导 读
本文主要介绍如何使用YOLOv8+BYTETrack+OpenCV实现车辆速度的计算(详细步骤 + 代码)。
前 言
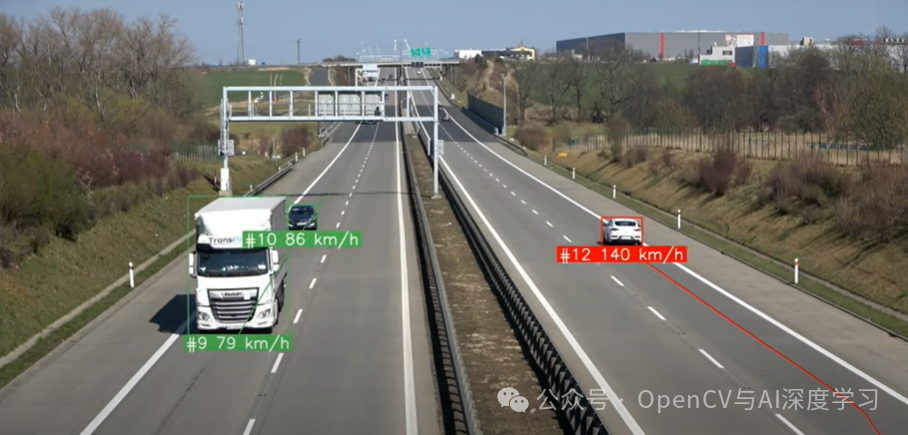
您是否想过如何使用计算机视觉来估计车辆的速度?在本教程中,我们将探索从对象检测到跟踪再到速度估计的整个过程。
本文的实现主要包含以下三个主要步骤,分别是对象检测、对象跟踪和速度估计,下面我们将一一介绍其实现步骤。
车辆检测
要对视频执行对象检测,我们需要迭代视频的帧,然后对每个帧运行我们的检测模型。推理则提供对预先训练的对象检测模型的访问,我们使用yolov8x-640模型。相关代码和文档可参考链接:
https://github.com/roboflow/inference?ref=blog.roboflow.comhttps://inference.roboflow.com/?ref=blog.roboflow.com
import supervision as svfrom inference.models.utils import get_roboflow_modelmodel = get_roboflow_model(‘yolov8x-640’)frame_generator