在一个数据序列中查找某一个数据元素,是数据管理时经常涉及的,通常以比较的方式来完成,典型的案例有无序序列的暴力查找(O(N))、有序序列的二分查找(O(logN))、平衡搜索树(O(logN))等。但它们所处理的数据元素,与其所在序列中的存储位置并没有明确的关系,数据元素在序列中的位置是随机的。因此在查找某一个数据时,可能需要进行数次的数据比较,也就是说,它们的查找效率往往取决于查找过程中数据元素的比较次数。而当数据达到一定量级,继续通过比较的方式,显然查找的代价较大且效率较低,情况并不理想。而最理想的情况应当是直接就能找到需要的数据。那么,是否存在一种更高效的方案,可以不通过比较,就直接找到一个数据呢?
20世纪50年代,德国计算机科学家汉斯·彼得·卢恩(Hans Peter Luhn)为计算机解读信息、快速搜索信息提供了一种新的、被称为哈希函数(Hash Function,或称散列函数)的方案。数据元素通过哈希函数可以得到其在序列中的存储位置,使每一个数据元素与其所在序列中的存储位置建立起一个映射关系,模拟出“每一个数据元素在序列中的位置是确定的”;存储位置通过哈希函数可以还原成数据元素的值,模拟出“每一个数据元素都可以被直接访问”(最快能达到O(1))。而由“数据元素-哈希函数-存储位置”构造的数据结构,就称为哈希表(Hash table,或称散列表)。
本篇博客梳理了哈希思想和相关数据结构,并搭配对STL源码中线性探测、哈希桶、位图、布隆过滤器的模拟实现,旨在更好地帮助读者理解哈希的功能和适用情景。
目录
一、常见的哈希函数
1.直接定址法(最常用)
2.除留余数法(最常用)
3.平方取中法
4.折叠法
5.随机数法
6.数学分析法
二、哈希冲突与解决方法
1.哈希冲突
2.闭散列
2-1.线性探测
2-2.二次探测
3.闭散列的模拟实现
3-1.基本结构
3-2.插入
3-3.查找和删除
3-4.完整代码
4.开散列
5.开散列的模拟实现
5-1.基本结构
5-2.查找
5-3.插入
5-4.删除
5-5.特别的析构
5-6.完整代码
三、哈希的应用
1.哈希表
2.位图
2-1.原理与应用
2-2.模拟实现
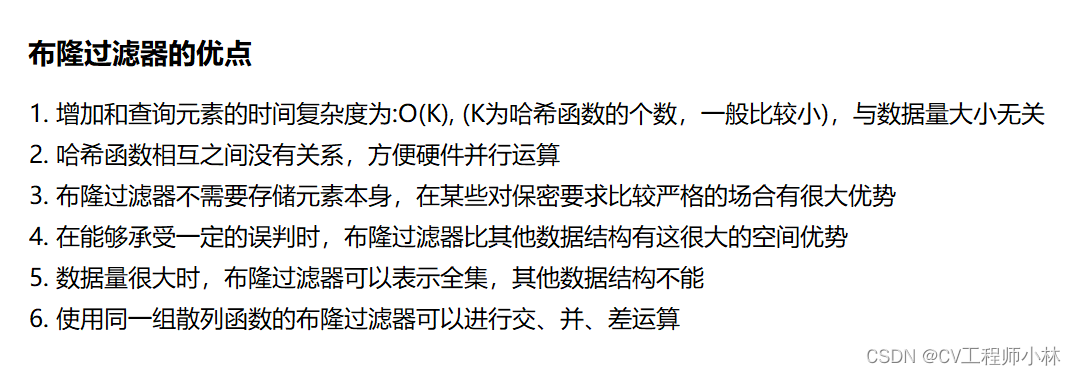
3.布隆过滤器
3-1.原理与应用
3-2.模拟实现
补、海量数据问题
1.位图相关
2.布隆过滤器相关
3.哈希切割
一、常见的哈希函数
哈希函数本质是一个数学表达式,作用是将数据元素的值(或称关键码)转换为数据元素在哈希表中的存储位置(或称哈希地址,最常见的形式是数组下标)。
【补】哈希函数设计原则
- 定义域:必须包含所有要存储的数据元素;
- 值域:当一个哈希表有m个地址的大小时,哈希函数的值域必须在0到m-1之间;
- 通过哈希函数得到的地址能均匀分布在哈希表中;
- 表达式应简洁明了。
1.直接定址法(最常用)
直接定址法的表达式为:
Hash(Key)= A*Key + B
其中,key为数据元素的值, A和B为两个未知数,它们的值视具体情景而定。表达式的结果即为数据元素的存储位置。
直接定址法的表达式十分简洁,结果地址分布较为均匀,但使用前需确定数据元素值的分布情况,适用于数据量小且数据值连续分布(值的分布范围集中)的情景。
最典型的情景多与字符有关,因为字符的分布范围就是连续(集中)的。
例如用一个大小为26的int类型的数组character来存26个英文小写字母,要使character[0]='a',character[1]='b'...只需将小写字母的ASCII码值(a对应97,b对应98)通过
表达式“1 * ASCII码值 - 97 = 数组下标”(“1 * 97 - 97 = 0”,“1 * 98 - 97 = 1”)求得字符'a'、字符'b'...在数组中的下标并存入数组即可。
又例如这道题目“字符串中第一个不重复的字符”,在一个字符串中找到它第一个不重复的字符,并返回它的下标——
class Solution {
public:int firstUniqChar(string s) {unordered_map<int, int> frequency; //unordered_map相当于是map的不排序但去重版本,同样存的是<key, value>//这里的key代表字母的ASCII码,value代表出现次数for (char ch: s) {++frequency[ch]; //将字符的出现次数统计在unordered_map中}for (int i = 0; i < s.size(); ++i) { //将字符从前往后挨个在unordered_map查询,就能找到第一个不重复的字符if (frequency[s[i]] == 1) { //不重复的字符的出现次数为1return i; }}return -1; //没有找到则返回-1}
};//来源:力扣官方题解
2.除留余数法(最常用)
除留余数法的表达式为:
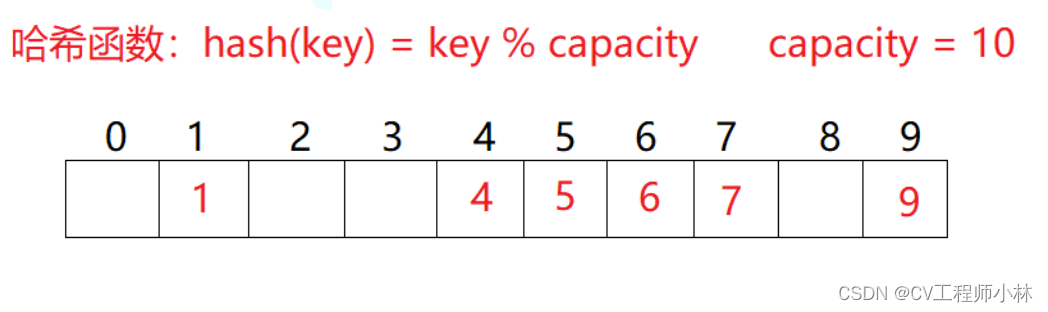
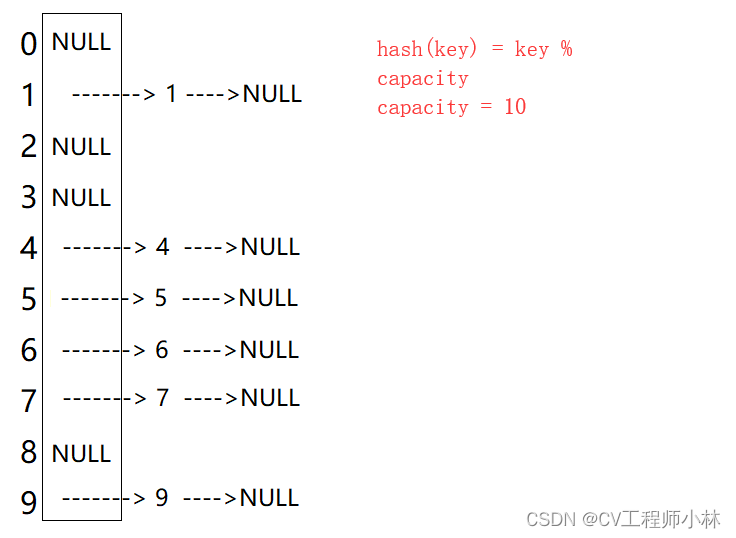
Hash(key) = key % p (p<=m)
其中,key为数据元素的值,m为哈希表的大小(元素个数),p是一个不大于m(或等于m)的质数。表达式的结果即为数据元素的存储位置。
除留余数法适用于值的分布范围分散的情景。
例如要将一个数据集合{1,7,6,4,5,9}存入一个大小为10的int类型的数组中,已知m=10,取p=10,则通过等式“数值 % 10 =下标”可以求得每个数据在数组中的下标。

3.平方取中法
平方取中法适用于数据元素值的分布不明确,但值本身不是特别大的情景,一般取值平方的中间n位作为数据元素的存储位置。
例如一个数据元素的值为1234,值的平方为1522756,取值平方的中间3位,“227”就是它的地址。又例如一个数据元素的值为4321,值的平方为18671041,取值平方的中间3位,“671(或710)”就是它的地址。
4.折叠法
折叠法适合数据元素值的分布不明确,但值本身特别大(位数较多)的情景。它是将数据元素的值从左到右分割成位数相等的几部分(一般最后一部分位数可以稍短),然后将这几部分叠加求和,并按哈希表的大小,取后n位作为数据元素的存储位置。
例如一个数据元素的值为123456,取每3位为一组将值分割为123和459,再将它们叠加求和求得579,取最后一位9作为数据元素的存储位置。
5.随机数法
随机数法适用于数据元素值的长度不相等的情景。取一个随机数函数,将数据元素值通过随机数函数求得的结果作为它的存储位置,通式为Hash(key) = random(key),其中random即为随机数函数。
6.数学分析法
数学分析法适用于数据元素的值特别大(位数较多),且位数本身分布均匀、重复较少的情景。
设有n个d位数,每一位可能有r种不同的符号,这r种不同的符号在各个位上出现的频率不一定 相同,每种符号出现的机会均等,在某些位上分布比较均匀,在某些位上分布不均匀但只有某几种符号经常出现。可根据哈希表的大小,选择其中各种符号分布均匀的若干位作为数据元素的存储位置。
例如要存储某家公司员工登记表,将手机号作为数据元素,选择手机号后四位作为存储位置。
二、哈希冲突与解决方法
1.哈希冲突
例如在除留余数法的案例中,要将一个数据集合{1,7,6,4,5,9}存入一个大小为10的int类型的数组中,每一个数据都恰好有自己独立的存储位置。
若此时再按除留余数法,向数组中放入数据44,则数据44的存储位置为下标4。但下标4的位置先前已经被数据4占用了,称数据44的存储位置与数据4发生了冲突,数据44不能再放在下标4的位置上了。

不同的数据元素值通过哈希函数映射到了相同的存储位置,这一现象被称为哈希冲突。
发生哈希冲突的原因之一可能是,哈希函数设计得不够合理。 哈希函数设计得越精妙,发生哈希冲突的概率就越低。但无论如何防备,哈希冲突都是无法完全避免的,只能通过一些特殊的方式来解决。
一般来说,闭散列和开散列是解决哈希冲突最常用的两种方法。
2.闭散列
闭散列又称开放定址法。当哈希冲突发生时,若哈希表未被装满,就把数据元素按规则存放到冲突位置中的“下一个” 空位置去(其实就是占用别的数据元素的位置,这样做的缺陷是空间利用率往往较低,但这也是哈希的缺陷,本质上是在以空间换时间)。
而寻找下一个空位置的方法,主要有线性探测和二次探测两种。
2-1.线性探测
从冲突位置开始,依次向后探测,直到寻找到下一个空位置为止。

2-2.二次探测
二次探测是基于线性探测的改良。
线性探测存在的缺陷是,当某一个冲突位置上堆积了许多数据元素,那么线性探测的次数就可能会非常之多。二次探测是将每次向后探测的位置由“1,2,3,4”这样的线性变化,变成“1,4,9,16”这样的非线性变化,使得每次产生哈希冲突后,下一个空位分部散乱,再冲突的可能性降低。
3.闭散列的模拟实现
3-1.基本结构
#include<vector>namespace open_address
{enum STATE //枚举体定义存储位置的状态{EXIST, //存在EMPTY, //为空(即不存在,标记这个位置为可覆盖的)DELETE //被删除(标记这个位置为可覆盖的)};template<class K, class V>struct HashData //数据元素{pair<K, V> _kv; //数据元素的值STATE _state = EMPTY; //存储位置的状态(引入状态来更好地管理这个数据元素)};template<class K, class V>class HashTable{public:HashTable() { _table.resize(10); }//构造函数bool Insert(const pair<K, V>& kv); //插入HashData<const K, V>* Find(const K& kv); //查找bool Erase(const K& key); //删除private:vector<HashData<K, V>> _table;//哈希表size_t _n = 0; //存储有效数据个数(存放新数据可能涉及扩容,故定义_n)};}3-2.插入
向哈希表插入一个新的数据元素,既要找到合适的插入位置,又要留意哈希表的容量是否充足,不足则应扩容后再插入。
为了判断哈希表的容量是否充足,前人引入了载荷因子的概念:

【Tips】载荷因子 vs 冲突发生的概率 vs 空间利用率
载荷因子越大,冲突发生的概率越大,空间利用率越高;
载荷因子越小,冲突发生的概率越小,空间利用率越低 。
(ps:哈希表不能等空间全满才扩容,也无法等到空间全满才扩容,而是载荷因子到一定值就扩容。下取载荷因子为0.7。)
//这是两个仿函数
template<class K>
struct DefaultHashFunc
{size_t operator()(const K& key){return (size_t)key; //将const K类型的变量转换成整型变量}
};
template<>
struct DefaultHashFunc<string> //这个仿函数是对专门的类型(string)的特化
{size_t operator()(const string& str){// BKDR(字符串哈希函数)://Q:如何将字符串转化为整型来取模//A:将字符串的每个字符的ASCII码值相加//Q:每个字符相加的ASCII码值相同怎么办?例如,"bacd"、"abcd"、"abbe"等//A:利用BKDR(每个字符相加前,将和*=131后再加字符的ASCII码值)解决冲突size_t hash = 0;for (auto ch : str){hash *= 131;hash += ch;}return hash;}
};
namespace open_address
{//...template<class K,class V, class HashFunc = DefaultHashFunc<K>>class HashTable{//...bool Insert(const pair<K, V>& kv){//step1.检查扩容//if((double)_n/_table.size()>=0.7)if (_n * 10 / _table.size() >= 7) //有效数据个数/表的当前长度>=载荷因子,则需对表扩容{//开辟一个新哈希表size_t newSize = _table.size() * 2; //粗略扩容为旧表长度的2倍HashTable<K, V> newHT;newHT._table.resize(newSize);//遍历旧表,将其重新映射到新表for (size_t i = 0; i < _table.size(); i++){if (_table[i].state == EXIST){newHT.Insert(_table[i]._kv);}}//然后将新表赋给旧表(交换会产生一个随用随弃临时变量,以达到新表赋给旧表的效果)_table.swap(newHT._table); }//step2.线性探测,寻找合适的存放位置HashFunc hf; //仿函数对象size_t hashi = hf(kv.first) % _table.size(); //按除留余数法找到一个哈希地址//ps://1.const K类型的变量本身是无法取模的,通过仿函数转换为整型后便可取模//2. 模capacity()(空间容量)会有访问越界的隐患,因为_n之后的空间其实是无法访问的。故模.size()(有效数据个数)while (_table[hashi]._state == EXIST) //这个位置存在数据元素,说明这是一共冲突位置{//那就继续往后寻找合适的哈希地址++hashi; hashi %= _table.size();//这里再取模是为了让存放位置始终在哈希表内}//找到后将数据元素放在合适的哈希地址_table[hashi]._kv = kv; //放值_table[hashi]._state = EXIST; //改状态为存在//放完后增加表的有效数据个数++_n;return true;}//...};
};3-3.查找和删除
//两个仿函数
template<class K>
struct DefaultHashFunc
{size_t operator()(const K& key){return (size_t)key; //将const K类型的变量转换成整型变量}
};
template<>
struct DefaultHashFunc<string>
{size_t operator()(const string& str){// BKDRsize_t hash = 0;for (auto ch : str){hash *= 131;hash += ch;}return hash;}
};
namespace open_address
{//...template<class K,class V, class HashFunc = DefaultHashFunc<K>>class HashTable{//...//查找HashData<const K, V>* Find(const K& kv){//线性探测HashFunc hf; //仿函数对象size_t hashi = hf(kv) % _table.size();//const K类型的变量本身是无法取模的,通过仿函数转换为整型后便可取模while (_table[hashi]._state != EMPTY) //找到空的位置为止{if (_table[hashi]._state == EXIST //这个位置存在&& _table[hashi]._kv.first == kv) //数据的值也符合条件{return (HashData<const K, V>*) & _table[hashi]; //就说明找到了}//没找到就继续往后找++hashi;hashi %= _table.size();}return nullptr;}//删除bool Erase(const K& key){HashData<const K, V>* ret = Find(); //找到要删除的数据if (ret){ret->_state = DELETE; //标记位置为“被删除”--_n; //有效数据个数-1return true;}return false;}//...};
};3-4.完整代码
#include<vector>template<class K>
struct DefaultHashFunc
{size_t operator()(const K& key){return (size_t)key;}
};
template<>
struct DefaultHashFunc<string>
{size_t operator()(const string& str){// BKDRsize_t hash = 0;for (auto ch : str){hash *= 131;hash += ch;}return hash;}
};namespace open_address
{enum STATE{EXIST,EMPTY,DELETE};template<class K, class V>struct HashData{pair<K, V> _kv;STATE _state = EMPTY;};template<class K, class V, class HashFunc = DefaultHashFunc<K>>class HashTable{public:HashTable(){_table.resize(10);}bool Insert(const pair<K, V>& kv){if (_n * 10 / _table.size() >= 7){size_t newSize = _table.size() * 2;/*vector<HashData> newtable;newtable.resize(newSize);*/HashTable<K, V> newHT;newHT._table.resize(newSize);for (size_t i = 0; i < _table.size(); i++){if (_table[i].state == EXIST){newHT.Insert(_table[i]._kv);}}_table.swap(newHT._table);}HashFunc hf;size_t hashi = hf(kv.first) % _table.size();while (_table[hashi]._state == EXIST){++hashi;hashi %= _table.size();}_table[hashi]._kv = kv;_table[hashi]._state = EXIST;++_n;return true;}HashData<const K, V>* Find(const K& kv){if (Find(kv.first)){return false;}HashFunc hf;size_t hashi = hf(kv) % _table.size();while (_table[hashi]._state != EMPTY){if (_table[hashi]._state == EXIST&& _table[hashi]._kv.first == kv){return (HashData<const K, V>*) & _table[hashi];}++hashi;hashi %= _table.size();}return nullptr;}bool Erase(const K& key){HashData<const K, V>* ret = Find();if (ret){ret->_state = DELETE;--_n;return true;}return false;}private:vector<HashData<K, V>> _table;size_t _n;};}4.开散列
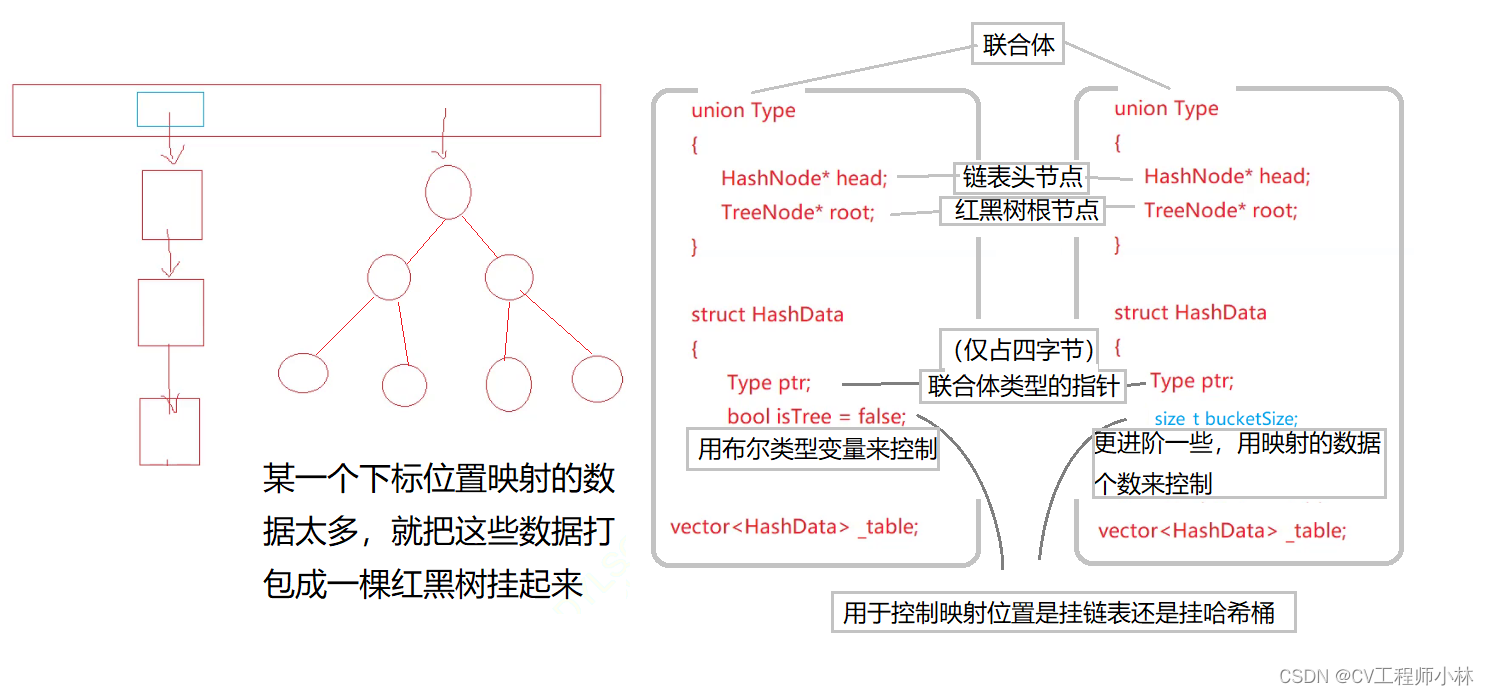
开散列又称为链地址法、拉链法或哈希桶,从逻辑结构上看像是将一个个链表挂在了一个线性表上。

数据元素通过哈希函数可能得到相同的存储位置,从而引发冲突。闭散列将存储位置相同的数据元素归于一个个称为“桶”的子集,每一个“桶”中的数据元素通过一个单链表链接起来,然后将“桶”(链表)的头节点存储在哈希表中。
闭散列处理冲突,需要增设链接指针,似乎增加了存储的负担。但事实上,闭散列要求必须保持大量的空闲空间来确保搜索效率,哈希表的每一项所占空间其实比开散列要求的指针大得多,所以开散列反而比闭散列节省空间资源。
不过,这并不能说明开散列就是完美无缺的。当线性表上挂着的某一条链表太长(也就是说,线性表的某一个下标位置映射的数据太多),也会使搜索效率低下。有一种方案十分巧妙,如果某一个下标位置映射的数据太多,就把这些数据打包成一棵红黑树挂起来。
5.开散列的模拟实现
5-1.基本结构
#include<vector>
namespace hash_bucket
{ //“桶”(链表)节点template<class K, class V>struct HashNode{pair<K, V> _kv;HashNode<K, V>* _next;HashNode(const pair<K, V>& kv):_kv(kv),_next(nullptr){}};//哈希表(哈希桶)template<class K, class V>class HashTable{typedef HashNode<K, V> Node;public:HashTable(){_table.resize(10, nullptr);}private:vector<Node*> _table; // 为了动态地管理数据,哈希表用指针数组来存“桶”(链表)size_t _n = 0; // 有效数据个数};
}5-2.查找
//这是两个仿函数
template<class K>
struct DefaultHashFunc
{size_t operator()(const K& key){return (size_t)key;}
};template<>
struct DefaultHashFunc<string> //特化
{size_t operator()(const string& str){size_t hash = 0;for (auto ch : str){hash *= 131;hash += ch;}return hash;}
};namespace hash_bucket
{template<class K, class V>struct HashNode{pair<K, V> _kv;HashNode<K, V>* _next;//...};template<class K, class V, class HashFunc = DefaultHashFunc<K>>class HashTable{typedef HashNode<K, V> Node;public://...//查找Node* Find(const K& key){HashFunc hf; //仿函数对象//除留余数法寻找数据的哈希地址size_t hashi = hf(key) % _table.size();//找到后,在相应链表中寻找目标数据Node* cur = _table[hashi];while (cur){if (cur->_kv.first == key){return cur;}cur = cur->_next;}return nullptr;}//...};
}5-3.插入
向哈希表插入一个新的数据元素,首先要找到合适的插入位置,也要留意哈希表的容量是否充足,不足则应扩容后再插入,而对于哈希桶而言,通过头插的方式来链接新的数据元素更为简便。
如果不扩容,那么“桶”的个数就是固定的。随着数据元素的不断插入,每个桶中的元素个数会不断增多,可能会导致某一个桶中的链表偏长,从而影响哈希表的搜索性能。因此,在一定条件下需要对哈希表进行扩容。
对于是否扩容的判断,与闭散列类似,引入了载荷因子。但与闭散列不同的是,开散列的载荷因子设为了1。不扩容,不断插入,会使某些“桶”越来越长,让哈希表的搜索性能得不到保障,因此载荷因子应适当大一些(一般控制在1,即在元素个数恰好等于表长/“桶”的个数时,给哈希表扩容),使哈希表在理想情况下,平均每一个“桶”中都有一个数据元素。
//这是两个仿函数
template<class K>
struct DefaultHashFunc
{size_t operator()(const K& key){return (size_t)key;}
};template<>
struct DefaultHashFunc<string> //特化
{size_t operator()(const string& str){size_t hash = 0;for (auto ch : str){hash *= 131;hash += ch;}return hash;}
};namespace hash_bucket
{template<class K, class V>struct HashNode{pair<K, V> _kv;HashNode<K, V>* _next;//...};template<class K, class V, class HashFunc = DefaultHashFunc<K>>class HashTable{typedef HashNode<K, V> Node;public://...//插入bool Insert(const pair<K, V>& kv){//待插入数据在表中已经存在,就不需要插入了if(Find(kv.first)){return false;}//扩容HashFunc hf; //仿函数对象if (_n == _table.size()) //载荷因子到1就扩容{ //开一个新哈希表size_t newSize = _table.size()*2;//此处默认扩容2倍vector<Node*> newTable; newTable.resize(newSize, nullptr);//遍历旧表,将节点(指针)逐个迁到新表中for (size_t i = 0; i < _table.size(); i++){Node* cur = _table[i];while (cur){Node* next = cur->_next; //暂存一下cur的下一个节点//除留余数法确定新的哈希地址size_t hashi = hf(cur->_kv.first) % newSize; // 将旧表桶中的数据(在旧的哈希地址下)头插到新表的桶中(在新的哈希地址下)cur->_next = newTable[hashi];//旧表数据的next指针指向新表中桶的头节点newTable[hashi] = cur; //将刚头插的节点置为新表中桶的头节点指针cur = next; //向后移动,处理下一个数据}_table[i] = nullptr; //别忘了每次要将旧表的桶置空,以防内存泄漏}//然后,交换新表和旧表,以达到新替旧_table.swap(newTable);}//插入size_t hashi = hf(kv.first) % _table.size(); //用除留余数法找哈希地址// 找到后将待插入元素头插在“桶”(链表)中Node* newnode = new Node(kv);newnode->_next = _table[hashi];// 然后将头插的新节点置为哈希表中所存的链表的头节点指针_table[hashi] = newnode;++_n;return true;}//...};
}5-4.删除
//这是两个仿函数
template<class K>
struct DefaultHashFunc
{size_t operator()(const K& key){return (size_t)key;}
};template<>
struct DefaultHashFunc<string> //特化
{size_t operator()(const string& str){size_t hash = 0;for (auto ch : str){hash *= 131;hash += ch;}return hash;}
};namespace hash_bucket
{template<class K, class V>struct HashNode{pair<K, V> _kv;HashNode<K, V>* _next;//...};template<class K, class V, class HashFunc = DefaultHashFunc<K>>class HashTable{typedef HashNode<K, V> Node;public://...//删除bool Erase(const K& key){HashFunc hf; //仿函数对象//除留余数法确定数据在表中的哈希地址size_t hashi = hf(key) % _table.size();//确定后,在相应链表中寻找要删除的数据Node* prev = nullptr; //前驱节点Node* cur = _table[hashi];//目标节点while (cur){ //找到了if (cur->_kv.first == key){ if (prev == nullptr) //是链表的第一个(头)节点就把第二个节点置为新的头节点{_table[hashi] = cur->_next;}else //一般情况,就将cur的前后链接以断开cur{prev->_next = cur->_next;}delete cur; //维护完链表结构,释放cur return true;}//没找到就继续往后找prev = cur;cur = cur->_next;}return false;//找遍了链表也没找到,删除失败}//...};
}5-5.特别的析构
因为每个插入的新节点都是通过new开辟的,所以在HashTable对象析构时,它们需在析构函数中手动释放。
//...namespace hash_bucket
{template<class K, class V>struct HashNode{pair<K, V> _kv;HashNode<K, V>* _next;HashNode(const pair<K, V>& kv):_kv(kv),_next(nullptr){}};template<class K, class V, class HashFunc = DefaultHashFunc<K>>class HashTable{typedef HashNode<K, V> Node;public:HashTable(){_table.resize(10, nullptr);}//析构~HashTable(){//将桶(链表)逐个节点地释放,释放完将桶置空for (size_t i = 0; i < _table.size(); i++){Node* cur = _table[i];while (cur){Node* next = cur->_next;delete cur;cur = next;}_table[i] = nullptr;}}//...private:vector<Node*> _table;size_t _n = 0; };
}5-6.完整代码
#include<vector>
template<class K>
struct DefaultHashFunc
{size_t operator()(const K& key){return (size_t)key;}
};
template<>
struct DefaultHashFunc<string>
{size_t operator()(const string& str){size_t hash = 0;for (auto ch : str){hash *= 131;hash += ch;}return hash;}
};namespace hash_bucket
{template<class K, class V>struct HashNode{pair<K, V> _kv;HashNode<K, V>* _next;HashNode(const pair<K, V>& kv):_kv(kv),_next(nullptr){}};template<class K, class V, class HashFunc = DefaultHashFunc<K>>class HashTable{typedef HashNode<K, V> Node;public:HashTable(){_table.resize(10, nullptr);}~HashTable(){for (size_t i = 0; i < _table.size(); i++){Node* cur = _table[i];while (cur){Node* next = cur->_next;delete cur;cur = next;}_table[i] = nullptr;}}bool Insert(const pair<K, V>& kv){if(Find(kv.first)){return false;}HashFunc hf;if (_n == _table.size()){size_t newSize = _table.size()*2;vector<Node*> newTable;newTable.resize(newSize, nullptr);for (size_t i = 0; i < _table.size(); i++){Node* cur = _table[i];while (cur){Node* next = cur->_next;size_t hashi = hf(cur->_kv.first) % newSize;cur->_next = newTable[hashi];newTable[hashi] = cur;cur = next;}_table[i] = nullptr;}_table.swap(newTable);}size_t hashi = hf(kv.first) % _table.size();Node* newnode = new Node(kv);newnode->_next = _table[hashi];_table[hashi] = newnode;++_n;return true;}Node* Find(const K& key){HashFunc hf;size_t hashi = hf(key) % _table.size();Node* cur = _table[hashi];while (cur){if (cur->_kv.first == key){return cur;}cur = cur->_next;}return nullptr;}bool Erase(const K& key){HashFunc hf;size_t hashi = hf(key) % _table.size();Node* prev = nullptr;Node* cur = _table[hashi];while (cur){if (cur->_kv.first == key){if (prev == nullptr){_table[hashi] = cur->_next;}else{prev->_next = cur->_next;}delete cur; return true;}prev = cur;cur = cur->_next;}return false;}private:vector<Node*> _table; size_t _n = 0; };
}三、哈希的应用
1.哈希表
哈希表是一种能够表示“数据元素-存储位置”这种映射关系的数据结构,理论上,任何具有这种映射关系的数据结构都可以当作哈希表来使用。而它们除了可以用于快速查找,也可以用于统计数目。
常见的例如一个整型数组,当中的元素和元素下标具有一定映射关系,可以用于统计某一个英文字符的出现次数(如上文中,直接定址法中的例子);在这道算法题判定是否互为字符重排
的题目答案中,大小为26的整型数组hash也被用于统计某一个英文字符的出现次数。
//题目答案
class Solution {
public:bool CheckPermutation(string s1, string s2) {if(s1.size()!=s2.size())return false;int hash[26]={0};for(auto ch:s1)hash[ch-'a']++;for(auto ch:s2){hash[ch-'a']--;if(hash[ch-'a']<0)return false;}return true;}
};另外,一个整型数组也可以用于实现计数排序(详见【数据结构】八种常见排序算法)。
又例如容器map,其对存储的<key,value>键值对进行排序和去重,使其可以支持类似英汉词典的功能。
又例如以哈希桶作为底层的容器unordered_set(该容器详解见:【C++】Unordered_map && Unordered_set),在这道算法题存在重复元素的题目答案中,被用于统计数字出现的次数。
//题目答案
class Solution {
public:bool containsDuplicate(vector<int>& nums) {unordered_set<int> hash;for(auto x:nums){if(hash.count(x))return true;else hash.insert(x);}return false;}
};2.位图
2-1.原理与应用
快速查找一个数据是十分常见的数据管理操作,但当数据量十分庞大,例如,要在40亿个无序且不重复的无符号整数中,快速判断某一个无符号整数是否存在,此时又该如何处理,保证查找的效率呢?
不难想到,直接遍历这40亿个数来查找,效率是极低的;如果考虑使用哈希表,将40亿个数存储在一张哈希表中,每个数占4个字节的空间,40亿个数就占了160亿字节(大约16GB)的空间,对系统内存的消耗是极大的,一般的电脑很难承受;如果考虑使用搜索树(例如红黑树),同样的,光存储数据就对系统内存就有极大消耗,更别提构建搜索树本身又附带消耗;而如果将数据全都存在磁盘上,进行外排序和二分查找,空间问题解决了,但时间又很缓慢,效率低下。
其实,只判断某一个数“在不在”,未必先要将这40亿个数全部存起来。“在”或“不在”可以简单地看作“1”或“0”,而一个二进制数都是由“1”或“0”组成的,由此不难联想到,一个二进制数的每一位都与这个二进制数的值有关,也相当于是某一个值“在”或“不在”的标识(例如二进制数要转化为十进制数,它的第一位与2^0有关,第二位与2^1有关)。我们可以仿照这一点,来快速查找一个无符号整数。
无符号整数的数据范围是0到2^32-1。那么,我们可以通过2^32个比特位大小的数组(大约512MB,也就是0.5G),然后将40亿个无符号整数通过直接地址法,映射到对应的下标位置(将无符号整数的值当作下标,且第几号下标也与第几个比特位有关),以此来判断其中某一个无符号整数在不在。
尽管比特位无法作为数组的类型,但我们可以将整型作为数组的类型,并将每一个有32个比特位的整型当作一个组来管理比特位。数组的0号下标存放第一组整型,管理的是第0个到第31个比特位,数组的1号下标存放第二组整型,管理的是第32个到第63个比特位......以此类推。要查询某一个数据的“在”或“不在”的状态,只需确定它映射在数组中的哪一个比特位上;要确定它映射在数组中的哪一个比特位上,只需先确定它映射在第几组整型(即它对应的数组下标是几号),再确定它映射在这组整型的第几个比特位上即可。


像这样的一个数组——涉及位操作,数组下标与某一个数据有映射关系(一般是直接定址法)、与第几个比特位有关,数组元素仅为1和0、用于表示这个数据“在”或“不在”的状态——就是位图。
位图常见的应用情景有:1)快速查找某个数据是否在一个集合中;2)排序 + 去重;3)求两个集合的交集、并集;4)操作系统中磁盘块标记......等等。
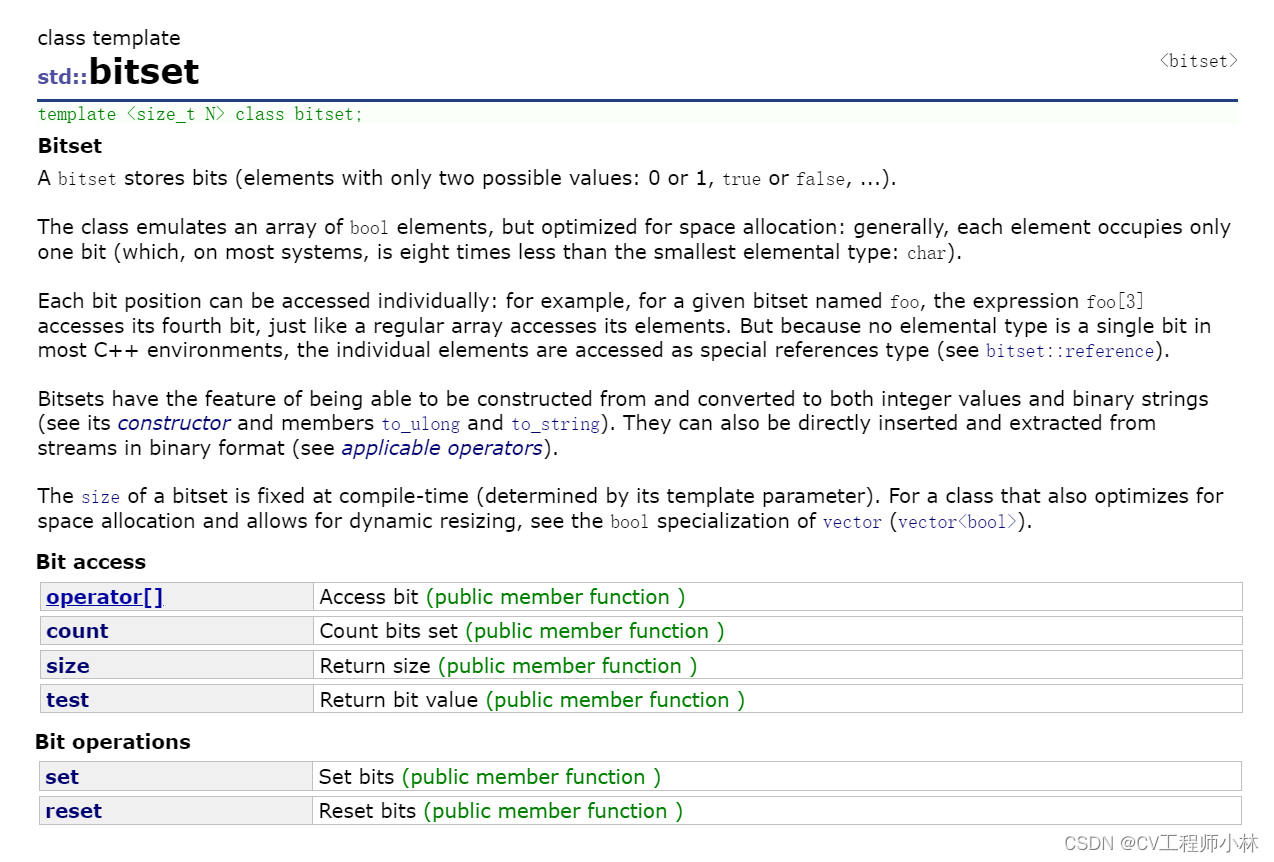
C++库中提供了一个容器bitset,它就是位图,常见的操作有访问、计数、查询、修改等。
2-2.模拟实现
namespace CVE
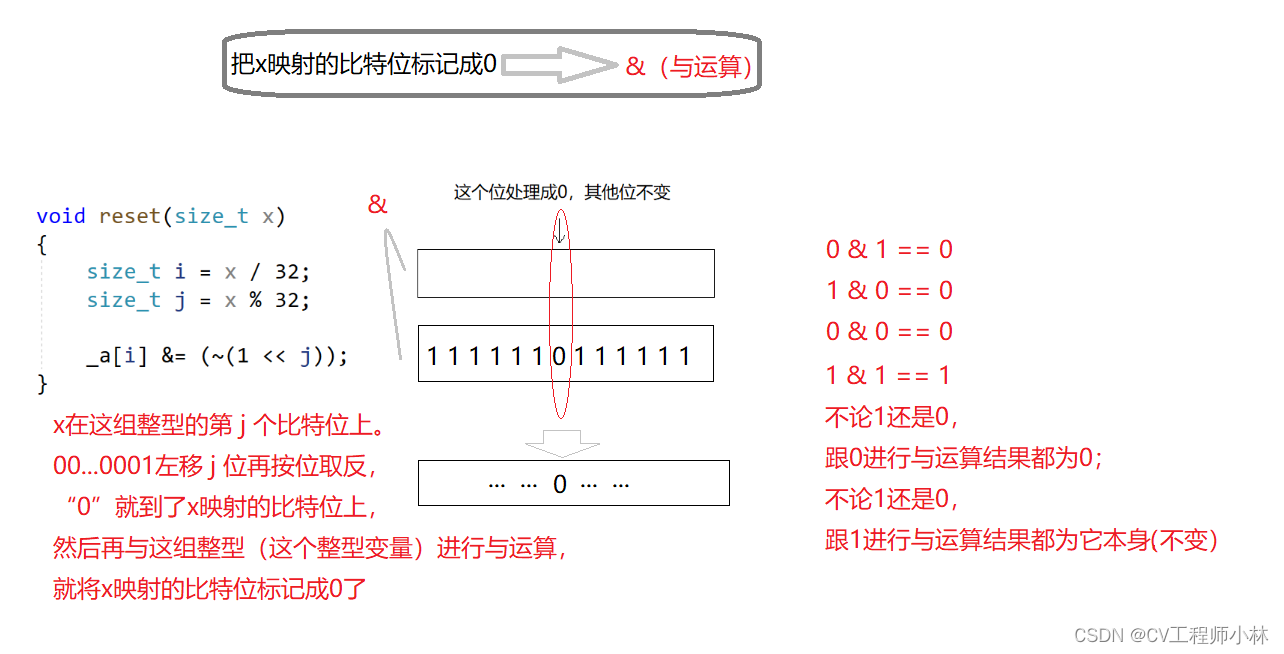
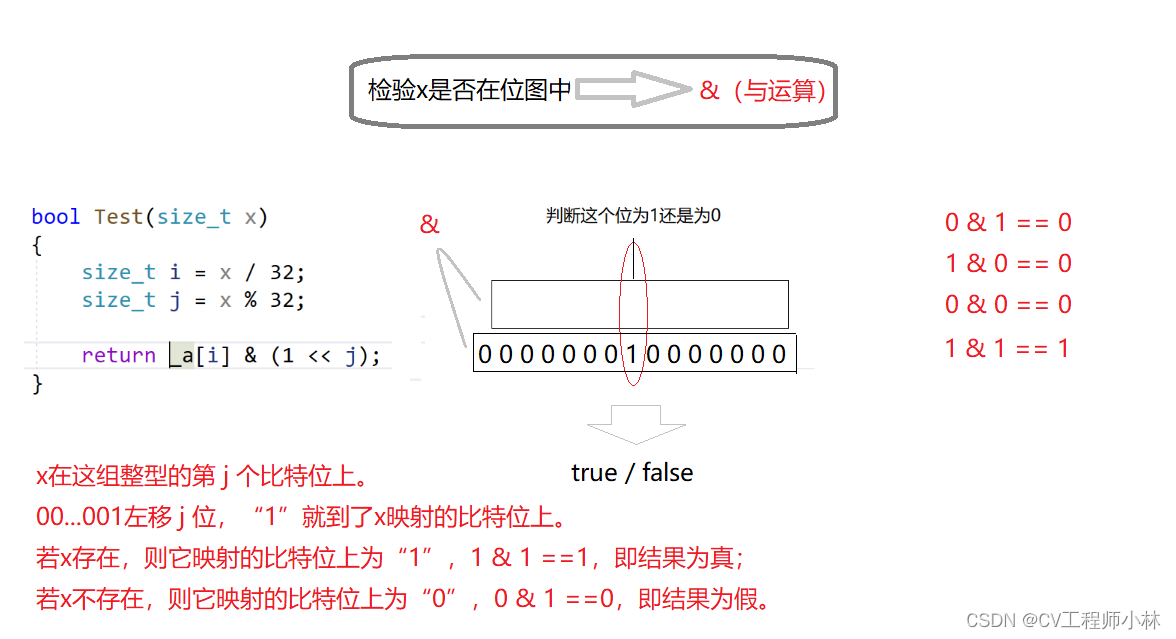
{template<size_t N> //指定位图的大小(bitset< > bt;),N是比特位的数量class bitset{public://构造函数为整型数组申请空间bitset(){_a.resize(N / 32 + 1); //N/32得到整型的数量,+1多申请一个整型以防越界访问(虽然有空间浪费)}// 把x映射的比特位标记成1void set(size_t x){size_t i = x / 32; //先确定x映射在第几组整型(即x对应的数组下标是几号)size_t j = x % 32; //再确定x映射在这组整型的第几个比特位上_a[i] |= (1 << j); //把x映射的比特位标记成1}// 把x映射的比特位标记成0void reset(size_t x){size_t i = x / 32; //先确定x映射在第几组整型(即x对应的数组下标是几号)size_t j = x % 32; //再确定x在这组整型的第几个比特位上_a[i] &= (~(1 << j)); //把x映射的比特位标记成0}// 检验x是否在位图中bool test(size_t x){size_t i = x / 32; //先确定x映射在第几组整型(即x对应的数组下标是几号)size_t j = x % 32; //再确定x映射在这组整型的第几个比特位上return _a[i] & (1 << j); //检验x是否在位图中} private:vector<int> _a; //整型数组};
}
3.布隆过滤器
3-1.原理与应用
1970年,Burton Howard Bloom提出了一种紧凑型的、比较巧妙的概率型数据结构,它被称为布隆过滤器。它的特点是可以高效地插入和查询,可以告知用户 “某样东西一定不存在或者可能存在”。它通过多个哈希函数,将一个数据映射到位图中,此种方式不仅可以提升查询效率,也可以节省大量的内存空间。

面对海量数据,尽管位图有十分出色的表现,但是它仍然存在局限,就是它只能映射整型的数据,而无法处理浮点型、字符串。要解决这个问题,可以仿照上文中闭散列、开散列处理字符串映射的方式,先将浮点型、字符串转换成整型再映射。而这就是布隆过滤器的大致原理。
位图映射的是整型,一个值映射一个位置。但字符串的组合无穷之多,冲突的几率很大,所以,布隆过滤器采取了“一个值映射多个位置”的方式,以此来降低冲突的几率。
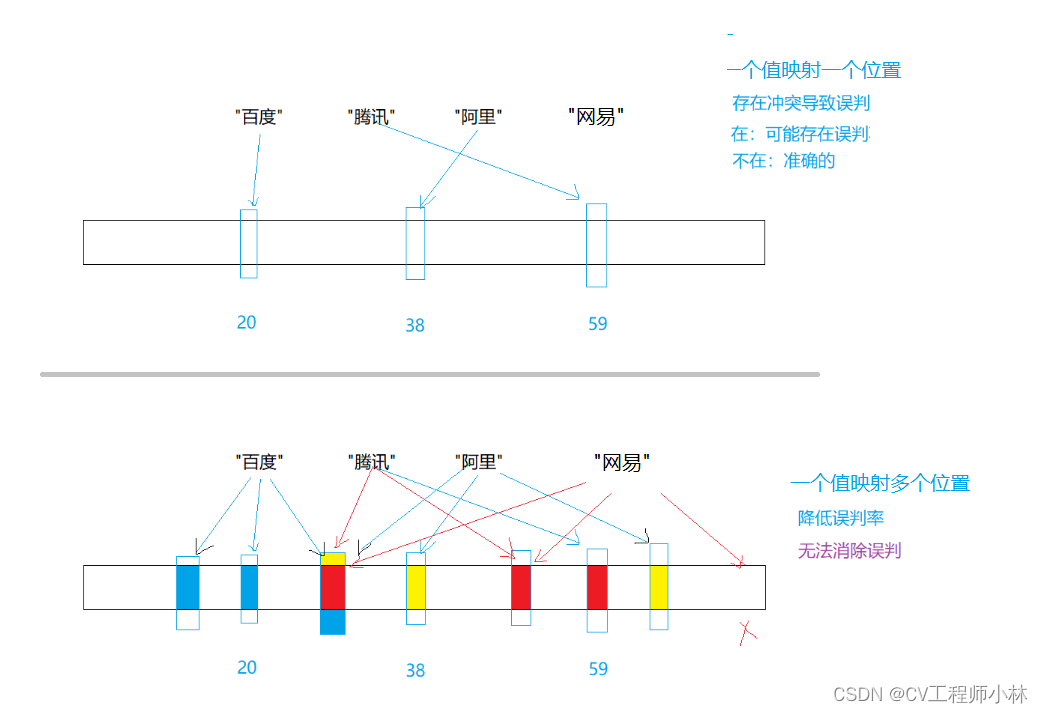
但,布隆过滤器仍存在误判的可能。检验一个字符串是否存在于某个集合,先要将这个字符串通过多个哈希函数转换成的多个数组下标,然后再检验这些下标位置上的值。只有这些下标位置都存的是“1”,才说明这个字符串是存在的,如果其中一个下标是“0”,就说明这个字符串不存在。而万一别的字符串也映射过这些下标,那下标位置上存的就可能都是“1”了。
所以,布隆过滤器判断“一个字符串存在”是可能失误的,但判断“一个字符串不存在”却是始终准确的。
它的应用情景例如,在新用户注册时快速判断一个昵称是否被注册过。在不追求精确的时候,布隆过滤器可以直接告诉用户昵称可不可以用。
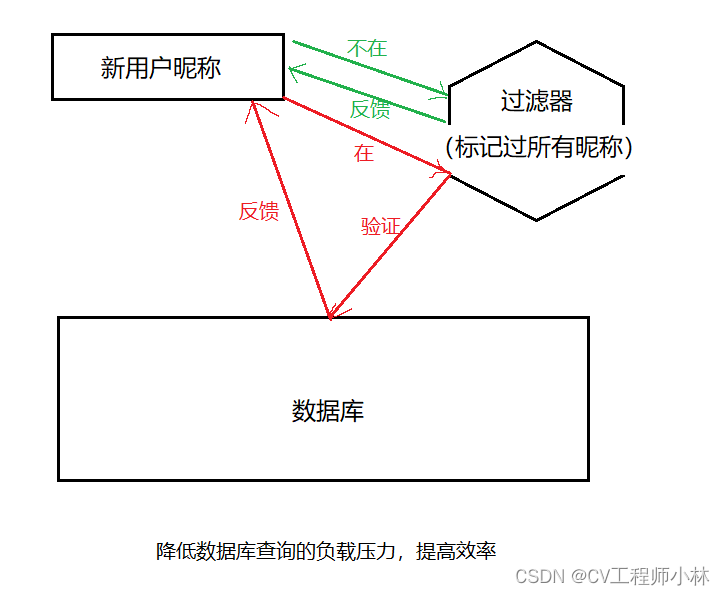
在追求精确的时候,布隆过滤器可以过滤掉“不在”的昵称,剩下“在”的昵称可以进一步到数据库中查验。
如果一个数据被布隆过滤器判断为是不存在,就可以直接告诉用户昵称不可用,要重新想一个昵称;如果被判断为是存在的,再去数据库中查验。这样既保证了判断的准确性,又可以节省了部分去数据库查找的开销(因为数据库在磁盘上,数据读取效率较低,频繁调度开销较大)。
3-2.模拟实现
(关于各种字符串哈希函数的详解,见:字符串哈希算法;关于哈希函数个数、布隆过滤器长度与误判率之间的关系,见:详解布隆过滤器的原理,使用场景和注意事项)
#include<string>
#include<vector>namespace CVE
{//位图template<size_t N>class bitset{public:bitset(){_a.resize(N / 32 + 1);}void set(size_t x){size_t i = x / 32;size_t j = x % 32;_a[i] |= (1 << j);}void reset(size_t x){size_t i = x / 32;size_t j = x % 32;_a[i] &= (~(1 << j));}bool test(size_t x){size_t i = x / 32;size_t j = x % 32;return _a[i] & (1 << j);}private:vector<int> _a;};//以下是三个仿函数//字符串哈希函数1 - BKDR
struct BKDRHash
{size_t operator()(const string& str){size_t hash = 0;for (auto ch : str){hash = hash * 131 + ch;}return hash;}
};//字符串哈希函数2 - AP
struct APHash
{size_t operator()(const string& str){size_t hash = 0;for (size_t i = 0; i < str.size(); i++){size_t ch = str[i];if ((i & 1) == 0){hash ^= ((hash << 7) ^ ch ^ (hash >> 3));}else{hash ^= (~((hash << 11) ^ ch ^ (hash >> 5)));}}return hash;}
};//字符串哈希函数3 - DJB
struct DJBHash
{size_t operator()(const string& str){size_t hash = 5381;for(auto ch : str){hash += (hash << 5) + ch;}return hash;}
};//布隆过滤器
template<size_t N, class K = string,class Hash1 = BKDRHash,class Hash2 = APHash,class Hash3 = DJBHash>
class BloomFilter
{
public://将key映射的多个比特位标记为1void Set(const K& key){//先取映射的下标,再调用位图的接口去标记size_t hash1 = Hash1()(key) % N; //Hash1()是一个匿名的仿函数对象,以下同理_bs.set(hash1);size_t hash2 = Hash2()(key) % N;_bs.set(hash2);size_t hash3 = Hash3()(key) % N;_bs.set(hash3);}//检验key是否存在bool Test(const K& key){//三个映射的比特位但凡有一个存的是0,就说明key不存在size_t hash1 = Hash1()(key) % N;if (_bs.test(hash1) == false)return false;size_t hash2 = Hash2()(key) % N;if (_bs.test(hash2) == false)return false;size_t hash3 = Hash3()(key) % N;if (_bs.test(hash3) == false)return false;//三个映射的比特位放的都是1,才说明key可能存在return true; }private:bitset<N> _bs; //基于位图实现
};}ps:因为删除一个值的标记可能影响其他值,所以布隆过滤器一般不支持删除。
补、海量数据问题
1.位图相关
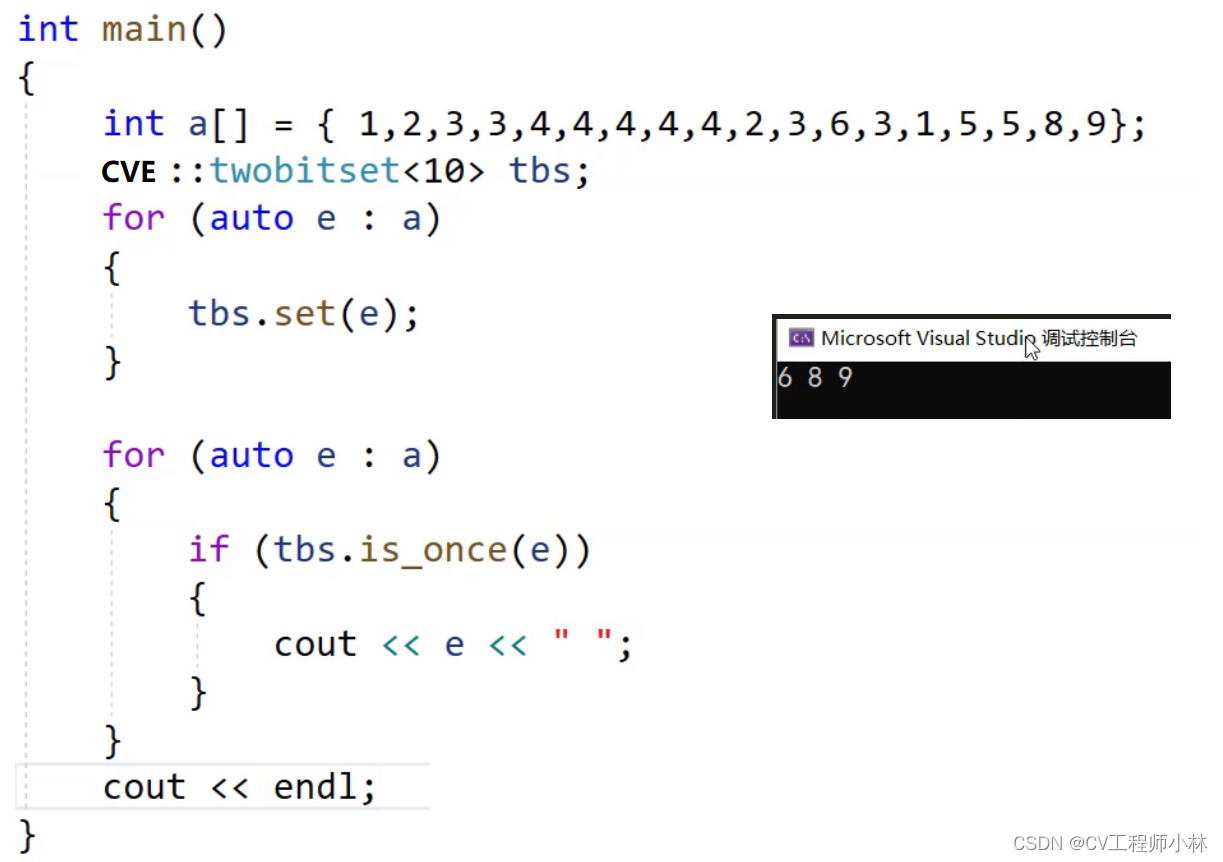
问题1:给定100亿个整数,请设计算法找到只出现一次的整数。
解法1:用两个比特位来标记,00表示数不存在,01表示数出现一次,10表示数出现2次。
解法2:优化解法1,通过两个位图来查找。只出现一次的整数在两个位图中,相应比特位上为一个为“0”、另一个为“1”,这样,只需找到“0”、“1”组合的比特位。
#include<vector>namespace CVE
{//位图template<size_t N>class bitset{public:bitset(){_a.resize(N / 32 + 1);}void set(size_t x){size_t i = x / 32;size_t j = x % 32;_a[i] |= (1 << j);}void reset(size_t x){size_t i = x / 32;size_t j = x % 32;_a[i] &= (~(1 << j));}bool test(size_t x){size_t i = x / 32;size_t j = x % 32;return _a[i] & (1 << j);}private:vector<int> _a;};//双位图template<size_t N>class twobitset{public:// 把x映射的比特位标记成1void set(size_t x){// x不存在(位图1中为0,位图2中也为0),即为00,改00为01if (!_bs1.test(x) && !_bs2.test(x)){_bs2.set(x); //将位图2中的比特位标记为1} // x存在一次(位图1中为0,位图2中为1),即为01,改01为10else if (!_bs1.test(x) && _bs2.test(x)){_bs1.set(x); //将位图1中的比特位标记为1_bs2.reset(x); //将位图2中的比特位标记为0}}// 检验x是否只出现一次bool is_once(size_t x){return !_bs1.test(x) && _bs2.test(x); //x存在一次(位图1中为0,位图2中为1),即为01}private:bitset<N> _bs1; //位图1bitset<N> _bs2; //位图2};
}双位图代码的测试结果:
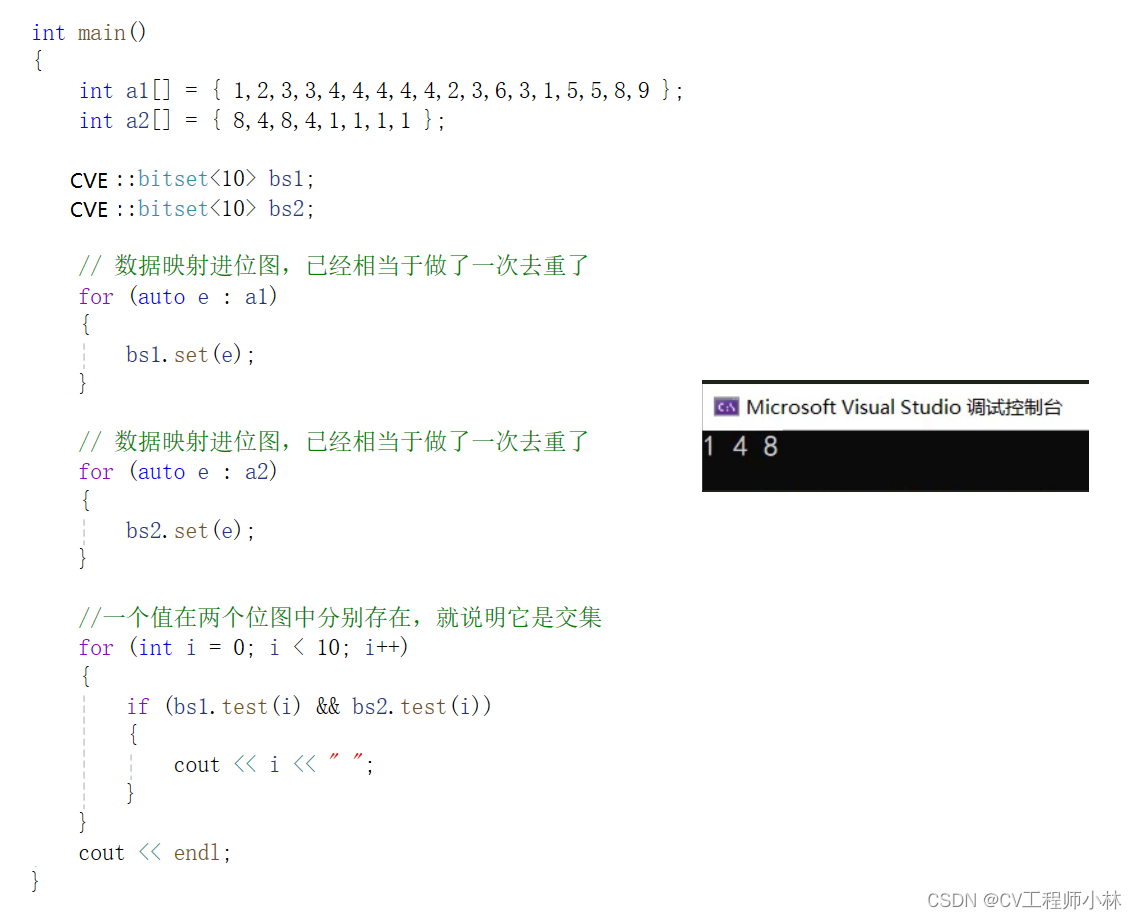
问题2:给两个文件,分别有100亿个整数,我们只有1G内存,如何找到两个文件的交集?
解法:将两个文件的数据分别映射到两个位图,对应位置都为1,那这个位置映射的数据就是交集之一。将两个位图的对应位置&(与运算)一下,得出的结果去重后,就得到两个文件的交集。
#include<vector>namespace CVE
{//位图template<size_t N>class bitset{public:bitset(){_a.resize(N / 32 + 1);}void set(size_t x){size_t i = x / 32;size_t j = x % 32;_a[i] |= (1 << j);}void reset(size_t x){size_t i = x / 32;size_t j = x % 32;_a[i] &= (~(1 << j));}bool test(size_t x){size_t i = x / 32;size_t j = x % 32;return _a[i] & (1 << j);}private:vector<int> _a;};
}位图代码的测试结果:
问题3:某1个文件有100亿个int,我们只有1G内存,请设计算法找到出现次数不超过2次的所有整数。
解法:类似问题1,通过两个位图来查找。00表示数不存在,01表示数出现一次,10表示数出现2次,11表示数出现2次以上。
#include<vector>namespace CVE
{//位图template<size_t N>class bitset{public:bitset(){_a.resize(N / 32 + 1);}void set(size_t x){size_t i = x / 32;size_t j = x % 32;_a[i] |= (1 << j);}void reset(size_t x){size_t i = x / 32;size_t j = x % 32;_a[i] &= (~(1 << j));}bool test(size_t x){size_t i = x / 32;size_t j = x % 32;return _a[i] & (1 << j);}private:vector<int> _a;};//双位图template<size_t N>class twobitset{public:void set(size_t x){// x原先不存在,00->01if (!_bs1.test(x) && !_bs2.test(x)){_bs2.set(x); } // x原先存在一次,01->10else if (!_bs1.test(x) && _bs2.test(x)){_bs1.set(x); _bs2.reset(x); }// x原先存在两次,10->11else if (_bs1.test(x) && !_bs2.test(x)){_bs2.set(x); }}bool not_more_than_twice(size_t x){return !(_bs1.test(x) && _bs2.test(x)); }private:bitset<N> _bs1; //位图1bitset<N> _bs2; //位图2};
}双位图代码的测试结果:

2.布隆过滤器相关
问题1:如何扩展布隆过滤器,使得它支持删除元素的操作?
解法:多个比特位标记一个值,并使用引用计数。将布隆过滤器中的每个比特位扩展成一个小的计数器,插入元素时给k个计数器(k个哈希函数计算出的哈希地址)加一,删除元素时,给k个计数器减一,通过多占用几倍存储空间的代价来增加删除操作。
问题2:给定两个文件,分别有100亿个query(数据库的查询语句,可以理解为字符串),我们只有1G内存,如何找到两个文件交集?分别给出近似算法。
解法:通过一个布隆过滤器。将一个文件的数据存入布隆过滤器中,再检查相应的数据在另一个文件中在不在,在的就是交集。
3.哈希切割
哈希切割:把字符串转为整型,然后对一个范围取模,以此把一个庞大的数据集合分为一个一个小份,方便处理。
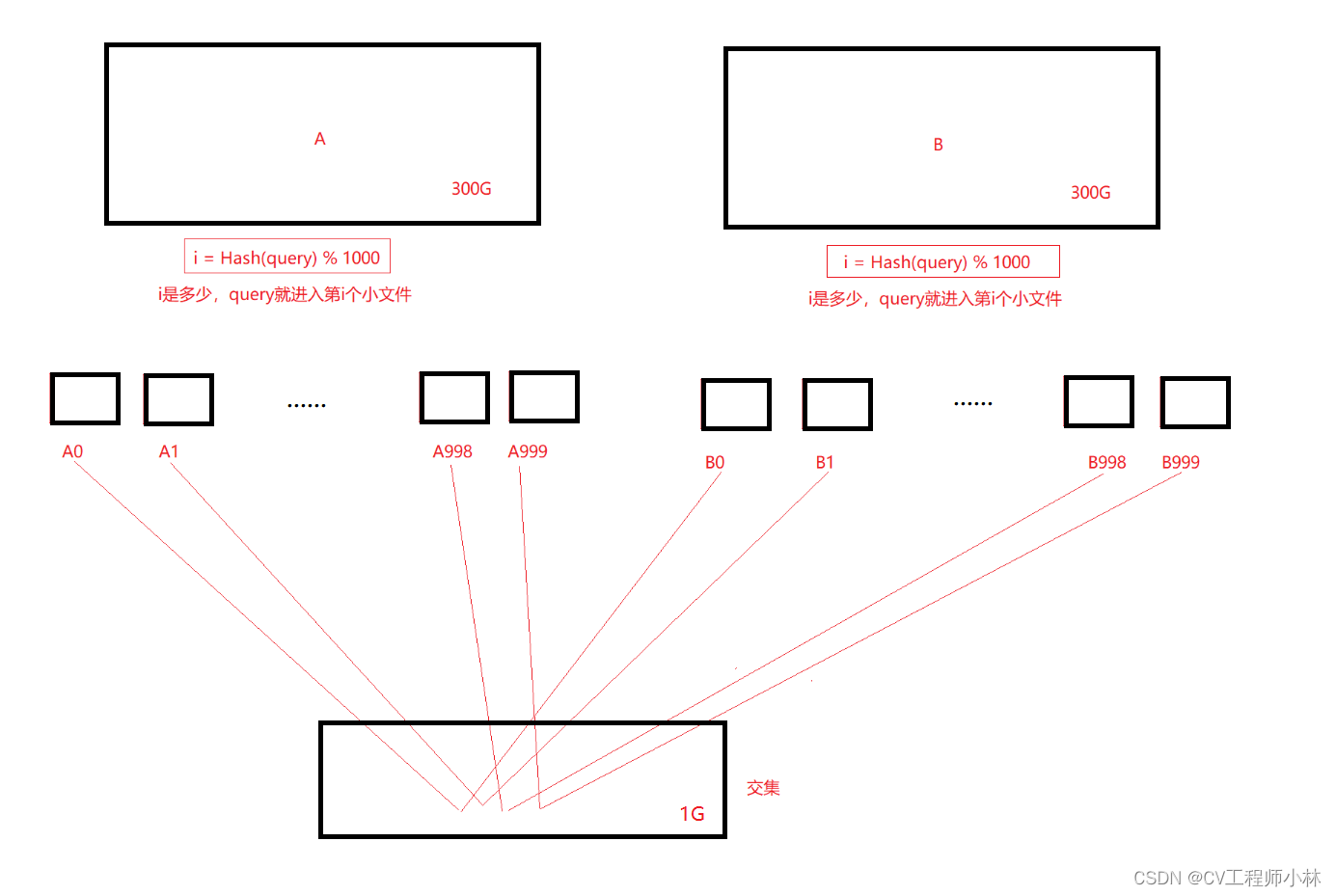
问题1:给定两个文件,分别有100亿个query(数据库的查询语句,可以理解为字符串。100亿个query大约占300G),我们只有1G内存,如何找到两个文件交集?分别给出精确算法。
解法:通过哈希切割,把两个约300G的大文件分成一个一个小份,并给每个小份编号,然后把编号相同的两个小份放入1G内存去找交集。因为映射的缘故,两个大文件中相同的query一定会分别进入编号相同的小份中。
问题2:给定一个超过100G大小的log file, log中存着IP地址, 如何找到出现次数最多的IP地址?如何找到topK个IP?
解法:哈希切割。先将IP地址映射,然后切分成一个一个小份并依次处理,相同的IP一定进入了同一个小份,此时用map去分别统计每个小份中IP地址出现的次数即可。要找到topK个IP,只需汇总每个小份中,每个IP出现的次数,最后用priority_queue即可获取TopK。