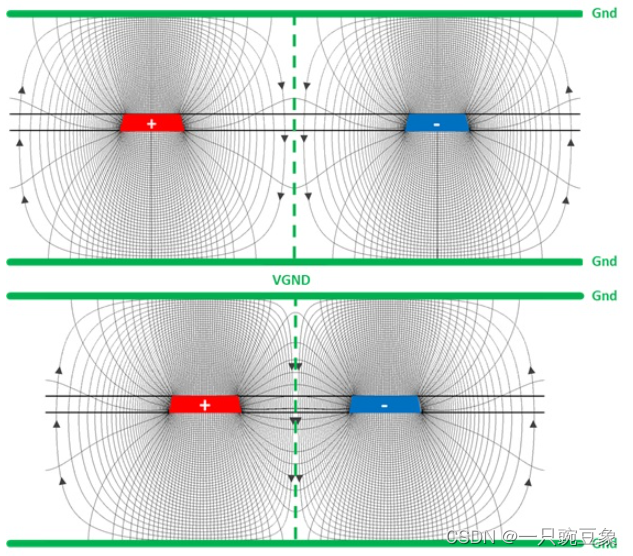
差分对的主要目的是为了保持正确的差分阻抗,因此,必须了解差分阻抗的含义,差分阻抗是每条走线奇模阻抗的两倍,而每条走线的单端阻抗(SE, single-ended),仅当差分线内没有对内耦合时,才等于奇模阻抗,因此,当两根走线更加靠近彼此时,差分阻抗会降低,此时就需要通过调整线宽对其进行补偿。 如下图所示,展示了一对边缘耦合的带状走线,上图展示了一对松散耦合状态下(线间距=3.5*线宽)的走线电磁场分布,下图展示了一对紧密耦合状态下(线间距=1.5*线宽)的走线电磁场分布,红色代表流入页面的电流方向,蓝色代表流出页面的电流方向,并且,环绕走线的圆曲线代表磁场,而电场则垂直于磁场。 可以观察到,当走线松散耦合时,每条走线周围的电场线和磁场线几乎是对称的,并且,大多数电场与上下的参考面耦合,而当走线彼此靠近形成紧密耦合时,线间的磁场线被压缩,电场线则更多地倾向于相互耦合,由于电磁场的相互作用的增强,就好像线之间形成了一个参考面。
奇模(Odd-Mode)阻抗
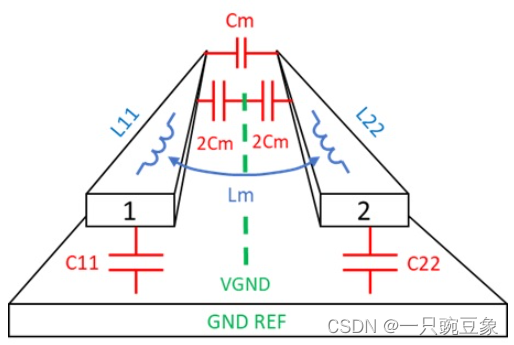
如下图所示,一对等宽的微带线模型,当考虑单独驱动1号线时,产生了单端特性阻抗Z0,它由相对于参考地平面的自环路电感L11和自电容C11组成,当考虑差分驱动1和2号线时,传播模态变为了奇模,将会产生如前一张图所示的电磁场相互耦合作用,并且由互感Lm和互容Cm进行耦合描述。
在二维场求解器中,就可以利用上述参数,建立如下的LC矩阵:
LC矩阵可以用来确定奇模阻抗,它可以用下面的等式来计算:

举例说明各个参数之间的关系:
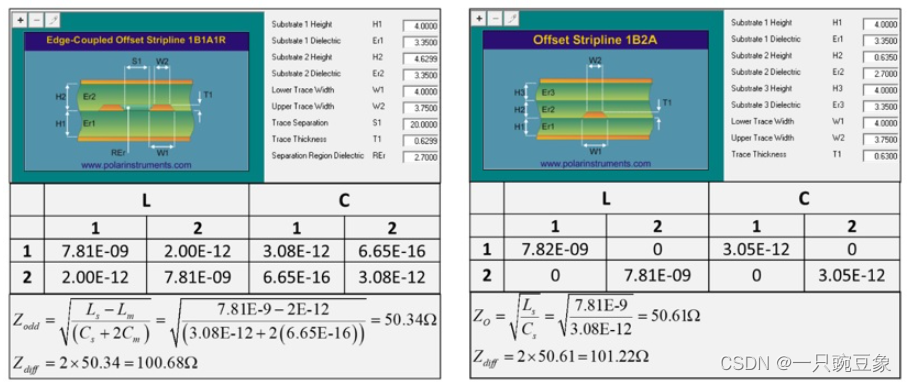
使用Polar SI9000二维场求解器比较了具有W1=4 mil走线、间隔S1=20 mil空间的松散耦合差分(Loose)对与具有相同介电厚度的SE传输线,LC矩阵在10GHz频带提取,从结果上可以看出,松耦合对的奇模阻抗等于SE走线的特性阻抗,因此差分阻抗是相同的,因为此时的互感和互容值都特别地小,几乎可以等同于零。
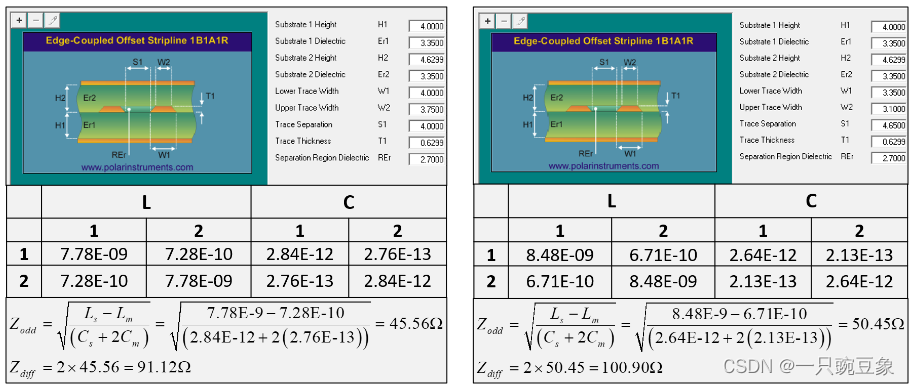
但是,如果布线一对紧密耦合的走线,则相同走线宽度下的奇模阻抗小于SE阻抗,如下图的左侧(Tight1),H1-W1-S1为4-4-4mil几何结构的差分阻抗为91欧姆,因为此时的互感和互容值都增大了,根据公式,会导致Zodd的减小;为了保持100欧姆差分阻抗,如下图的右侧(Tight2),线宽W1必须减少到3.35mil,线间距S1增大到4.65mil,以此弱化互感和互容的影响。
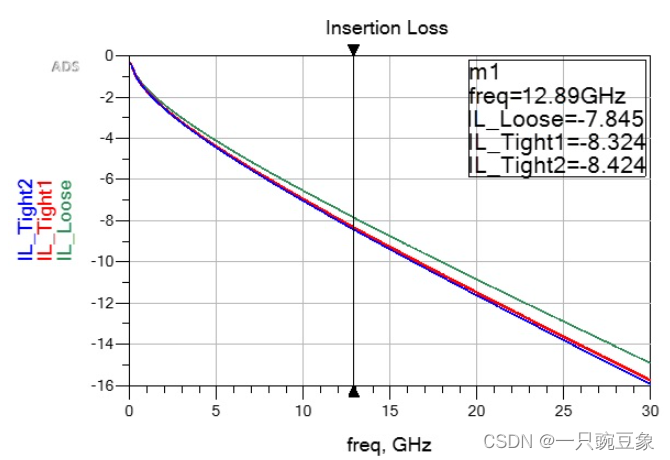
在实际设计中,不仅要保持差分阻抗的稳定,插入损耗指标同样非常重要,因为线宽减小和耦合更紧密同样会导致长距离通道上的损耗更高,使用上述的三种差分阻抗参数(Losse/Tight1/Tight2),绘制了三个差分对的插入损耗曲线,其中,松耦合以绿色显示,不调整线宽的紧密耦合 (Tight1) 显示为红色,而线宽调节后的紧密耦合 (Tight2) 显示为蓝色,如图中标记所示,在12.89 GHz处,松耦合具有明显更低的插损效果,而Tight1 和 Tight2 之间只有 0.1 dB 的差别,这就说明无论是否调整线宽以满足差分阻抗,紧密耦合都会降低插损效果。
综上所述,差分对是紧密耦合还是松散耦合并不重要,如果设计得当,两者都可以设计为正确匹配驱动器阻抗,其差别在于,更紧密的耦合可以提供更好的布线密度,但代价是更高的插入损耗,而松耦合可以更轻松地减少插入损耗,无论最终决定采用哪种设计,都必须针对差分阻抗进行仿真和测量,并且,由于互耦参数的存在,不能通过测量SE阻抗来确定差分阻抗。
参考文档:
What is Differential Impedance and Why do We Care? Bert Simonovich