前言
3GPP NR Positioning 5G定位标准:3GPP TS 38.305 V18
3GPP 标准网址:Directory Listing /ftp/
【NR 定位】3GPP NR Positioning 5G定位标准解读(一)-CSDN博客
【NR 定位】3GPP NR Positioning 5G定位标准解读(二)-CSDN博客
【NR 定位】3GPP NR Positioning 5G定位标准解读(三)-CSDN博客
【NR 定位】3GPP NR Positioning 5G定位标准解读(四)-CSDN博客
【NR 定位】3GPP NR Positioning 5G定位标准解读(五)-CSDN博客
【NR 定位】3GPP NR Positioning 5G定位标准解读(六)-CSDN博客
【NR 定位】3GPP NR Positioning 5G定位标准解读(七)- GNSS定位方法-CSDN博客
8 定位方法和支持程序
8.1 GNSS定位方法
8.1.1 概述
导航卫星系统提供自主地理空间定位,覆盖全球或区域。增强系统,如SBAS,是提供区域覆盖的导航卫星系统,以增强具有全球覆盖的导航系统。
根据定义,GNSS是指实现全球覆盖的卫星星座,然而,在3GPP规范中,GNSS一词用于涵盖全球、区域和增强卫星系统。本规范版本支持以下GNSS:
- GPS及其现代化版本[5]、[6]、[7];(全球覆盖)
- Galileo[8];(全球覆盖)
- GLONASS[9];(全球覆盖)
- 卫星基增强系统(SBAS),包括WAAS、EGNOS、MSAS和GAGAN[11];(区域覆盖)
- 准天顶卫星系统(QZSS)[10];(区域覆盖)
- 北斗导航卫星系统(BDS)[20][34][44][45]。(全球覆盖)
- 使用印度星座导航(NavIC)[43]。(区域覆盖)
每个全球GNSS可以单独使用或与其他系统组合使用,包括区域导航系统和增强系统。当组合使用时,有效的导航卫星信号数量将增加:
- 额外的卫星可以提高可用性(在特定位置的卫星可用性),并提高在卫星信号可能被遮挡的区域(如城市峡谷)的工作能力;
- 额外的卫星和信号可以提高可靠性,即通过额外的测量增加数据冗余,这有助于识别任何测量异常问题;
- 额外的卫星和信号可以通过改进的测量几何形状和现代化卫星改进的测距信号来提高精度。
当GNSS设计为与NG-RAN互操作时,网络会辅助UE GNSS接收器在多个方面提高性能。这些性能改进将:
- 减少UE GNSS启动和捕获时间;搜索窗口可以限制,测量速度显著提高;
- 提高UE GNSS灵敏度;通过NG-RAN获得定位辅助信息,因此当UE GNSS接收器无法解调GNSS卫星信号时,也可以在低信噪比情况下运行;
- 允许UE比使用独立GNSS消耗更少的手机电量;这是由于启动时间快,GNSS接收器在不需要时可以处于空闲模式;
- 允许UE以更高的精度计算其位置;通过NG-RAN获得RTK修正(对于N-RTK)和GNSS物理模型(对于SSR/PPP),因此UE可以使用这些辅助数据,结合自己的测量数据,即码和载波相位测量,以高精度计算位置;
- 允许UE确定并报告计算位置的完整性结果;UE可以使用通过NG-RAN获得的完整性要求和辅助数据,结合自己的测量数据,来确定计算位置的完整性结果。
网络辅助的GNSS方法依赖于UE GNSS接收器(可能具有降低的复杂性)与持续运行的GNSS参考接收器网络之间的信号传输,该网络对与辅助UE相同的GNSS星座具有清晰的天空可见性。支持两种辅助模式:
- UE辅助:UE执行GNSS测量(伪距、伪多普勒、载波相位范围等),并将这些测量值发送到位置测量功能(LMF),在那里进行位置计算,可能使用来自其他(非GNSS)源的额外测量值;
- 基于UE:UE执行GNSS测量并计算其自己的位置,可能使用来自其他(非GNSS)源的额外测量值和来自LMF的辅助数据。
辅助数据的内容可能因UE在UE辅助模式或基于UE模式下运行而异。
向UE发送的辅助数据可大致分类为:
- 辅助测量的数据:例如参考时间、可见卫星列表、卫星信号多普勒、码相位、多普勒和码相位搜索窗口;
- 提供位置计算手段的数据:例如参考时间、参考位置、卫星星历、时钟修正、来自GNSS参考接收器或接收器网络的码和载波相位测量值;
- 提高位置精度的数据:例如卫星码偏差、卫星轨道修正、卫星时钟修正、大气模型、RTK残差、梯度;
- 便于确定计算位置的完整性结果的数据。
具有GNSS测量功能的UE也可以在自主(独立)模式下运行。在自主模式下,UE根据从GNSS接收到的信号确定其位置,而无需网络的辅助。
8.1.2 要在NG-RAN/5GC元素之间传输的信息
8.1.2.0 总则
本条款定义了可能在LMF和UE之间传输的信息。
8.1.2.1 可能从LMF传输到UE的信息
8.1.2.1.0 总则
表8.1.2.1.0-1列出了可能从LMF发送到UE的UE辅助模式和基于UE模式的辅助数据。
注:这些辅助数据元素的提供以及UE对这些元素的使用分别取决于NG-RAN/5GC和UE的能力。
(注:这里的NG-RAN指的是下一代无线接入网络,5GC指的是5G核心网络,LMF指的是位置管理功能,UE指的是用户设备,也就是我们通常所说的手机、平板电脑等终端设备。)
Table 8.1.2.1.0-1: Information that may be transferred from the LMF to UE
| Assistance Data |
| Reference Time |
| Reference Location |
| Ionospheric Models |
| Earth Orientation Parameters |
| GNSS-GNSS Time Offsets |
| Differential GNSS Corrections |
| Ephemeris and Clock Models |
| Real-Time Integrity |
| Data Bit Assistance |
| Acquisition Assistance |
| Almanac |
| UTC Models |
| RTK Reference Station Information |
| RTK Auxiliary Station Data |
| RTK Observations |
| RTK Common Observation Information |
| GLONASS RTK Bias Information |
| RTK MAC Correction Differences |
| RTK Residuals |
| RTK FKP Gradients |
| SSR Orbit Corrections |
| SSR Clock Corrections |
| SSR Code Bias |
| SSR Phase Bias |
| SSR STEC Corrections |
| SSR Gridded Correction |
| SSR URA |
| SSR Correction Points |
| Integrity Service Parameters |
| Integrity Alerts |
| SSR IOD Update |
| SSR Satellite PCV Residuals |
8.1.2.1.1 参考时间
参考时间辅助为GNSS接收器提供粗略或精确的GNSS时间信息。特定的GNSS系统时间(例如,GPS、Galileo、GLONASS、BDS、NavIC系统时间)应使用GNSS ID进行指示。
在仅提供粗略时间辅助的情况下,参考时间提供对当前GNSS系统时间(其中特定GNSS由GNSS ID指示)的估计。LMF应为此时间实现±3秒的精度,包括允许LMF和UE之间的传输延迟。
在提供精确时间辅助的情况下,参考时间提供GNSS系统时间(其中特定GNSS由GNSS ID指示)与NG-RAN空中接口定时之间的关系。
8.1.2.1.2 参考位置
参考位置辅助为GNSS接收器提供其位置的先验估计(例如,通过Cell-ID、OTDOA定位等获得)及其不确定性。
地理参考框架应为TS 23.032 [4]中规定的WGS-84。
8.1.2.1.3 电离层模型
电离层模型辅助为GNSS接收器提供参数,以模拟GNSS信号通过电离层的传播延迟。可以提供由GPS [5]、Galileo [8]、QZSS [10]、BDS [20] [34] [44] [45]和NavIC [43]规定的电离层模型参数。
8.1.2.1.4 地球定向参数
地球定向参数(EOP)辅助为GNSS接收器提供构建ECEF到ECI坐标转换所需的参数,如GPS [5]中所述。
8.1.2.1.5 GNSS-GNSS时间偏移
GNSS-GNSS时间偏移辅助为GNSS接收器提供参数,以将一个GNSS的GNSS时间(其中特定GNSS由GNSS-1 ID指示)与其他GNSS的GNSS时间(其中特定GNSS由GNSS-2 ID指示)相关联。可以提供由GPS [5]、Galileo [8]、GLONASS [9]、QZSS [10]、BDS [20] [34] [44] [45]和NavIC [43]规定的GNSS-GNSS时间偏移参数。
8.1.2.1.6 差分GNSS校正
差分GNSS校正辅助为GNSS接收器提供伪距和伪距率校正,以减少GNSS接收器测量中的偏差,如[12]中所述。通过GNSS-ID指示校正有效的特定GNSS。
8.1.2.1.7 星历和时钟模型
星历和时钟模型辅助为GNSS接收器提供参数,以计算GNSS卫星位置和时钟偏移。各种GNSS使用不同的模型参数和格式,并且信令支持由各个GNSS定义的所有参数格式。
8.1.2.1.8 实时完整性
实时完整性辅助为GNSS接收器提供关于GNSS星座健康状态的信息(其中特定GNSS由GNSS ID指示)。
出于完整性目的(根据第8.1.1a条),如果卫星ID和信号出现在不健康(不良)信号列表中,则应将GNSS卫星和信号组合标记为“不使用”(DNU)。
注:如果在任何提供辅助数据的消息中缺少实时完整性辅助,则解释为对所有进行完整性监测的卫星和信号DNU=FALSE。
8.1.2.1.9 数据位辅助
数据位辅助为GNSS接收器提供关于由GNSS卫星在特定时间传输的数据位或符号的信息(其中特定GNSS由GNSS ID指示)。UE可以使用此信息进行灵敏度辅助(数据擦除)和时间恢复。
8.1.2.1.10 采集辅助
采集辅助为GNSS接收器提供关于可见卫星、参考时间、预期码相位、预期多普勒、搜索窗口(即码和多普勒不确定性)以及GNSS信号的其他信息(其中特定GNSS由GNSS ID指示),以实现GNSS信号的快速采集。
8.1.2.1.11 星历表
星历表辅助为GNSS接收器提供参数,以计算粗略的(长期的)GNSS卫星位置和时钟偏移。各种GNSS使用不同的模型参数和格式,并且信令支持由各个GNSS定义的所有参数格式。
8.1.2.1.12 UTC模型
UTC模型辅助为GNSS接收器提供参数,以将GNSS系统时间(其中特定GNSS由GNSS ID指示)与世界协调时间相关联。各种GNSS使用不同的模型参数和格式,并且信令支持由各个GNSS定义的所有参数格式。
8.1.2.1.13 RTK参考站信息
RTK参考站信息为GNSS接收机提供参考站安装的天线的ARP的地球中心地固(ECEF)坐标,以及ARP相对于测量标志的高度。此外,这些辅助数据还提供有关参考站点安装的天线类型的信息。
注:使用MAC N-RTK技术时,这些辅助数据用于提供有关主参考站的信息(参见第8.1.2.1a条)。
8.1.2.1.14 RTK辅助站数据
RTK辅助站数据为GNSS接收机提供辅助数据中所有辅助参考站的位置信息(参见第8.1.2.1a条)。这些值是以主参考站为基准的相对大地坐标(纬度、经度和高度)表示,并基于GRS80椭球体。这种类型的辅助数据仅与MAC N-RTK技术相关[31]。
8.1.2.1.15 RTK观测值
RTK观测值为GNSS接收机提供参考站为每个GNSS信号生成的所有主要观测量(伪距、相位距、相位速率(多普勒)和载噪比)。参考站的信号生成符合[31]的要求:例如,同一频带内不同信号的相位测量必须相位对齐。更多示例请参见[31]。
伪距是指卫星与GNSS接收机天线之间的距离,以米为单位,等于接收时间(以GNSS接收机的时间框架表示)与发送时间(以卫星的时间框架表示)之间的差异乘以光速。
相位距测量是卫星与接收机之间的距离,以载波频率的周期数为单位。此测量比伪距更准确(在毫米级别),但它具有未知整数倍的波长模糊性。
相位速率是指在特定时间段内卫星与GNSS接收机之间的相位距的变化率。
载噪比是指经过GNSS接收机滤波器后,接收到的调制载波信号功率与噪声功率的比值。
注:使用MAC N-RTK技术时,这些辅助数据用于提供主参考站记录的原始观测量(参见第8.1.2.1a条)。
8.1.2.1.16 RTK通用观测信息
RTK通用观测信息为GNSS接收机提供适用于任何GNSS的通用信息,例如时钟控制指标。此辅助数据始终与GNSS RTK观测值一起使用(参见第8.1.2.1.15条)。
8.1.2.1.17 GLONASS RTK偏差信息
RTK偏差信息为GNSS接收机提供信息,用于补偿由参考接收机代码相位偏差引入的一阶频率间相位距偏差。此信息仅适用于GLONASS FDMA信号。如果使用MAC网络RTK方法,GLONASS RTK偏差信息将定义与主参考站相关的代码相位偏差[31]。
8.1.2.1.18 RTK MAC校正差异
RTK MAC校正差异为GNSS接收机提供在主参考站与其辅助参考站之间生成的电离层(色散)和几何(非色散)校正信息[31]。
8.1.2.1.19 RTK残差
RTK残差为GNSS接收机提供网络RTK技术中传播的插值校正所生成的网络误差模型。如果RTK网络具有足够的冗余,位置服务器进程可以提供残差插值误差的估计。目标UE可以使用这些质量估计来优化RTK解决方案的性能。目标UE可以仅将这些值视为先验估计,如果有足够的跟踪数据可用,目标UE可能能够自行判断残余的几何和电离层误差。根据[31],RTK残差错误信息应每10-60秒传输一次。
8.1.2.1.20 RTK FKP梯度
RTK FKP梯度为GNSS接收机提供观测空间中几何(对流层和卫星轨道)和电离层信号分量的水平梯度。根据[31],RTK FKP梯度信息通常应每10-60秒传输一次。
以下是您提供的文本的翻译:
8.1.2.1.21 SSR轨道修正
SSR轨道修正为GNSS接收器提供径向、沿轨和跨轨组件的轨道修正参数。这些轨道修正用于计算卫星位置修正,与根据广播星历计算出的卫星位置相结合(见第8.1.2.1.7条)。
注1:轨道修正定义了广播星历轨道与卫星天线参考点(ARP)之间的偏移,其他修正均参照此偏移。卫星天线沿线的参考点的精确定义由网络实现定义,且所有修正一起使用时应产生一致的解决方案。
注2:除非网络提供,否则UE不应应用任何额外的卫星天线相位中心(APC)修正,如相位中心偏移(PCO)或相位中心变化(PCV)。在这种情况下,UE可以选择应用SSR卫星PCV残差修正中包含的额外PCV残差。网络可以形成SSR修正(例如SSR相位偏差),以最小化SSR卫星PCV残差修正的幅度,即对于不提供此修正的网络实现,或最小化不使用此修正的UE的影响。
出于完整性考虑,SSR轨道修正还提供了轨道误差和轨道误差率的相关时间,以及限制残差轨道误差及其相关误差率的均值和标准差。SSR轨道修正还包括卫星和星座的剩余风险。这些剩余风险是卫星或星座信号在空间中的总剩余风险,包括轨道、时钟、偏差以及所有其他卫星或星座恐惧事件,但不包括大气效应。
当根据8.1.1a应用完整性界限时,必须通过将轨道误差均值和方差沿卫星和用户之间的视线向量投影来计算均值和标准差,根据以下公式:
stdDevorbit =√(R v∙I) (公式8.1.2.1.21-1)
meanorbit = |[R^T I]_AT |._AT+ |[R^T I]_CT |._CT+ |[R^T I]_RA |._RA
其中:I:从用户到卫星在WGS-84 ECEF坐标系中的3D视线向量。R:从卫星沿轨(AT)、跨轨(CT)和径向(RA)坐标到WGS-84 ECEF坐标系的旋转矩阵。RT表示转置矩阵。v:在卫星沿轨、跨轨和径向坐标中表达的3D轨道误差方差向量。:在卫星沿轨、跨轨和径向坐标中表达的平均轨道误差向量。向量v在SSR轨道修正中表示为方差轨道残差误差向量中的三个元素。
8.1.2.1.22 SSR时钟修正
SSR时钟修正为GNSS接收器提供参数,以计算应用于广播卫星时钟的GNSS卫星时钟修正(见第8.1.2.1.7条)。二次多项式描述了特定时间段的时钟差异:时钟偏移、漂移和漂移率。出于完整性考虑,SSR时钟修正还提供了时钟误差和时钟误差率的相关时间,以及限制残差时钟误差及其相关误差率的均值和标准差。
8.1.2.1.23 SSR代码偏差
SSR代码偏差为GNSS接收器提供必须添加到相应代码信号的伪距测量中的代码偏差,以获得修正的伪距。SSR代码偏差包含绝对值,但还通过设置其中一个偏差为零来启用差分代码偏差的替代使用。UE可以一致地使用传输了代码偏差的信号。UE使用未从辅助数据消息中检索到相应代码偏差的信号是不可靠的。出于完整性考虑,SSR代码偏差还提供了限制残差代码偏差误差及其相关误差率的均值和标准差。
8.1.2.1.24 SSR相位偏差
SSR相位偏差为GNSS接收器提供GNSS信号相位偏差,这些偏差被添加到相应信号的载波相位测量中,以获得校正后的相位范围。提供了一个用于计算相位偏差不连续时的事件的指示器。还提供了一个可选的指示器,用于指示每个信号是否支持固定、宽巷固定或浮点PPP-RTK定位模式。
注1:在UE侧,需要适当类型的相位偏差校正来恢复PPP-RTK中相位模糊的整数性质。它们的缺失会影响定位解决方案的质量,并阻止快速收敛时间。
注2:PPP-RTK固定位置模式对应于UE将载波相位模糊度固定为整数值。PPP-RTK宽巷固定定位模式对应于形成载波相位测量的宽巷组合,并将得到的模糊度固定为整数值。在PPP-RTK浮点定位模式中,载波相位模糊度不被视为整数值。
注3:根据[36],SSR相位偏差值必须与卫星偏航角为零保持一致。
出于完整性目的,SSR相位偏差还提供了界定剩余相位偏差误差及其相关误差率的均值和标准差。
8.1.2.1.25 SSR STEC校正
SSR STEC校正为GNSS接收器提供参数,用于基于每个卫星的可变阶多项式计算电离层倾斜延迟校正,并将其应用于代码和相位测量。
出于完整性目的,SSR STEC校正还提供了电离层剩余风险参数、电离层范围误差和范围误差率的相关时间,以及界定剩余电离层误差及其相关误差率的均值和标准差。
8.1.2.1.26 SSR网格校正
SSR网格校正在一系列校正点上为GNSS接收器提供STEC残差和对流层延迟,并表示为静力学和湿垂直延迟。
注:最终的电离层倾斜延迟(STEC)由SSR STEC校正中提供的多项式部分和SSR网格校正中提供的残差部分组成。
出于完整性目的,SSR网格校正还提供了对流层剩余风险参数、对流层范围误差和范围误差率的相关时间,以及界定剩余对流层误差及其在垂直静力学延迟和垂直湿延迟组件中的相关误差率的均值和标准差。
8.1.2.1.27 SSR URA
SSR URA为接收器提供关于每颗卫星校正的估计精度的信息。
8.1.2.1.28 SSR校正点
SSR校正点提供了一个校正点坐标列表或一个校正点数组(“网格”),其中SSR网格校正是有效的。
8.1.2.1.29 完整性服务参数
完整性服务参数提供了为其认为相关的GNSS完整性辅助数据有效的完整性风险(IR)范围。
8.1.2.1.30 完整性警报
完整性服务警报提供有关服务是否可用于完整性的信息。一个“不要使用”(DNU)标志表示相应的辅助数据不适合用于计算完整性。如果发出完整性服务警报且DNU标志为假,则相应的辅助数据可用于计算完整性。DNU标志被定义为仅适用于指定的历元时间。
8.1.2.1.31 SSR IOD更新
SSR IOD更新用于基于其数据发布(IOD)值链接辅助数据元素,特别是对于不经常更新的元素。具有匹配IOD的元素在SSR IOD更新元素有效时(即在SSR IOD更新和SSR更新间隔内,并相对于IOD SSR)被链接并有效。
注:由网络确保SSR IOD更新的更新间隔和其他SSR辅助数据元素被配置为防止不一致的数据一起使用,即当SSR IOD更新内的IOD值发生变化时,它不会导致与仍在其更新间隔内的现有数据不一致,或更改发生在其他辅助数据到期的边界上。
8.1.2.1.32 SSR卫星PCV残差
SSR卫星相位中心变化(PCV)残差仅提供卫星APC的随下视角度变化的变化,这些变化可以与SSR轨道校正和SSR相位偏差结合使用,以确定卫星天线有效中心的位置。SSR卫星PCV残差可能包括在SSR轨道校正和SSR相位偏差中未校正的剩余PCO误差。
8.1.2.1a 对于支持不同RTK服务级别的辅助数据分组的建议
本条款为不同的高精度GNSS服务级别提供建议:RTK、N-RTK、PPP和PPP-RTK。
高精度GNSS方法可以分类为:
- 单基站RTK服务:RTK是一种使用基于载波的测距测量(即相位范围)以差分方式提高定位精度的技术。基本概念是减少和消除已知位置的参考站和UE对之间的共同误差。当仅使用伪距(基于代码的测量)来计算UE位置时,这种方法被称为DGNSS(差分GNSS)。
Table 8.1.2.1a-1: Single base RTK service: Specific information that may be transferred from the LMF to the UE
| Assistance Data |
| RTK Reference Station Information |
| RTK Observations |
| RTK Common Observation Information |
| GLONASS RTK Bias Information (if GLONASS data is transmitted) |
| Ephemeris and Clock (if UE did not acquire the navigation message) |
- 非物理参考站网络RTK服务:在这种方法中,目标UE从虚拟的参考站接收合成观测值。位置服务器上的网络RTK软件正在执行误差估计,并在目标设备的初始位置附近创建一个虚拟参考站(预先提供给位置服务器)。目标UE解释并使用这些数据,就好像它来自单个真实的参考站一样。此外,目标UE还可以接收网络信息,如RTK网络残差(见8.1.2.1.19条)甚至FKP梯度(见8.1.2.1.20条)。
注:这里的“UE”可能指的是“User Equipment”,即用户设备,在无线通信中常常用来指代手机、平板电脑等终端设备。而“RTK”可能是“Real-Time Kinematic”的缩写,这是一种用于实时确定位置的技术,常用于GPS和其他卫星导航系统中。“FKP”可能是一个特定领域的术语或缩写,但在没有进一步上下文的情况下,其确切含义不太清楚。从上下文来看,它可能与某种位置或导航参数有关。
Table 8.1.2.1a-2: Non-Physical Reference Station Network RTK service: Specific information that may be transferred from the LMF to the UE
| Assistance Data |
| RTK Reference Station Information |
| RTK Observations |
| RTK Common Observation Information |
| GLONASS RTK Bias Information (if GLONASS data is transmitted) |
| RTK Residuals |
| RTK FKP Gradients |
| Ephemeris and Clock (if UE did not acquire the navigation message) |
MAC Network RTK服务:在MAC网络RTK中,会使用一组参考站,其中之一被选定为主站。其他站点则被称为辅助站。在这项服务中,位置服务器为单个参考站(即主站)发送完整的原始观测数据和坐标信息。对于网络中的所有辅助站(或合适的站点子集),会以高度紧凑的形式向用户设备(UE)提供信息:它们的简化模糊度水平的观测值、坐标差异(相对于主站的观测值和坐标)以及网络残差。如果为每个相位范围(卫星-接收器对)的整数模糊度已经被消除(或调整),使得在处理过程中形成双差(涉及两个接收器和两个卫星)时整数模糊度能够相互抵消,那么两个参考站就被认为是处于共同的模糊度水平。在特定的一组站点上,而不是在整个GNSS网络上,维持一个共同的模糊度水平,会导致将所有具有模糊度水平的参考站分组为网络集群或子网。如果一个网络只有一个子网,这表明整个网络都建立了模糊度水平。当子网是预先定义好的,辅助数据就可以广播到指定子网内的所有UE。关于子网使用的更多细节,可以参阅[31]。
Table 8.1.2.1a-3: MAC Network RTK service: Specific Information that may be transferred from the LMF to the UE
| Assistance Data |
| RTK Reference Station Information |
| RTK Auxiliary Station Data |
| RTK Observations |
| RTK Common Observation Information |
| GLONASS RTK Bias Information (if GLONASS data is transmitted) |
| RTK MAC Correction Differences |
| RTK Residuals |
| Ephemeris and Clock (if UE did not acquire the navigation message) |
FKP Network RTK服务:利用FKP的概念,从GNSS参考站网络中推导出与距离相关的误差(如电离层、对流层和轨道)的水平梯度,并与相应参考站(物理或非物理)的原始数据或校正数据一起传输到目标设备。目标UE可以使用这些梯度来计算其自身位置与距离相关的误差的影响。
Table 8.1.2.1a-4: FKP Network RTK service: Information that may be transferred from the LMF to the UE
| Assistance Data |
| RTK Reference Station Information |
| RTK Observations |
| RTK Common Observation Information |
| GLONASS RTK Bias Information (if GLONASS data is transmitted) |
| RTK Residuals |
| RTK FKP Gradients |
| Ephemeris and Clock (if UE did not acquire the navigation message) |
PPP服务:这一概念利用从全球参考站网络以及大气模型中得出的精确卫星轨道和时钟参数来执行单站定位[31]。与RTK和网络RTK相比,PPP不是一种差分技术,因此没有基线限制。当轨道和时钟辅助数据元素实时提供,且没有延迟时,该方法被称为实时PPP。
Table 8.1.2.1a-5: SSR PPP service: Information that may be transferred from the LMF to the UE
| Assistance Data |
| SSR Orbit Corrections |
| SSR Clock corrections |
| SSR Code Bias |
| Ephemeris and Clock (if UE did not acquire the navigation message) |
| SSR IOD Update |
| SSR Satellite PCV Residuals |
PPP-RTK服务:这一概念利用精确的卫星轨道和时钟参数、从全球参考站网络得出的卫星信号偏差,以及电离层和对流层校正来执行单站定位IS-QZSS-L6-001[36]。因此,PPP-RTK服务通过补偿全局和局部校正来提供更准确的位置信息。与PPP相比,PPP-RTK要求用户设备(UE)位于电离层和对流层校正覆盖的区域内。
Table 8.1.2.1a-6: SSR PPP-RTK service: Information that may be transferred from the LMF to the UE
| Assistance Data |
| SSR Orbit Corrections |
| SSR Clock corrections |
| SSR Code Bias |
| Ephemeris and Clock (if UE did not acquire the navigation message) |
| SSR Phase Bias |
| SSR STEC Corrections |
| SSR Gridded Correction |
| SSR URA |
| SSR Correction Points |
| SSR IOD Update |
| SSR Satellite PCV Residuals |
8.1.2.1b 完整性参数的映射
表8.1.2.1b-1根据完整性操作原则(条款7.13.2)显示了完整性字段与SSR辅助数据之间的映射关系。表8.1.2.1b-1中列出的每个字段名的相应字段描述在TS 37.355 [42]的条款6.5.2.2中进行了详细说明。
Table 8.1.2.1b-1: Mapping of Integrity Parameters
| Error | GNSS Assistance Data | Integrity Fields | ||||
| Integrity Alerts | Integrity Bounds (Mean) | Integrity Bounds (StdDev) | Residual Risks | Integrity Correlation Times | ||
| Orbit | SSR Orbit Corrections | Real-Time Integrity (see Clause 8.1.2.1.8) | Mean Orbit Error Mean Orbit Rate Error (Calculated according to Equation 8.1.2.1.21-1) | Standard Deviation Orbit Error Standard Deviation Orbit Rate Error (Calculated according to Equation 8.1.2.1.21-1) | Probability of Onset of Constellation Fault Probability of Onset of Satellite Fault Mean Constellation Fault Duration Mean Satellite Fault Duration | Orbit Range Error Correlation Time Orbit Range Rate Error Correlation Time |
| Clock | SSR Clock Corrections | Mean Clock Error Mean Clock Rate Error | Standard Deviation Clock Error Standard Deviation Clock Rate Error | Clock Range Error Correlation Time Clock Range Rate Error Correlation Time | ||
| Code Bias | SSR Code Bias | Mean Code Bias Error Mean Code Bias Rate Error | Standard Deviation Code Bias Error Standard Deviation Code Bias Rate Error | |||
| Phase Bias | SSR Phase Bias SSR Satellite PCV Residuals | Mean Phase Bias Error Mean Phase Bias Rate Error | Standard Deviation Phase Bias Error Standard Deviation Phase Bias Rate Error | |||
| Ionosphere | SSR STEC Correction | Ionosphere DNU | Mean Ionospherre Error Mean Ionospherre Rate Error | Standard Deviation Ionosphere Error Standard Deviation Ionosphere Rate Error | Probability of Onset of Ionosphere Fault Mean Ionosphere Fault Duration | Ionosphere Range Error Correlation Time Ionosphere Range Rate Error Correlation Time |
| Troposphere Vertical Hydro Static Delay | SSR Gridded Corrections | Troposphere DNU | Mean Troposphere Vertical Hydro Static Delay Error Mean Troposphere Vertical Hydro Static Delay Rate Error | Standard Deviation Troposphere Vertical Hydro Static Delay Error Standard Deviation Troposphere Vertical Hydro Static Delay Rate Error | Probability of Onset of Troposphere Fault Mean Troposphere Fault Duration | Troposphere Range Error Correlation Time Troposphere Range Rate Error Correlation Time |
| TroposphereVertical WetDelay | Mean Troposphere Vertical Wet Delay Error Mean Troposphere Vertical Wet Delay Rate Error | Standard Deviation Troposphere Vertical Wet Delay Error Standard Deviation Troposphere Vertical Wet Delay Rate Error | ||||
8.1.2.2 可从UE传输到LMF的信息
8.1.2.2.0 概述
可从UE发送到LMF的信号信息列在表8.1.2.2.0-1中。
Table 8.1.2.2.0-1: Information that may be transferred from UE to the LMF
| Information | UE‑assisted | UE‑based/standalone |
| Latitude/Longitude/Altitude, together with uncertainty shape | No | Yes |
| Velocity, together with uncertainty shape | No | Yes |
| Reference Time, possibly together with GNSS to NG-RAN time association and uncertainty | Yes | Yes |
| Indication of used positioning methods in the fix | No | Yes |
| Code phase measurements, also called pseudorange | Yes | No |
| Doppler measurements | Yes | No |
| Carrier phase measurements, also called Accumulated Delta Range (ADR) | Yes | No |
| Carrier-to-noise ratio of the received signal | Yes | No |
| Measurement quality parameters for each measurement | Yes | No |
| Additional, non-GNSS related measurement information | Yes | No |
| Protection Level, optionally together with achievable Target Integrity Risk | No | Yes |
8.1.2.2.1 GNSS测量信息
8.1.2.2.1.0 概述
从UE报告到LMF的GNSS测量信息取决于GNSS模式(即,基于UE的、自主的(独立的)或UE辅助的)。
8.1.2.2.1.1 基于UE的模式
在基于UE或独立模式下,GNSS接收器报告纬度、经度以及可能的高度,以及位置不确定性的估计值(如果可用)。
如果LMF请求且UE支持,GNSS接收器可以报告其速度,以及可能的不确定性的估计值(如果可用)。
如果LMF请求且UE支持,GNSS接收器可以报告GNSS系统时间(其中特定GNSS由GNSS ID指示;特定GNSS系统时间可以由UE选择)与NG-RAN空中接口定时的关系。此信息可以被LMF用来辅助网络中的其他UE。
UE还应报告一个指示,表明哪些GNSS和可能的其他定位方法已被用来计算定位。
8.1.2.2.1.2 UE辅助模式
在UE辅助模式下,GNSS接收器报告码相位和多普勒测量值以及相关的质量估计值。这些测量值使LMF能够计算UE的位置,可能还使用其他测量值和数据。
如果LMF请求且UE支持,GNSS接收器可以报告载波相位测量值(也称为累积增量范围),以及相关的质量测量值(如果可用)。
如果LMF请求且UE支持,GNSS接收器可以报告GNSS系统时间(其中特定GNSS由GNSS ID指示;特定GNSS系统时间可以由UE选择)与NG-RAN空中接口定时的关系。此信息可以被LMF用来辅助网络中的其他UE。
8.1.2.2.2 额外的非GNSS相关信息
NG-RAN或UE执行的额外的非GNSS测量值可以被LMF或UE用来计算或验证位置估计值。这些信息可能包括OTDOA定位测量值、路径损耗和信号强度相关测量值等。
8.1.3 辅助-GNSS定位程序
8.1.3.1 能力转移程序
辅助-GNSS定位的能力转移程序在条款7.1.2.1中描述。
8.1.3.2 辅助数据转移程序
8.1.3.2.0 概述
此程序的目的是使LMF能够提供辅助数据给UE(例如,作为定位程序的一部分),并使UE能够请求LMF的辅助数据(例如,作为定位程序的一部分)。在高精度GNSS定位技术(例如,RTK)的情况下,LMF可以主动向UE提供周期性辅助数据,并且UE可以请求LMF的周期性辅助数据。
8.1.3.2.1 LMF启动的辅助数据交付
图8.1.3.2.1-1显示了当LMF启动程序时,网络辅助GNSS方法的辅助数据交付操作。

Figure 8.1.3.2.1-1: LMF-initiated Assistance Data Delivery Procedure
(1) LMF确定需要向UE提供辅助数据(例如,作为定位程序的一部分),并向UE发送LPP提供辅助数据消息。此消息可能包括条款8.1.2.1中定义的任何GNSS辅助数据。
8.1.3.2.1a LMF启动的周期性辅助数据交付
周期性辅助数据交付程序允许服务器向目标提供主动周期性辅助数据,如图8.1.3.2.1a-1所示。
注:在本版本的规范中,周期性辅助数据交付仅支持HA GNSS(例如,RTK)定位。
 Figure 8.1.3.2.1a-1: LPP Periodic Assistance data delivery procedure
Figure 8.1.3.2.1a-1: LPP Periodic Assistance data delivery procedure
(1) LMF确定需要向UE提供辅助数据,并向UE发送LPP提供辅助数据消息。该消息包括用于识别周期性辅助数据类型的信息和用于结束辅助数据传递的持续时间。该消息表示控制事务的结束。
(2) 当第一个周期性消息可用时,LMF会向UE发送一个未经请求的LPP提供辅助数据消息,其中包含在步骤(1)中宣布的周期性辅助数据。
(3) 当每个额外的周期性条件发生时,LMF可能会继续向目标发送包含步骤(1)中宣布的周期性辅助数据的更多LPP提供辅助数据消息。当结束周期性辅助数据传输的持续时间到达时,最后传输的LPP提供辅助数据消息表示事务的结束。另外,可以根据UE的请求或在LMF的帮助下使用中止消息来结束会话。
8.1.3.2.2 UE启动的辅助数据传输
图8.1.3.2.2-1显示了当程序由UE启动时,网络辅助GNSS方法的辅助数据传输操作。

Figure 8.1.3.2.2-1: UE-initiated Assistance Data Transfer Procedure
(1) UE确定需要某些A-GNSS辅助数据(例如,作为定位程序的一部分,当LMF提供的辅助数据不足以满足UE的请求时),并向LMF发送LPP请求辅助数据消息。该请求包括针对每个GNSS请求的具体A-GNSS辅助数据的指示,可能还包含附加信息(例如,针对哪些GNSS信号类型、卫星或请求辅助的时间等)。关于UE的大致位置以及服务小区和相邻小区的其他信息也可能在请求辅助数据消息中和/或伴随的提供位置信息消息中提供,以帮助LMF提供适当的辅助数据。这些附加数据可能包括UE的最后已知位置(如果可用)、UE服务的NG-RAN节点以及可能的相邻NG-RAN节点的小区ID,以及E-UTRA E-CID测量值。
(2) 如果LMF上可用,LMF将在LPP提供辅助数据消息中提供所请求的辅助数据。整个辅助数据集可以在一个或多个LPP消息中传送,例如每个GNSS一个消息。在这种情况下,LMF可能会多次重复此步骤。如果在步骤(2)中没有提供UE在步骤(1)中请求的任何辅助数据,则UE应假定所请求的辅助数据不受支持,或当前在LMF上不可用。如果LMF无法提供UE在步骤(1)中请求的任何辅助数据,则应返回可以在类型为“提供辅助数据”的LPP消息中提供的任何信息,其中包括未提供辅助数据的原因指示。
8.1.3.2.2a UE启动的周期性辅助数据传输
图8.1.3.2.2a-1显示了当程序由UE启动时,高精度GNSS方法(例如RTK)的周期性辅助数据传输操作。
注:在本版本的规范中,周期性辅助数据传输仅支持HA GNSS(例如RTK)定位。

Figure 8.1.3.2.2a-1: UE-initiated Periodic Assistance Data Transfer Procedure
(1) UE确定需要周期性辅助数据,并向LMF发送LPP请求辅助数据消息。该请求包括所请求的特定辅助数据的指示以及附加信息,例如发送辅助数据的期望周期和结束周期性辅助数据传输会话的持续时间。
(2) LMF通过向UE发送LPP提供辅助数据消息进行响应。如果UE的请求可以得到支持,该消息将包含可能确认或重新定义在步骤(1)中请求的辅助数据类型或周期性参数的信息。此响应表示控制事务的结束。
(3) 当可用时,LMF在LPP提供辅助数据消息中向UE提供所请求的辅助数据。如果在步骤(1)中请求或在步骤(2)中重新定义的任何辅助数据未提供,则UE假定所请求的辅助数据不受支持,或当前在LMF上不可用。
(4) LMF可以向UE发送一个或多个额外的LPP提供辅助数据消息,其中包含步骤(2)中确认或重新定义的进一步周期性辅助数据。当结束周期性辅助数据传输的持续时间到达时,最后传输的LPP提供辅助数据消息表示事务的结束。另外,可以根据UE的请求或在LMF的帮助下使用中止消息来结束周期性辅助数据传输会话。
8.1.3.3 位置信息传输程序
8.1.3.3.0 概述
此程序的目的是使LMF能够从UE请求位置测量或位置估计,或者使UE能够向LMF提供位置测量以进行位置计算。
8.1.3.3.1 LMF启动的位置信息传输程序
图8.1.3.3.1-1显示了当程序由LMF启动时,网络辅助GNSS方法的位置信息传输操作。

Figure 8.1.3.3.1-1: LMF-initiated Location Information Transfer Procedure
(1) LMF向UE发送LPP请求位置信息消息,以调用A-GNSS定位。该请求包括定位指令,例如GNSS模式(UE辅助、UE基于、UE基于优先但允许UE辅助、UE辅助优先但允许UE基于、独立)、定位方法(GPS、Galileo、GLONASS、BDS、NavIC等,以及可能的非GNSS方法,如OTDOA定位或E-CID定位)、请求的任何特定UE测量,例如精细时间辅助测量、速度、载波相位、多频测量、服务质量参数(精度、响应时间),以及可能的完整性要求。
(2) UE执行请求的测量,并可能计算其自身的位置。UE还可以确定计算位置的完整性结果。在步骤(1)中提供的响应时间结束之前,UE向LMF发送LPP提供位置信息消息。如果UE无法执行请求的测量,或者在获得任何请求的测量之前步骤1中提供的响应时间已经结束,则UE返回可以在类型为“提供位置信息”的LPP消息中提供的任何信息,其中包括未提供位置信息的原因指示。
8.1.3.3.2 UE发起的位置信息传送程序
图8.1.3.3.2-1显示了当程序由UE启动时,UE辅助GNSS方法的位置信息传送操作。
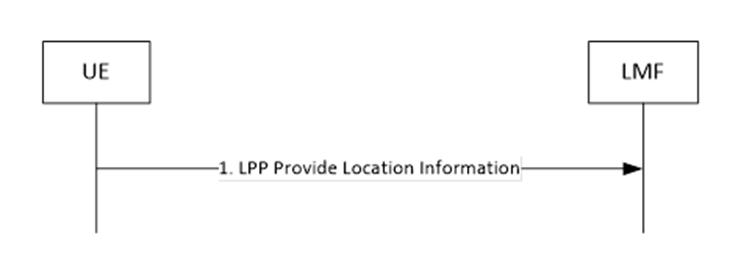
Figure 8.1.3.3.2-1: UE-initiated Location Information Delivery Procedure
(1) UE向LMF发送LPP提供位置信息消息。提供位置信息消息可以包括UE上已经可用的任何UE测量值(GNSS伪距、载波相位距以及其他测量值)。