目录
1.整数在内存中的存储
2.大小端字节序和字节序判断
2.1什么是大小端?
2.2为什么会有大小端
3.浮点数在内存中的存储
3.1浮点数的存储
3.1.1 浮点数存的过程
3.1.2 浮点数取的过程
3.2 解析
3.3 验证浮点数的存储方式

1.整数在内存中的存储
整数的二进制表示方法有三种,即原码、反码、补码。
三种表示方法均有符号位和数值位两部分,数值位的最高位被当作符号位,其中0表示“正”,1表示“负”,剩余的位则为数值位。
对于正整数,它的原码、反码、补码都相同。
对与负整数,则三种表示方法各不相同:
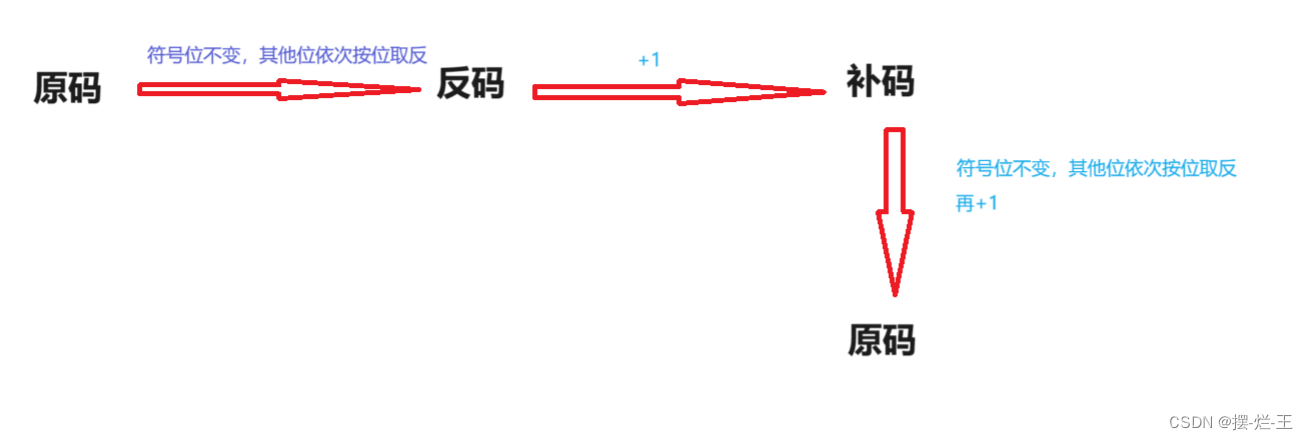
原码:直接将数值按照正负数的形式翻译成⼆进制得到的就是原码
反码:将原码的符号位不变,其他位依次按位取反就可以得到反码
补码:反码+1就得到补码
计算机再存储整数时,存放的都是补码。
原因是:
1.在计算机系统中,数值⼀律⽤补码来表示和存储。原因在于,使用补码,可以将符号位和数值域统一处理;
2.同时,加法和减法也可以统⼀处理(CPU只有加法器)此外,补码与原码相互转换,其运算过程是相同的,不需要额外的硬件电路。
2.大小端字节序和字节序判断
下面我们以一段代码来观察数据的存储

通过调试,我们可以发现0x11223344这个数字是以字节为单位,倒着存储的。
究其原因,我们了解到数据在内存中存储的顺序与大小端有关。
2.1什么是大小端?
大端(存储)模式:是指数据的低位字节内容保存在内存的高地址处,而数据的高位字节内容,保存 在内存的低地址处。
小端(存储)模式:是指数据的低位字节内容保存在内存的低地址处,而数据的高位字节内容,保存在内存的高地址处。
上面展示的就是按照小端模式存储字节顺序的。
我们也可以通过一端代码来判断我们的硬件是通过哪种模式来存储字节顺序的。
方法一:
#include<stdio.h>
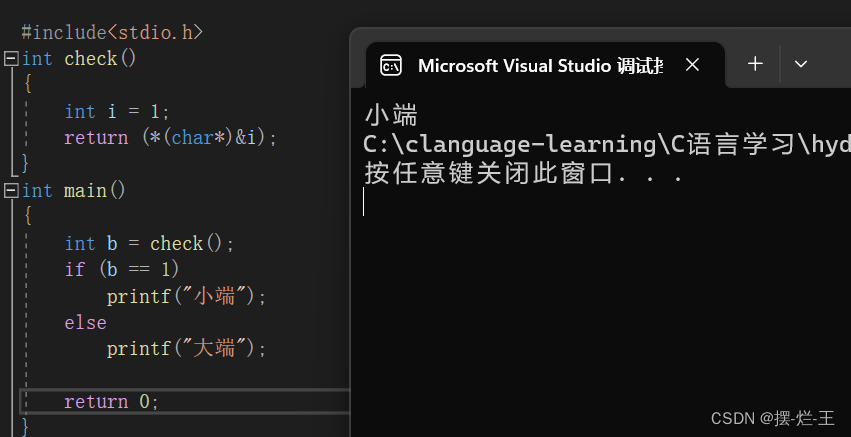
int check()
{int i = 1;return (*(char*)&i);
}
int main()
{int b = check();if (b == 1)printf("小端");elseprintf("大端");return 0;
}
方法二:
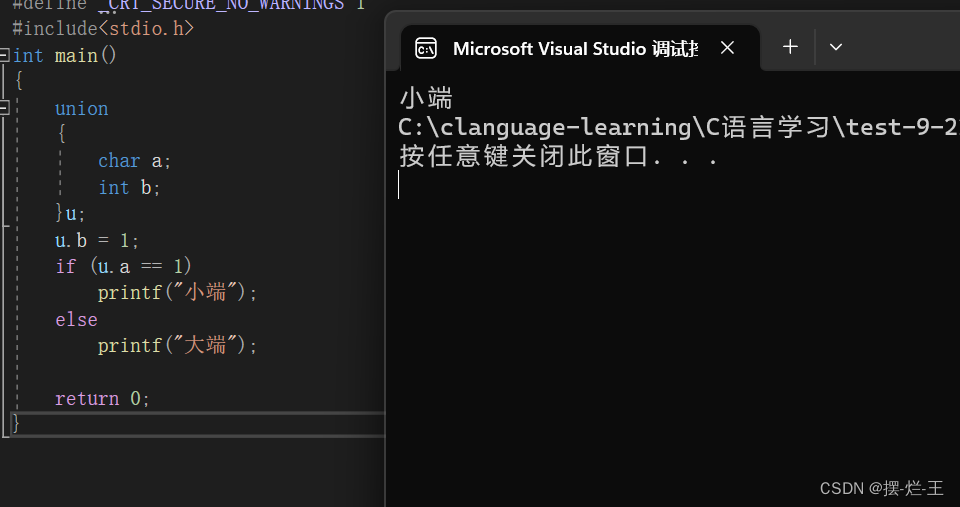
#define _CRT_SECURE_NO_WARNINGS 1
#include<stdio.h>
int main()
{union {char a;int b;}u;u.b = 1;if (u.a == 1)printf("小端");elseprintf("大端");return 0;
}
2.2为什么会有大小端
在计算机系统中,是以字节为单位的,每个地址单元都 对应着⼀个字节,⼀个字节为8bit 位,但是在C语言中除了8 bit 的 char 之外,还有16 bit 的 short 型,32 bit 的 long 型(要看具体的编译器),另外,对于位数大于8位的处理器,例如16位 或者32位的处理器,由于寄存器宽度大于一个字节,那么必然存在着一个如何将多个字节安排的问题。因此就导致了大端存储模式和小端存储模式。
例如:⼀个16bit 的 short 型 x ,在内存中的地址为 0x0010 , x 的值为 0x1122 ,那么 0x11 为高字节, 0x22 为低字节。对于⼤端模式,就将 0x11 放在低地址中,即 0x0010 中, 0x22 放在高地址中,即 0x0011 中。小端模式,刚好相反。我们常用的 X86 结构是小端模式,而KEIL C51 则为大端模式。很多的ARM,DSP都为小端模式。有些ARM处理器还可以由硬件来选择是大端模式还是小端模式。
3.浮点数在内存中的存储
先看下面一段代码的输出结果是什么?
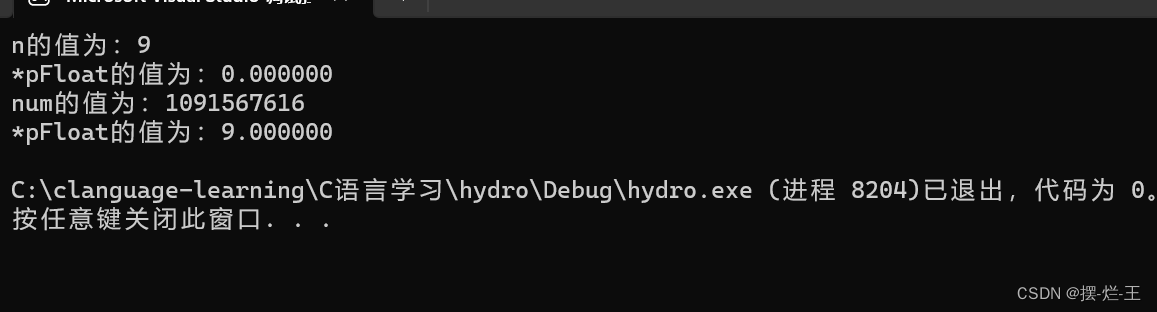
#include<stdio.h>
int main()
{int n = 9;float* pFloat = (float*)&n;printf("n的值为:%d\n", n);printf("*pFloat的值为:%f\n", *pFloat);*pFloat = 9.0;printf("num的值为:%d\n", n);printf("*pFloat的值为:%f\n", *pFloat);return 0;
}在看到答案之前各位可以思考一下到底会输出什么?
想必看到答案后,各位都应该和我最初看到答案是一样懵。
对于上面的问题,其实就是关于浮点数在内存中的存储方式。下面就来讲讲浮点数在内存中究竟是如何存储的。
3.1浮点数的存储
根据国际标准IEEE(电⽓和电⼦⼯程协会) 754,任意⼀个⼆进制浮点数V可以表示成下面的形式:
• (−1)S 表示符号位,当S=0,V为正数;当S=1,V为负数
• M 表示有效数字,M是大于等于1,小于2的
• 2 E 表示指数位
举例来说:
十进制的5.0,写成二进制是 101.0 ,相当于 1.01×2^2 。 那么,按照上面V的格式,可以得出S=0,M=1.01,E=2。
十进制的-5.0,写成二进制是 -101.0 ,相当于 -1.01×2^2 。那么,S=1,M=1.01,E=2。
IEEE 754规定:
对于32位的浮点数,最高的1位存储符号位S,接着的8位存储指数E,剩下的23位存储有效数字M
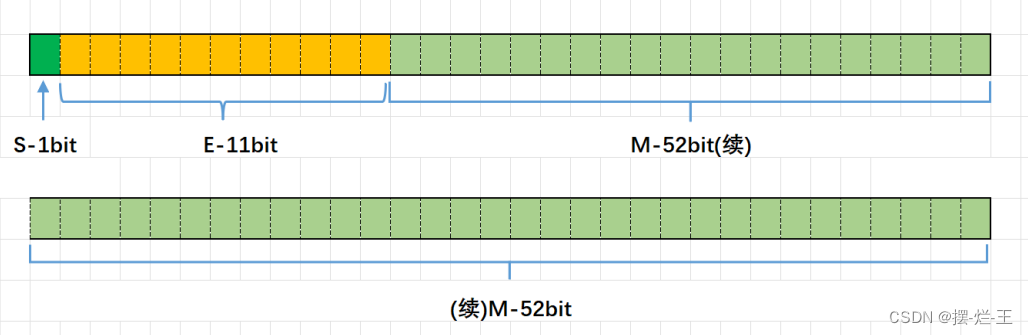
 对于64位的浮点数,最高的1位存储符号位S,接着的11位存储指数E,剩下的52位存储有效数字M
对于64位的浮点数,最高的1位存储符号位S,接着的11位存储指数E,剩下的52位存储有效数字M
3.1.1 浮点数存的过程
IEEE 754对有效数字M和指数E,还有⼀些特别规定。
前面说过, 1≤M<2 ,也就是说,M可以写成 1.xxxxxx 的形式,其中xxxxxx表示小数部分。 IEEE 754规定,在计算机内部保存M时,默认这个数的第⼀位总是1,因此可以被舍去,只保存后⾯的 xxxxxx部分。比如保存1.01的时候,只保存01,等到读取的时候,再把第⼀位的1加上去。这样做的目的,是节省1位有效数字。以32位浮点数为例,留给M只有23位,将第⼀位的1舍去以后,等于可以保存24位有效数字。
对于指数E,它是一个无符号整数。
如果E为8为,则它的取值范围是0~255;如果E为16位,则它的取值范围位0~2047。但是,在科学计数法中是可以出现负数的,所以IEEE 754规定,,存⼊内存时E的真实值必须再加上 ⼀个中间数,对于8位的E,这个中间数是127;对于11位的E,这个中间数是1023。比如,2^10的E是 10,所以保存成32位浮点数时,必须保存成10+127=137,即10001001。
3.1.2 浮点数取的过程
指数E从内存中取出可以分为三种情况:
E不全为0或不全为1
指数E的计算值减去127(或1023),得到真实值,再将有效数字前加上1。
例如,0.5的二进制形式0.1,由于规定整数部分必须为1,所以小数点向右移动一位,则为1.0*2^(-1),其 阶码为-1+127(中间值)=126,表⽰为01111110,⽽尾数1.0去掉整数部分为0,补⻬0到23位,其二进制表示为
0 01111110 00000000000000000000000
E全为0
这时,浮点数的指数E等于1-127(或者1-1023)即为真实值,有效数字M不再加上第⼀位的1,而是还 原为0.xxxxxx的小数。这样做是为了表示±0,以及接近于0的很小的数字。
E全为1
这时,如果有效数字M全为0,表示±无穷大(正负取决于符号位s);
3.2 解析
回到之前提到的题目,为什么 9 还原成浮点数,就成了 0.000000 ?
首先看9是如何存储在内存中的
0000 0000 0000 0000 0000 0000 0000 1001
然后,将 9 的⼆进制序列按照浮点数的形式拆分,得到第一位符号位s=0,后面8位的指数 E=00000000 , 最后23位的有效数字M=000 0000 0000 0000 0000 1001。
由于指数E全为0,所以符合E为全0的情况。因此,浮点数V就写成:
V=(-1)^0 × 0.00000000000000000001001×2^(-126)=1.001×2^(-146)
显然,V是⼀个很⼩的接近于0的正数,所以⽤⼗进制⼩数表⽰就是0.000000。
至于浮点数9.0,为什么整数打印是 1091567616?
首先,浮点数9.0等于二进制1001.0,换算成科学计数法是:1.001×2^3。
所以: 9.0 = (−1) ∗ 0 (1.001) ∗ 23 ,
最后写成二进制形式就是
0 10000010 001 0000 0000 0000 0000 0000
这个32位的⼆进制数,被当做整数来解析的时候,就是整数在内存中的补码,原码正是 1091567616 。
3.3 验证浮点数的存储方式
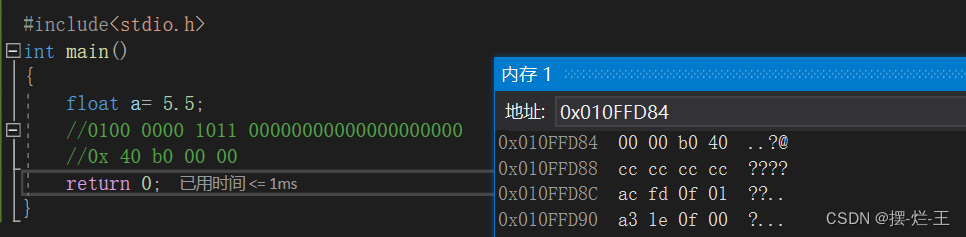
以5.5为例,它的二进制表示为101.1,即1.011*2^2,则S=0,M=1.011,E=2+127=129,
最后写成二进制形式就是
0 10000001 01100000000000000000000
____________________
⭐感谢你的阅读,希望本文能够对你有所帮助。如果你喜欢我的内容,记得点赞关注收藏我的博客,我会继续分享更多的内容。⭐