BetaFlight开源飞控源码分析
- 1.整体框架
- 2.主函数源码分析
- 2.1.初始化
- 2.2.运行
- 3.如何使用这个程序
- 3.1.目标文件源码分析
- 3.2.添加目标文件
- 3.3.编译程序
- 4.参考文献
betaflight github开源地址:https://github.com/betaflight/betaflight.git
BetaFlight是穿越机领域比较成熟的开源飞控,需要注意的是BetaFlight官网只是提供开源软件工程,用户需要根据这套程序,结合自己的硬件,自行修改相关驱动代码。
本文主要是分析BetaFlight源码框架,然后基于这个框架做修改,生成自己硬件对应的程序固件。
1.整体框架
这里以4.4版本的程序为例。
程序克隆下来之后,使用VScode打开文件夹,下面是一级目录的介绍
 下面在linux终端上使用命令
下面在linux终端上使用命令
sudo apt install tree
tree -a
tree命令可以以树状图列出文件目录结构:
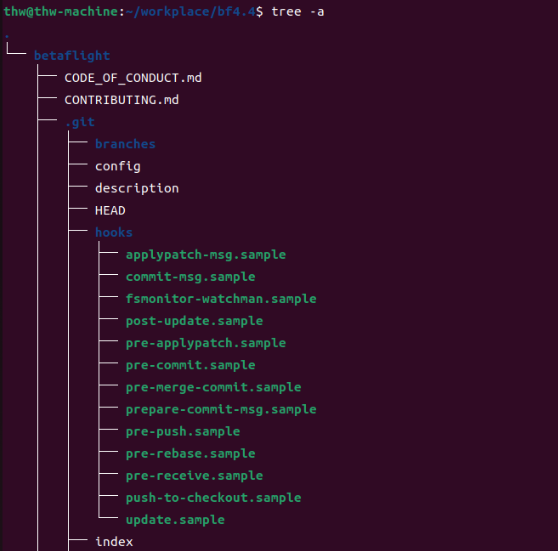
可以看到整个程序目录分支众多,还是比较庞大的。
betaflight├──> src/main //源代码&引用头文件目录│ ├──> main.c //C代码入口main()│ ├──> ... //省略很多模块,后续会深入分析,比如:blackbox,osd等│ ├──> drivers //各类硬件芯片驱动│ ├──> target //各类目标板(airframe):代码+配置│ │ └──> STM32F405 //举例:STM32F405│ │ ├──> target.c│ │ ├──> target.h│ │ └──> target.mk│ └──> startup│ └──> startup_stm32f745xx.s├──> obj //编译目标文件目录│ ├──> main│ └──> betaflight_4.4.0_STM32F405.hex├──> lib/main //库代码目录│ ├──> MAVLink│ ├──> CMSIS│ ├──> STM32_USB-FS-Device_Driver│ ├──> FatFS│ └──> STM32F7├──> src/link //链接脚本目录│ ├──> stm32_flash_f7_split.ld│ └──> stm32_flash_f74x.ld├──> make //通用makefile目录├──> tools //本地工具安装,比如:gcc-arm-none-eabi-9-2020-q2-update└──> downloads //下载目录,比如:下载的工具链压缩包gcc-arm-none-eabi-9-2020-q2-update-x86_64-linux.tar.bz2
2.主函数源码分析
src是整个代码的核心文件夹,打开betaflight\src\main\main.c,可以看到betaflight是用C语言开发的一款飞控项目,其入口也是从main()函数开始。
main├──> init() //硬件初始化└──> run() //任务循环运行
整体上分为两部分:初始化和运行。
2.1.初始化
init├──> <SERIAL_PORT_COUNT> printfSerialInit├──> systemInit├──> tasksInitData├──> IOInitGlobal├──> <USE_HARDWARE_REVISION_DETECTION> detectHardwareRevision├──> <USE_TARGET_CONFIG> targetConfiguration├──> pgResetAll├──> <USE_SDCARD_SPI> configureSPIBusses(); initFlags |= SPI_BUSSES_INIT_ATTEMPTED;├──> sdCardAndFSInit; initFlags |= SD_INIT_ATTEMPTED;├──> <!sdcard_isInserted()> failureMode(FAILURE_SDCARD_REQUIRED)├──> [SD Card FS check] //while (afatfs_getFilesystemState() != AFATFS_FILESYSTEM_STATE_READY)│ ├──> afatfs_poll()│ └──> <afatfs_getFilesystemState() == AFATFS_FILESYSTEM_STATE_FATAL> failureMode(FAILURE_SDCARD_INITIALISATION_FAILED)├──> <CONFIG_IN_EXTERNAL_FLASH> || <CONFIG_IN_MEMORY_MAPPED_FLASH)>│ ├──> pgResetAll()│ ├──> <CONFIG_IN_EXTERNAL_FLASH> configureSPIBusses(); initFlags |= SPI_BUSSES_INIT_ATTEMPTED;│ ├──> configureQuadSPIBusses();configureOctoSPIBusses();initFlags |= QUAD_OCTO_SPI_BUSSES_INIT_ATTEMPTED;│ ├──> bool haveFlash = flashInit(flashConfig());│ ├──> <!haveFlash>failureMode(FAILURE_EXTERNAL_FLASH_INIT_FAILED)│ └──> initFlags |= FLASH_INIT_ATTEMPTED├──> initEEPROM├──> ensureEEPROMStructureIsValid├──> bool readSuccess = readEEPROM()├──> <USE_BOARD_INFO> initBoardInformation├──> <!readSuccess || !isEEPROMVersionValid() || strncasecmp(systemConfig()->boardIdentifier, TARGET_BOARD_IDENTIFIER, sizeof(TARGET_BOARD_IDENTIFIER))> resetEEPROM()├──> systemState |= SYSTEM_STATE_CONFIG_LOADED├──> <USE_DEBUG_PIN> dbgPinInit├──> debugMode = systemConfig()->debug_mode├──> <TARGET_PREINIT> targetPreInit├──> <!defined(USE_VIRTUAL_LED)> ledInit(statusLedConfig())├──> <!defined(SIMULATOR_BUILD)> EXTIInit├──> <USE_BUTTONS>│ ├──> buttonsInit│ └──> <EEPROM_RESET_PRECONDITION && defined(BUTTON_A_PIN) && defined(BUTTON_B_PIN)> //#define EEPROM_RESET_PRECONDITION (!isMPUSoftReset())│ └──> resetEEPROM/systemReset├──> <defined(STM32F4) || defined(STM32G4)> // F4 has non-8MHz boards, G4 for Betaflight allow 24 or 27MHz oscillator│ └──> systemClockSetHSEValue(systemConfig()->hseMhz * 1000000U)├──> <USE_OVERCLOCK> OverclockRebootIfNecessary(systemConfig()->cpu_overclock)├──> <USE_MCO>│ ├──> <defined(STM32F4) || defined(STM32F7)>│ │ └──> mcoConfigure(MCODEV_2, mcoConfig(MCODEV_2));│ └──> <defined(STM32G4)>│ └──> mcoConfigure(MCODEV_1, mcoConfig(MCODEV_1));├──> <USE_TIMER> timerInit├──> <BUS_SWITCH_PIN> busSwitchInit├──> <defined(USE_UART) && !defined(SIMULATOR_BUILD)> uartPinConfigure(serialPinConfig())├──> [serialInit]│ ├──> <AVOID_UART1_FOR_PWM_PPM> serialInit(featureIsEnabled(FEATURE_SOFTSERIAL), featureIsEnabled(FEATURE_RX_PPM) || featureIsEnabled(FEATURE_RX_PARALLEL_PWM) ? SERIAL_PORT_USART1 : SERIAL_PORT_NONE);│ ├──> <AVOID_UART2_FOR_PWM_PPM> serialInit(featureIsEnabled(FEATURE_SOFTSERIAL), featureIsEnabled(FEATURE_RX_PPM) || featureIsEnabled(FEATURE_RX_PARALLEL_PWM) ? SERIAL_PORT_USART2 : SERIAL_PORT_NONE);│ ├──> <AVOID_UART3_FOR_PWM_PPM> serialInit(featureIsEnabled(FEATURE_SOFTSERIAL), featureIsEnabled(FEATURE_RX_PPM) || featureIsEnabled(FEATURE_RX_PARALLEL_PWM) ? SERIAL_PORT_USART3 : SERIAL_PORT_NONE);│ └──> <else> serialInit(featureIsEnabled(FEATURE_SOFTSERIAL), SERIAL_PORT_NONE)├──> mixerInit(mixerConfig()->mixerMode)├──> uint16_t idlePulse = motorConfig()->mincommand├──> <featureIsEnabled(FEATURE_3D)> idlePulse = flight3DConfig()->neutral3d├──> <motorConfig()->dev.motorPwmProtocol == PWM_TYPE_BRUSHED> idlePulse = 0; // brushed motors├──> <USE_MOTOR> motorDevInit(&motorConfig()->dev, idlePulse, getMotorCount()); systemState |= SYSTEM_STATE_MOTORS_READY├──> <USE_RX_PPM> <featureIsEnabled(FEATURE_RX_PARALLEL_PWM)> pwmRxInit(pwmConfig())├──> <USE_BEEPER> beeperInit(beeperDevConfig())├──> <defined(USE_INVERTER) && !defined(SIMULATOR_BUILD)> initInverters(serialPinConfig())├──> [Hardware Bus Initialization]│ ├──> <TARGET_BUS_INIT> targetBusInit()│ └──> <else> │ ├──> <!(initFlags & SPI_BUSSES_INIT_ATTEMPTED)> configureSPIBusses();initFlags |= SPI_BUSSES_INIT_ATTEMPTED;│ ├──> <!(initFlags & QUAD_OCTO_SPI_BUSSES_INIT_ATTEMPTED)> configureQuadSPIBusses();configureOctoSPIBusses();initFlags |= QUAD_OCTO_SPI_BUSSES_INIT_ATTEMPTED;│ ├──> <defined(USE_SDCARD_SDIO) && !defined(CONFIG_IN_SDCARD) && defined(STM32H7)> sdioPinConfigure(); SDIO_GPIO_Init();│ ├──> <USE_USB_MSC>│ │ ├──> mscInit()│ │ └──> <USE_SDCARD> <blackboxConfig()->device == BLACKBOX_DEVICE_SDCARD> <sdcardConfig()->mode> <!(initFlags & SD_INIT_ATTEMPTED)> sdCardAndFSInit();initFlags |= SD_INIT_ATTEMPTED;│ ├──> <USE_FLASHFS> <blackboxConfig()->device == BLACKBOX_DEVICE_FLASH> emfat_init_files│ ├──> <USE_SPI> spiInitBusDMA│ ├──> <mscStart() == 0> mscWaitForButton();│ ├──> <mscStart() != 0> systemResetFromMsc()│ ├──> <USE_PERSISTENT_MSC_RTC>│ │ ├──> persistentObjectWrite(PERSISTENT_OBJECT_RTC_HIGH, 0);│ │ └──> persistentObjectWrite(PERSISTENT_OBJECT_RTC_LOW, 0);│ └──> <USE_I2C>│ ├──> i2cHardwareConfigure(i2cConfig(0));│ ├──> <USE_I2C_DEVICE_1> i2cInit(I2CDEV_1);│ ├──> <USE_I2C_DEVICE_2> i2cInit(I2CDEV_2);│ ├──> <USE_I2C_DEVICE_3> i2cInit(I2CDEV_3);│ └──> <USE_I2C_DEVICE_4> i2cInit(I2CDEV_4);├──> <USE_HARDWARE_REVISION_DETECTION> updateHardwareRevision ├──> <USE_VTX_RTC6705> bool useRTC6705 = rtc6705IOInit(vtxIOConfig());├──> <USE_CAMERA_CONTROL> cameraControlInit();├──> <USE_ADC> adcInit(adcConfig());├──> initBoardAlignment(boardAlignment());├──> <!sensorsAutodetect()>│ ├──> <isSystemConfigured()>│ │ └──> indicateFailure(FAILURE_MISSING_ACC, 2);│ └──> setArmingDisabled(ARMING_DISABLED_NO_GYRO);├──> systemState |= SYSTEM_STATE_SENSORS_READY;├──> gyroSetTargetLooptime(pidConfig()->pid_process_denom); // Set the targetLooptime based on the detected gyro sampleRateHz and pid_process_denom├──> validateAndFixGyroConfig();├──> gyroSetTargetLooptime(pidConfig()->pid_process_denom); // Now reset the targetLooptime as it's possible for the validation to change the pid_process_denom├──> gyroInitFilters();├──> pidInit(currentPidProfile);├──> mixerInitProfile();├──> <USE_PID_AUDIO> pidAudioInit();├──> <USE_SERVOS>│ ├──> servosInit();│ ├──> <isMixerUsingServos()> servoDevInit(&servoConfig()->dev) //pwm_params.useChannelForwarding = featureIsEnabled(FEATURE_CHANNEL_FORWARDING);│ └──> servosFilterInit();├──> <USE_PINIO> pinioInit(pinioConfig());├──> <USE_PIN_PULL_UP_DOWN> pinPullupPulldownInit();├──> <USE_PINIOBOX> pinioBoxInit(pinioBoxConfig());├──> [LED Oprations]├──> imuInit();├──> failsafeInit();├──> rxInit();├──> <USE_GPS> <featureIsEnabled(FEATURE_GPS)>│ ├──> gpsInit();│ └──> <USE_GPS_RESCUE> gpsRescueInit();├──> <USE_LED_STRIP>│ ├──> ledStripInit();│ └──> <featureIsEnabled(FEATURE_LED_STRIP)> ledStripEnable();├──> <USE_ESC_SENSOR> <featureIsEnabled(FEATURE_ESC_SENSOR)> escSensorInit();├──> <USE_USB_DETECT> usbCableDetectInit();├──> <USE_TRANSPONDER> <featureIsEnabled(FEATURE_TRANSPONDER)>│ ├──> transponderInit();│ ├──> transponderStartRepeating();│ └──> systemState |= SYSTEM_STATE_TRANSPONDER_ENABLED;├──> <USE_FLASH_CHIP> <!(initFlags & FLASH_INIT_ATTEMPTED)>│ └──> flashInit(flashConfig());initFlags |= FLASH_INIT_ATTEMPTED;├──> <USE_FLASHFS> flashfsInit();├──> <USE_SDCARD> <dcardConfig()->mode> <!(initFlags & SD_INIT_ATTEMPTED)>│ └──> sdCardAndFSInit();initFlags |= SD_INIT_ATTEMPTED;├──> <USE_BLACKBOX> blackboxInit();├──> <USE_ACC> <mixerConfig()->mixerMode == MIXER_GIMBAL> accStartCalibration();├──> gyroStartCalibration(false);├──> <USE_BARO> baroStartCalibration();├──> positionInit();├──> <defined(USE_VTX_COMMON) || defined(USE_VTX_CONTROL)> vtxTableInit();├──> <USE_VTX_CONTROL> │ ├──> vtxControlInit();│ ├──> <USE_VTX_COMMON> vtxCommonInit();│ ├──> <USE_VTX_MSP> vtxMspInit();│ ├──> <USE_VTX_SMARTAUDIO> vtxSmartAudioInit();│ ├──> <USE_VTX_TRAMP> vtxTrampInit();│ └──> <USE_VTX_RTC6705> <!vtxCommonDevice() && useRTC6705> vtxRTC6705Init();├──> <USE_TIMER> timerStart();├──> batteryInit(); // always needs doing, regardless of features.├──> <USE_RCDEVICE> rcdeviceInit();├──> <USE_PERSISTENT_STATS> statsInit();├──> [Initialize MSP]│ ├──> mspInit();│ └──> mspSerialInit();├──> <USE_CMS> cmsInit();├──> <defined(USE_OSD) || (defined(USE_MSP_DISPLAYPORT) && defined(USE_CMS))> displayPort_t *osdDisplayPort = NULL;├──> <USE_OSD>│ ├──> osdDisplayPortDevice_e osdDisplayPortDevice = OSD_DISPLAYPORT_DEVICE_NONE;│ └──> <featureIsEnabled(FEATURE_OSD)>│ ├──> osdDisplayPortDevice_e device = osdConfig()->displayPortDevice;│ ├──> <case OSD_DISPLAYPORT_DEVICE_AUTO:> FALLTHROUGH;│ ├──> <case OSD_DISPLAYPORT_DEVICE_FRSKYOSD:>│ │ ├──> osdDisplayPort = frskyOsdDisplayPortInit(vcdProfile()->video_system);│ │ └──> <osdDisplayPort || device == OSD_DISPLAYPORT_DEVICE_FRSKYOSD> osdDisplayPortDevice = OSD_DISPLAYPORT_DEVICE_FRSKYOSD; break;│ ├──> <case OSD_DISPLAYPORT_DEVICE_MAX7456:>│ │ └──> <max7456DisplayPortInit(vcdProfile(), &osdDisplayPort) || device == OSD_DISPLAYPORT_DEVICE_MAX7456> osdDisplayPortDevice = OSD_DISPLAYPORT_DEVICE_MAX7456;break;│ ├──> <case OSD_DISPLAYPORT_DEVICE_MSP:>│ │ ├──> osdDisplayPort = displayPortMspInit();│ │ └──> <osdDisplayPort || device == OSD_DISPLAYPORT_DEVICE_MSP> osdDisplayPortDevice = OSD_DISPLAYPORT_DEVICE_MSP; break;│ ├──> <case OSD_DISPLAYPORT_DEVICE_NONE:) default:│ ├──> osdInit(osdDisplayPort, osdDisplayPortDevice);│ └──> <osdDisplayPortDevice == OSD_DISPLAYPORT_DEVICE_NONE> featureDisableImmediate(FEATURE_OSD);├──> <defined(USE_CMS) && defined(USE_MSP_DISPLAYPORT)> <!osdDisplayPort> cmsDisplayPortRegister(displayPortMspInit());├──> <USE_DASHBOARD> <featureIsEnabled(FEATURE_DASHBOARD)>│ ├──> dashboardInit();│ ├──> <USE_OLED_GPS_DEBUG_PAGE_ONLY> dashboardShowFixedPage(PAGE_GPS);│ └──> <!USE_OLED_GPS_DEBUG_PAGE_ONLY> dashboardResetPageCycling();dashboardEnablePageCycling();├──> <USE_TELEMETRY> <featureIsEnabled(FEATURE_TELEMETRY)> telemetryInit();├──> setArmingDisabled(ARMING_DISABLED_BOOT_GRACE_TIME);├──> <defined(USE_SPI) && defined(USE_SPI_DMA_ENABLE_EARLY)> spiInitBusDMA();├──> <USE_MOTOR> │ ├──> motorPostInit();│ └──> motorEnable();├──> <defined(USE_SPI) && defined(USE_SPI_DMA_ENABLE_LATE) && !defined(USE_SPI_DMA_ENABLE_EARLY)>│ └──> spiInitBusDMA();├──> debugInit();├──> unusedPinsInit();├──> tasksInit();└──> systemState |= SYSTEM_STATE_READY;
初始化可以分成两大部分:
应用层的初始化通常是在对应的驱动层初始化之后。
2.2.运行
始化完成以后就执行run函数,它是一个BetaFlight自研的一个时间片任务调度器。这种调度器的实时性是介于裸机和RTOS之间的,它比传统裸机的任务顺序执行效率高,但没有FreeRTOS的实时性那么强。
run└──> loop: scheduler()
scheduler├──> <gyroEnabled>│ ├──> [Realtime gyro/filtering/PID tasks get complete priority]│ │ ├──> task_t *gyroTask = getTask(TASK_GYRO)│ │ ├──> nowCycles = getCycleCounter()│ │ ├──> nextTargetCycles = lastTargetCycles + desiredPeriodCycles│ │ └──> schedLoopRemainingCycles = cmpTimeCycles(nextTargetCycles, nowCycles)│ │ ################################################################################│ │ # Rootcause: USB VCP Data Transfer│ │ ################################################################################│ ├──> <schedLoopRemainingCycles < -desiredPeriodCycles> //错过了一个desiredPeriodCycles周期,导致剩余时间负值(且大于一个运行周期)│ │ ├──> nextTargetCycles += desiredPeriodCycles * (1 + (schedLoopRemainingCycles / -desiredPeriodCycles)) //常见USB配置工具连接的时候,尽力挽救scheduler算法│ │ └──> schedLoopRemainingCycles = cmpTimeCycles(nextTargetCycles, nowCycles)│ │ ################################################################################│ │ # schedLoopStartMinCycles range rebound│ │ ################################################################################│ ├──> <(schedLoopRemainingCycles < schedLoopStartMinCycles) && (schedLoopStartCycles < schedLoopStartMaxCycles)>│ │ └──> schedLoopStartCycles += schedLoopStartDeltaUpCycles│ └──> <schedLoopRemainingCycles < schedLoopStartCycles>│ ├──> <schedLoopStartCycles > schedLoopStartMinCycles>│ │ └──> schedLoopStartCycles -= schedLoopStartDeltaDownCycles│ │ ################################################################################│ │ #轮询的方式读取陀螺仪数据│ │ ################################################################################│ ├──> <while (schedLoopRemainingCycles > 0)> │ │ ├──> nowCycles = getCycleCounter();│ │ └──> schedLoopRemainingCycles = cmpTimeCycles(nextTargetCycles, nowCycles);│ │ ################################################################################│ │ # 执行陀螺仪/滤波器/pid任务并检查rc链路中的数据可用性│ │ ################################################################################│ ├──> currentTimeUs = micros()│ ├──> taskExecutionTimeUs += schedulerExecuteTask(gyroTask, currentTimeUs)│ ├──> <gyroFilterReady()> taskExecutionTimeUs += schedulerExecuteTask(getTask(TASK_FILTER), currentTimeUs)│ ├──> <pidLoopReady()> taskExecutionTimeUs += schedulerExecuteTask(getTask(TASK_PID), currentTimeUs)│ ├──> rxFrameCheck(currentTimeUs, cmpTimeUs(currentTimeUs, getTask(TASK_RX)->lastExecutedAtUs)) //检查是否有新的RC控制链路数据包收到│ ├──> <cmp32(millis(), lastFailsafeCheckMs) > PERIOD_RXDATA_FAILURE> //核查、更新failsafe状态│ ├──> lastTargetCycles = nextTargetCycles│ ├──> gyroDev_t *gyro = gyroActiveDev() //获取活跃的gyro设备│ │ ################################################################################│ │ # 使用gyro_RATE_COUNT/gyro_LOCK_COUNT实现精确的陀螺仪时间同步│ │ ################################################################################│ └──> [Sync scheduler into lock with gyro] // gyro->gyroModeSPI != GYRO_EXTI_NO_INT, 这里指数级收敛,只要desiredPeriodCycles越精准,理论精度会越高│ ├──> [Calculate desiredPeriodCycles = sampleCycles / GYRO_RATE_COUNT and reset terminalGyroRateCount += GYRO_RATE_COUNT]│ └──> [Sync lastTargetCycles using exponential normalization by GYRO_RATE_COUNT/GYRO_LOCK_COUNT times iteration]├──> nowCycles = getCycleCounter();schedLoopRemainingCycles = cmpTimeCycles(nextTargetCycles, nowCycles);├──> <!gyroEnabled || (schedLoopRemainingCycles > (int32_t)clockMicrosToCycles(CHECK_GUARD_MARGIN_US))>│ │ ################################################################################│ │ # Find task need to be execute when there is time.│ │ ################################################################################│ ├──> currentTimeUs = micros()│ ├──> for (task_t *task = queueFirst(); task != NULL; task = queueNext()) <task->attribute->staticPriority != TASK_PRIORITY_REALTIME> //Update task dynamic priorities│ │ ├──> <task->attribute->checkFunc> //有属性检查函数│ │ │ ├──> <task->dynamicPriority > 0>│ │ │ │ ├──> task->taskAgePeriods = 1 + (cmpTimeUs(currentTimeUs, task->lastSignaledAtUs) / task->attribute->desiredPeriodUs);│ │ │ │ └──> task->dynamicPriority = 1 + task->attribute->staticPriority * task->taskAgePeriods;│ │ │ ├──> <task->attribute->checkFunc(currentTimeUs, cmpTimeUs(currentTimeUs, task->lastExecutedAtUs))>│ │ │ │ ├──> const uint32_t checkFuncExecutionTimeUs = cmpTimeUs(micros(), currentTimeUs);│ │ │ │ ├──> checkFuncMovingSumExecutionTimeUs += checkFuncExecutionTimeUs - checkFuncMovingSumExecutionTimeUs / TASK_STATS_MOVING_SUM_COUNT;│ │ │ │ ├──> checkFuncMovingSumDeltaTimeUs += task->taskLatestDeltaTimeUs - checkFuncMovingSumDeltaTimeUs / TASK_STATS_MOVING_SUM_COUNT;│ │ │ │ ├──> checkFuncTotalExecutionTimeUs += checkFuncExecutionTimeUs; // time consumed by scheduler + task│ │ │ │ ├──> checkFuncMaxExecutionTimeUs = MAX(checkFuncMaxExecutionTimeUs, checkFuncExecutionTimeUs)│ │ │ │ ├──> task->lastSignaledAtUs = currentTimeUs│ │ │ │ ├──> task->taskAgePeriods = 1│ │ │ │ └──> task->dynamicPriority = 1 + task->attribute->staticPriority│ │ │ └──> <else>│ │ │ └──> task->taskAgePeriods = 0│ │ ├──> <!task->attribute->checkFunc> //无属性检查函数│ │ │ ├──> task->taskAgePeriods = (cmpTimeUs(currentTimeUs, task->lastExecutedAtUs) / task->attribute->desiredPeriodUs)│ │ │ └──> <task->taskAgePeriods > 0>│ │ │ └──> task->dynamicPriority = 1 + task->attribute->staticPriority * task->taskAgePeriods│ │ └──> <task->dynamicPriority > selectedTaskDynamicPriority>│ │ ├──> timeDelta_t taskRequiredTimeUs = task->anticipatedExecutionTime >> TASK_EXEC_TIME_SHIFT│ │ ├──> int32_t taskRequiredTimeCycles = (int32_t)clockMicrosToCycles((uint32_t)taskRequiredTimeUs)│ │ ├──> taskRequiredTimeCycles += checkCycles + taskGuardCycles //增加守护时间(预留一些)│ │ └──> <taskRequiredTimeCycles < schedLoopRemainingCycles> || //剩余时间足够执行任务│ │ <(scheduleCount & SCHED_TASK_DEFER_MASK) == 0> || │ │ <(task - tasks) == TASK_SERIAL)> //串行任务不阻塞│ │ ├──> selectedTaskDynamicPriority = task->dynamicPriority;│ │ └──> selectedTask = task; //选中任务│ │ ################################################################################│ │ # 选择任务执行│ │ ################################################################################│ ├──> checkCycles = cmpTimeCycles(getCycleCounter(), nowCycles) //优先级调整,以及checkFunc运行需要计算耗时时间│ └──> <selectedTask>│ ├──> timeDelta_t taskRequiredTimeUs = selectedTask->anticipatedExecutionTime >> TASK_EXEC_TIME_SHIFT // Recheck the available time as checkCycles is only approximate│ ├──> int32_t taskRequiredTimeCycles = (int32_t)clockMicrosToCycles((uint32_t)taskRequiredTimeUs)│ ├──> nowCycles = getCycleCounter()│ ├──> schedLoopRemainingCycles = cmpTimeCycles(nextTargetCycles, nowCycles)│ ├──> <!gyroEnabled || (taskRequiredTimeCycles < schedLoopRemainingCycles)>│ │ ├──> uint32_t antipatedEndCycles = nowCycles + taskRequiredTimeCycles;│ │ ├──> taskExecutionTimeUs += schedulerExecuteTask(selectedTask, currentTimeUs);│ │ ├──> nowCycles = getCycleCounter();│ │ ├──> int32_t cyclesOverdue = cmpTimeCycles(nowCycles, antipatedEndCycles);│ │ ├──> <(currentTask - tasks) == TASK_RX>│ │ │ └──> skippedRxAttempts = 0│ │ ├──> <(currentTask - tasks) == TASK_OSD>│ │ │ └──> skippedOSDAttempts = 0│ │ ├──> <(cyclesOverdue > 0) || (-cyclesOverdue < taskGuardMinCycles)> //超时,但可控在taskGuardMinCycles范围之内│ │ │ └──> <taskGuardCycles < taskGuardMaxCycles>│ │ │ └──> taskGuardCycles += taskGuardDeltaUpCycles //增加守护时间(预留更多一些)│ │ └──> <else if (taskGuardCycles > taskGuardMinCycles> //未超时│ │ └──> taskGuardCycles -= taskGuardDeltaDownCycles; //减少守护时间│ │ ################################################################################│ │ # 特殊任务处理│ │ ################################################################################│ └──> <else <selectedTask->taskAgePeriods > TASK_AGE_EXPEDITE_COUNT>) ||│ <((selectedTask - tasks) == TASK_OSD) && (TASK_AGE_EXPEDITE_OSD != 0) && (++skippedOSDAttempts > TASK_AGE_EXPEDITE_OSD)> ||│ <((selectedTask - tasks) == TASK_RX) && (TASK_AGE_EXPEDITE_RX != 0) && (++skippedRxAttempts > TASK_AGE_EXPEDITE_RX)>│ └──> selectedTask->anticipatedExecutionTime *= TASK_AGE_EXPEDITE_SCALE└──> scheduleCount++;
3.如何使用这个程序
3.1.目标文件源码分析
BetaFlight的代码最初clone过来时,也是继承了嵌入式代码一贯的target目标板设计思路;也就是说,针对每个板子有一份对应的目录,有对应的target代码,比如:芯片、板子初始化等代码。
打开src/main/target,我们就可以看到betaflight目前支持的主控芯片型号。

我们要使用betaflight这个程序,通常就是修改target.c和target.h文件。
打开target.h,可以看到使用一些宏定义做了声明。
#pragma once#define TARGET_BOARD_IDENTIFIER "S411"
#define USBD_PRODUCT_STRING "Betaflight STM32F411"
#define USE_I2C_DEVICE_1
#define USE_I2C_DEVICE_2
#define USE_I2C_DEVICE_3
#define USE_UART1
#define USE_UART2
#define USE_UART6
#define SERIAL_PORT_COUNT (UNIFIED_SERIAL_PORT_COUNT + 3)
#define USE_INVERTER
#define USE_SPI_DEVICE_1
#define USE_SPI_DEVICE_2
#define USE_SPI_DEVICE_3
#define TARGET_IO_PORTA 0xffff
#define TARGET_IO_PORTB 0xffff
#define TARGET_IO_PORTC 0xffff
#define TARGET_IO_PORTD 0xffff
#define TARGET_IO_PORTE 0xffff
#define USE_I2C
#define I2C_FULL_RECONFIGURABILITY
#define USE_DSHOT_BITBAND
#define USE_BEEPER
#ifdef USE_SDCARD
#define USE_SDCARD_SPI
#define USE_SDCARD_SDIO
#endif
#define USE_SPI
#define SPI_FULL_RECONFIGURABILITY
#define USE_VCP
#define USE_SOFTSERIAL1
#define USE_SOFTSERIAL2
#define UNIFIED_SERIAL_PORT_COUNT 3
#define USE_USB_DETECT
#define USE_ESCSERIAL
#define USE_ADC
#define USE_CUSTOM_DEFAULTS
默认是没有任何IO配置的,用到的PIN引脚也是NONE,这就需要我们自己添加和修改。如何正确添加和修改这些配置,首先要对四轴飞行器的一些功能模块有所了解。
四轴飞行器的功能模块和相关驱动
基本模块是飞行器必须要有的,缺少就飞不起来;拓展模块有些是根据自己实际需要添加。驱动这些模块本质还是配置单片机的功能外设。
3.2.添加目标文件
我们可以根据自己使用的硬件平台,新建一个target,这里就以STM32F411为例。

下面就需要根据自己的原理图,进行配置target.c和target.h文件。
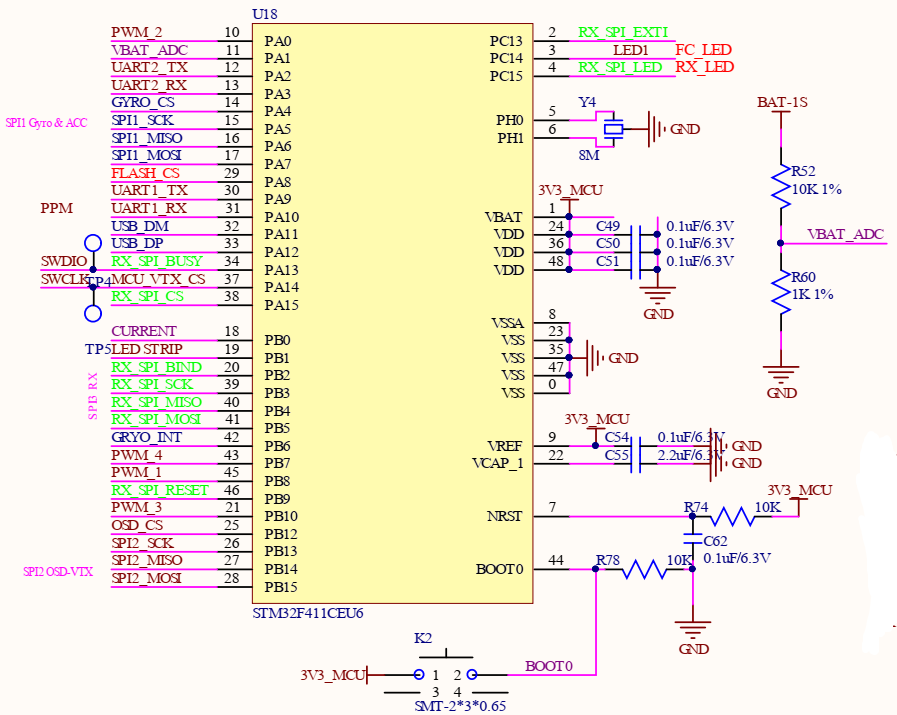
在target.h里通过宏定义更改配置,这里主要就是根据原理图添加对应PIN引脚
#pragma once
#define TARGET_BOARD_IDENTIFIER "STM32F411_MyFirmware"
#define USBD_PRODUCT_STRING "STM32F411_MyFirmware"
/* ======== LED ======== */
#define USE_LED_STRIP
#define USE_LED_STRIP_STATUS_MODE
#define LED0_PIN PC14
/* ======== UART ======== */
#define USE_UART
#define USE_VCP
#define USE_UART1
#define UART1_RX_PIN PA10
#define UART1_TX_PIN PA9
#define USE_UART2
#define UART2_RX_PIN PA3
#define UART2_TX_PIN PA2
#define SERIAL_PORT_COUNT 3
/* ======== SPI ======== */
#define USE_SPI
#define USE_SPI_DEVICE_1
#define SPI1_SCK_PIN PA5
#define SPI1_MISO_PIN PA6
#define SPI1_MOSI_PIN PA7
#define SPI1_NSS_PIN PA4
#define USE_SPI_DEVICE_2
#define SPI2_SCK_PIN PB13
#define SPI2_MISO_PIN PB14
#define SPI2_MOSI_PIN PB15
#define USE_SPI_DEVICE_3
#define SPI3_SCK_PIN PB3
#define SPI3_MISO_PIN PB4
#define SPI3_MOSI_PIN PB5
/* ======== GYRO & ACC ======== */
#define USE_ACC
#define USE_GYRO
#define USE_SPI_GYRO
#define USE_ACCGYRO_BMI270
#define USE_EXTI
#define USE_GYRO_EXTI
#define GYRO_1_EXTI_PIN PB6
#define USE_MPU_DATA_READY_SIGNAL
#define GYRO_1_CS_PIN SPI1_NSS_PIN
#define GYRO_1_SPI_INSTANCE SPI1
#define GYRO_1_ALIGN CW180_DEG
/* ======== OSD ======== */
#define USE_OSD
#define USE_CANVAS
#define USE_CMS
#define USE_CMS_FAILSAFE_MENU
#define USE_EXTENDED_CMS_MENUS
#define USE_MSP_DISPLAYPORT
#define USE_OSD_OVER_MSP_DISPLAYPORT
#define USE_OSD_ADJUSTMENTS
#define USE_OSD_PROFILES
#define USE_OSD_STICK_OVERLAY
#define USE_MAX7456
#define MAX7456_SPI_CS_PIN PB12
#define MAX7456_SPI_INSTANCE SPI2
/* ======== VTX ======== */
#define USE_VTX
#define USE_VTX_COMMON
#define USE_VTX_CONTROL
#define USE_VTX_MSP
#define USE_VTX_TABLE
#define USE_VTX_RTC6705
#define SPI_SHARED_MAX7456_AND_RTC6705
#define RTC6705_CS_PIN PA14
#define RTC6705_SPI_INSTANCE SPI2
#define CMS_SKIP_EMPTY_VTX_TABLE_ENTRIES
/* ======== RX ======== */
#define USE_RX_SPI
#define USE_RX_PPM
#define USE_RX_PWM
#define USE_SERIALRX
#define USE_SERIALRX_CRSF // Team Black Sheep Crossfire protocol
#define USE_SERIALRX_GHST // ImmersionRC Ghost Protocol
#define USE_SERIALRX_IBUS // FlySky and Turnigy receivers
#define USE_SERIALRX_SBUS // Frsky and Futaba receivers
#define USE_SERIALRX_SPEKTRUM // SRXL, DSM2 and DSMX protocol
#define USE_SERIALRX_FPORT // FrSky FPort
#define USE_SERIALRX_XBUS // JR
#define USE_SERIALRX_SRXL2 // Spektrum SRXL2 protocol
#define USE_SERIALRX_JETIEXBUS
#define USE_SERIALRX_SUMD // Graupner Hott protocol
#define USE_SERIALRX_SUMH // Graupner legacy protocol
#define USE_CRSF_V3
#define USE_CRSF_CMS_TELEMETRY
#define USE_CRSF_LINK_STATISTICS
#define USE_TELEMETRY
#define USE_TELEMETRY_FRSKY_HUB
#define USE_TELEMETRY_SMARTPORT
#define USE_TELEMETRY_CRSF
#define USE_TELEMETRY_GHST
#define USE_TELEMETRY_SRXL
#define USE_TELEMETRY_IBUS
#define USE_TELEMETRY_IBUS_EXTENDED
#define USE_TELEMETRY_JETIEXBUS
#define USE_TELEMETRY_MAVLINK
#define USE_TELEMETRY_HOTT
#define USE_TELEMETRY_LTM
#define USE_SPEKTRUM_BIND
#define USE_SPEKTRUM_BIND_PLUG
#define USE_SPEKTRUM_REAL_RSSI
#define USE_SPEKTRUM_FAKE_RSSI
#define USE_SPEKTRUM_RSSI_PERCENT_CONVERSION
#define USE_SPEKTRUM_VTX_CONTROL
#define USE_SPEKTRUM_VTX_TELEMETRY
#define USE_SPEKTRUM_CMS_TELEMETRY
#define RX_SPI_INSTANCE SPI3
#define RX_SPI_LED_INVERTED
#define RX_NSS_PIN PA15
#define RX_SPI_LED_PIN PC15
#define RX_SPI_EXTI_PIN PC13
#define RX_SPI_BIND_PIN PB2
#define RX_EXPRESSLRS_SPI_RESET_PIN PB9
#define RX_EXPRESSLRS_SPI_BUSY_PIN PA13
#define RX_EXPRESSLRS_TIMER_INSTANCE TIM5
#define USE_TELEMETRY
#define USE_RX_EXPRESSLRS
#define USE_RX_SX1280
#define DEFAULT_RX_FEATURE FEATURE_RX_SPI
#define RX_SPI_DEFAULT_PROTOCOL RX_SPI_EXPRESSLRS
/* ======== ADC ======== */
#define USE_ADC
#define ADC_INSTANCE ADC1
#define ADC1_DMA_OPT 0
#define VBAT_ADC_PIN PA1
#define CURRENT_METER_ADC_PIN PB0
#define VBAT_SCALE_DEFAULT 110
#define CURRENT_METER_SCALE_DEFAULT 510
#define CURRENT_METER_OFFSET_DEFAULT 0
#define DEFAULT_VOLTAGE_METER_SOURCE VOLTAGE_METER_ADC
#define DEFAULT_CURRENT_METER_SOURCE CURRENT_METER_ADC
/* ======== ESC ======== */
#define USE_DSHOT
#define USE_DSHOT_DMAR
#define USE_DSHOT_BITBANG
#define USE_DSHOT_TELEMETRY
#define USE_DSHOT_TELEMETRY_STATS
#define USE_BRUSHED_ESC_AUTODETECT // Detect if brushed motors are connected and set defaults appropriately to avoid motors spinning on boot
#define ENABLE_DSHOT_DMAR DSHOT_DMAR_ON
#define DSHOT_BITBANG_DEFAULT DSHOT_BITBANG_AUTO
/* ======== OTHER ======== */
#define USE_BLACKBOX
#define USE_SERVOS
#define USE_PINIO
#define USE_PINIOBOX
#define DEFAULT_FEATURES (FEATURE_INFLIGHT_ACC_CAL | FEATURE_LED_STRIP | FEATURE_OSD)
#define TARGET_IO_PORTA 0xffff
#define TARGET_IO_PORTB 0xffff
#define TARGET_IO_PORTC 0xffff
#define TARGET_IO_PORTD (BIT(2))
#define USE_BEEPER
#define USABLE_TIMER_CHANNEL_COUNT 5
#define USED_TIMERS ( TIM_N(2) | TIM_N(3) | TIM_N(4) )
#define USE_TARGET_CONFIG
target.c里主要是配置电机、WS2812、蜂鸣器等需要PWM的驱动。
#include <stdint.h>#include "platform.h"
#include "drivers/io.h"#include "drivers/dma.h"
#include "drivers/timer.h"
#include "drivers/timer_def.h"const timerHardware_t timerHardware[USABLE_TIMER_CHANNEL_COUNT] = {DEF_TIM(TIM4, CH3, PB8, TIM_USE_MOTOR, 0, 0), // M1DEF_TIM(TIM2, CH1, PA0, TIM_USE_MOTOR, 0, 0), // M2DEF_TIM(TIM2, CH3, PB10, TIM_USE_MOTOR, 0, 0), // M3DEF_TIM(TIM4, CH2, PB7, TIM_USE_MOTOR, 0, 0), // M4DEF_TIM(TIM3, CH4, PB1, TIM_USE_LED, 0, 0) // LED Strip
};
其实target的配置,就是相当于在betaflight configurator的CLI窗口,一行一行的输入,然后把数据保存到飞控芯片的flash。
3.3.编译程序
修改好target文件之后,就可以编译生产hex文件了。使用STM32单片机做开发的应该都用过Keil进行编译程序,但是betaflight程序是要用gcc-arm编译的。
在make/tool.mk可以看到需要的工具链为gcc-arm-none-eabi-10.3-2021.10

关于如何安装这个工具链可以看另一篇文章
使用VScode编译betaflight固件–基于ubuntu平台
这是一种把工具链当做全局环境变量使用的方法,还有一种方法是只能在本工程使用的环境变量。
在命令行输入:
make arm_sdk_install
系统就会自动安装本工程需要的gcc-arm编译器,安装路径就在betaflight/downloads文件夹下,这样的好处就是移植方便,把代码放到另一台还没安装gcc-arm编译器的电脑上也能编译。
安装好编译器之后就可以使用make命令进行编译了。
使用方法也简单,在终端输入
make target名称
看到上面的提示代表成功生成固件了,文件路径就在betaflight/obj/main目录下
4.参考文献
1.BetaFlight开源工程结构简明介绍
2.BetaFlight开源代码框架简介
3.betaflight 代码结构