2.3 总结过程
总之,我们定义这么一个过程:给一张图片逐步加噪声直到变成纯粹的噪声,然后对噪声进行去噪得到真实的图片。所谓的扩散模型就是让神经网络学习这个去除噪声的方法。
所谓的加噪声,就是基于稍微干净的图片计算一个(多维)高斯分布(每个像素点都有一个高斯分布,且均值就是这个像素点的值,方差是预先定义的),然后从这个多维分布中抽样一个数据出来,这个数据就是加噪之后的结果。显然,如果方差非常非常小,那么每个抽样得到的像素点就和原本的像素点的值非常接近,也就是加了一个非常非常小的噪声。如果方差比较大,那么抽样结果就会和原本的结果差距较大。
去噪声也是同理,我们基于稍微噪声的图片计算一个条件分布,我们希望从这个分布中抽样得到的是相比于
2.3 网络训练流程
我们最终要训练的实际上是一个噪声预测器。神经网络输出的噪声是 ,而真实的噪声取自于正态分布。则损失函数为:
,而真实的噪声取自于正态分布。则损失函数为:

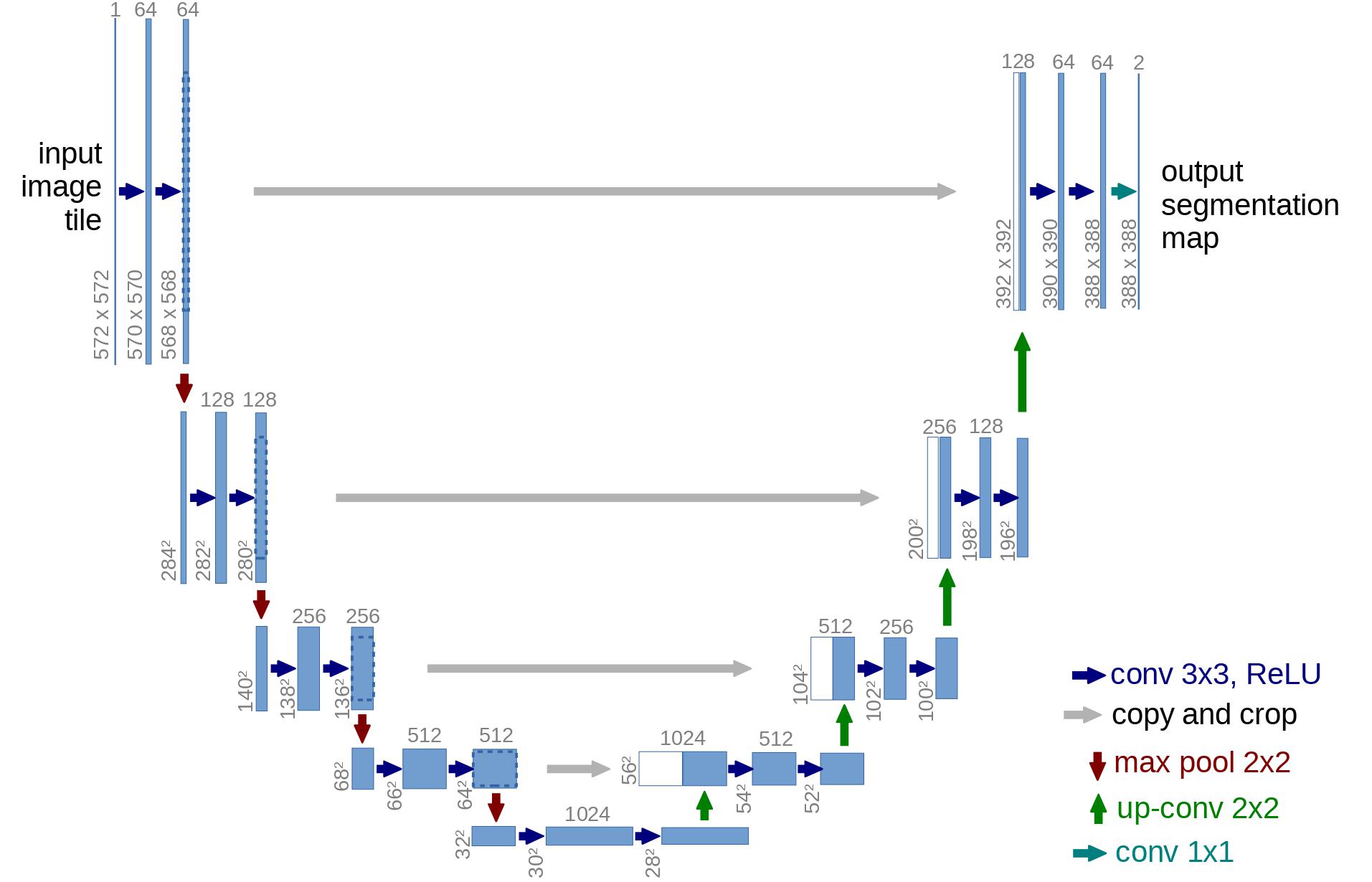
预测网络方面,DDPM采用了 U-Net。
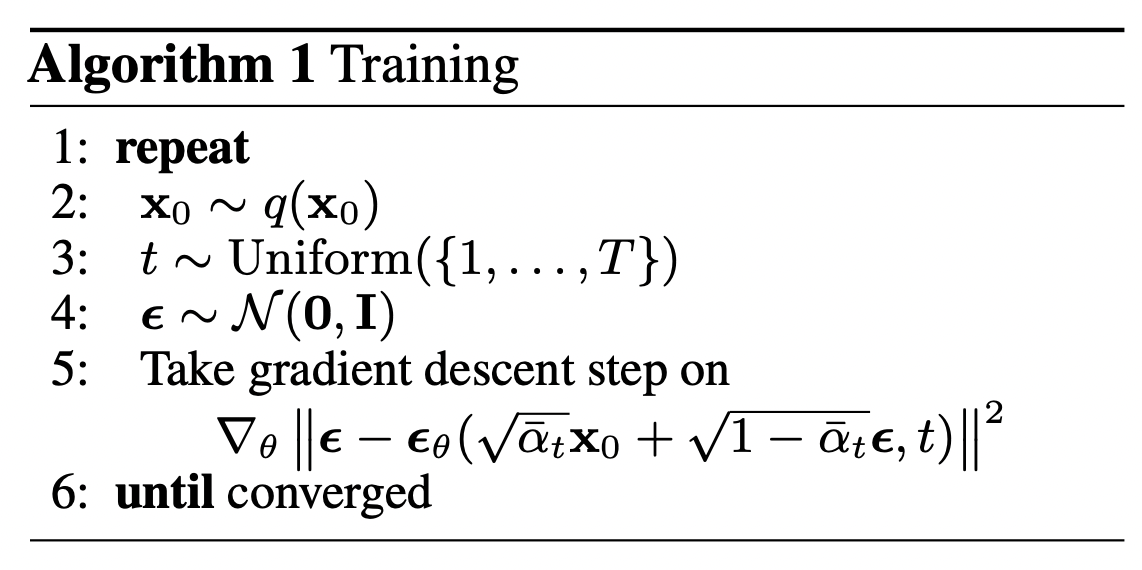
从而,网络的训练流程为:
我们接受一个随机的样本
;
我们随机从 1 到 T 采样一个 t;
我们从高斯分布采样一些噪声并且施加在输入上;
网络从被影响过后的噪声图片学习其被施加了的噪声。
代码
3.1 Network helpers
先是一些辅助函数和类。
def exists(x):return x is not None# 有val时返回val,val为None时返回d
def default(val, d):if exists(val):return valreturn d() if isfunction(d) else d# 残差模块,将输入加到输出上
class Residual(nn.Module):def __init__(self, fn):super().__init__()self.fn = fndef forward(self, x, *args, **kwargs):return self.fn(x, *args, **kwargs) + x# 上采样(反卷积)
def Upsample(dim):return nn.ConvTranspose2d(dim, dim, 4, 2, 1)# 下采样
def Downsample(dim):return nn.Conv2d(dim, dim, 4, 2, 1)3.2 Positional embeddings
类似于Transformer的positional embedding,为了让网络知道当前处理的是一系列去噪过程中的哪一个step,我们需要将步数 t 也编码并传入网络之中。DDPM采用正弦位置编码(Sinusoidal Positional Embeddings)。这一方法的输入是shape为 (batch_size, 1) 的 tensor,也就是batch中每一个sample所处的t ,并将这个tensor转换为shape为 (batch_size, dim) 的 tensor。这个tensor会被加到每一个残差模块中。
class SinusoidalPositionEmbeddings(nn.Module):def __init__(self, dim):super().__init__()self.dim = dimdef forward(self, time):device = time.devicehalf_dim = self.dim // 2embeddings = math.log(10000) / (half_dim - 1)embeddings = torch.exp(torch.arange(half_dim, device=device) * -embeddings)embeddings = time[:, None] * embeddings[None, :]embeddings = torch.cat((embeddings.sin(), embeddings.cos()), dim=-1)return embeddings3.3 ResNet/ConvNeXT block
U-Net的Block实现,可以用ResNet或ConvNeXT。
class Block(nn.Module):def __init__(self, dim, dim_out, groups = 8):super().__init__()self.proj = nn.Conv2d(dim, dim_out, 3, padding = 1)self.norm = nn.GroupNorm(groups, dim_out)self.act = nn.SiLU()def forward(self, x, scale_shift = None):x = self.proj(x)x = self.norm(x)if exists(scale_shift):scale, shift = scale_shiftx = x * (scale + 1) + shiftx = self.act(x)return xclass ResnetBlock(nn.Module):"""Deep Residual Learning for Image Recognition"""def __init__(self, dim, dim_out, *, time_emb_dim=None, groups=8):super().__init__()self.mlp = (nn.Sequential(nn.SiLU(), nn.Linear(time_emb_dim, dim_out))if exists(time_emb_dim)else None)self.block1 = Block(dim, dim_out, groups=groups)self.block2 = Block(dim_out, dim_out, groups=groups)self.res_conv = nn.Conv2d(dim, dim_out, 1) if dim != dim_out else nn.Identity()def forward(self, x, time_emb=None):h = self.block1(x)if exists(self.mlp) and exists(time_emb):time_emb = self.mlp(time_emb)h = rearrange(time_emb, "b c -> b c 1 1") + hh = self.block2(h)return h + self.res_conv(x)class ConvNextBlock(nn.Module):"""A ConvNet for the 2020s"""def __init__(self, dim, dim_out, *, time_emb_dim=None, mult=2, norm=True):super().__init__()self.mlp = (nn.Sequential(nn.GELU(), nn.Linear(time_emb_dim, dim))if exists(time_emb_dim)else None)self.ds_conv = nn.Conv2d(dim, dim, 7, padding=3, groups=dim)Get an email address at self.net. It's ad-free, reliable email that's based on your own name | self.net = nn.Sequential(nn.GroupNorm(1, dim) if norm else nn.Identity(),nn.Conv2d(dim, dim_out * mult, 3, padding=1),nn.GELU(),nn.GroupNorm(1, dim_out * mult),nn.Conv2d(dim_out * mult, dim_out, 3, padding=1),)self.res_conv = nn.Conv2d(dim, dim_out, 1) if dim != dim_out else nn.Identity()def forward(self, x, time_emb=None):h = self.ds_conv(x)if exists(self.mlp) and exists(time_emb):condition = self.mlp(time_emb)h = h + rearrange(condition, "b c -> b c 1 1")h = Get an email address at self.net. It's ad-free, reliable email that's based on your own name | self.net(h)return h + self.res_conv(x)3.4 Attention module
包含两种attention模块,一个是常规的 multi-head self-attention,一个是 linear attention variant。
class Attention(nn.Module):def __init__(self, dim, heads=4, dim_head=32):super().__init__()self.scale = dim_head**-0.5self.heads = headshidden_dim = dim_head * headsself.to_qkv = nn.Conv2d(dim, hidden_dim * 3, 1, bias=False)self.to_out = nn.Conv2d(hidden_dim, dim, 1)def forward(self, x):b, c, h, w = x.shapeqkv = self.to_qkv(x).chunk(3, dim=1)q, k, v = map(lambda t: rearrange(t, "b (h c) x y -> b h c (x y)", h=self.heads), qkv)q = q * self.scalesim = einsum("b h d i, b h d j -> b h i j", q, k)sim = sim - sim.amax(dim=-1, keepdim=True).detach()attn = sim.softmax(dim=-1)out = einsum("b h i j, b h d j -> b h i d", attn, v)out = rearrange(out, "b h (x y) d -> b (h d) x y", x=h, y=w)return self.to_out(out)class LinearAttention(nn.Module):def __init__(self, dim, heads=4, dim_head=32):super().__init__()self.scale = dim_head**-0.5self.heads = headshidden_dim = dim_head * headsself.to_qkv = nn.Conv2d(dim, hidden_dim * 3, 1, bias=False)self.to_out = nn.Sequential(nn.Conv2d(hidden_dim, dim, 1), nn.GroupNorm(1, dim))def forward(self, x):b, c, h, w = x.shapeqkv = self.to_qkv(x).chunk(3, dim=1)q, k, v = map(lambda t: rearrange(t, "b (h c) x y -> b h c (x y)", h=self.heads), qkv)q = q.softmax(dim=-2)k = k.softmax(dim=-1)q = q * self.scalecontext = torch.einsum("b h d n, b h e n -> b h d e", k, v)out = torch.einsum("b h d e, b h d n -> b h e n", context, q)out = rearrange(out, "b h c (x y) -> b (h c) x y", h=self.heads, x=h, y=w)return self.to_out(out)3.5 Group normalization
DDPM的作者对U-Net的卷积/注意力层使用GN正则化。下面,我们定义了一个PreNorm类,它将被用于在注意力层之前应用groupnorm。值得注意的是,归一化在Transformer中是在注意力之前还是之后应用,目前仍存在着争议。
class PreNorm(nn.Module):def __init__(self, dim, fn):super().__init__()self.fn = fnself.norm = nn.GroupNorm(1, dim)def forward(self, x):x = self.norm(x)return self.fn(x)3.6 Conditional U-Net
现在,我们已经定义了所有的组件,接下来就是定义完整的网络了。
输入:噪声图片的batch+这些图片各自的t。
输出:预测每个图片上所添加的噪声。
Input:a batch of noisy images of shape ( batch_size, num_channels, h, w ) and a batch of steps of shape ( batch_size, 1 )
output: a tensor of shape ( batch_size, num_channels, h, w )
具体的网络结构:
首先,输入通过一个卷积层,同时计算step t 所对应的embedding
通过一系列的下采样stage,每个stage都包含:2个ResNet/ConvNeXT blocks + groupnorm + attention + residual connection + downsample operation
在网络中间,应用一个带attention的ResNet或者ConvNeXT
通过一系列的上采样stage,每个stage都包含:2个ResNet/ConvNeXT blocks + groupnorm + attention + residual connection + upsample operation
最终,通过一个ResNet/ConvNeXT blocl和一个卷积层。
class Unet(nn.Module):def __init__(self,dim,init_dim=None,out_dim=None,dim_mults=(1, 2, 4, 8),channels=3,with_time_emb=True,resnet_block_groups=8,use_convnext=True,convnext_mult=2,):super().__init__()# determine dimensionsself.channels = channelsinit_dim = default(init_dim, dim // 3 * 2)self.init_conv = nn.Conv2d(channels, init_dim, 7, padding=3)dims = [init_dim, *map(lambda m: dim * m, dim_mults)]in_out = list(zip(dims[:-1], dims[1:]))if use_convnext:block_klass = partial(ConvNextBlock, mult=convnext_mult)else:block_klass = partial(ResnetBlock, groups=resnet_block_groups)# time embeddingsif with_time_emb:time_dim = dim * 4self.time_mlp = nn.Sequential(SinusoidalPositionEmbeddings(dim),nn.Linear(dim, time_dim),nn.GELU(),nn.Linear(time_dim, time_dim),)else:time_dim = Noneself.time_mlp = None# layersself.downs = nn.ModuleList([])self.ups = nn.ModuleList([])num_resolutions = len(in_out)for ind, (dim_in, dim_out) in enumerate(in_out):is_last = ind >= (num_resolutions - 1)self.downs.append(nn.ModuleList([block_klass(dim_in, dim_out, time_emb_dim=time_dim),block_klass(dim_out, dim_out, time_emb_dim=time_dim),Residual(PreNorm(dim_out, LinearAttention(dim_out))),Downsample(dim_out) if not is_last else nn.Identity(),]))mid_dim = dims[-1]self.mid_block1 = block_klass(mid_dim, mid_dim, time_emb_dim=time_dim)self.mid_attn = Residual(PreNorm(mid_dim, Attention(mid_dim)))self.mid_block2 = block_klass(mid_dim, mid_dim, time_emb_dim=time_dim)for ind, (dim_in, dim_out) in enumerate(reversed(in_out[1:])):is_last = ind >= (num_resolutions - 1)self.ups.append(nn.ModuleList([block_klass(dim_out * 2, dim_in, time_emb_dim=time_dim),block_klass(dim_in, dim_in, time_emb_dim=time_dim),Residual(PreNorm(dim_in, LinearAttention(dim_in))),Upsample(dim_in) if not is_last else nn.Identity(),]))out_dim = default(out_dim, channels)self.final_conv = nn.Sequential(block_klass(dim, dim), nn.Conv2d(dim, out_dim, 1))def forward(self, x, time):x = self.init_conv(x)t = self.time_mlp(time) if exists(self.time_mlp) else Noneh = []# downsamplefor block1, block2, attn, downsample in self.downs:x = block1(x, t)x = block2(x, t)x = attn(x)h.append(x)x = downsample(x)# bottleneckx = self.mid_block1(x, t)x = self.mid_attn(x)x = self.mid_block2(x, t)# upsamplefor block1, block2, attn, upsample in self.ups:x = torch.cat((x, h.pop()), dim=1)x = block1(x, t)x = block2(x, t)x = attn(x)x = upsample(x)return self.final_conv(x)3.7 定义前向扩散过程
DDPM中使用linear schedule定义 。后续的研究指出使用cosine schedule可能会有更好的效果。
接下来是一些简单的对于 schedule 的定义,从当中选一个使用即可。
def cosine_beta_schedule(timesteps, s=0.008):"""cosine schedule as proposed in https://arxiv.org/abs/2102.09672"""steps = timesteps + 1x = torch.linspace(0, timesteps, steps)alphas_cumprod = torch.cos(((x / timesteps) + s) / (1 + s) * torch.pi * 0.5) ** 2alphas_cumprod = alphas_cumprod / alphas_cumprod[0]betas = 1 - (alphas_cumprod[1:] / alphas_cumprod[:-1])return torch.clip(betas, 0.0001, 0.9999)def linear_beta_schedule(timesteps):beta_start = 0.0001beta_end = 0.02return torch.linspace(beta_start, beta_end, timesteps)def quadratic_beta_schedule(timesteps):beta_start = 0.0001beta_end = 0.02return torch.linspace(beta_start**0.5, beta_end**0.5, timesteps) ** 2def sigmoid_beta_schedule(timesteps):beta_start = 0.0001beta_end = 0.02betas = torch.linspace(-6, 6, timesteps)return torch.sigmoid(betas) * (beta_end - beta_start) + beta_start
我们按照DDPM中用第二种的linear,将 T 设置为200,并将每个 t 下的各种参数提前计算好。
timesteps = 200# define beta schedule
betas = linear_beta_schedule(timesteps=timesteps)# define alphas
alphas = 1. - betas
alphas_cumprod = torch.cumprod(alphas, axis=0)
alphas_cumprod_prev = F.pad(alphas_cumprod[:-1], (1, 0), value=1.0)
sqrt_recip_alphas = torch.sqrt(1.0 / alphas)# calculations for diffusion q(x_t | x_{t-1}) and others
sqrt_alphas_cumprod = torch.sqrt(alphas_cumprod)
sqrt_one_minus_alphas_cumprod = torch.sqrt(1. - alphas_cumprod)# calculations for posterior q(x_{t-1} | x_t, x_0)
posterior_variance = betas * (1. - alphas_cumprod_prev) / (1. - alphas_cumprod)def extract(a, t, x_shape):batch_size = t.shape[0]out = a.gather(-1, t.cpu())return out.reshape(batch_size, *((1,) * (len(x_shape) - 1))).to(t.device)我们用一个实例来说明前向加噪过程。
from PIL import Image
import requestsurl = 'http://images.cocodataset.org/val2017/000000039769.jpg'
image = Image.open(requests.get(url, stream=True).raw)
image
from torchvision.transforms import Compose, ToTensor, Lambda, ToPILImage, CenterCrop, Resizeimage_size = 128
transform = Compose([Resize(image_size),CenterCrop(image_size),ToTensor(), # turn into Numpy array of shape HWC, divide by 255Lambda(lambda t: (t * 2) - 1),
])x_start = transform(image).unsqueeze(0)
x_start.shape # 输出的结果是 torch.Size([1, 3, 128, 128])import numpy as npreverse_transform = Compose([Lambda(lambda t: (t + 1) / 2),Lambda(lambda t: t.permute(1, 2, 0)), # CHW to HWCLambda(lambda t: t * 255.),Lambda(lambda t: t.numpy().astype(np.uint8)),ToPILImage(),
])准备齐全,接下来就可以定义正向扩散过程了。
# forward diffusion (using the nice property)
def q_sample(x_start, t, noise=None):if noise is None:noise = torch.randn_like(x_start)sqrt_alphas_cumprod_t = extract(sqrt_alphas_cumprod, t, x_start.shape)sqrt_one_minus_alphas_cumprod_t = extract(sqrt_one_minus_alphas_cumprod, t, x_start.shape)return sqrt_alphas_cumprod_t * x_start + sqrt_one_minus_alphas_cumprod_t * noisedef get_noisy_image(x_start, t):# add noisex_noisy = q_sample(x_start, t=t)# turn back into PIL imagenoisy_image = reverse_transform(x_noisy.squeeze())return noisy_image可视化一下多个不同t的生成结果。
import matplotlib.pyplot as plt# use seed for reproducability
torch.manual_seed(0)# source: https://pytorch.org/vision/stable/auto_examples/plot_transforms.html#sphx-glr-auto-examples-plot-transforms-py
def plot(imgs, with_orig=False, row_title=None, **imshow_kwargs):if not isinstance(imgs[0], list):# Make a 2d grid even if there's just 1 rowimgs = [imgs]num_rows = len(imgs)num_cols = len(imgs[0]) + with_origfig, axs = plt.subplots(figsize=(200,200), nrows=num_rows, ncols=num_cols, squeeze=False)for row_idx, row in enumerate(imgs):row = [image] + row if with_orig else rowfor col_idx, img in enumerate(row):ax = axs[row_idx, col_idx]ax.imshow(np.asarray(img), **imshow_kwargs)ax.set(xticklabels=[], yticklabels=[], xticks=[], yticks=[])if with_orig:axs[0, 0].set(title='Original image')axs[0, 0].title.set_size(8)if row_title is not None:for row_idx in range(num_rows):axs[row_idx, 0].set(ylabel=row_title[row_idx])plt.tight_layout()plot([get_noisy_image(x_start, torch.tensor([t])) for t in [0, 50, 100, 150, 199]])
3.8 定义损失函数
def p_losses(denoise_model, x_start, t, noise=None, loss_type="l1"):# 先采样噪声if noise is None:noise = torch.randn_like(x_start)# 用采样得到的噪声去加噪图片x_noisy = q_sample(x_start=x_start, t=t, noise=noise)predicted_noise = denoise_model(x_noisy, t)# 根据加噪了的图片去预测采样的噪声if loss_type == 'l1':loss = F.l1_loss(noise, predicted_noise)elif loss_type == 'l2':loss = F.mse_loss(noise, predicted_noise)elif loss_type == "huber":loss = F.smooth_l1_loss(noise, predicted_noise)else:raise NotImplementedError()return loss3.9 定义数据集 PyTorch Dataset 和 DataLoader
我们使用mnist数据集构造了一个 DataLoader,每个batch由128张 normalize 过的 image 组成。
from datasets import load_dataset# load dataset from the hub
dataset = load_dataset("fashion_mnist")
image_size = 28
channels = 1
batch_size = 128from torchvision import transforms
from torch.utils.data import DataLoadertransform = Compose([transforms.RandomHorizontalFlip(),transforms.ToTensor(),transforms.Lambda(lambda t: (t * 2) - 1)
])def transforms(examples):examples["pixel_values"] = [transform(image.convert("L")) for image in examples["image"]]del examples["image"]return examplestransformed_dataset = dataset.with_transform(transforms).remove_columns("label")
dataloader = DataLoader(transformed_dataset["train"], batch_size=batch_size, shuffle=True)
batch = next(iter(dataloader))
print(batch.keys()) # dict_keys(['pixel_values'])3.10 采样
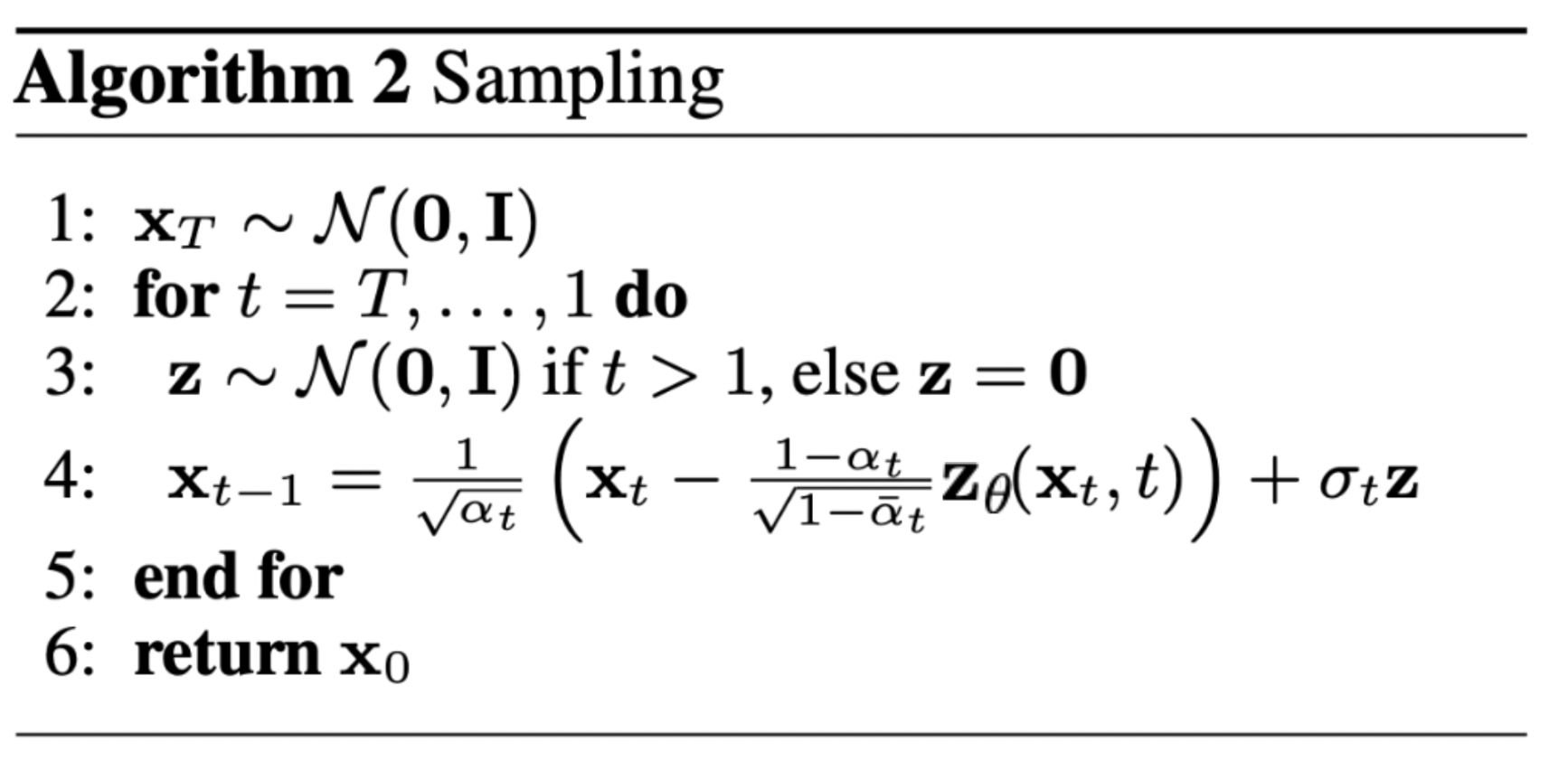
采样过程发生在反向去噪时。对于一张纯噪声,扩散模型一步步地去除噪声最终得到真实图片,采样事实上就是定义的去除噪声这一行为。 观察采样算法中第四行, t−1 步的图片是由 t 步的图片减去一个噪声得到的,只不过这个噪声是由网络拟合出来,并且 rescale 过的而已。 这里要注意第四行式子的最后一项,采样时每一步也都会加上一个从正态分布采样的纯噪声。理想情况下,最终我们会得到一张看起来像是从真实数据分布中采样得到的图片。
@torch.no_grad()
def p_sample(model, x, t, t_index):betas_t = extract(betas, t, x.shape)sqrt_one_minus_alphas_cumprod_t = extract(sqrt_one_minus_alphas_cumprod, t, x.shape)sqrt_recip_alphas_t = extract(sqrt_recip_alphas, t, x.shape)# Equation 11 in the paper# Use our model (noise predictor) to predict the meanmodel_mean = sqrt_recip_alphas_t * (x - betas_t * model(x, t) / sqrt_one_minus_alphas_cumprod_t)if t_index == 0:return model_meanelse:posterior_variance_t = extract(posterior_variance, t, x.shape)noise = torch.randn_like(x)# Algorithm 2 line 4:return model_mean + torch.sqrt(posterior_variance_t) * noise # Algorithm 2 (including returning all images)
@torch.no_grad()
def p_sample_loop(model, shape):device = next(model.parameters()).deviceb = shape[0]# start from pure noise (for each example in the batch)img = torch.randn(shape, device=device)imgs = []for i in tqdm(reversed(range(0, timesteps)), desc='sampling loop time step', total=timesteps):img = p_sample(model, img, torch.full((b,), i, device=device, dtype=torch.long), i)imgs.append(img.cpu().numpy())return imgs@torch.no_grad()
def sample(model, image_size, batch_size=16, channels=3):return p_sample_loop(model, shape=(batch_size, channels, image_size, image_size))3.11 训练
先定义一些辅助生成图片的函数。
from pathlib import Pathdef num_to_groups(num, divisor):groups = num // divisorremainder = num % divisorarr = [divisor] * groupsif remainder > 0:arr.append(remainder)return arrresults_folder = Path("./results")
results_folder.mkdir(exist_ok = True)
save_and_sample_every = 1000接下来实例化模型。
from torch.optim import Adamdevice = "cuda" if torch.cuda.is_available() else "cpu"model = Unet(dim=image_size,channels=channels,dim_mults=(1, 2, 4,)
)
model.to(device)optimizer = Adam(model.parameters(), lr=1e-3)开始训练!
from torchvision.utils import save_imageepochs = 6for epoch in range(epochs):for step, batch in enumerate(dataloader):optimizer.zero_grad()batch_size = batch["pixel_values"].shape[0]batch = batch["pixel_values"].to(device)# Algorithm 1 line 3: sample t uniformally for every example in the batcht = torch.randint(0, timesteps, (batch_size,), device=device).long()loss = p_losses(model, batch, t, loss_type="huber")if step % 100 == 0:print("Loss:", loss.item())loss.backward()optimizer.step()# save generated imagesif step != 0 and step % save_and_sample_every == 0:milestone = step // save_and_sample_everybatches = num_to_groups(4, batch_size)all_images_list = list(map(lambda n: sample(model, batch_size=n, channels=channels), batches))all_images = torch.cat(all_images_list, dim=0)all_images = (all_images + 1) * 0.5save_image(all_images, str(results_folder / f'sample-{milestone}.png'), nrow = 6)Inference:
# sample 64 images
samples = sample(model, image_size=image_size, batch_size=64, channels=channels)# show a random one
random_index = 5
plt.imshow(samples[-1][random_index].reshape(image_size, image_size, channels), cmap="gray")
import matplotlib.animation as animationrandom_index = 53fig = plt.figure()
ims = []
for i in range(timesteps):im = plt.imshow(samples[i][random_index].reshape(image_size, image_size, channels), cmap="gray", animated=True)ims.append([im])animate = animation.ArtistAnimation(fig, ims, interval=50, blit=True, repeat_delay=1000)
animate.save('diffusion.gif')
plt.show()
4. 参考文献
原理+代码:Diffusion Model 直观理解
The Annotated Diffusion Model
【diffusion】扩散模型详解!理论+代码