试题1
被测物体100×100mm,精度要求被测物体 ,精度要求0.1mm,相机距被测物体在200~320mm之间,要求选择合适的相机和镜头?
分析如下:
通常我们用的相机靶面是4:3 的所以我们要用短边来计算视场,系统的精度是0.1 mm 那么100/0.1=1000 个像素,所以靶面尺寸的那个3 对应的就是1000 ,那我们选择可选定大恒CCD相机SV1410FM 靶面尺寸2/3英寸(8.8x6.6mm),分辨率1392x1040,像元尺寸是6.45μ m,此时可以计算出 镜头放大倍率是 β=6.6/100=0.066,可以达到的精度是 : 像素尺寸/放大倍率 =0.00645/0.066 =0.098mm <0.1mm
这个时候我们考虑一下安装的位置 200-320mm ,那就取260 mm 作为物距。
计算镜头的焦距:
f=wd/(1+1/β)=260/(1+1/0.066)=16.1mm

试题2
假设检测一个物体尺寸,要求拍摄的物体为大小 6*5mm 的矩形 , 要求的检测尺寸的公差带在± 0.06,其实我们在做重复性和grr 的时候一般的精度要要达到公差带的1/10,有的要达到1/30 ,这里我们就按1/10 来计算
分析如下:
0.06*2=0.12mm /10=0.012mm 因此我们的像元尺寸要小于精度的1/3,即0.012mm/3=0.004mm,
这样的话就是允许我们找错3个像素的误差。
6*5 mm 的视野我们需要让视野稍微大点 这样才能拍全,那我们可以将世界放的更大的点,8*7mm ,所以我们想要的分辨率就是 (8mm/0,004mm)*(7mm/0,004mm)=2000*1750=350w 个像素。下一步开始选相机
试题3
(已定相机选择镜头)已知客户观察范围为 30mm*30mm ,工作距离为 100mm , CCD尺寸为 1/3', 那么需要多少焦距的镜头
1/3' 相机的短边是3.6mm f/wd=(视野高+像元高)/像元高==》f=(100*3.6)/(30+3.6)=10.7mm
试题4
(相机和镜头均未知)项目要求:检测齿轮的安装质量和滚轴的直径公差 200 微米,在线检测 2 个 / 秒 , 测量齿轮实际大小为 11mm,公差带=200 μ m
相机选择
公差带是200μm ,那我们可以计算出相机的精度=200/30=6.7μm , 我们选择像元小于6.7μm 的香相机 ,我们用13mm 做为视野的大小,那么分辨率就是13/0.0067=1940 个像素,所以我们现在分辨率为2448*2048 。 在线检查2个/s,那我们可以 1/2s <=500毫秒的曝光时间的相机。
镜头选择
试题5
诗选远心镜头
(已定相机选择镜头)已知客户观察范围为 6mm*4mm , CCD 尺寸为 2/3'', 像元尺寸3.45 μ m ,那么需要大的远心镜头
试题6
测量要求:如图所示零件,其由长方体和托体组成,长方体长宽高尺寸分别为3*6*1mm,要求选择合适的传感器,测量托体上端面P1-P24点到长方体上端面的段差0.6±0.08mm,CT要求0.5s

公差带是0.6±0.08mm,那么我们可以计算出精度是 0.08*2/30=0.0054333,才能保证GRR和数据对比顺利通过. 3*6*1mm ,一条线的点间隔就是 4mm/0.0054=854 个点,那么我们可以选用点间隔是1000以上的相机,然后计算扫描的行数 我们假设长度是7mm ,线的间距为0.1/2=0.05mm ,那么我们计算的行数就是7/0.05=140,但是这个还是有问题,因为客户给的时间是 CT要求0.5s,那我们扫描的时间就是ct/3, 那么7/((0/0.16*0.05))=扫描评率.在3d 相机中最主要的就是Z的重复精度
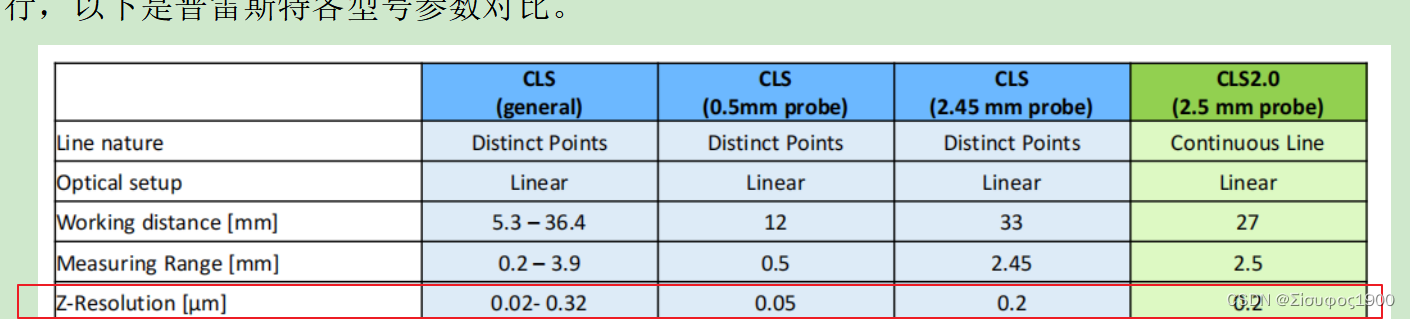
选相机的时候是重复精度*10 在加1 ,即0.2*10+1=3<5.43u

、WebDriverWait())](https://img-blog.csdnimg.cn/direct/e481880c43304632abcce5b1ec79eded.jpeg)