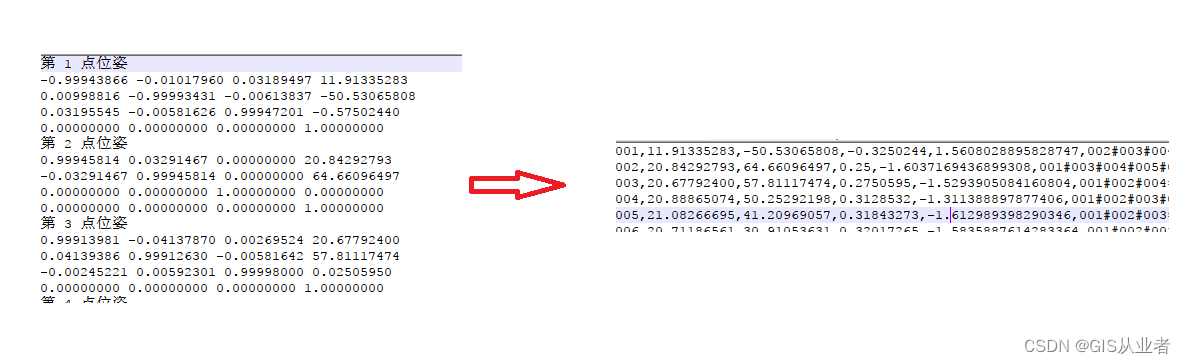
python脚本实现全景站点矩阵转欧拉角
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.hqwc.cn/news/496400.html
如若内容造成侵权/违法违规/事实不符,请联系编程知识网进行投诉反馈email:809451989@qq.com,一经查实,立即删除!相关文章

c++异常机制(1) -- 什么是异常机制
情况一:
之前,我们提到了防御性编程,就是说我们预判一些可能出现的问题,然后进行相应的处理。 但是,这些处理往往是在函数中进行的。
比如,判断数组下标是否合法。 -》 if(下标 < 0){ 相应的处理 };
如上&…

Python中常用的热门库Pygame介绍
Pygame是一个跨平台的Python模块和库,用于创建视频游戏,如独立游戏和多媒体应用。它提供了一组用于制作游戏的常用功能,包括图形、声音、碰撞检测等。Pygame是基于SDL(Simple DirectMedia Layer)库的,SDL是…

2024年要大干一场!桌面备忘录哪个好?桌面记事本便签软件哪里下载?
当谈到桌面备忘录哪个好的时候,我们常常会陷入选择困难之中。在这个信息爆炸的时代,我们需要一个高效、便捷、易用的工具来帮助我们记录重要事项,提醒日程安排,让我们可以在2024年当中大干一场。而在众多桌面备忘录软件中…


Asymmetric Directional Coupler(非对称型定向耦合器)
Asymmetric Directional Coupler 正文示例1------直波导耦合部分尺寸不一致示例2------直波导耦合部分材料有区别 正文
在 Directional coupler and Synchronous optical coupling(定向耦合器和同步光耦合) 和 Symmetric Directional Coupler and trans…


GDB动态调试学习-2-【断点】
文章目录 在程序地址上打断点在程序入口处打断点获取程序入口地址 在命名空间设置断点命名空间给命名空间的函数下断电 在文件行号上打断点保存已经设置的断点设置临时断点设置条件断点command指令 忽略断点 在程序地址上打断点
当调试汇编程序,或者没有调试信息的…
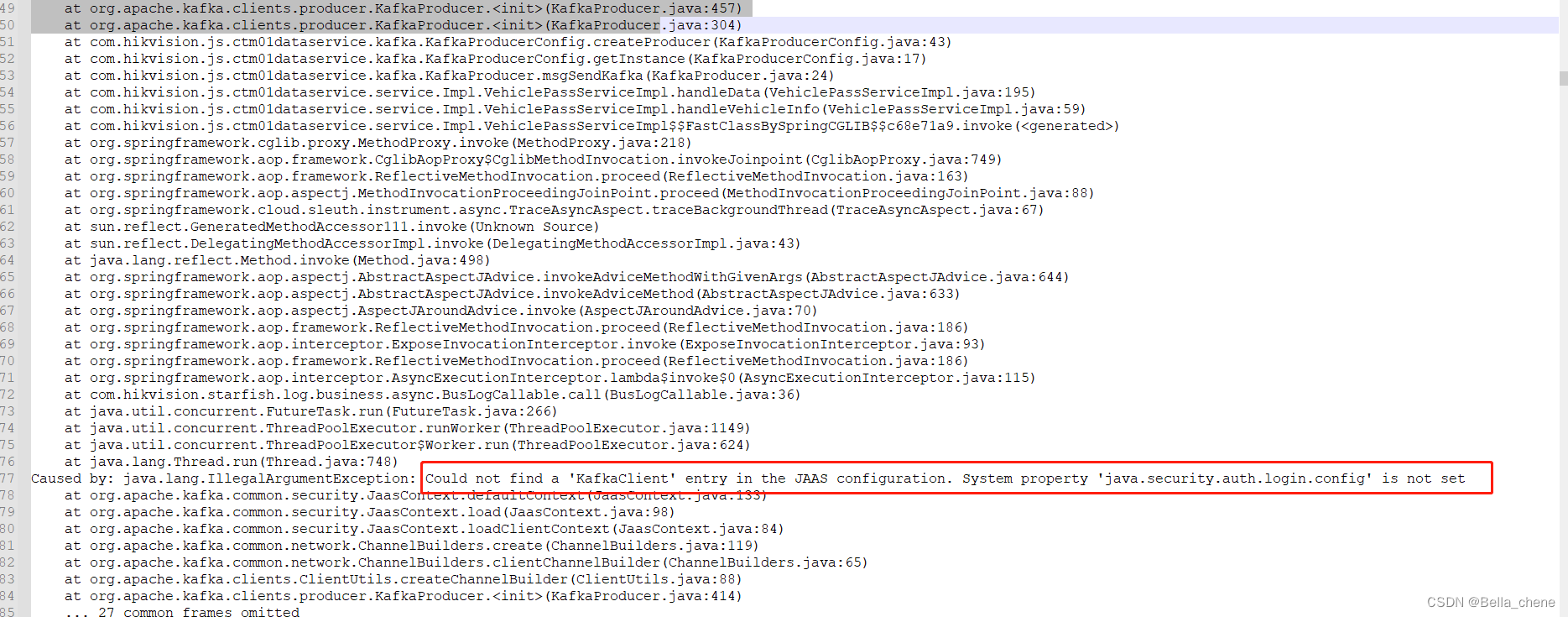
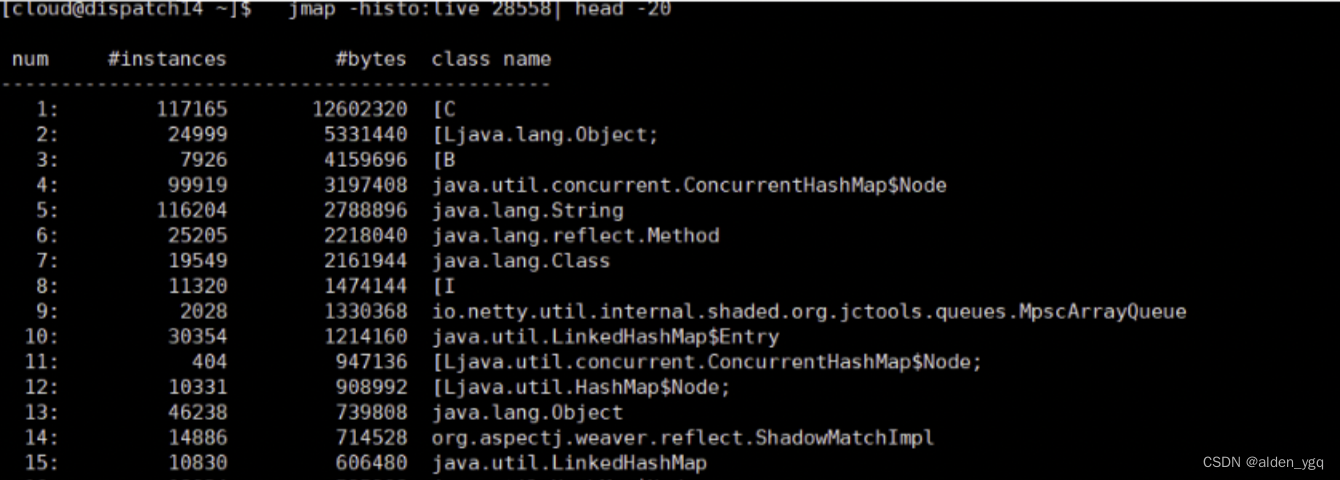
Kafka安全模式之身份认证
一、简介
Kafka作为一个分布式的发布-订阅消息系统,在日常项目中被频繁使用,通常情况下无论是生产者还是消费者只要订阅Topic后,即可进行消息的发送和接收。而kafka在0.9.0.0版本后添加了身份认证和权限控制两种安全服务,本文主要…
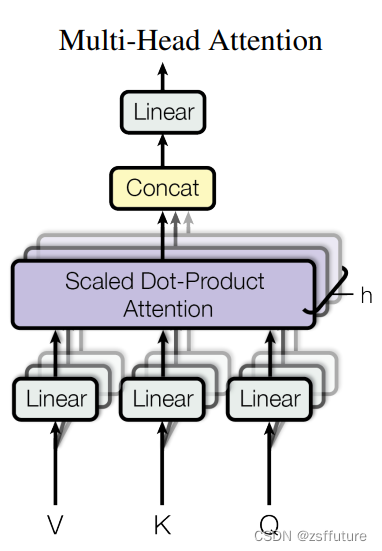
transformer--编码器(掩码张量、注意力机制、多头注意力机制)
编码器部分:
由N个编码器层堆叠而成每个编码器层由两个子层连接结构组成第一个子层连接结构包括一个多头自注意力子层和规范化层以及一个残差连接。第二个子层连接结构包括一个前馈全连接子层和规范化层以及一个残差连接
掩码张量
什么是掩码张量
掩代表遮掩,码…

【C++干货基地】C++:函数重载(深度解析Windows和Linux下函数的修饰规则)
🎬 鸽芷咕:个人主页 🔥 个人专栏: 《C干货基地》《粉丝福利》 ⛺️生活的理想,就是为了理想的生活! 引入 哈喽各位铁汁们好啊,我是博主鸽芷咕《C干货基地》是由我的襄阳家乡零食基地有感而发,不知道各位的…

HarmonyOS—使用数据模型和连接器
Serverless低代码开发平台是一个可视化的平台, 打通了HarmonyOS云侧与端侧能力,能够轻松实现HMS Core、AGC Serverless能力调用。其中,数据模型和连接器是两大主要元素。开发者在使用DevEco Studio的低代码功能进行开发时,可以使用…