文章目录
- 1、对象字典
- 2、状态机
- 2.1 控制字(ControlWord、6040h)
- 2.2 状态字(StatusWord、6041h)
- 2.3 shutdown_option_code(605Bh)
- 2.4 disable_operation_option_code(605Ch)
- 2.5 quick_stop_option_code(605Ah)
- 2.6 halt_option_code(605Dh)
- 2.7 fault_reaction_option_code(605Dh)
- 3、Homing模式
- 3.1 回零模式控制字
- 3.2 回零模式状态字
- 3.3 回零模式相关参数
- 3.3.1 home_offset (607Ch)
- 3.3.2 homing_method (6098h)
- 3.3.3 homing_speeds (6099h)
- 3.3.4 homing_acceleration (609Ah)
- 3.4 回零框图
- 3.5 回零方法
- 4、速度控制模式
- 4.1 速度模式控制字
- 4.2 速度模式状态字
- 4.3 速度模式相关参数
- 4.3.1 velocity_sensor_actual_value(6069h)
- 4.3.2 velocity_demand_value(606Bh)
- 4.3.3 velocity_actual_value(606Ch)
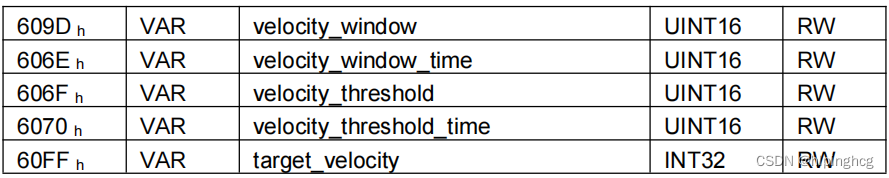
- 4.3.4 velocity_window(609Dh)
- 4.3.5 velocity_window_time(606Eh)
- 4.3.6 velocity_threshold(606Fh)
- 4.3.7 velocity_threshold_time(6070h)
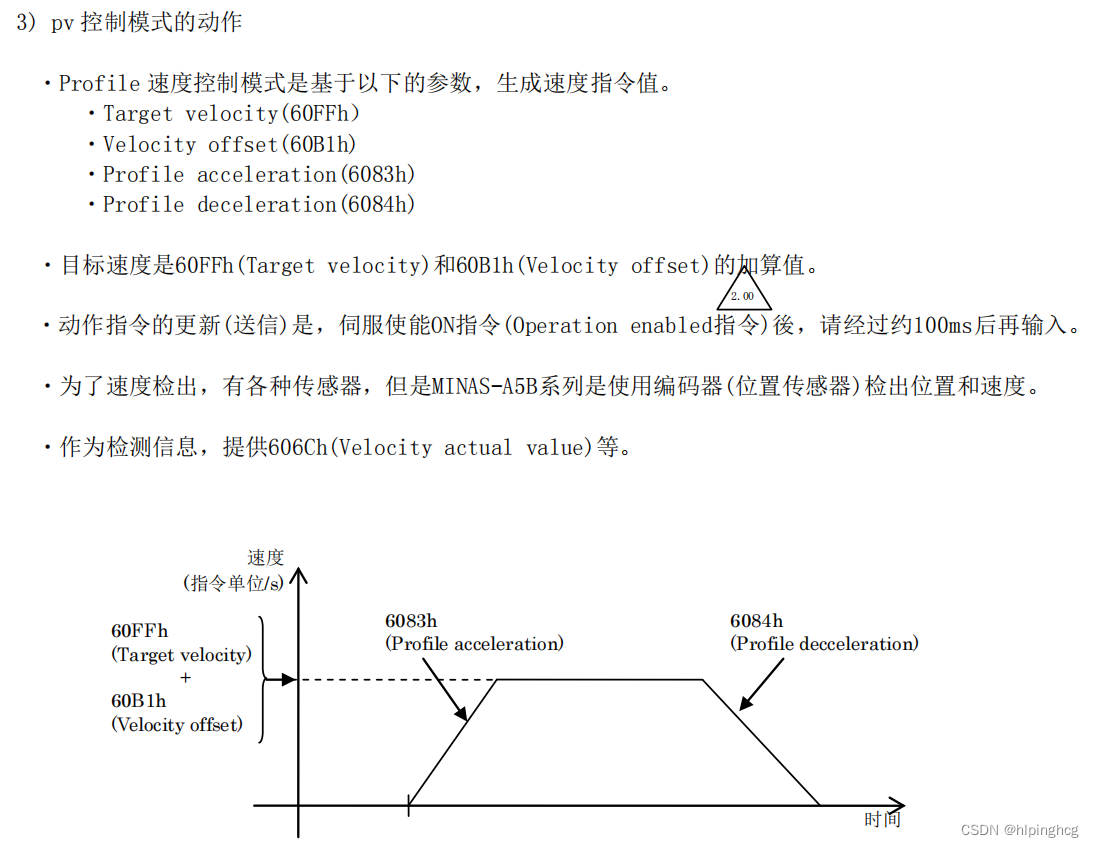
- 4.3.8 target_velocity(60FFh)
- 4.4 速度控制通用框图(PV,CSV)
- 4.5 PV模式控制框图
- 4.5.1 PV模式关联对象(指令,设定类)
- 4.5.2 PV模式和其他模式关联对象
- 4.5.3 PV模式下的控制字
- 4.5.4 PV模式下的状态字
- 4.6 CSV模式控制框图(先预留,后面添加)
- 5、位置控制模式
- 5.1 位置模式控制字
- 5.2 位置模式状态字
- 5.3 位置模式相关参数
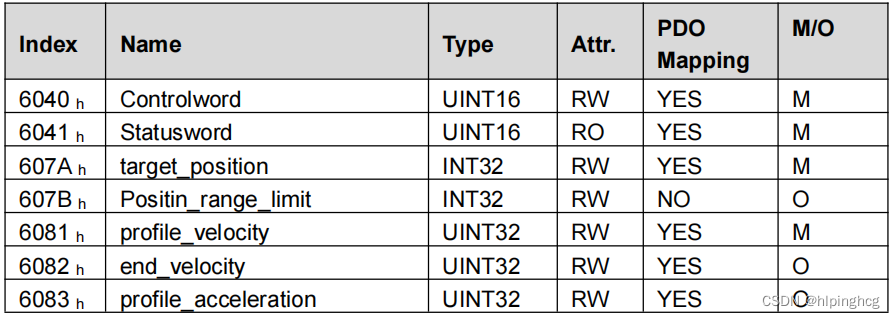
- 5.3.1 target_position(607Ah)
- 5.3.2 profile_velocity(6081h)
- 5.3.3 end_velocity(6082h)
- 5.3.4 profile_acceleration(6083h)
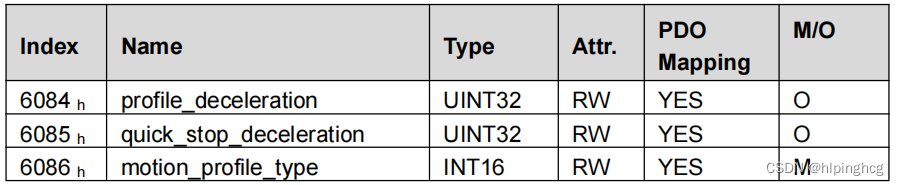
- 5.3.5 profile_deceleration(6084h)
- 5.3.6 quick_stop_deceleration(6085h)
- 5.3.7 motion_profile_type(6086h)
- 5.4 位置模式通用控制框图(PP,CSP,IP,HM)
- 5.5 Profile位置控制模式(PP Mode)
- 5.5.1 功能描述
- 5.5.1.1 单步设定方法
- 5.5.1.2 连续设定方法
- 5.5.2 PP控制模式的动作
- 5.6 位置插补控制模式(IP mode,Interpolation Position Mode)
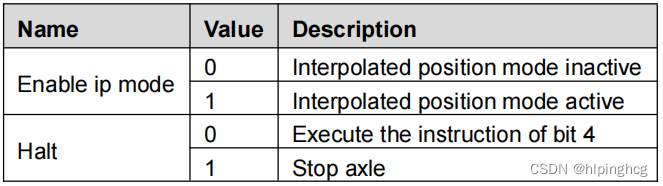
- 5.6.1 控制字
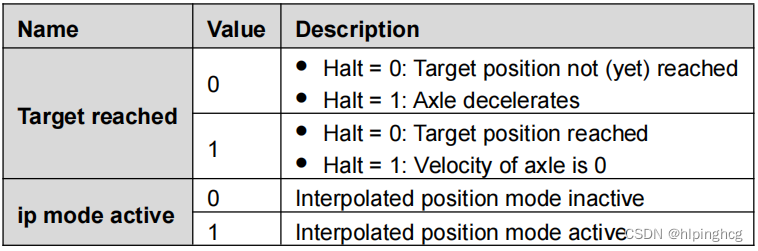
- 5.6.2 状态字
- 5.6.3 相关参数
- 5.6.3.1 Interpolation sub mode select(60C0h)
- 5.6.3.2 Interpolation data record(60C1h)
- 5.6.3.3 Interpolation time period(60C2h)
- 5.7周期性同步位置控制模式(Cyclic Synchronous Position Mode)
- 6 转矩控制模式
- 6.1 转矩控制相关参数
- 6.1.1 Target Torque(6071h)
- 6.1.2 Max Torque(6072h)
- 6.1.3 Torque Slope(6087h)
- 6.1.4 Torque offset(60B2h)
- 6.1.5 Torque demand(6074h)
- 6.1.6 Motor rated current(6075h)
- 6.1.7 Motor rated Torque(6076h)
- 6.1.8 Torque actual value(6077h)
- 6.1.9 Current actual value(6078h)
- 6.2 转矩控制通用框图
- 6.3 Profile转矩控制模式(pt mode)
- 6.3.1 PT控制模式的动作
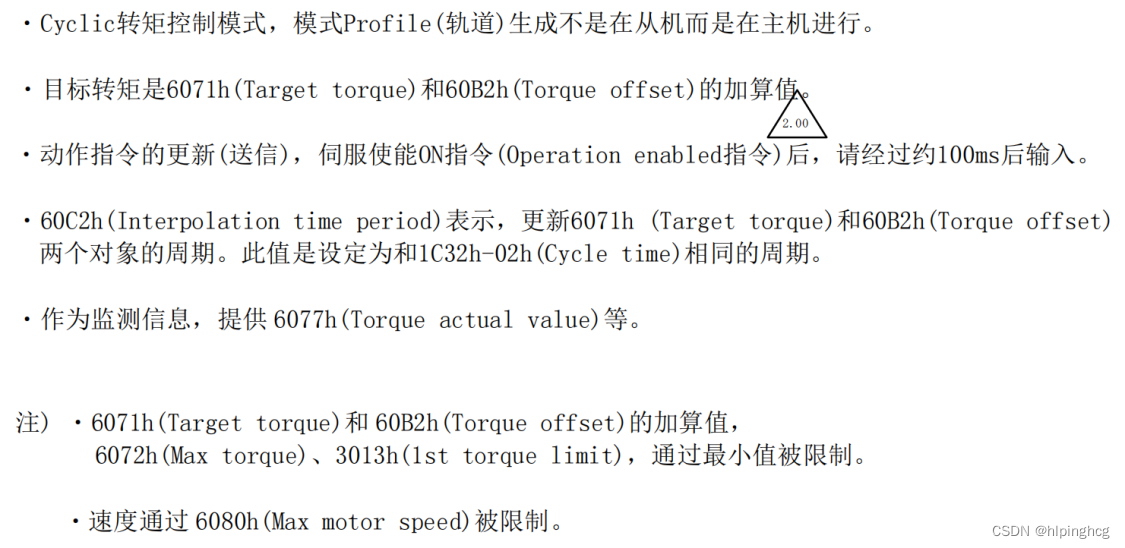
- 6.4 周期性同步转矩控制模式(CST Mode)
- 6.4.1 CST控制模式的动作
伺服电机的几种常用模式及控制模式的设置(DS402):
https://blog.csdn.net/weixin_43455581/article/details/107808610
CANopen笔记3 – DS402运动控制子协议:
https://www.cnblogs.com/21207-iHome/p/6047469.html
1、对象字典
驱动器使用 —— DS402状态切换(个人笔记):
https://blog.csdn.net/weixin_43455581/article/details/103661372

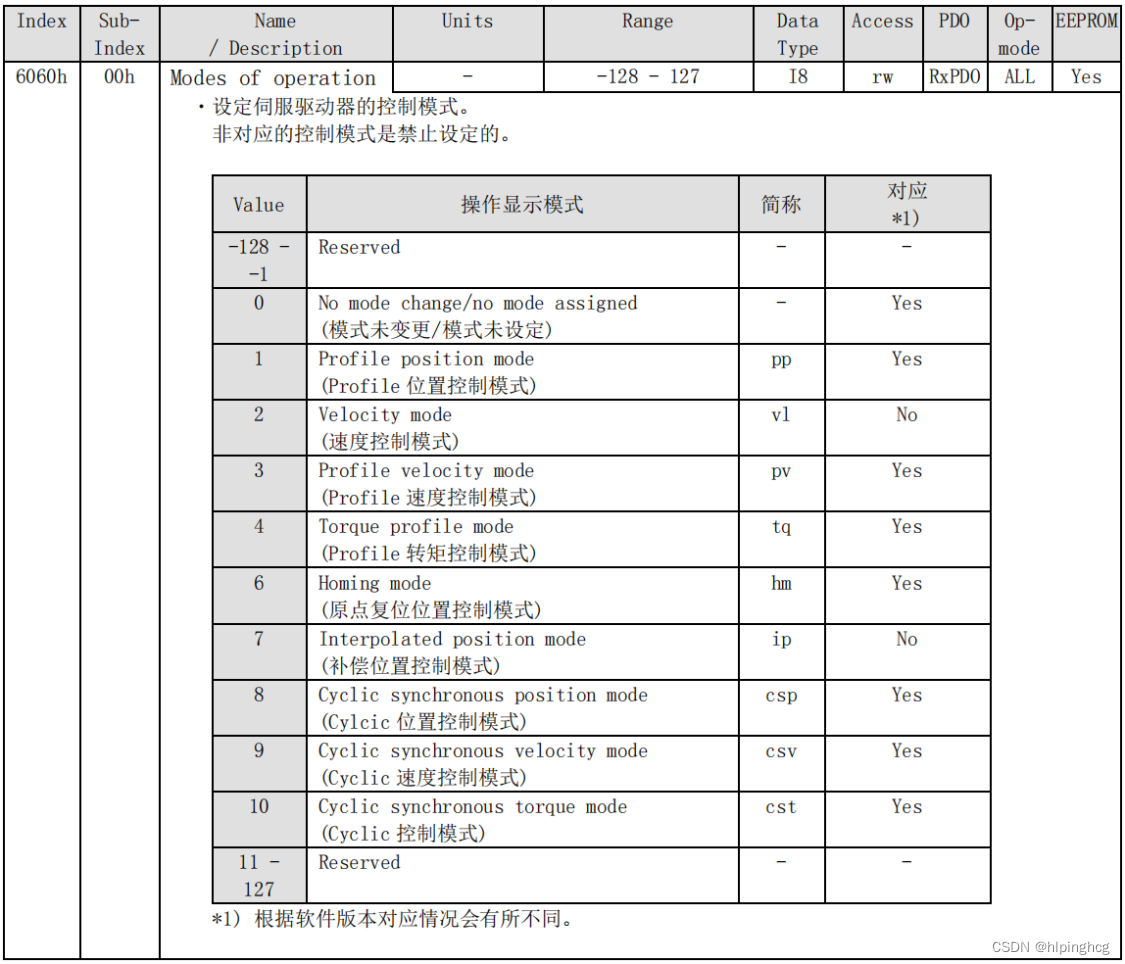
1.1 Mode of Operation( 606 0 h 6060_h 6060h)
1.2 Modes of opration display( 606 1 h ) 6061_h) 6061h)
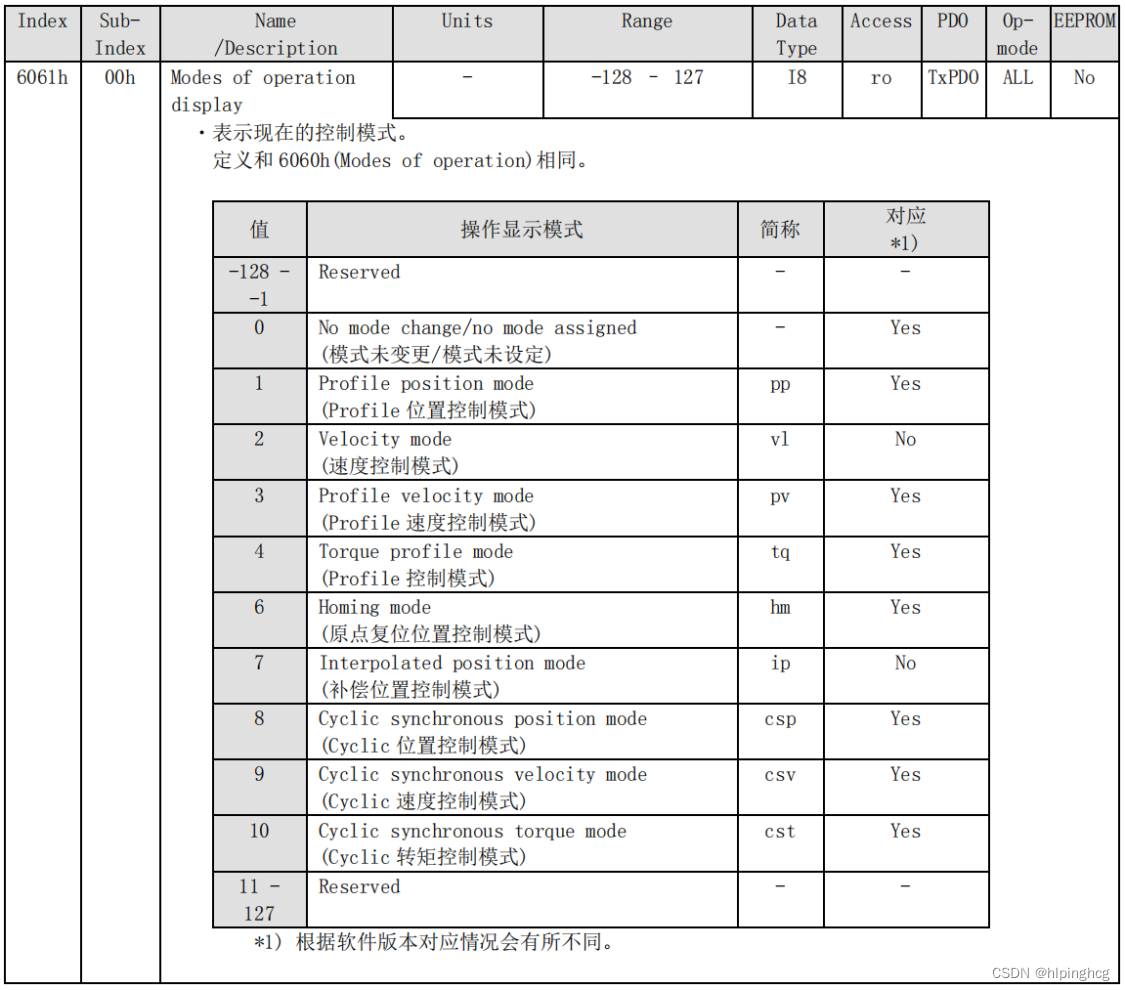
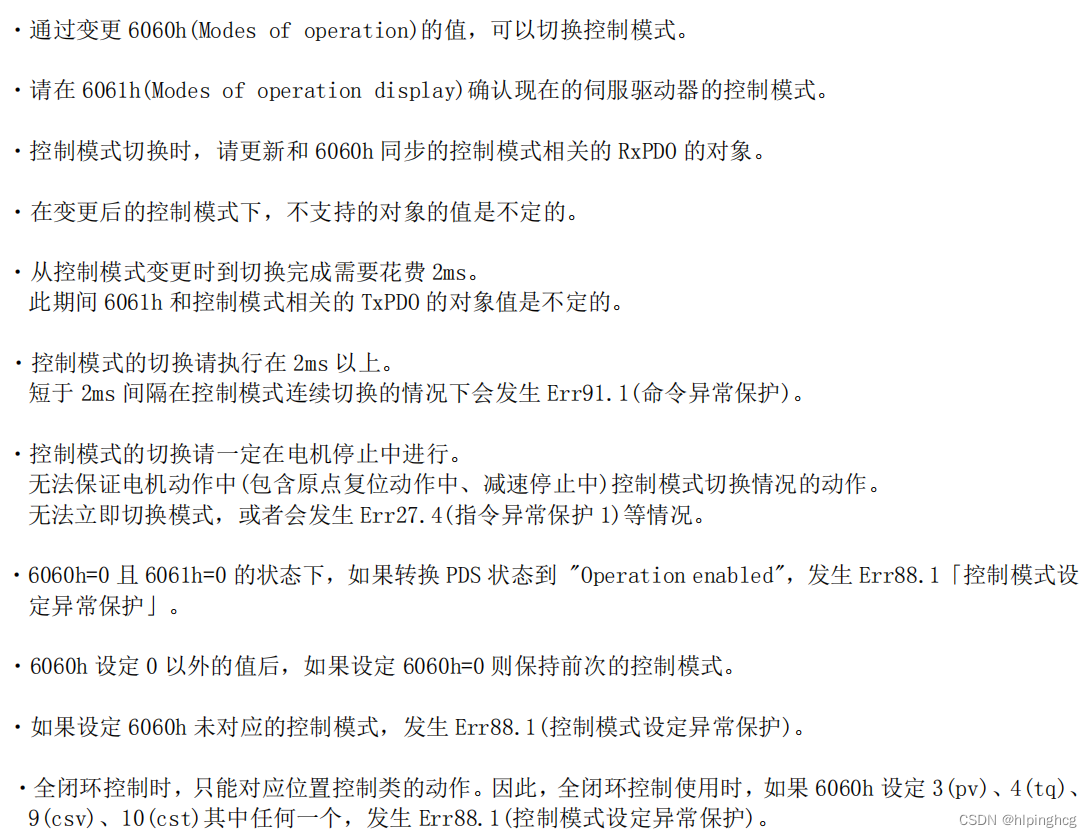
切换模式注意事项:
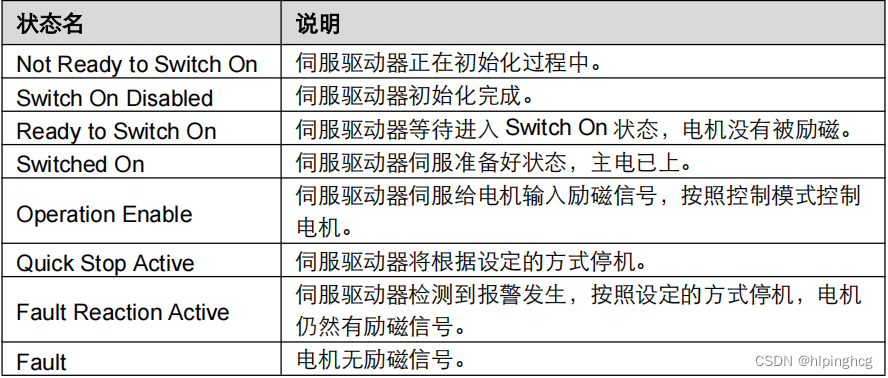
2、状态机
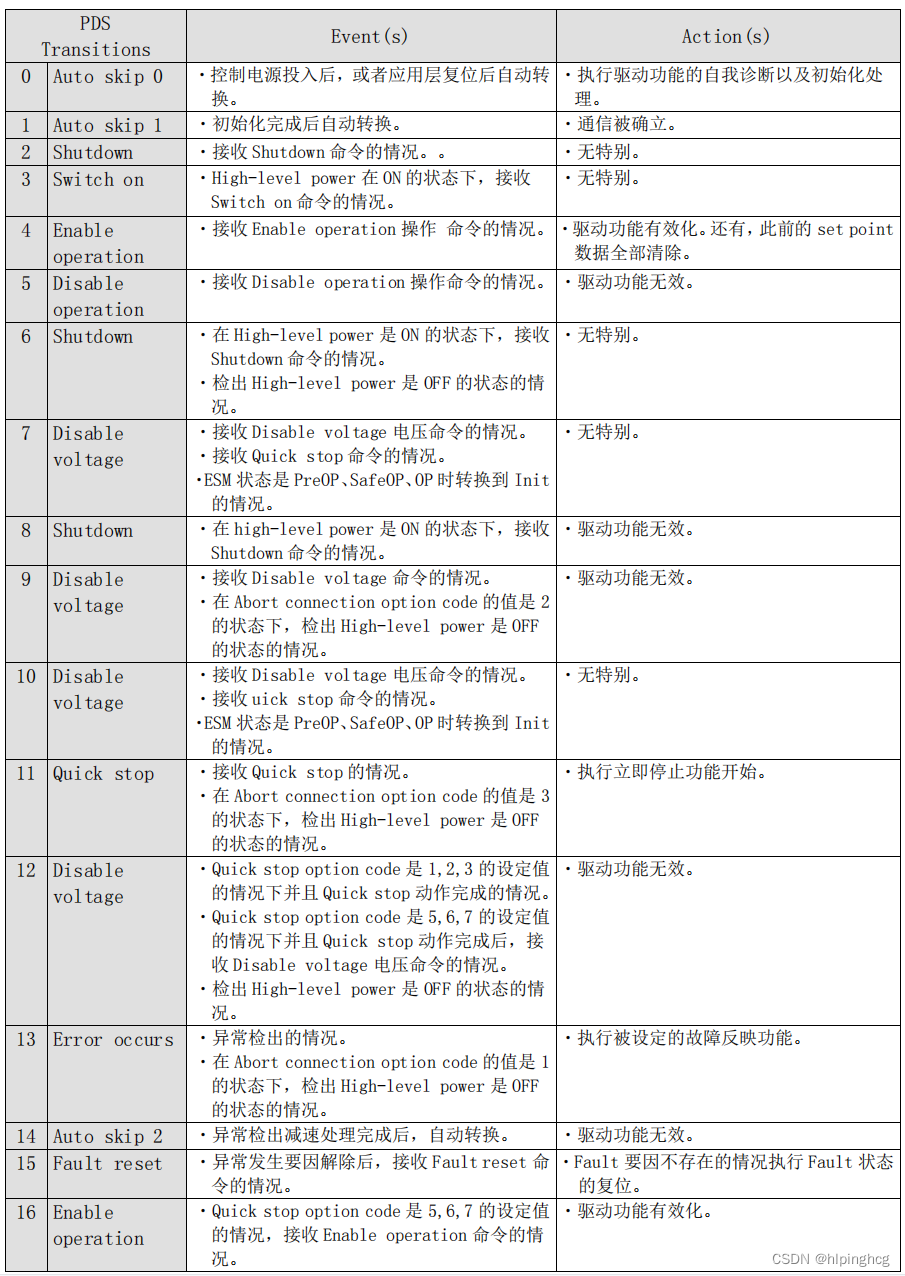
说明:
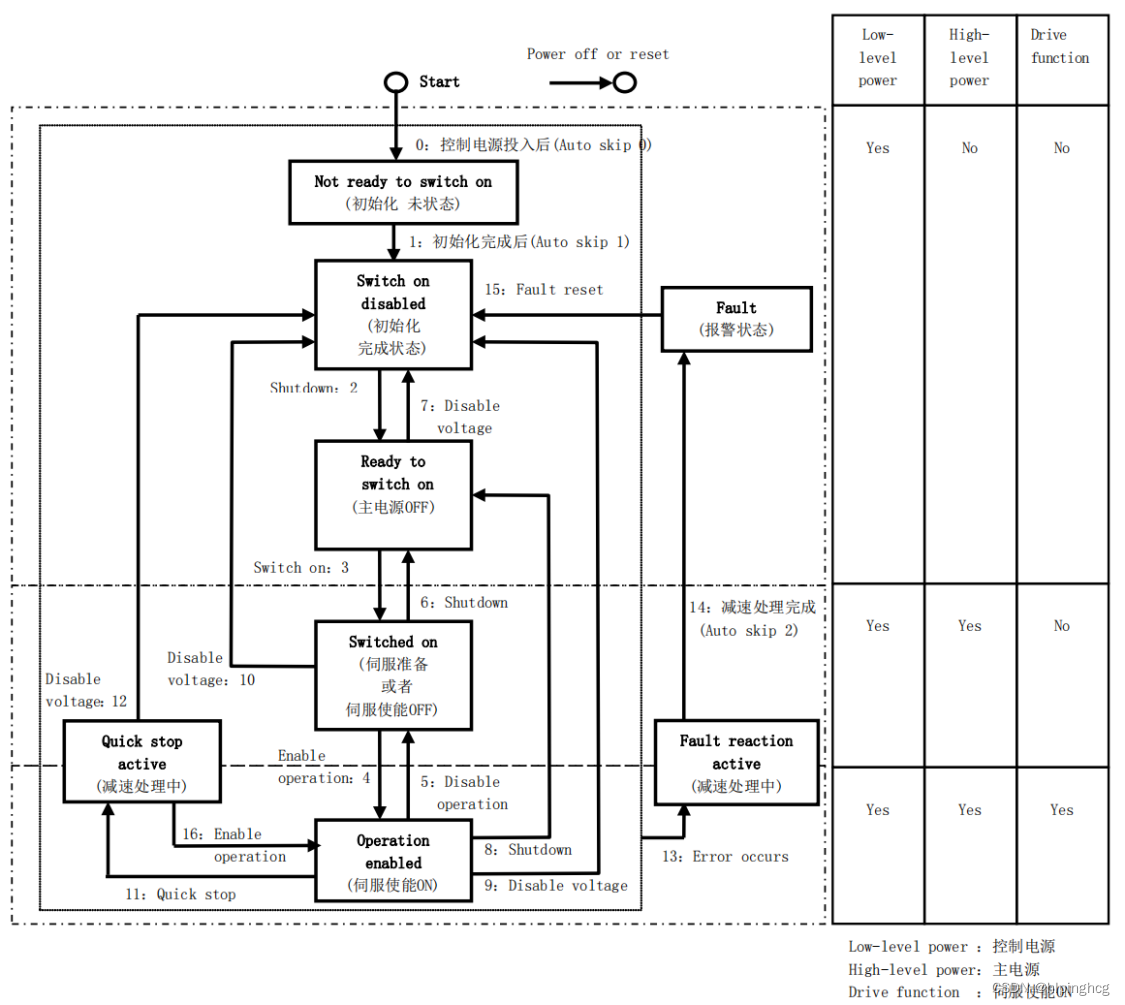
● 状态字(0x6041)在 OP 状态与 Safe-Op 下才被更新传送
● 控制字(0x6040) 在 OP 状态才被从站读取
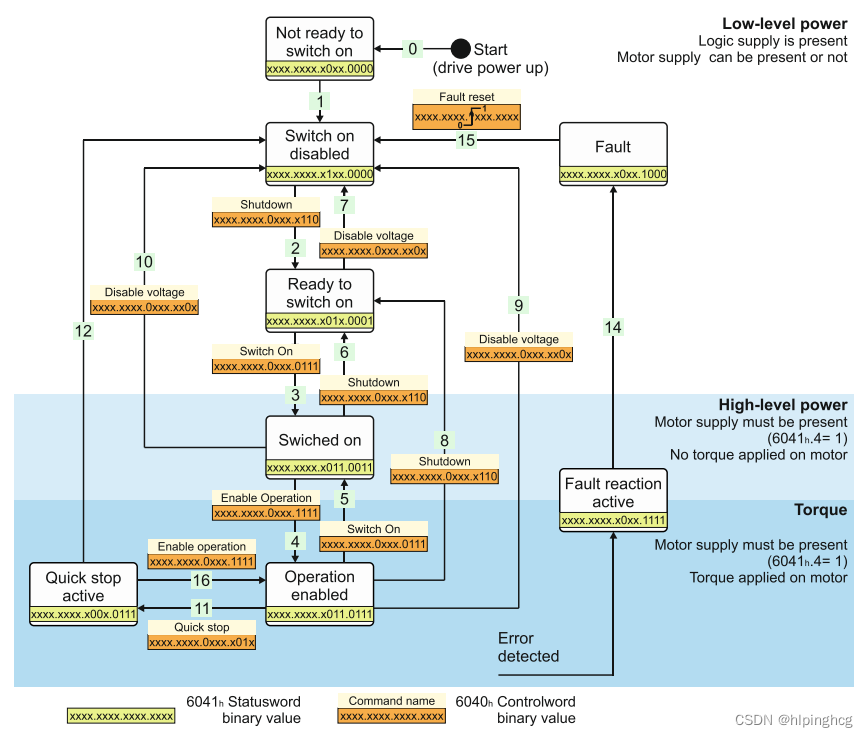
如上图所示,状态机可以分成三部分:“Power Disabled”(主电关闭)、“Power Enabled”(主电打开)和“Fault”。所有状态在发生报警后均进入“Fault”。在上电后,驱 动器完成初始化,然后进入 SWITCH_ON_DISABLED 状态。可以对驱动器进行配置(例 如,将驱动器的工作模式设置成“PP”模式)。
此时,主电仍然关闭,电机没有被励磁。经过 State Transition(状态传输)2、3、4 后,进入 OPERATION ENABLE。此时,主电已开启,驱动器根据配置的工作模式控制电机。因此,在该状态之前必须先确认已经正确配置了驱动器的参数和相应的输入值为零。State Transition(状态传输)9 完成关闭电路主电。一旦驱动器发生报警,驱动器的状态都进入 FAULT。
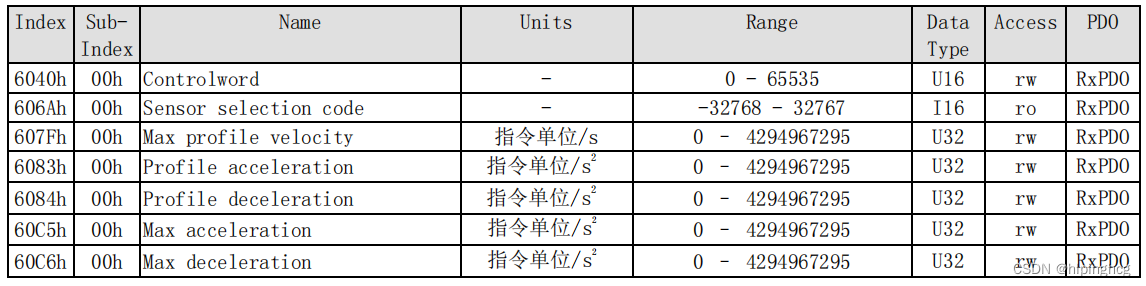
相关对象字典:
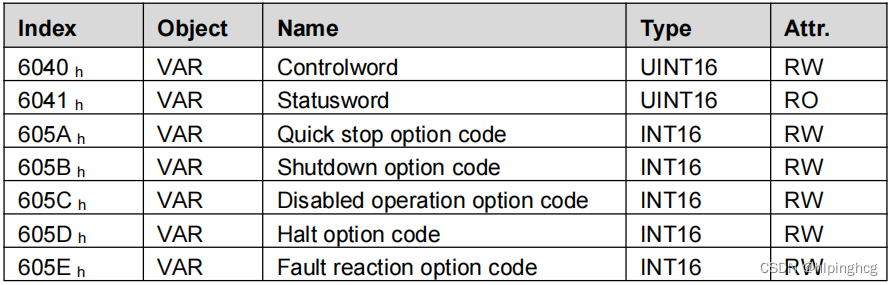
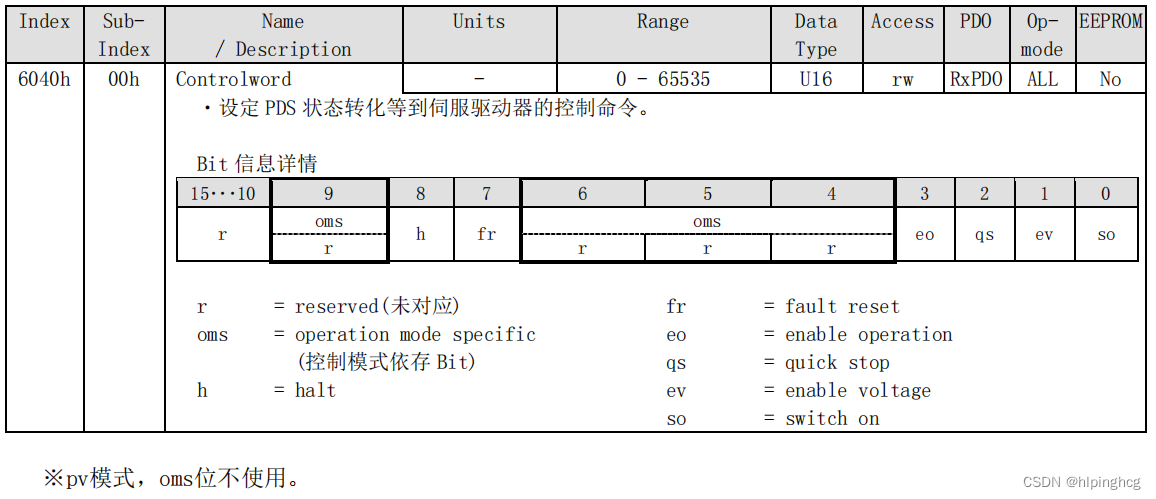
2.1 控制字(ControlWord、6040h)

● Bit0 ~ 3 和 Bit7:
状态机的传输由这 5 位组成的相应控制命令触发。
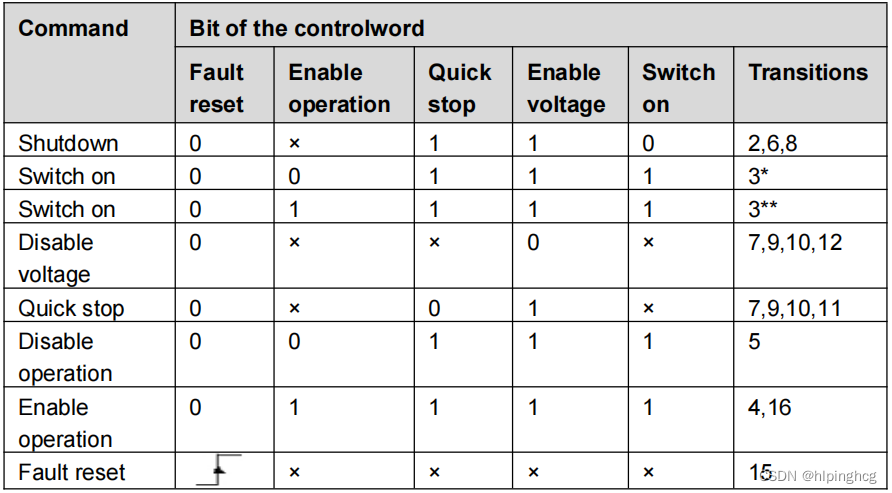
注:表中 X 表示该位可以被忽略
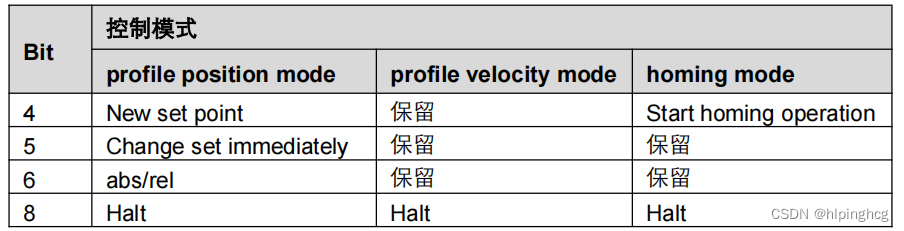
● Bit4、5、6、8:
这 4 位在不同控制模式下,定义不同。
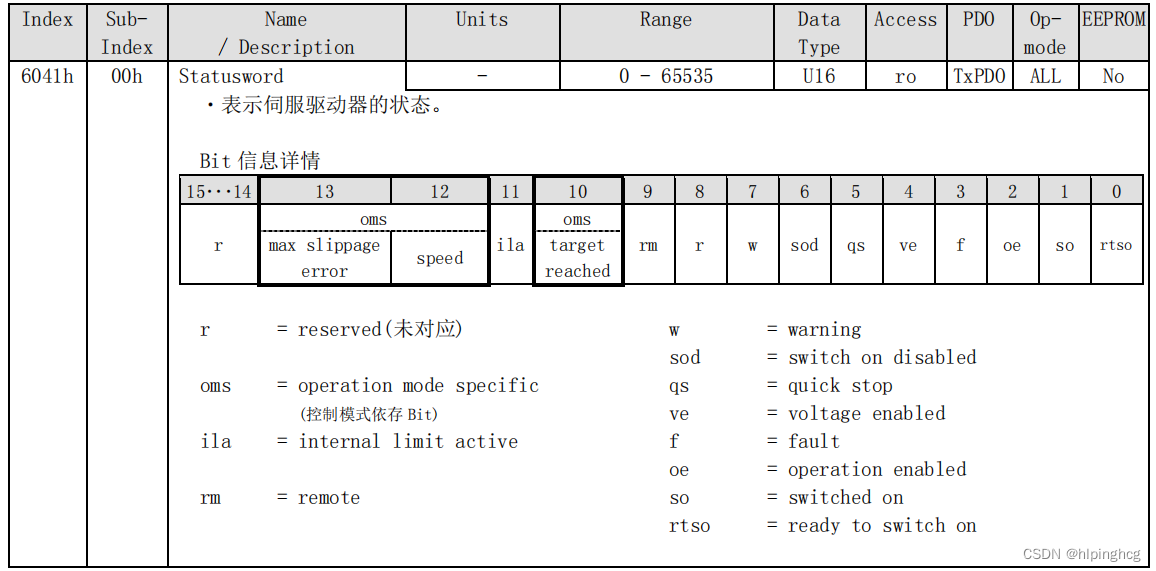
2.2 状态字(StatusWord、6041h)
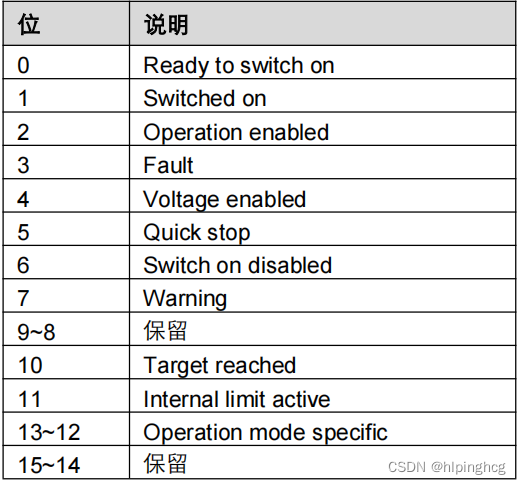
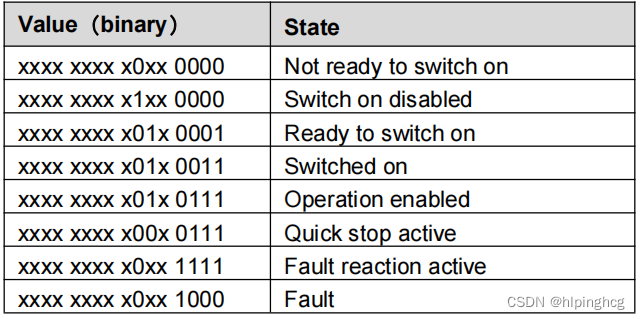
● Bit0 ~ 3 、Bit5 和 Bit6:
这几位的组合表示驱动器所处的状态。
● Bit4:Voltage enabled
当该位为 1 时,表示主电已上。
● Bit5:Quick stop
当该位为 0 时,表示驱动器将按照设置(605A h:quick_stop_option_code)
停机。
● Bit7:Warning
当该位为 1 时,表示驱动器检测到报警。
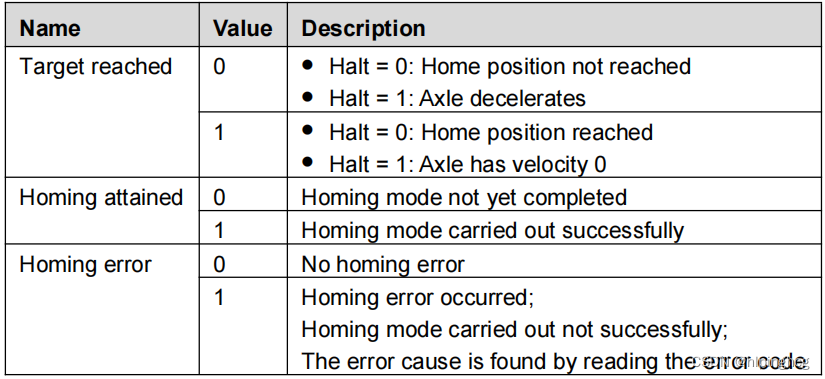
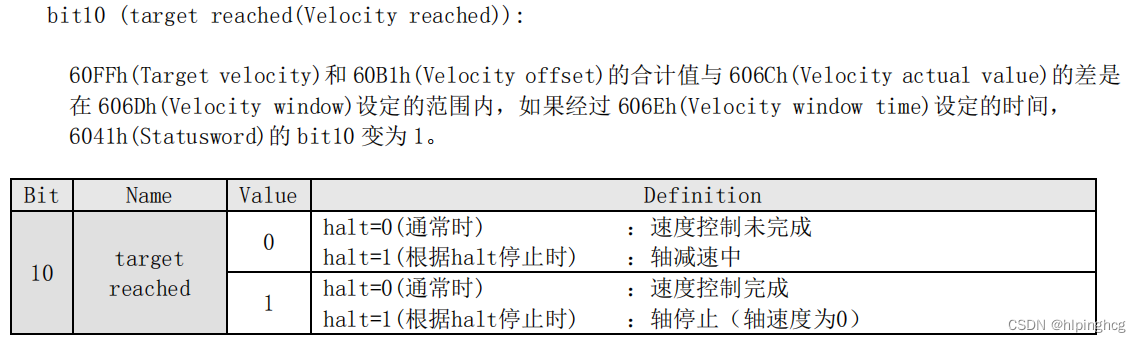
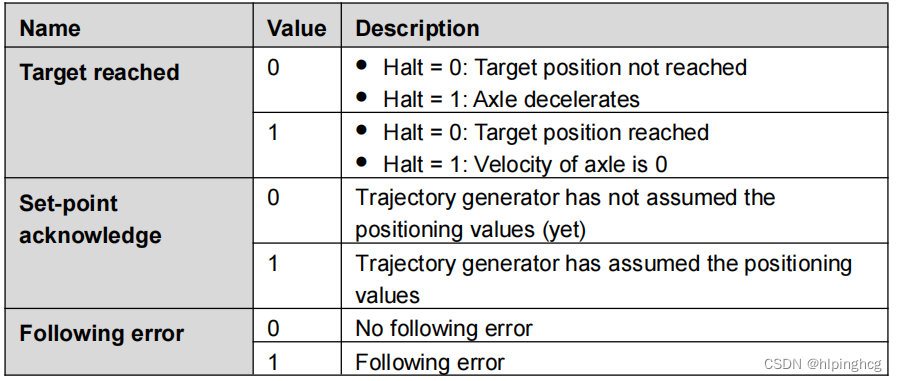
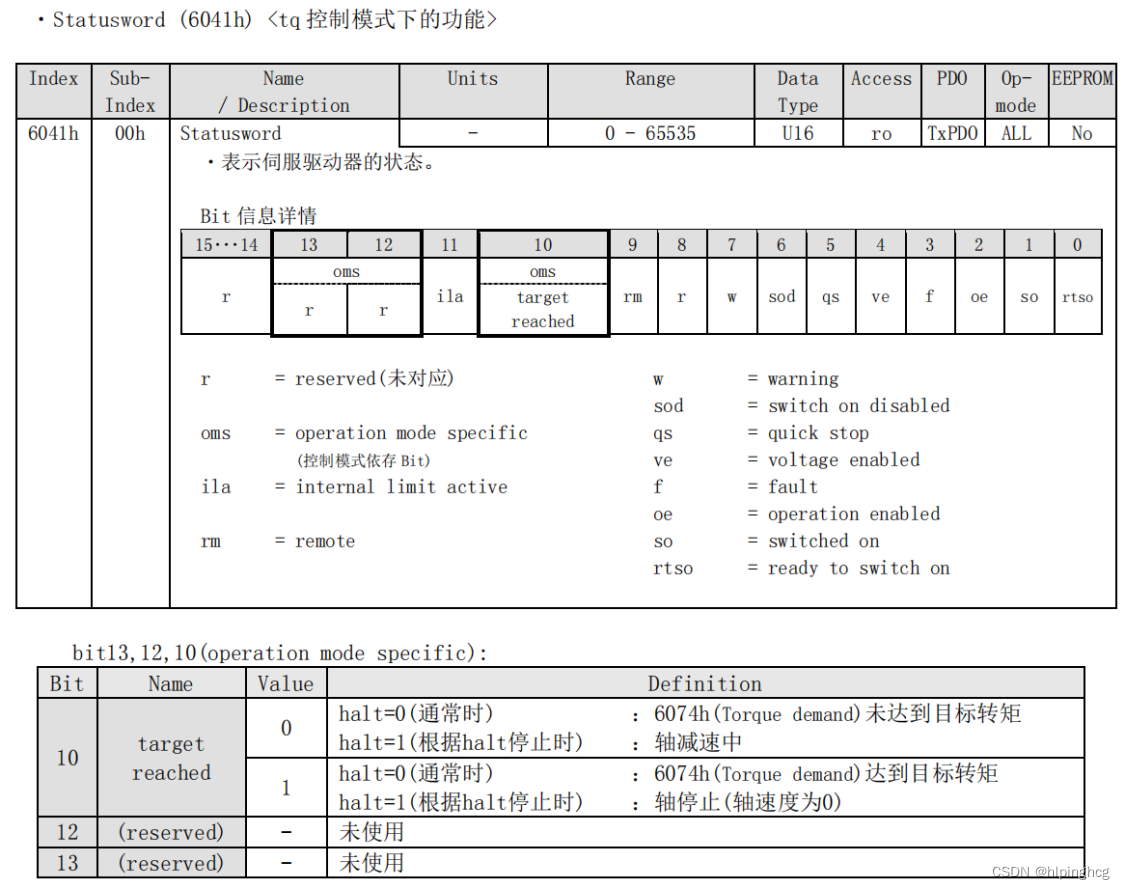
● Bit10:Target reached
该位在不同控制模式下,含义不同。
Profile Position Mode 时,当设定位置到达后,该位将被置位;当 Halt 启动,
速度减速到零后,该位将被置位;当新的位置设定后,该位将被清除。
Profile Velocity Mode 时,当速度到达给定速度后,该位将被置位;当 Halt 启
动,速度减速到零后,该位将被置位。
● Bit11:Internal limit active
当该位为 1 时,表示内部转矩超过设定值。
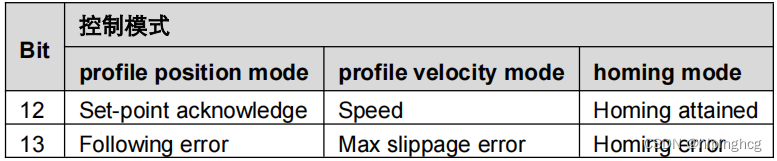
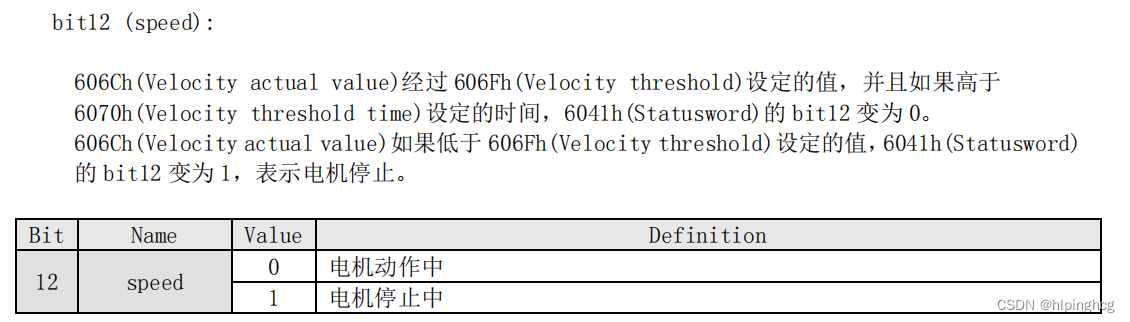
● Bit12、13:
该 2 位在不同控制模式下,含义不同。
2.3 shutdown_option_code(605Bh)
当发生 Operation Enable → Ready to Switch On 状态转移时,
shutdown_option_code 决定如何停机。.

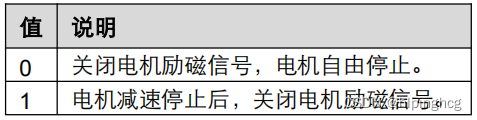
2.4 disable_operation_option_code(605Ch)
当发生 Operation Enable → Switched On 状态转移时,Disable operation option
code 决定如何停机。
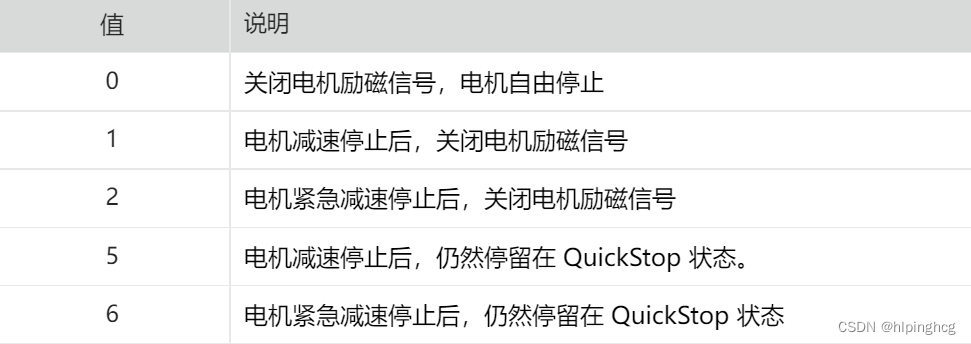
2.5 quick_stop_option_code(605Ah)
当发生 Operation Enable → Quick Reaction Active 状态转移时,
quick_stop_option_code 决定如何停机。
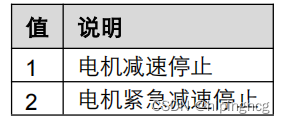
2.6 halt_option_code(605Dh)
当 Controlword 的 bit8(halt)为 1 时,halt option code 决定如何停机。
2.7 fault_reaction_option_code(605Dh)

3、Homing模式
如果电机使用的是增量编码器,那么可以选择通过 C 脉冲的回零方式;如果电 机使用的是串行编码器或旋转变压器,那么就不能选择通过 C 脉冲的回零方式。
用户可以设置回零方式、回零的速度和加速度。驱动器在找到参考点位置后,可以 设置零位位置向前偏移该参考点 home_offset(607C h)距离。
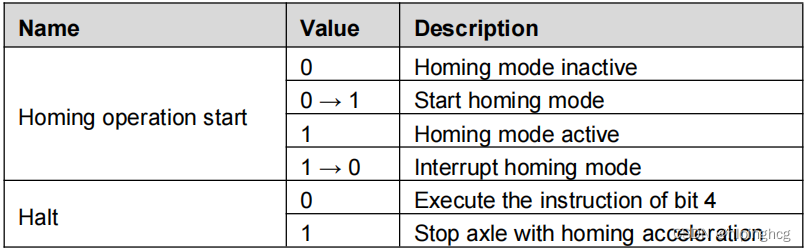
3.1 回零模式控制字
3.2 回零模式状态字

3.3 回零模式相关参数
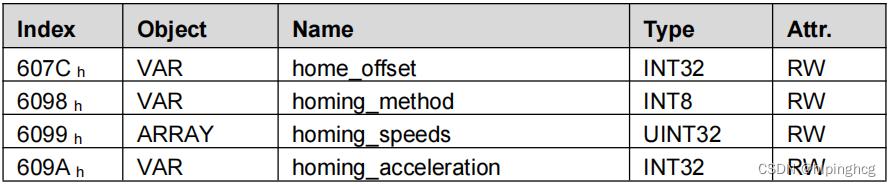
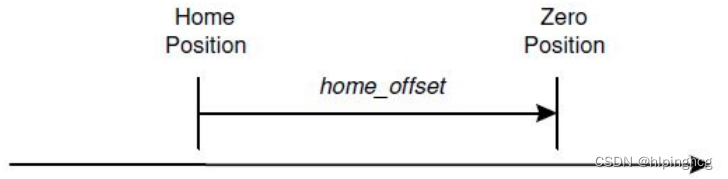
3.3.1 home_offset (607Ch)
home_offset 参数确定了参考点位置与零位之间的距离。
3.3.2 homing_method (6098h)
有 4 种信号可作为回零信号:正限位开关、负限位开关、参考点开关和 C 脉冲。
3.3.3 homing_speeds (6099h)
找参考点需要 2 种速度:找参考点速度和找零位速度。
子索引1:speed_during_search_for_switch
子索引2:speed_during_search_for_zero
3.3.4 homing_acceleration (609Ah)
回零期间的加速度和减速度,均是 homing_acceleration。
3.4 回零框图

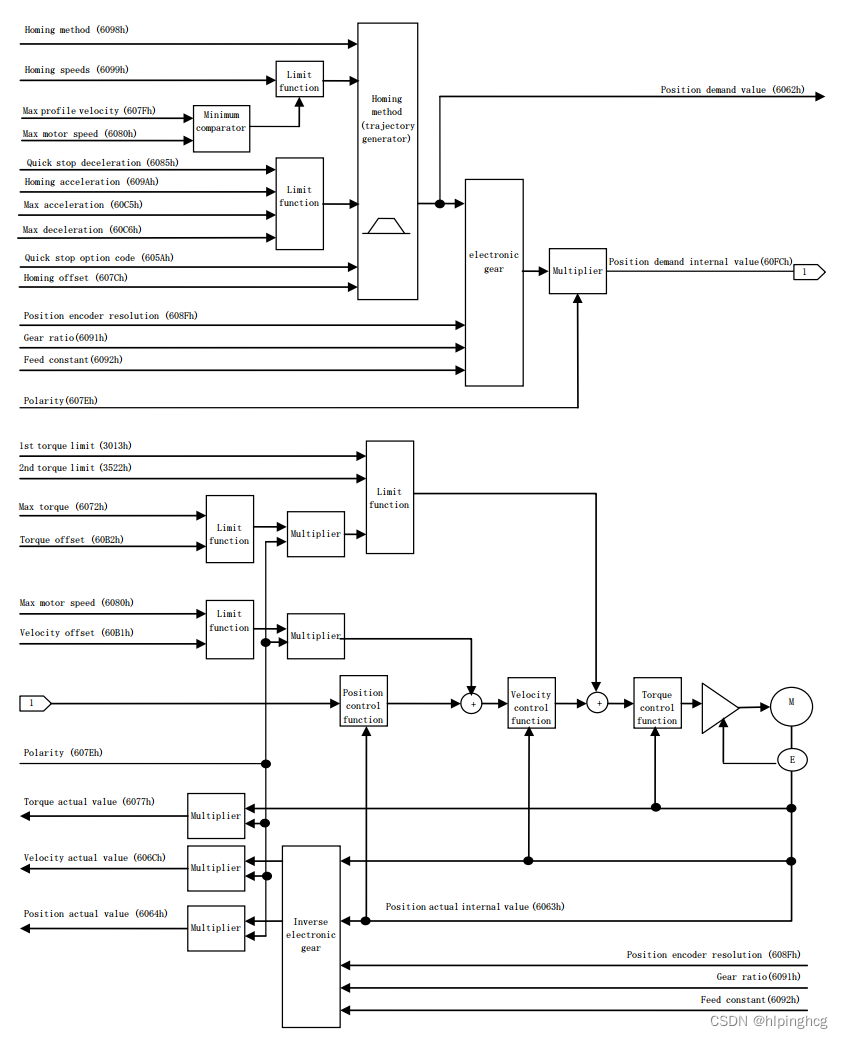
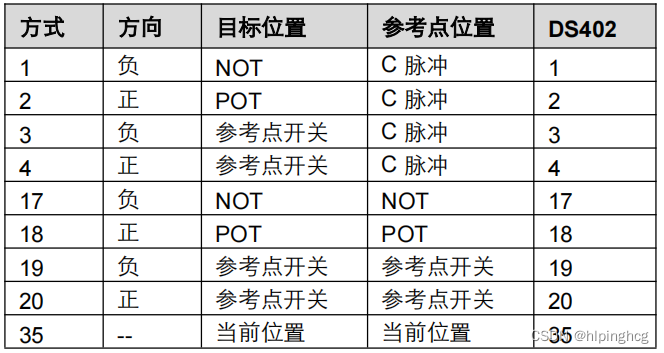
3.5 回零方法
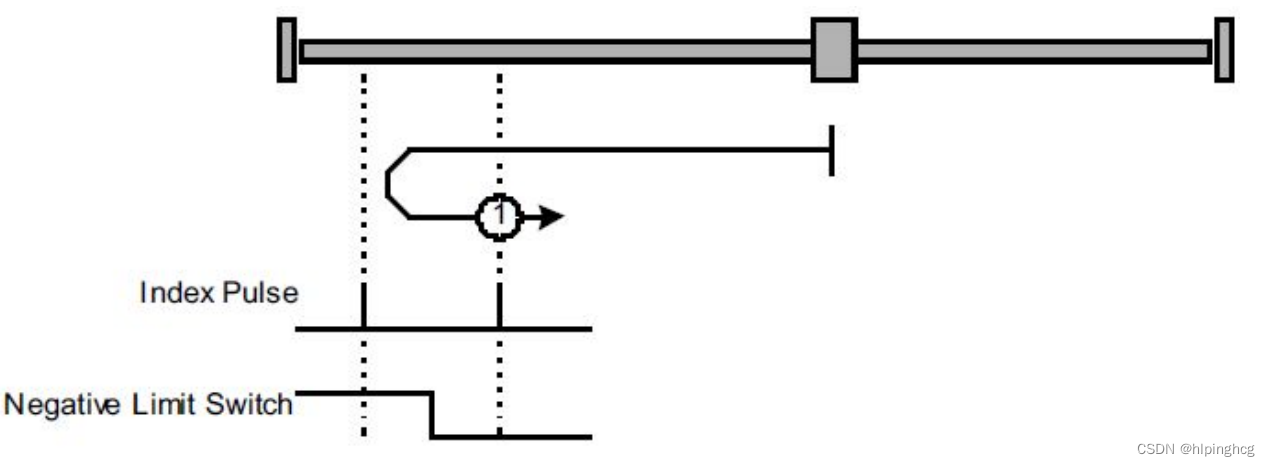
● 方法 1:使用 C 脉冲和负限位开关
驱动器首先较快的向负方向移动,到达负限位开关(N-OT)才减速停止;然 后驱动器慢速返回,寻找目标零位位置。本回零方法的目标零位位置是离开限位开关后编码器的第一个 C 脉冲位置。
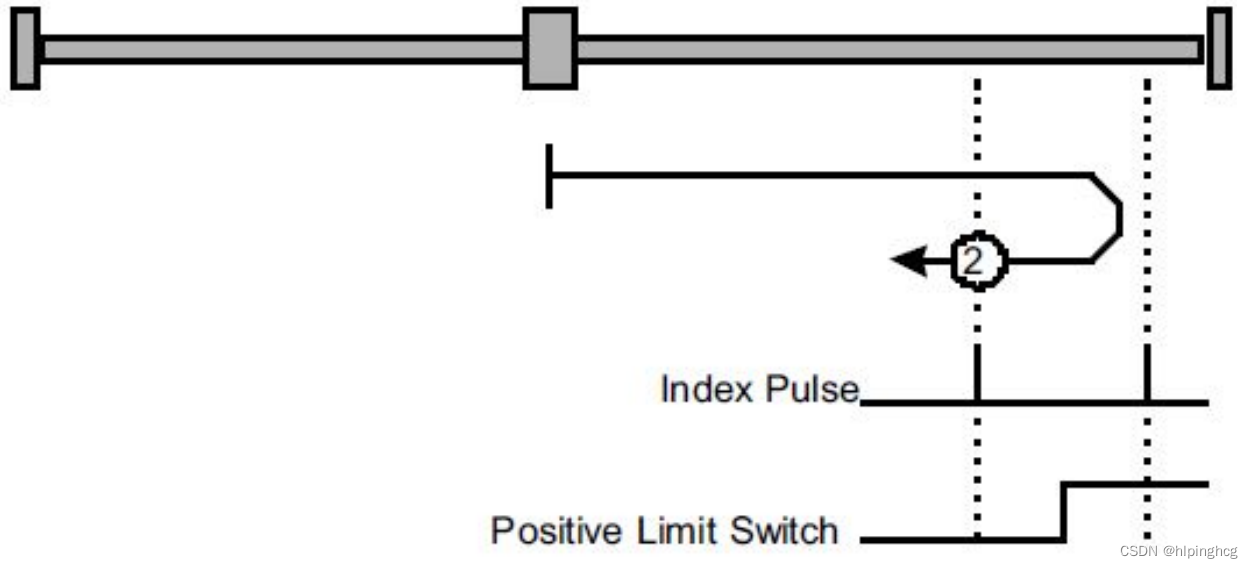
● 方法 2:使用 C 脉冲和正限位开关
驱动器首先较快的向正方向移动,到达正限位开关(P-OT)才减速停止;然 后驱动器慢速返回,寻找目标零位位置。本回零方法的目标零位位置是离开限 位开关后编码器的第一个 C 脉冲位置。
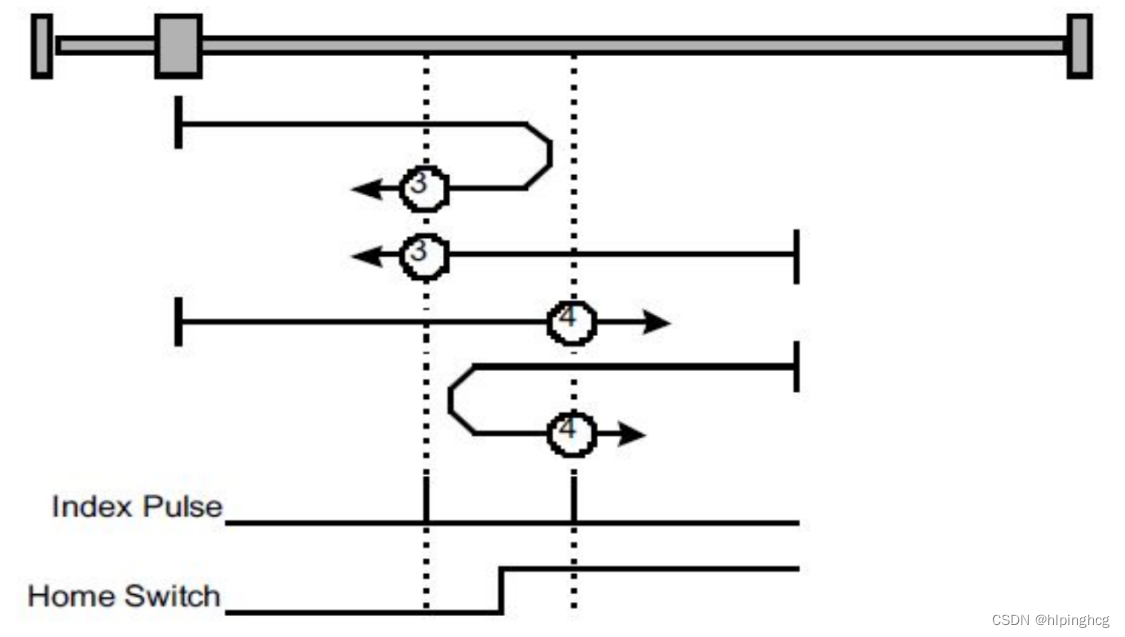
● 方法 3 和 4:使用 C 脉冲和参考点开关
驱动器初始方向移动依赖于参考点开关状态。目标零位位置是参考点开关左边 或右边的第一个 C 脉冲位置。
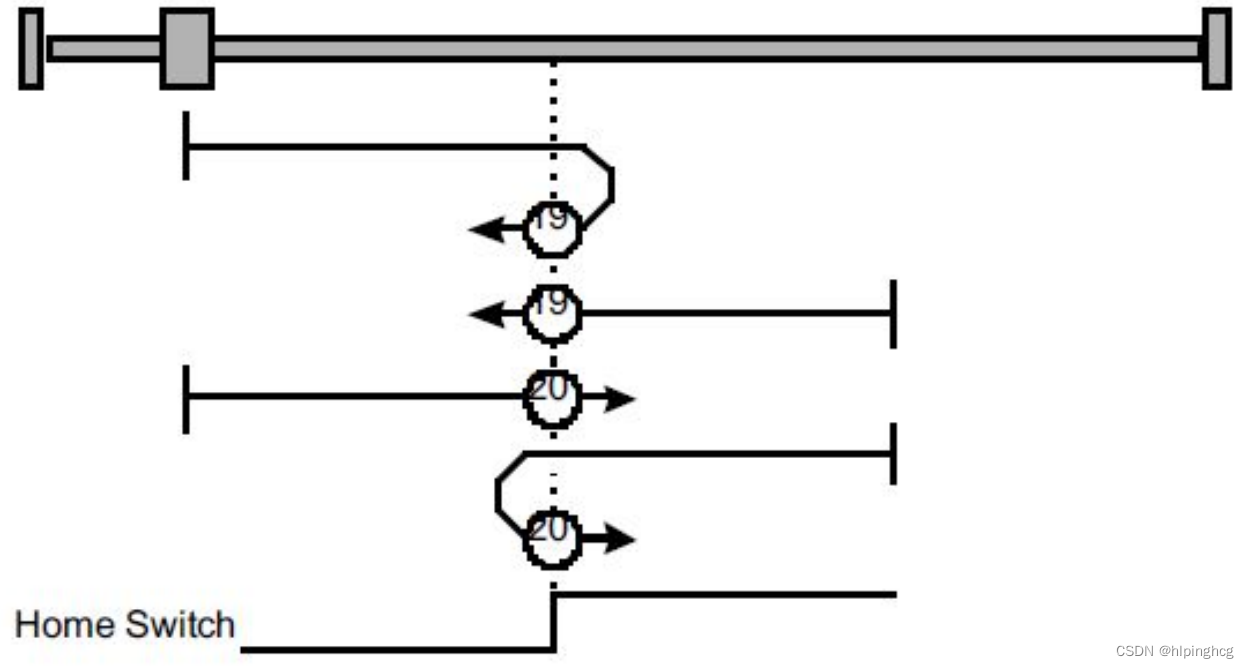
● 方法 17 ~ 20:不使用 C 脉冲
这 4 种回零方法分别类似方法 1~4,只是目标零位位置不再使用 C 脉冲,而 依赖限位开关或参考点开关的变化。例,如下图所示方法 19 和 20 回零方法 分别类似方法 3~4。
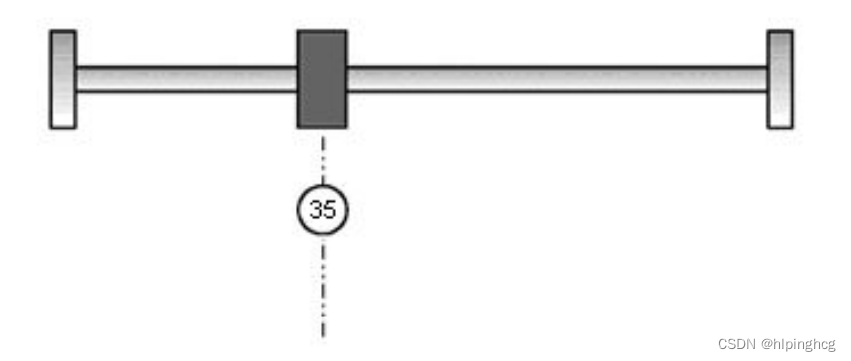
● 方法 35:当前位置为零点
当前位置即为系统零点。
4、速度控制模式
4.1 速度模式控制字


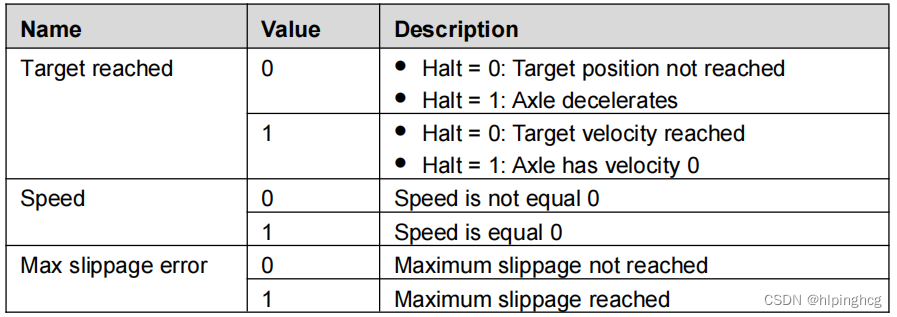
4.2 速度模式状态字

4.3 速度模式相关参数
4.3.1 velocity_sensor_actual_value(6069h)
主站可以通过读 velocity_sensor_actual_value 参数确定电机当前转速,该参数单 位是内部速度单位(0.1rmps)。
4.3.2 velocity_demand_value(606Bh)
主站可以通过读 velocity_demand_value 参数确定驱动器当前给定速度值,该参数 单位是用户速度单位。
4.3.3 velocity_actual_value(606Ch)
主站可以通过读 velocity_ actual _value 参数确定电机当前转速,该参数单位是用 户速度单位。
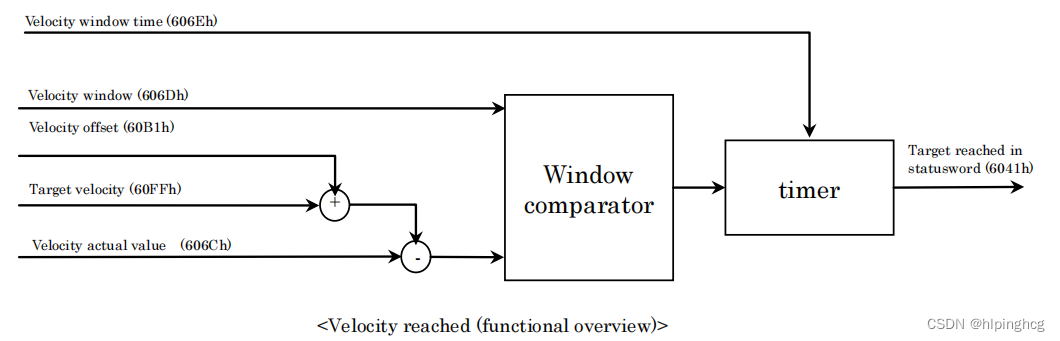
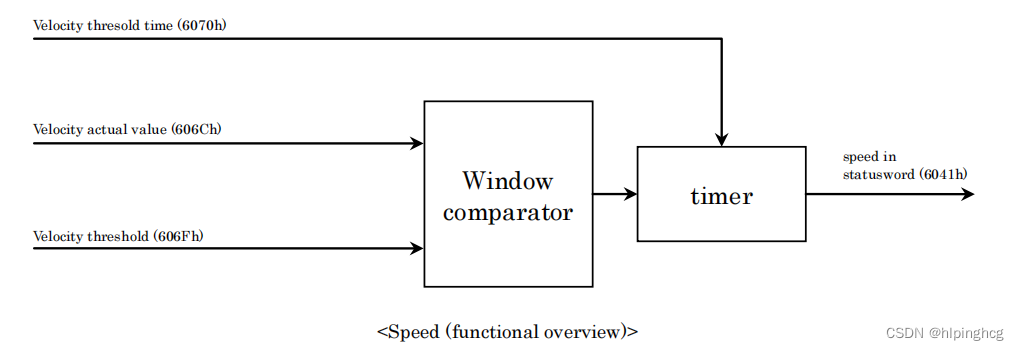
4.3.4 velocity_window(609Dh)
velocity_actual_value(606C h)和 target_velocity(60FF h)的差值被定义为实际速度误差窗口。如果实际速度误差窗口在 velocity_window_time(606E h)参数设置 的时间内一直比 velocity_window(606D h)小,那么 statusword 的 bit10 (target_reached)将被置位,表示设定速度到达。
4.3.5 velocity_window_time(606Eh)
velocity_window_time 参数和 velocity_window 参数一起组成速度窗口比较器。
4.3.6 velocity_threshold(606Fh)
velocity_threshold(阀值速度)指接近零速度的一个范围,用以判断电机是否停止。
4.3.7 velocity_threshold_time(6070h)
velocity_threshold_time(阀值速度时间)设置电机在低于阀值速度时的最短时间, 单位:ms。当电机速度低于阀值速度的时间超过阀值速度时间时,状态字 bit12(速度为零)将被置 1。
4.3.8 target_velocity(60FFh)
target_velocity 是给定目标速度。
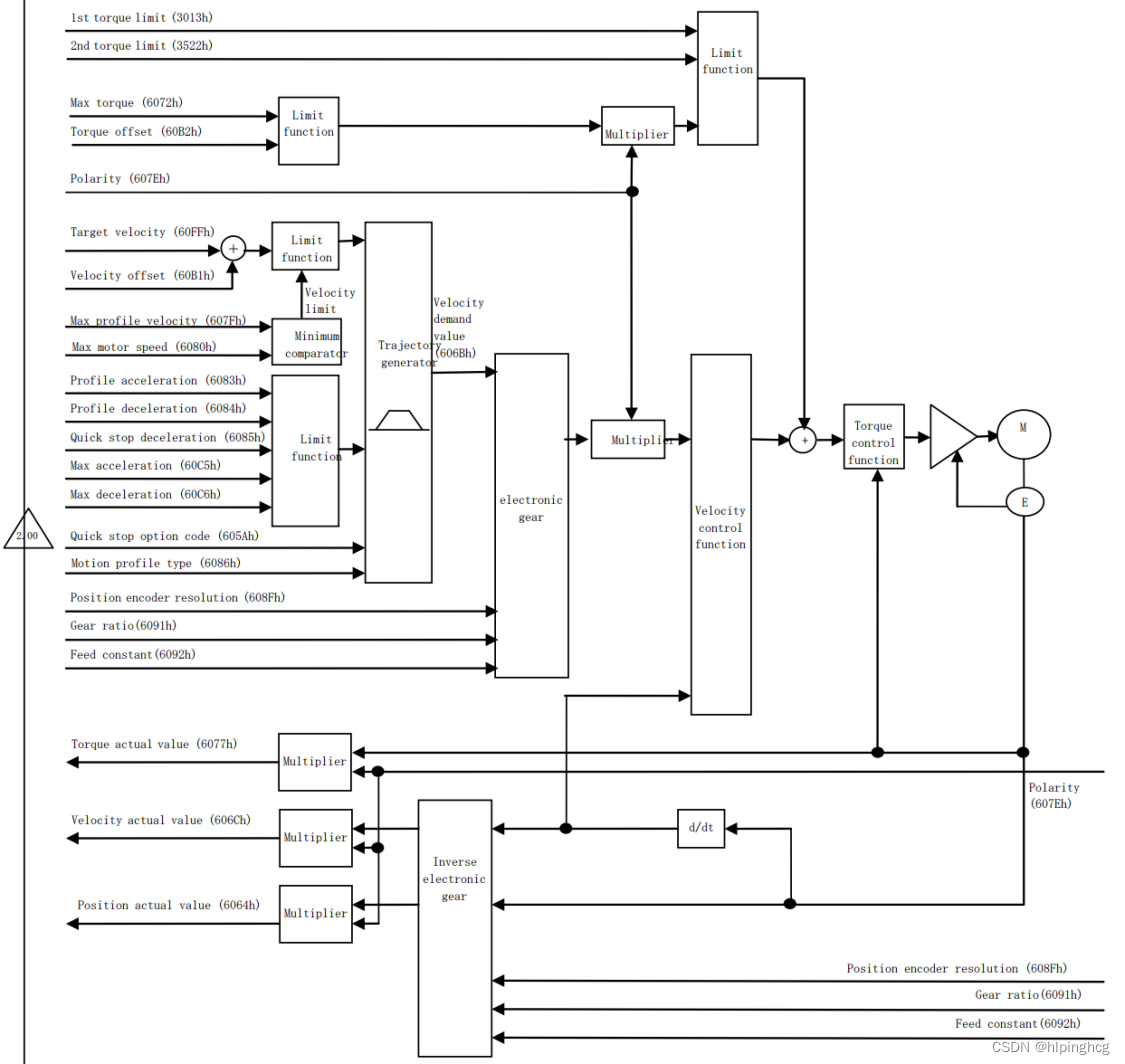
4.4 速度控制通用框图(PV,CSV)
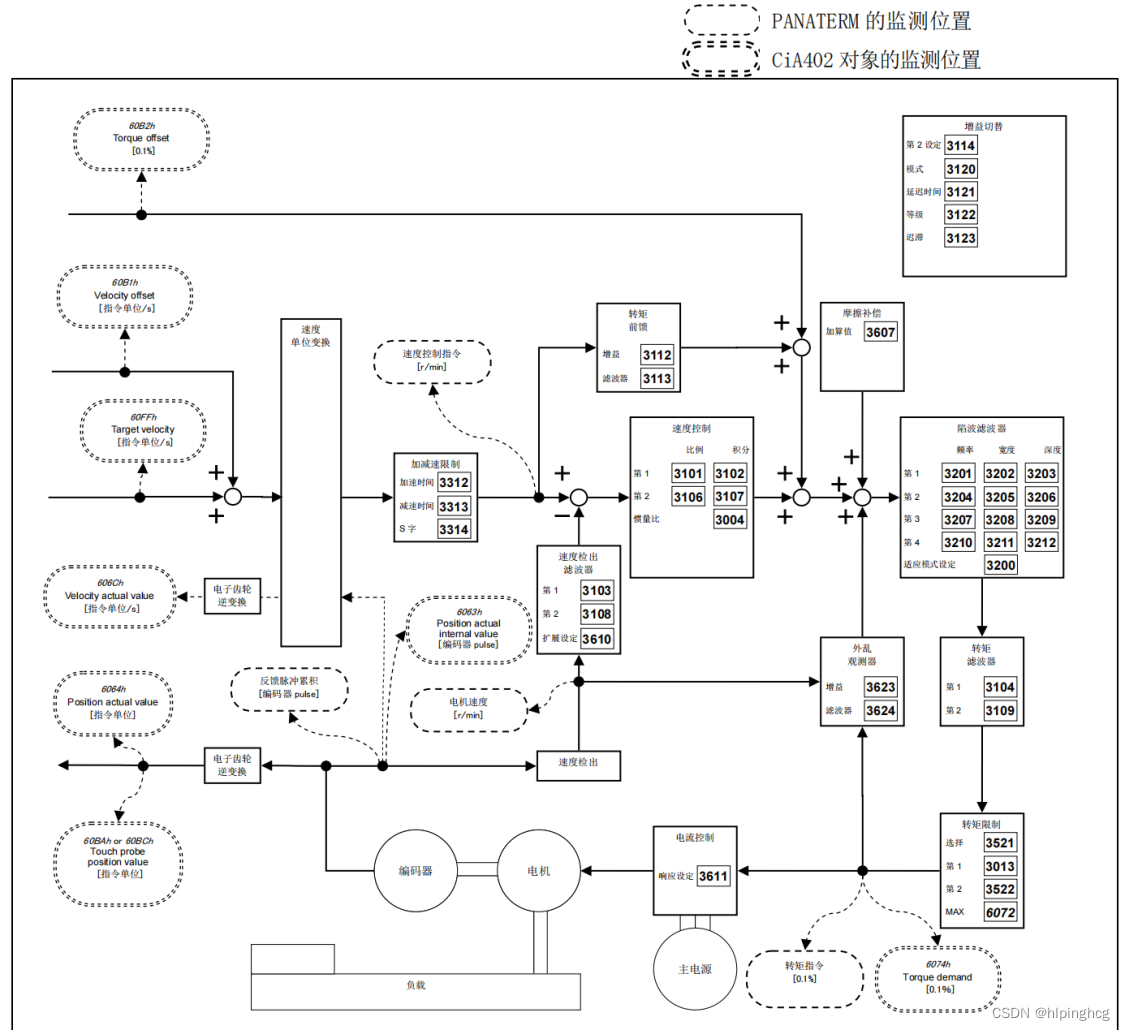
4.5 PV模式控制框图
4.5.1 PV模式关联对象(指令,设定类)
4.5.2 PV模式和其他模式关联对象

4.5.3 PV模式下的控制字
4.5.4 PV模式下的状态字


4.6 CSV模式控制框图(先预留,后面添加)
5、位置控制模式
5.1 位置模式控制字

5.2 位置模式状态字

5.3 位置模式相关参数
5.3.1 target_position(607Ah)
target_position 是给定目标位置,该位置可以是相对值,也可以是绝对值,取决于 controlword 的 bit6。
5.3.2 profile_velocity(6081h)
profile_velocity 是指位置启动后,完成加速后最终到达的速度
5.3.3 end_velocity(6082h)
end_velocity 是到达给定位置(target_ position)时的速度。通常为了在到达给定位置时停止驱动器,该参数设置为 0;但在连续多点位置时,该值可以设置成非零值。
5.3.4 profile_acceleration(6083h)
profile_acceleration 是到达给定位置期间的加速度。
5.3.5 profile_deceleration(6084h)
profile_deceleration 是到达给定位置期间的加速度。
5.3.6 quick_stop_deceleration(6085h)
quick_stop_deceleration 是急停(Quick Stop)的减速度。
5.3.7 motion_profile_type(6086h)
motion_profile_type 被用来选择何种速度曲线。(梯形速度曲线)
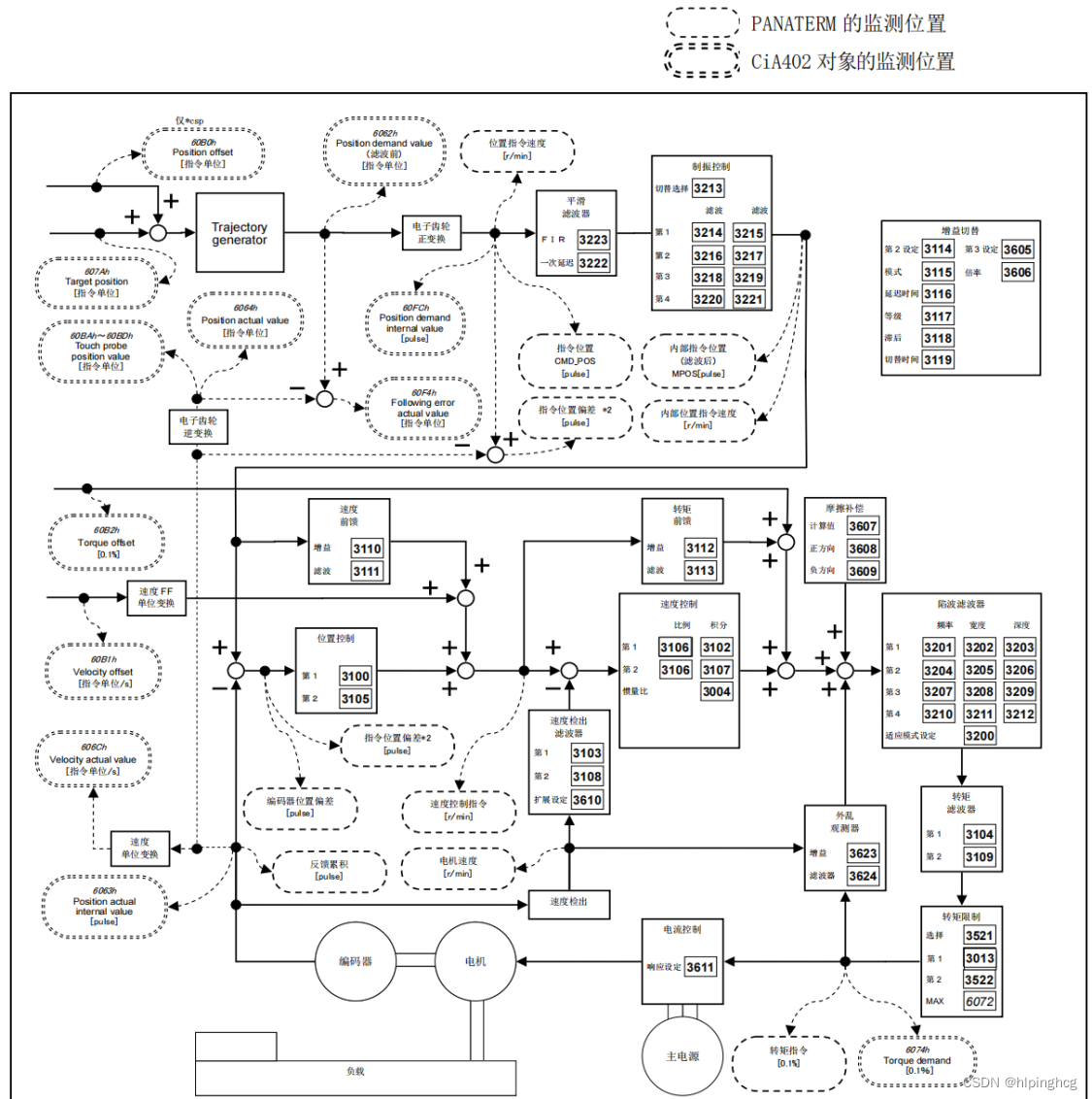
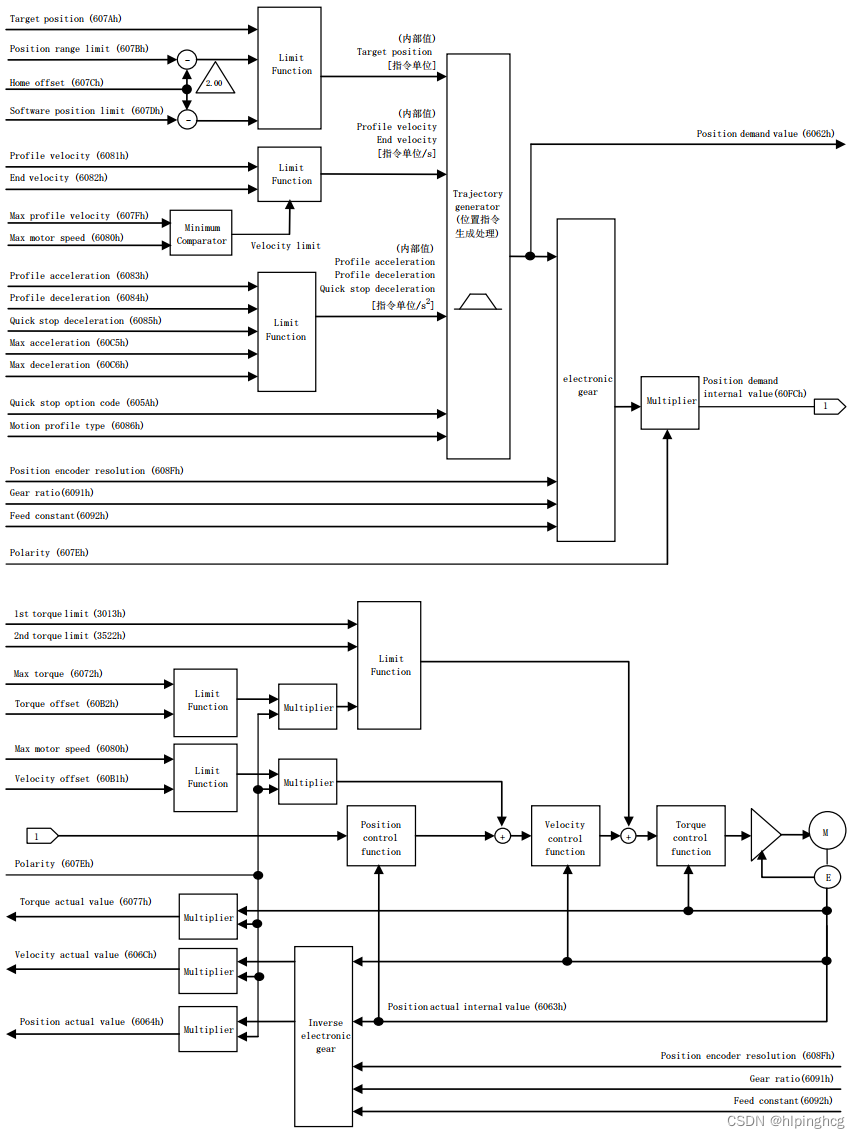
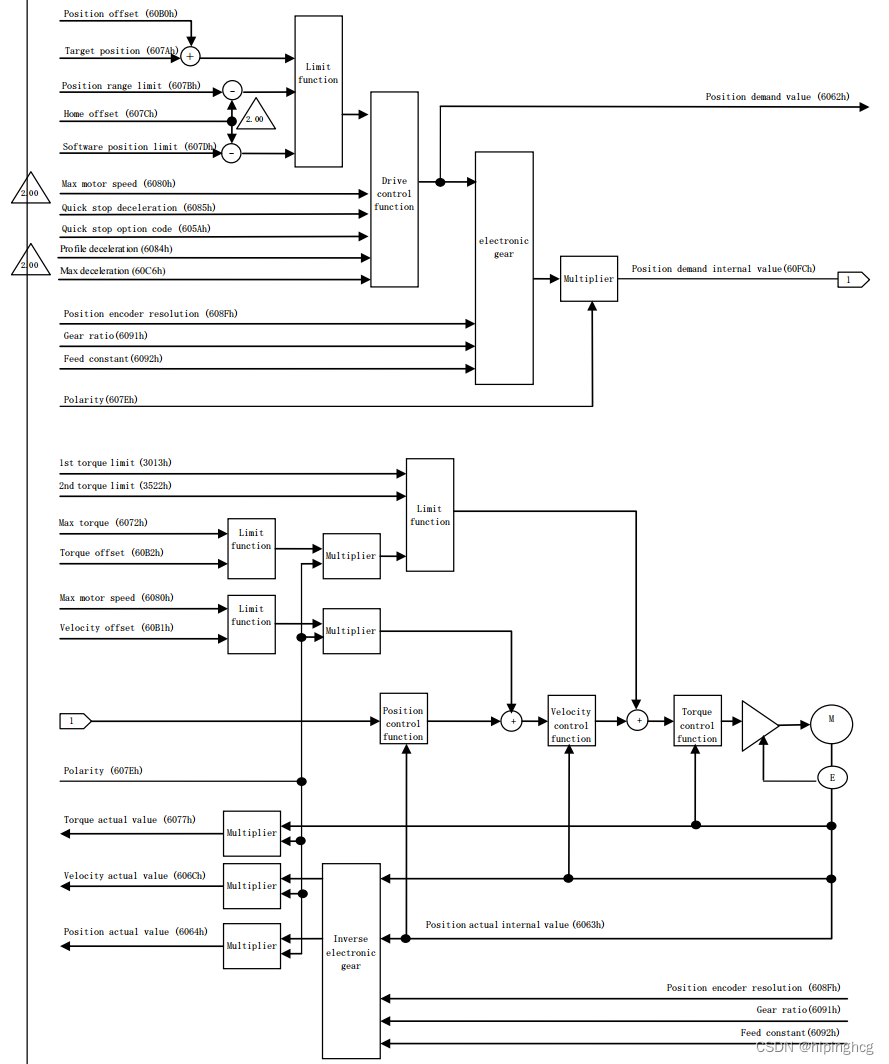
5.4 位置模式通用控制框图(PP,CSP,IP,HM)
5.5 Profile位置控制模式(PP Mode)
5.5.1 功能描述
给定目标位置有两种方法:
● 单步设定
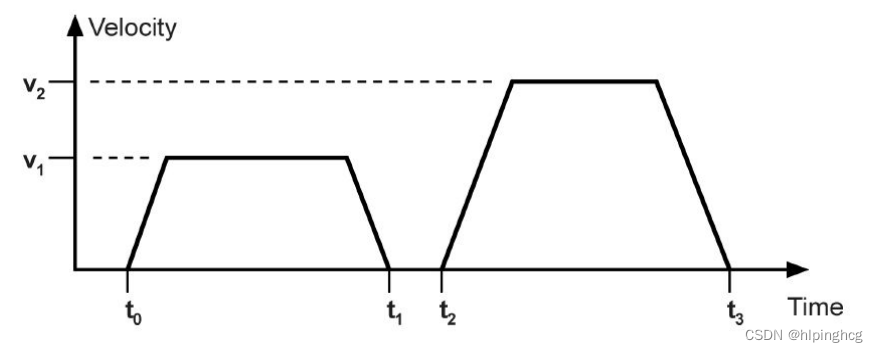
电机到达目标位置后,驱动器通知主机“目标位置到达”,然后获取新的目标位置并开始运动。在获取新的目标位置前,电机速度通常为零。
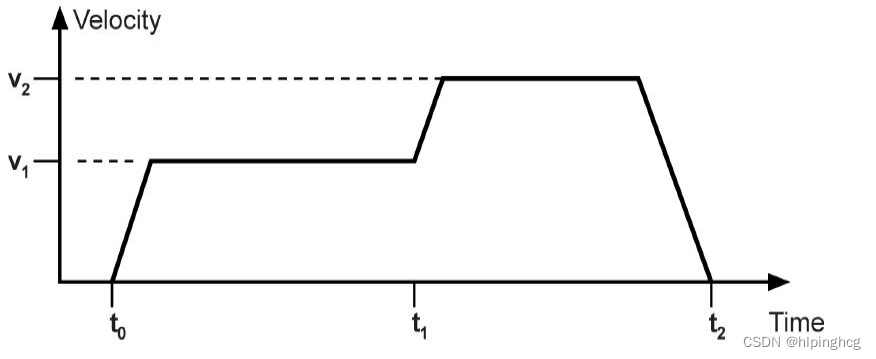
● 连续设定
电机到达目标位置后,立即继续朝下一个事先设置好的目标位置运动。这样可达到无停顿的连续运动效果,在两个目标位置之间,电机可以无需减速到零。
以上两种方法都可被控制字(controlword)的 bit4、bit5 和状态字 statusword 的bit12(set_point_acknowledge)实时改变。通过握手机制,可中断正在执行中的位置控制,利用这几个字位重设目标位置并启动执行。
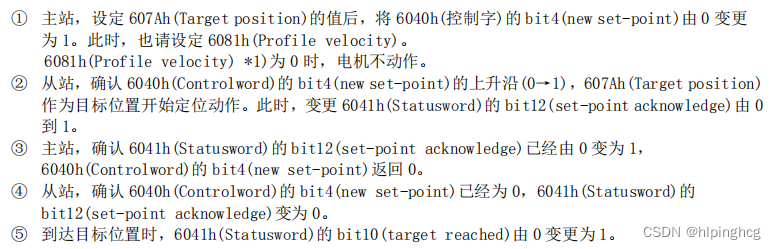
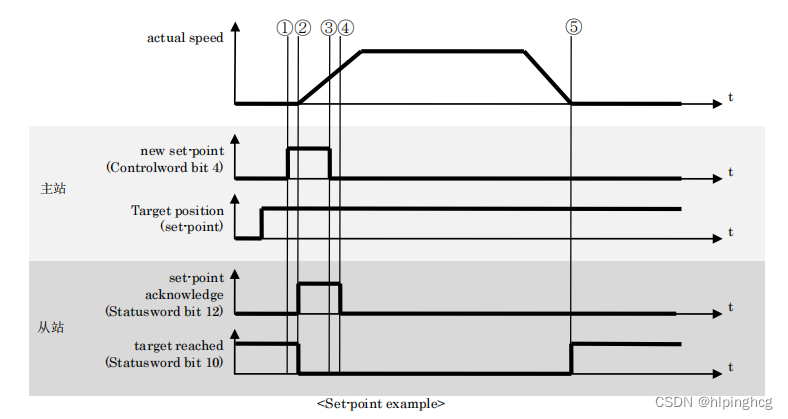
5.5.1.1 单步设定方法
1 首先设置网络管理状态为“操作(Operational)”,并且设置控制模式参数(6060 h)为 1;
2 根据实际需要设置给定目标位置(target_ position :607A h)等参数;
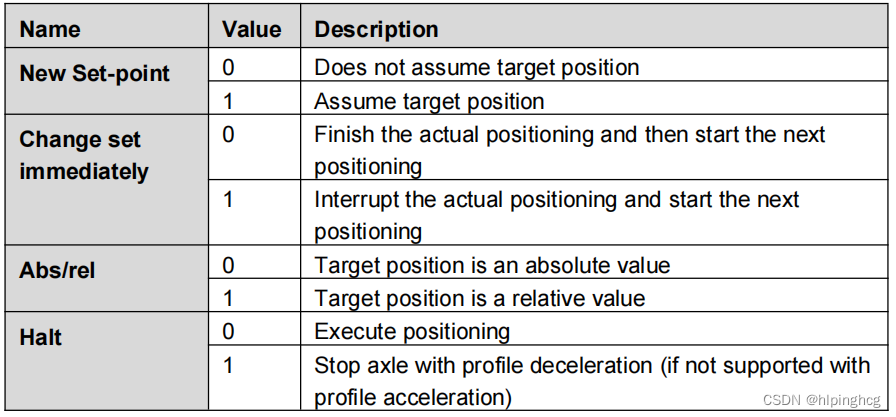
3 将控制字 controlword 的 bit4(new_set_point)设为“1”;bit5 (change_set_immediately)设为“0”;bit6(绝对/相对)则由目标位置类型(绝 对或相对)而定;
4 在状态字 statusword 的 bit12(set_point_acknowledge)设置好驱动器应答, 然后开始执行位置控制;
5 到达目标位置后,驱动器通过状态字 statusword 的 bit10(target_reached) 应答。然后依照程序继续运动或接受新的目标位置。
5.5.1.2 连续设定方法
1 首先设置网络状态为“操作(Operational)”,并且设置控制模式参数(6060 h) 为 1; 根据实际需要设置第 1 个给定目标位置(target_ position :607A h)、目标速度、加/减速等相关参数;
2 将控制字 controlword 的 bit4(new_set_point)设为“1”;bit5 (change_set_immediately)设为“0”;bit6(绝对/相对)则由目标位置类型(绝对或相对)而定;
3 在状态字 statusword 的 bit12(set_point_acknowledge)设置好驱动器应答, 然后开始执行位置控制;
4 设置第 2 个给定目标位置(target_ position :607A h)、目标速度、加/减速 等相关参数;
5 将控制字 controlword 的 bit4(new_set_point)设为“1”;bit5 (change_set_immediately)设为“0”;bit6(绝对/相对)则由目标位置类型(绝 对或相对)而定;
6 到达第 1 个目标位置后,驱动器不停机,继续走第 2 个目标位置控制;当到达 第 2 个目标位置后,驱动器通过状态字 statusword 的 bit10(target_reached) 应答。然后依照程序继续运动或接受新的目标位置。
5.5.2 PP控制模式的动作
1)基本的set-point

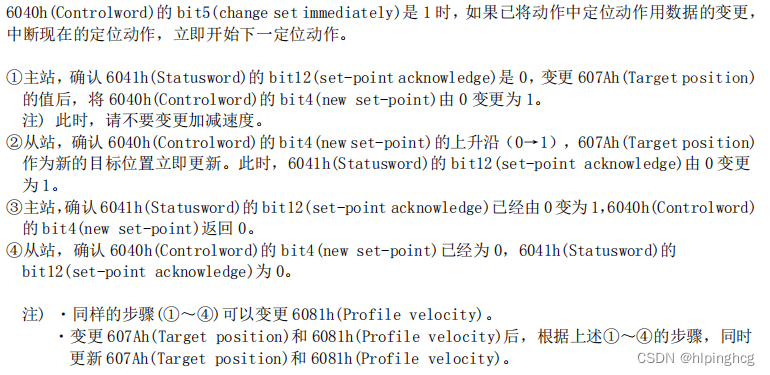
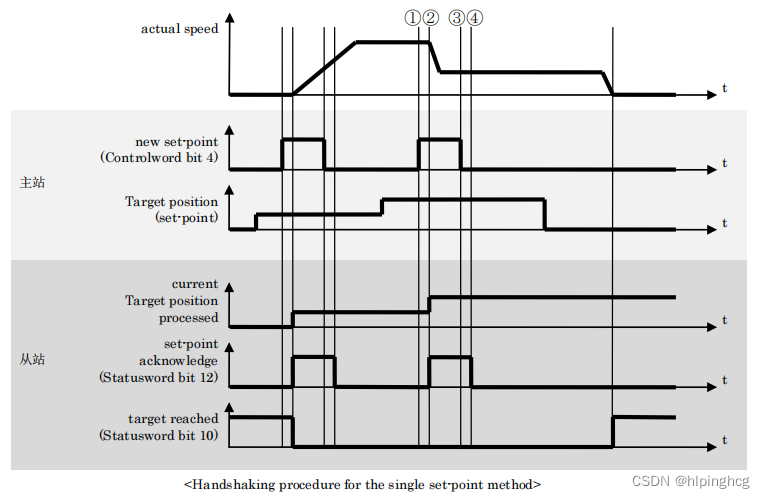
2)无缓冲时的动作数据变更:single set-point
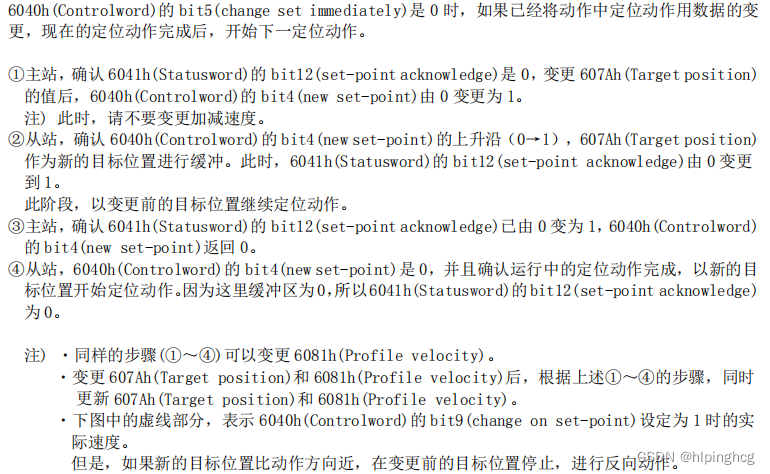
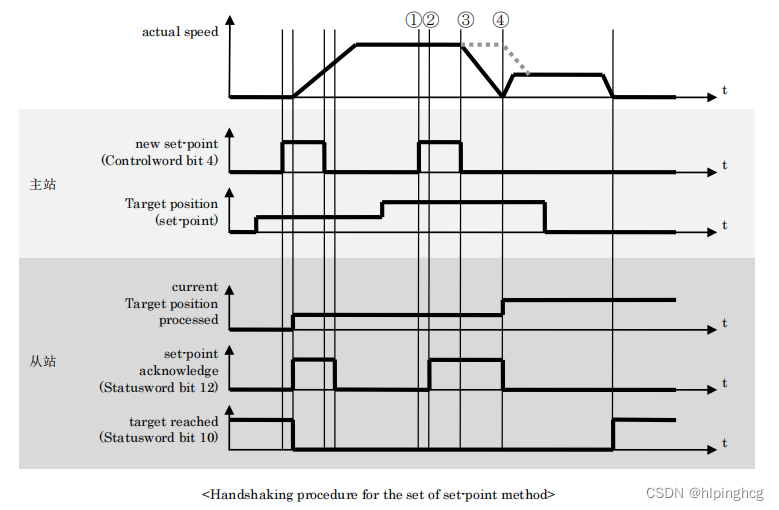
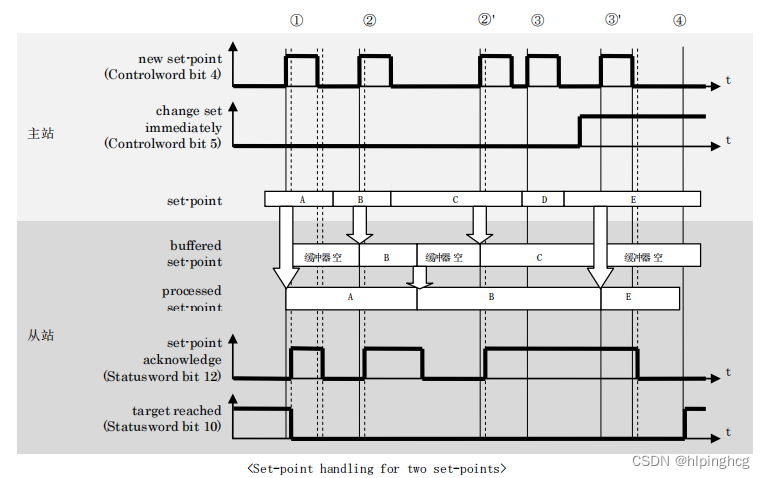
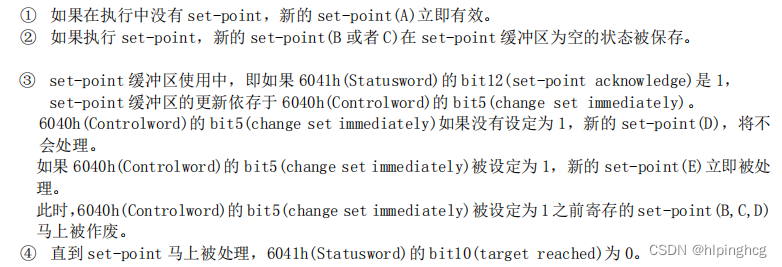
- 有缓冲时的动作数据变更:set of set-points
4)set-point的缓冲

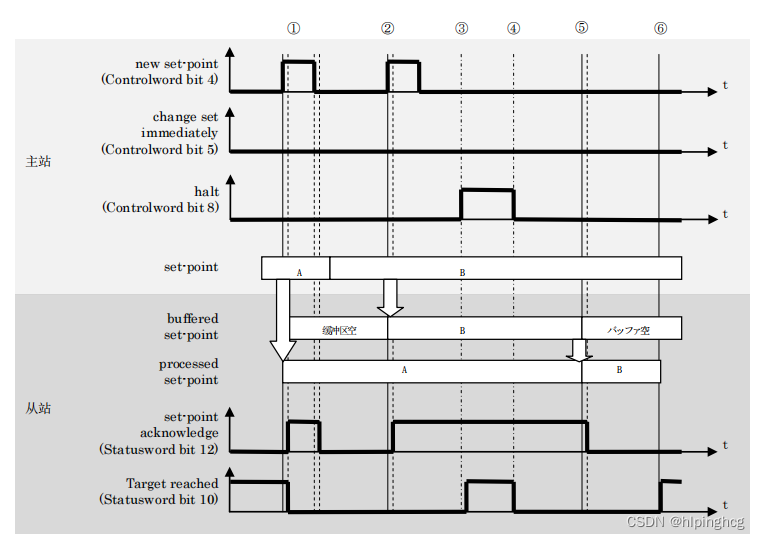
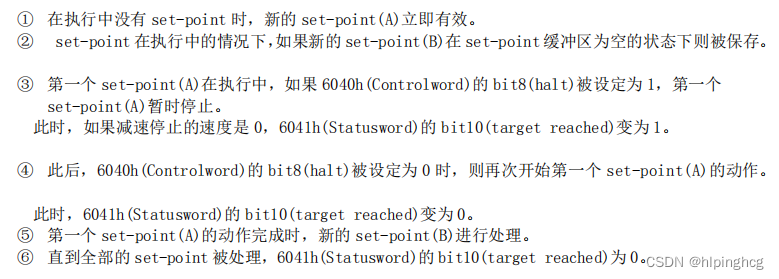
5)根据halt暂时停止

5.6 位置插补控制模式(IP mode,Interpolation Position Mode)
位置插补模式用在多轴协调控制或单轴位置插补运算控制中。该种模式利用时间同 步机制作为相互运动关联的伺服单元的时间轴,实现多轴协调同步运动。插补数据随着插补周期更新。内部插补依据该插补周期进行。插补数据为绝对位置值,插补周期与同步信号周期相同。
5.6.1 控制字

5.6.2 状态字

5.6.3 相关参数

5.6.3.1 Interpolation sub mode select(60C0h)
Interpolation sub mode select是IP控制下的插补方式选择,EDC的插补方式只提供线性插补。
5.6.3.2 Interpolation data record(60C1h)
Interpolation data record 存放插补位置数据,本伺服驱动器的插补指令使用第一个数据,即 subindex 为 1 的数据。
5.6.3.3 Interpolation time period(60C2h)
Interpolation tiem period 存放插补位置的时间数据。
5.7周期性同步位置控制模式(Cyclic Synchronous Position Mode)
周期性同步位置控制模式与位置插补模式的原理相似。在这种控制模式下主站可以 提供附加的速度和扭矩值,实现速度和扭矩的前馈控制。插补时间周期定义了目标位置 (Target Position)更新的时间间隔。在这里,插补周期与同步信号周期相同。
6 转矩控制模式
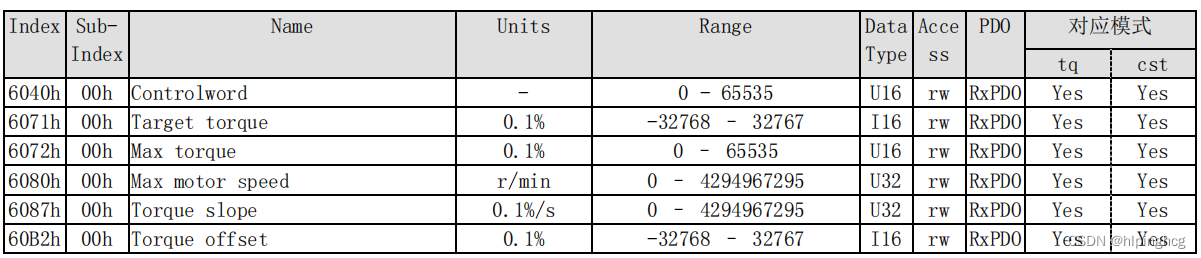
6.1 转矩控制相关参数
设定类
监控类
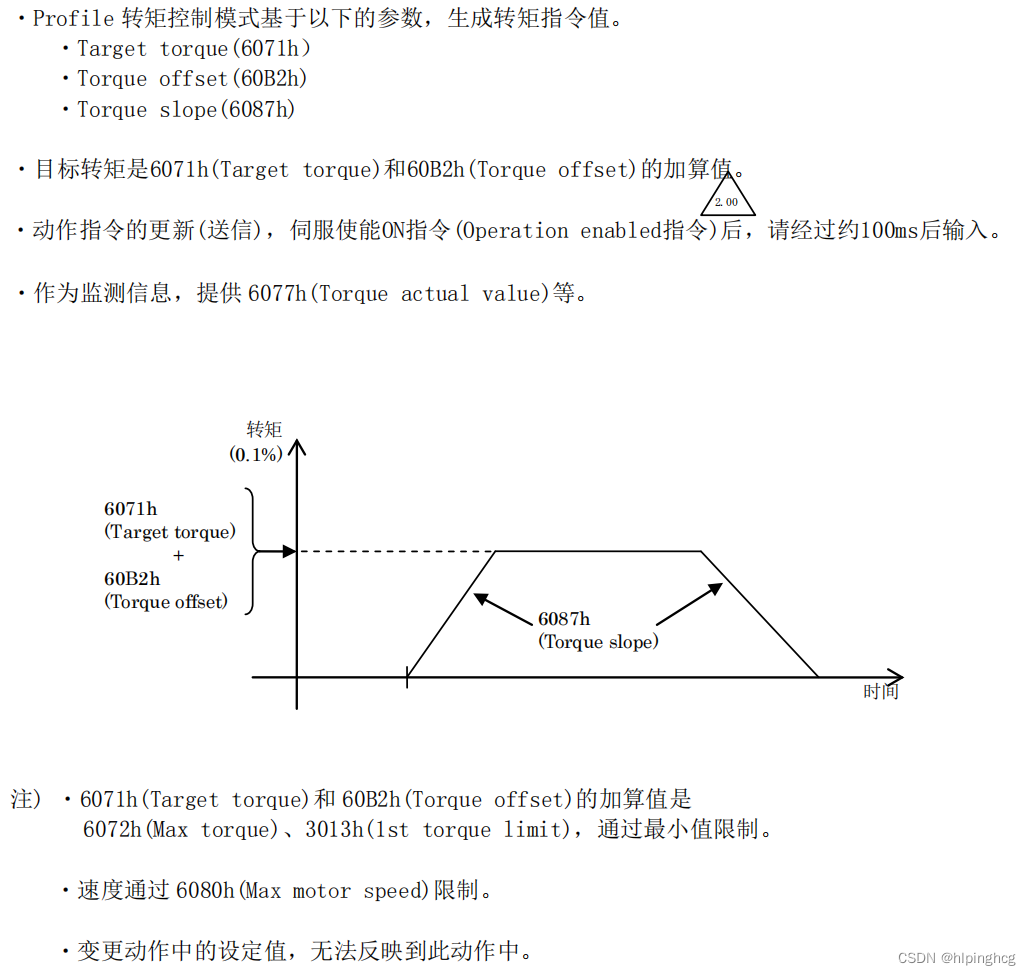
6.1.1 Target Torque(6071h)
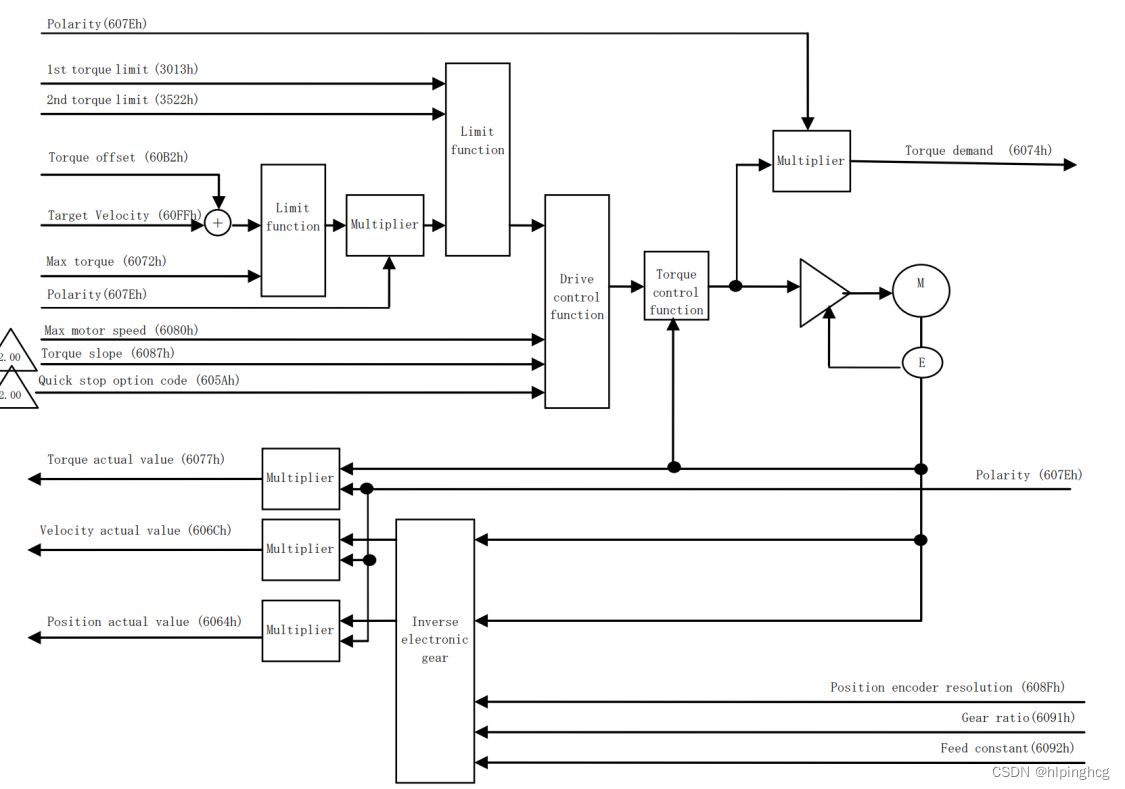
目标力矩。如果超过6072h(Max torque)的值,用6072h来限制。
6.1.2 Max Torque(6072h)
设定电机的最大转矩,最大值是通过内部处理用从电机读取的最大转矩进行限制。电机的最大转矩根据电机有所不同。
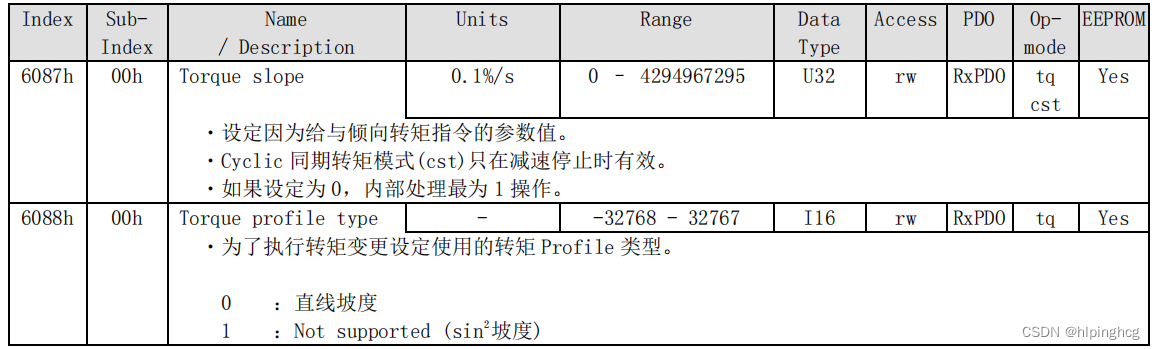
6.1.3 Torque Slope(6087h)
设定因为给予倾向转矩指令的参数值,Cyclic同期转矩模式只在减速停止时有效,如果设定为0,内部处理作为1操作
6.1.4 Torque offset(60B2h)
设定转矩指令的偏差值(转矩前馈),驱动禁止的情况下,减速中(立即停止中)转矩前馈的值为0
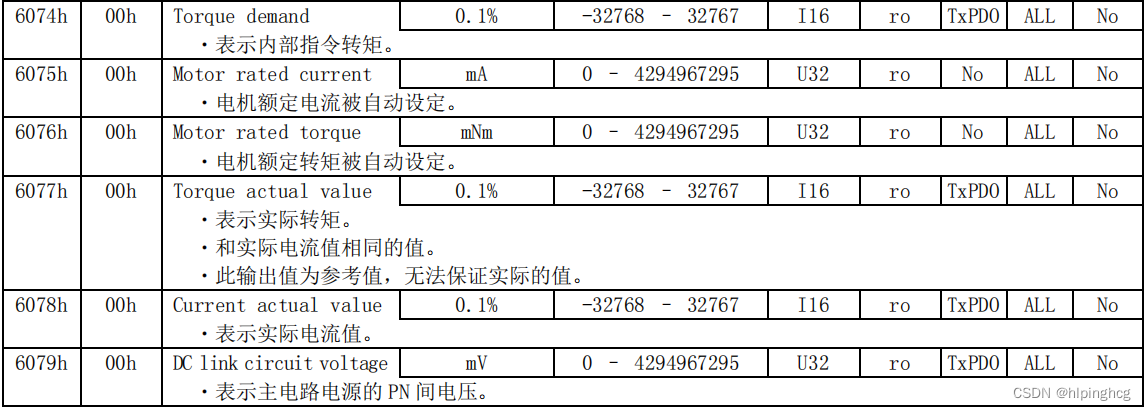
6.1.5 Torque demand(6074h)
内部指令转矩
6.1.6 Motor rated current(6075h)
电机额定电流被设定
6.1.7 Motor rated Torque(6076h)
电机额定力矩被设定
6.1.8 Torque actual value(6077h)
实际力矩,和实际电流值相同,此输出值作为参考值,无法保证实际的值。
6.1.9 Current actual value(6078h)
实际电流值
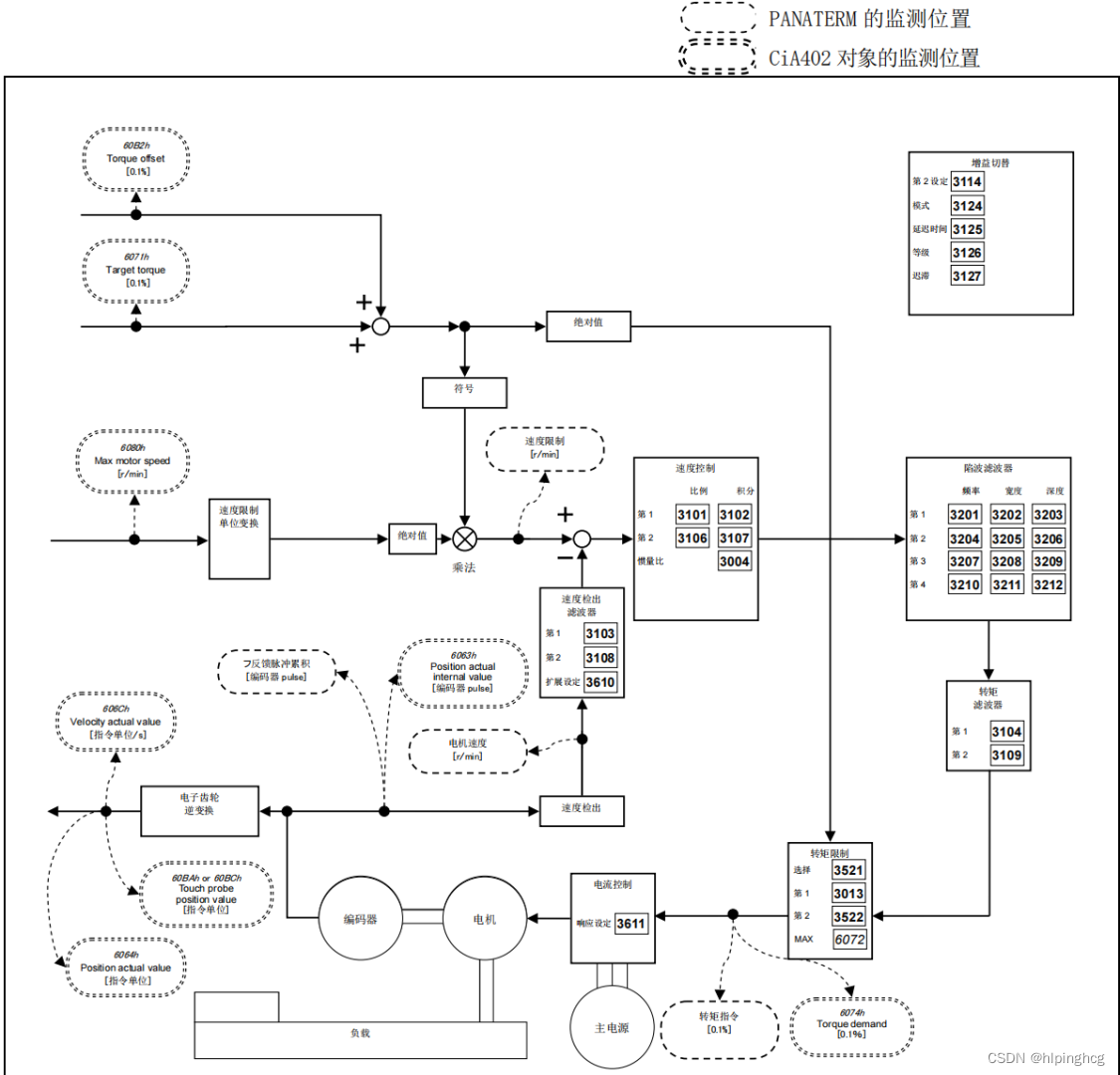
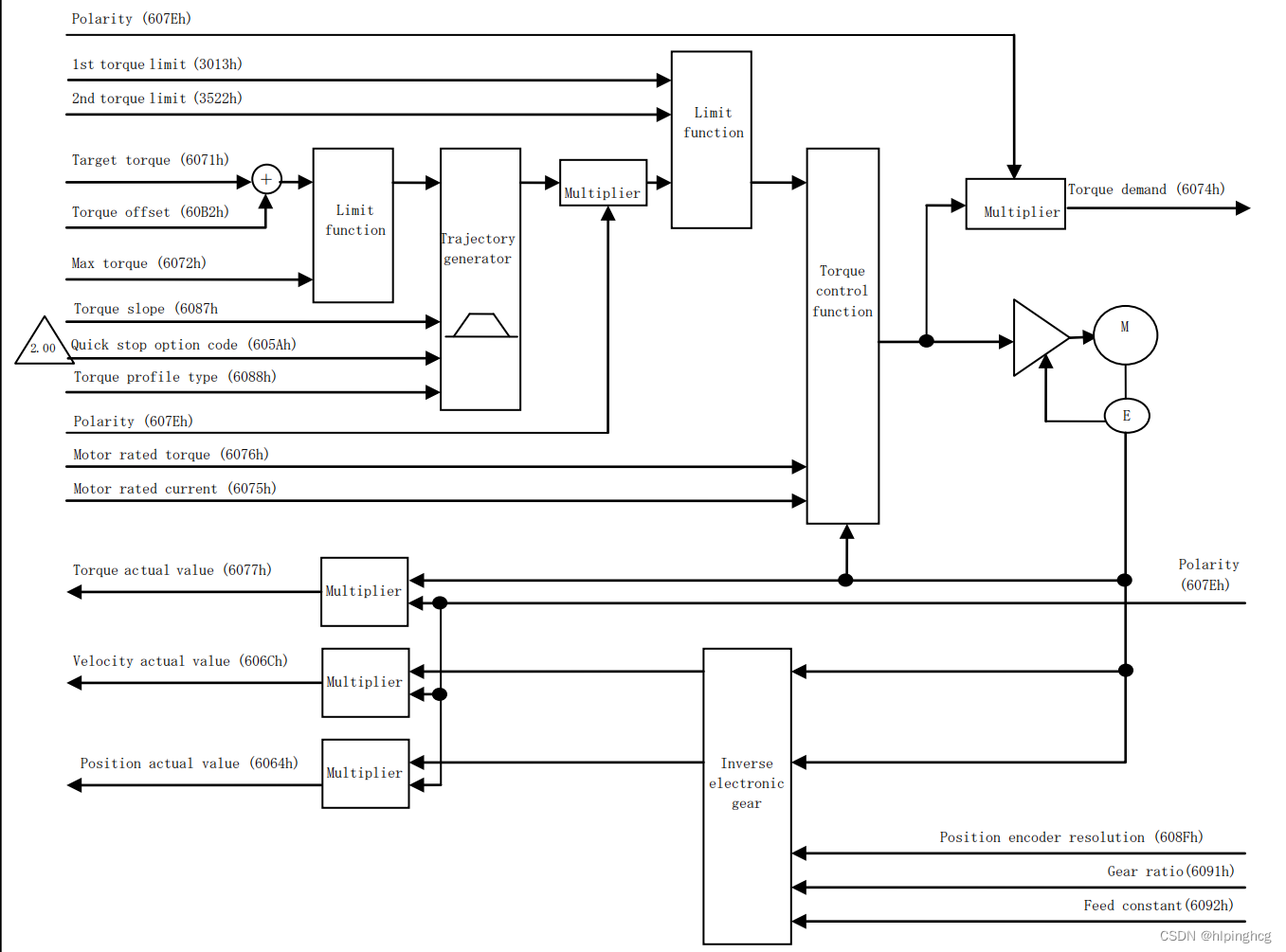
6.2 转矩控制通用框图
6.3 Profile转矩控制模式(pt mode)
6.3.1 PT控制模式的动作
6.4 周期性同步转矩控制模式(CST Mode)

6.4.1 CST控制模式的动作