AGV是自动导引运输车,装备采用电磁或光学等自动导引装置,能够沿规定的导引路径行驶,具有安全保护以及各种移载功能的运输车。其导航方式主要分磁条|磁钉导航、激光导航、激光反光板、激光自然导航、二维码导航、惯性导航等方式,广泛应用于机械、电子、化工、冶金、邮电、汽车、机场、码头、造纸、烟草、家电、医药、食品、商业、银行、出版印刷、国防等行业。
本文主要重点介绍AGV基本概念及导航分类与差异。
一、AGV基本概念
AGV是自动导引运输车(Automated Guided Vehicle) 的英文缩写。是指装备有电磁或光学等自动导引装置,能够沿规定的导引路径行驶,具有安全保护以及各种移载功能的运输车。
AGV发展到现阶段,可延伸出AMR(Autonomous Mobile Robot),即自主移动机器人,与AGV进行场景互补,不过目前都可称为AGV。
AGV属于机器人吗?----AGV属于轮式移动机器人的特殊应用。
AGV可广泛应用于机械、电子、化工、冶金、邮电、汽车、机场、码头、造纸、烟草、家电、医药、食品、商业、银行、出版印刷、国防等行业。

二、AGV应用
AGV在各种行业可以延伸出各种应用
1,仓储搬运
2,安防巡检
3,高危环境作业
4,物流配送
5,农业畜牧
6,高空建筑
7,柔性生产
8,医疗消毒
9,港口码头

三、AGV各种形态


四、AGV市场特点
1,AGV是机器人行业唯一一个整机国产化占有率超过90%的细分市场,也是国产化AGV机器人企业完全有主导权、让国外品牌倍感压力的一个市场。
2,AGV主要核心部件基本处于发展阶段,核心部件国产化比例仍较低,如PLC、激光扫描传感器、伺服控制、相机、陀螺仪等,目前大部分客户仍先首选国外品牌。但随着近年发展,支持核心部件国产化呼声逐渐升高。绝大多数整机制造企业都希望有相关国产化的优质产品实现替代。
五、AGV主要导航方式
AGV导航方式有多种

AGV磁条导航
1,AGV是靠磁导航发展起来的,目前该导航方式已经增长缓慢,但市场需求量还是非常大。
2,利用检测磁条与磁导航传感器相对位置来进行位置纠偏,一般是通过控制轮子速度差或者是舵角来让磁条时刻处于磁导航中间位置,得以保持沿着磁条轨道一直运行。

1、AGV激光导航
1,AGV激光导航是未来主要导航方式之一,目前处于火热的发展阶段。
2,激光导航分为激光反光板导航和激光自然导航(激光SLAM导航)
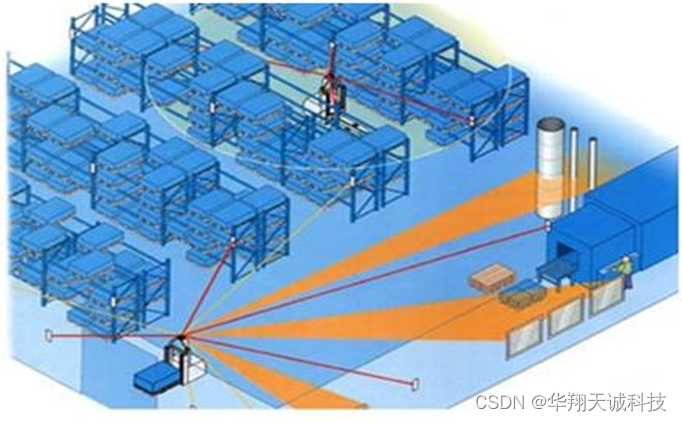
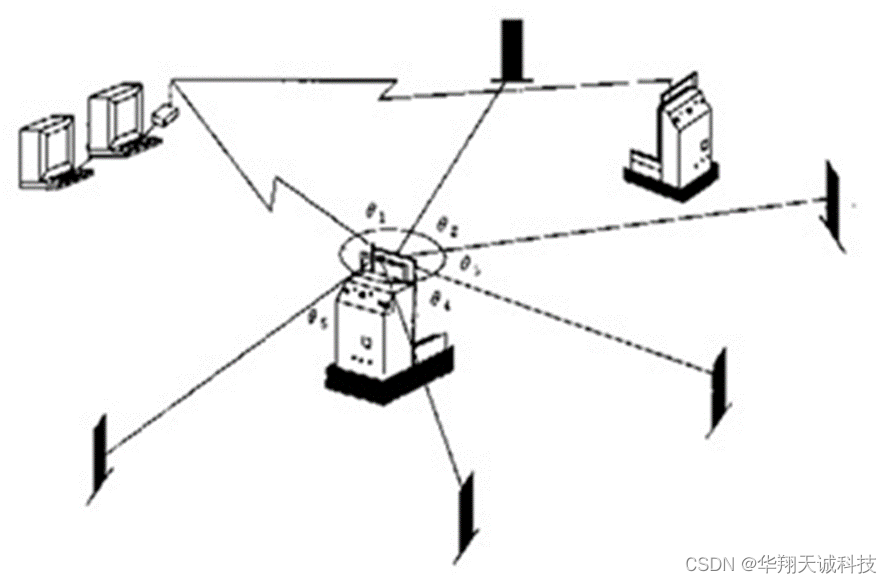
2、AGV激光反光板导航
激光反光板导航利用同一时间内检测到至少3块反光标记板,通过三角函数列出方程组得到坐标和航向角。
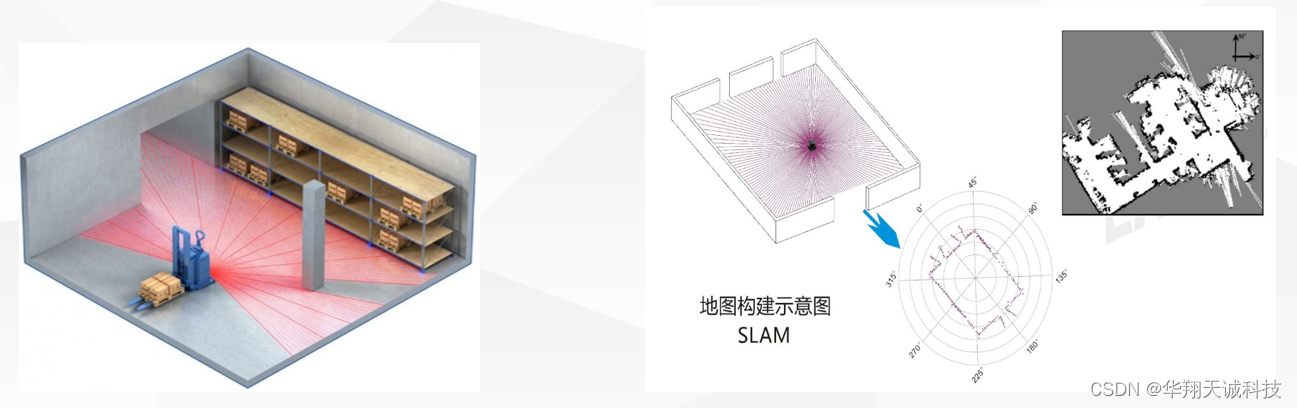
3、AGV激光自然导航
激光自然导航又叫SLAM导航,SLAM(simultaneous localization and mapping)实时定位与建图。
激光SLAM导航采用2D或3D激光雷达(也叫单线或多线激光雷达),激光雷达采集到的物体信息呈现出一系列分散的、具有准确角度和距离信息的点,被称为点云数据。通常,激光SLAM算法通过对不同时刻两片点云数据进行的匹配与比对,计算激光雷达相对运动的距离和姿态的改变,也就完成了对机器人自身的定位,得出当前的坐标和角度。
4、AGV二维码导航
1,目前二维码导航的AGV出货量非常大,几乎都是仓储型AGV使用的导航方式。
2,在地面或者天花板等位置标贴二维码作为标记点。通过扫描读取二维码信息和二维码相对相机的角度来确定当前位置。

5、AGV惯性导航
1,AGV惯性导航简称为惯导,目前相对应用较少且大多数是室外运行时采用。
2,核心部件:陀螺仪、编码器、磁钉传感器。
3,原理:陀螺仪检测出当前的航向角和角速度及加速度等数据,在运行路径上按一定的距离铺设磁钉,通过间隔性读磁钉位置来进行路径校正。编码器辅助测量位置信息。
部分图片来源于网络,如有侵权请告知删除!