工作时分配给我的要实现的功能,写的时候遇到挺多的坑的,在此记录一下
效果
放大缩小的效果
2.编译器扩展窗口记录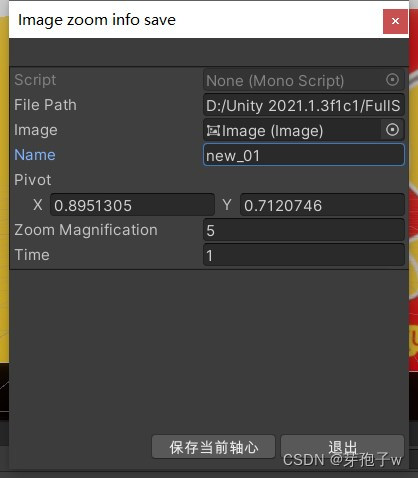
实现点
1.Json序列化存储图片轴心位置, 放大倍率,放大所需要的事件
2.用了编译器扩展工具便于保存轴心信息
坑点
1.Image和RawImage的坐标都是以轴心位置计算的,更改轴心就需要重定位
2.确保画布的分辨率和测试的屏幕分辨率一致
3.计算轴心偏移和别忘记在乘以自己的放大倍率
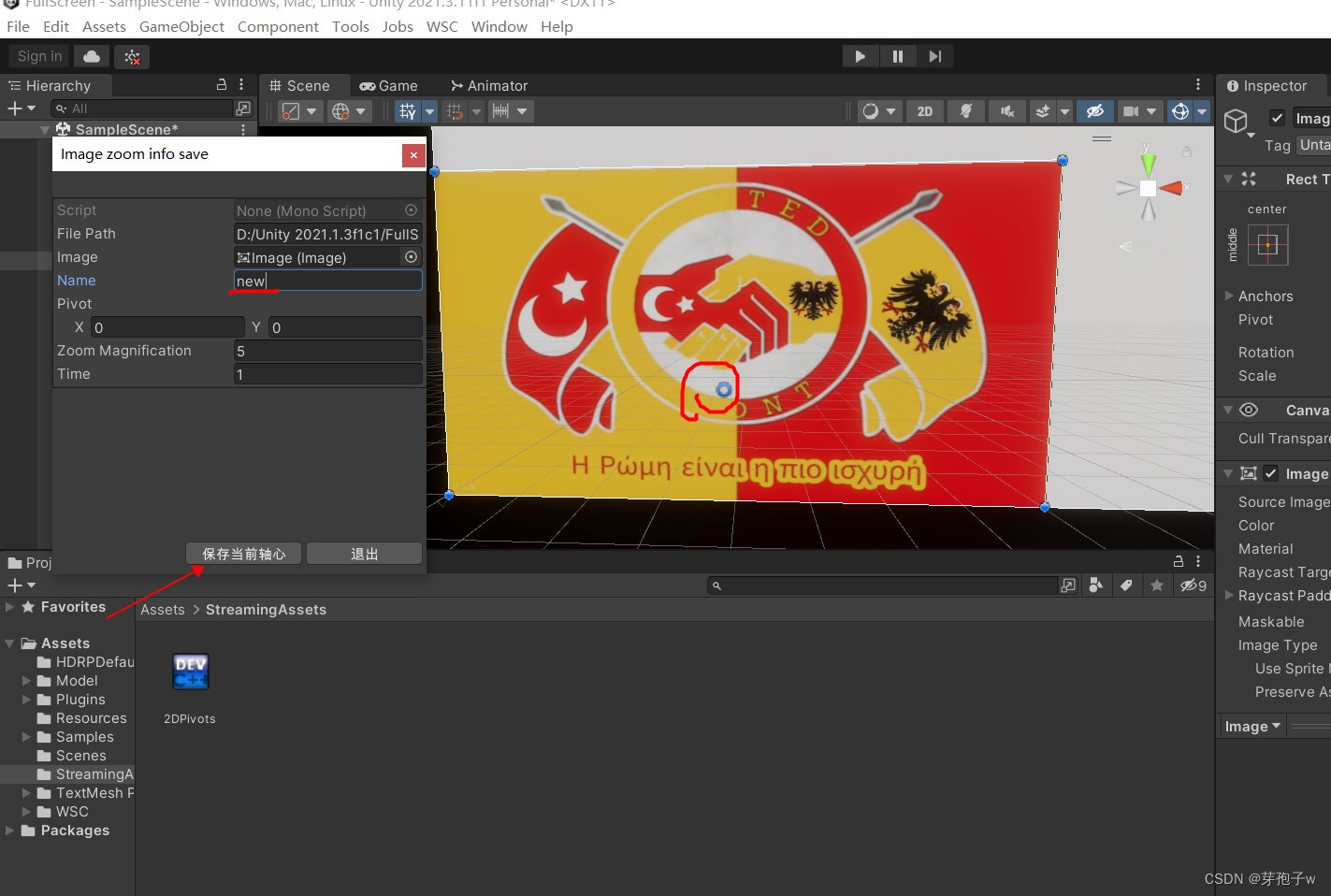
工具的使用
1.打开WSC/保存图片轴心工具,在Image位置挂在需要保存轴心的图像,输出name作为key,并在Scene窗口中直接拖动轴心确定位置(不建议在Inspector中手动输入轴心修改,这样会让图像重定位)
2.程序调用
无论是简化key传入还是传入轴心对象的方式都需要传入要放大的Image


代码
using System;
using System.IO;
using System.Collections;
using System.Collections.Generic;
using UnityEditor;
using UnityEngine;
using UnityEngine.UI;
using DG.Tweening;namespace YBZ
{public class ControlImage : MonoBehaviour{ // 需要控制的图片[Header("2D的图像,如果是视屏改为RawImage进行推流即可")]public Image image;// Start is called before the first frame updatevoid Start(){ if(image == null){if(!TryGetComponent<Image>(out image)){gameObject.AddComponent<Image>();image = GetComponent<Image>();}}rect = image.GetComponent<RectTransform>();// 先读取json中的文件Utility.Instance.ReadData();StartCoroutine(five());}IEnumerator five(){Utility.Instance.ImageZoom(image, Utility.Instance.dict["1"]);yield return new WaitForSeconds(1);Utility.Instance.ImageZoom(image, Utility.Instance.dict["2"]);yield return new WaitForSeconds(1.01f);Utility.Instance.ImageZoom(image, Utility.Instance.dict["3"]);yield return new WaitForSeconds(1.01f);Utility.Instance.ImageZoom(image, Utility.Instance.dict["4"]);yield return new WaitForSeconds(1.01f);Utility.Instance.ImageZoom(image, Utility.Instance.dict["5"]);yield return new WaitForSeconds(3.01f);Utility.Instance.ImageZoom(image, Utility.Instance.dict["6"]);yield return new WaitForSeconds(1.01f);Utility.Instance.ImageZoom(image, Utility.Instance.dict["7"]);yield return new WaitForSeconds(1.51f);Utility.Instance.ImageZoom(image, Utility.Instance.dict["8"]);yield return new WaitForSeconds(1.51f);Utility.Instance.ImageZoom(image, Utility.Instance.dict["9"]);yield return new WaitForSeconds(2.01f);Utility.Instance.ImageZoom(image, Utility.Instance.dict["10"]);yield return new WaitForSeconds(2.01f);Utility.Instance.ImageZoom(image, Utility.Instance.dict["11"]);yield return new WaitForSeconds(2.01f);Utility.Instance.ImageZoom(image, Utility.Instance.dict["12"]);yield return new WaitForSeconds(2.01f);Utility.Instance.ImageZoom(image, Utility.Instance.dict["RESET"]);}// 图片的放大接口public void ZoomEvent(Image image, string key){Utility.Instance.ZoomPivot(image, key);}}// 单例模式// 命名冲突时,请指定命名空间// 使用前一定要读取数据!public class Utility{public static Utility instance;public static Utility Instance { get{if(instance == null) instance = new Utility();return instance;}}// 放大点位置的字典public Dictionary<String, ZoomPoint> dict = new Dictionary<string, ZoomPoint>();//json文件的位置,这个位置默认是在SteamingAssets下的private string jsonFileName ="/2DPivots.json";private string filePath =""; // "StreamingAssets/2Dpivots"public void SetFilePath(string value) => filePath = value;// 写入数据public void WriteDataTest(){Data data = new Data();data.zoomPoints = new List<ZoomPoint>();ZoomPoint point1 = new ZoomPoint{name = "1",pivot = new Vector2(0.75f,0.75f)};ZoomPoint point2 = new ZoomPoint{name = "2",pivot = new Vector2(0.5f,0.5f)};data.zoomPoints[0] = point1;data.zoomPoints[1] = point2;string js = JsonUtility.ToJson(data);// 获取项目路径string fileUrl;if(filePath == ""){fileUrl = Application.streamingAssetsPath + jsonFileName;}else{fileUrl = filePath;}using(StreamWriter sw = new StreamWriter(fileUrl)){ sw.WriteLine(js); //保存数据sw.Close(); sw.Dispose();}} public void WriteData(ZoomPoint zp){Data data = ReadData();if(data != null && data.zoomPoints != null){foreach(var temp in data.zoomPoints){if(temp.name == zp.name){Debug.LogError("轴心名字重复 !(⊙_⊙)?");return;}}}data.zoomPoints.Add(zp);string js = JsonUtility.ToJson(data);// 获取项目路径string fileUrl;if(filePath == ""){fileUrl = Application.streamingAssetsPath + jsonFileName;}else{fileUrl = filePath;}using(StreamWriter sw = new StreamWriter(fileUrl)){ sw.WriteLine(js); //保存数据sw.Close(); // 关闭文档sw.Dispose();}Debug.Log("保存成功(*^▽^*)");}/// <summary>/// 读取数据,在外界不需要接受Data只需要调用即可,返回的Data仅供我自己编写其他程序耦合使用,忽略返回值/// 请在调用dict 前一定要先调用ReadData函数/// </summary>public Data ReadData(){// 获取项目路径string fileUrl;if(filePath == ""){fileUrl = Application.streamingAssetsPath + jsonFileName;}else{fileUrl = filePath;}//读取文件string readDate;using (StreamReader sr = File.OpenText(fileUrl)){readDate = sr.ReadLine();sr.Close();}Data data = JsonUtility.FromJson<Data>(readDate);// 分配内存if(data == null ){data = new Data();data.zoomPoints = new List<ZoomPoint>();return data;}// 数据保存到字典里foreach(ZoomPoint zp in data.zoomPoints){dict.TryAdd(zp.name, zp);}return data;}/// <summary>/// 按点放大轴心,无法捕获动画一定确保放大的动画之间不会冲突,简化了ImageZoom的调用/// </summary>/// <param name="zoomObj">被放大图像</param>/// <param name="key">轴心的名字</param>public void ZoomPivot(Image zoomObj, string key){ImageZoom(zoomObj, dict[key]);}/// <summary>/// 按倍率,轴心定位的方法放大图形,如果目标的轴心不在中心,会在设定完轴心后将目标移动到轴心,/// 需要注意的事,图片的坐标位置是以轴心位置为确定的,也因此放大缩小不改变图像的世界坐标/// </summary>/// <param name="zoomObj">需要方法的图像</param>/// <param name="x">轴心的x</param>/// <param name="y">轴心的y</param>/// <param name="zoomMagnification">放大倍率</param>/// public void ImageZoom(Image zoomObj , ZoomPoint zp){float x = zp.pivot.x;float y = zp.pivot.y;float zoomMagnification = zp.zoomMagnification;float time = zp.time;// 当前和目标按图轴心位置 Vector3 currentPivotPostition = new Vector3(zoomObj.rectTransform.rect.width * zoomObj.rectTransform.pivot.x, zoomObj.rectTransform.rect.height * zoomObj.rectTransform.pivot.y) * zoomMagnification;Vector3 targetPivotPosition = new Vector3(zoomObj.rectTransform.rect.width * x, zoomObj.rectTransform.rect.height * y) * zoomMagnification;zoomObj.rectTransform.pivot = new Vector2(x, y); // 设定轴心zoomObj.transform.position += targetPivotPosition - currentPivotPostition; // 重定位Vector3 targetPostion = zoomObj.transform.position + currentPivotPostition - targetPivotPosition;//位移Translate(zoomObj, targetPostion, time);// 2023.7.30 经过测试,缩放仍然是更具初始轴心,能够达到理想效果不需要将LocalScale恢复为1// 为了结算范围失控的问题,需要将localScale恢复为1,再放大为需要的大小// zoomObj.rectTransform.localScale = new Vector3(1,1,1);Vector3 targetScale = new Vector3(zoomMagnification, zoomMagnification, zoomMagnification);zoomObj.rectTransform.DOScale(targetScale, time);}// 该方法主要是需要将目标点移动到坐标终点public void Translate(Image zoomObj, Vector3 target, float time){// 计算当前轴心和新轴心之间的位置Vector3 current = zoomObj.transform.position;// 移动zoomObj.transform.DOMove(target, time);}}// 数据存储接受类[Serializable]public class Data{// 不能用字典直接存储,可以采用数据列表这样的连续空间// public ZoomPoint[] zoomPoints;// public Dictionary<string, ZoomPoint> zoomPoints;public List<ZoomPoint> zoomPoints;}// 可序列化[Serializable]public class ZoomPoint{// 点名称, 将作为Key被字典存储public string name;// 轴心X坐标public Vector2 pivot = Vector2.one / 2;// 放大倍率,小于1是为缩小倍率,小于0是取绝对值,不允许原点对称缩放,需要保证计算轴心逻辑正确// 默认设为1.5f 放大倍率public float zoomMagnification = 5f;// 改变的需要的时间,默认设为1fpublic float time = 1.0f;public override string ToString(){return $"name = {this.name}, pivot = ({pivot.ToString()}), zoomMagnification = {this.zoomMagnification}, time = {this.time}";}}// 实现编译器窗口扩展public class Editor : ScriptableWizard {// 文件路径public string filePath = Application.streamingAssetsPath + "/2DPivots.json";[SerializeField]public Image image;// 作为轴心点保存定位的Keynew public string name;// 轴心public Vector2 pivot;// 放大倍率public float zoomMagnification = 5f;// 动画时间public float time = 1.0f;[MenuItem("WSC/保存图片轴心")]public static void CreateWizard() {ScriptableWizard.DisplayWizard<Editor>("Image zoom info save","退出", "保存当前轴心");}private int count = 1;void OnWizardCreate(){Utility.Instance.SetFilePath(filePath);Utility.Instance.ReadData();Debug.Log("轴心更新完毕(^-^)V");}void OnWizardOtherButton(){pivot = image.rectTransform.pivot;if (name == null) name = (count++).ToString();ZoomPoint zp = new ZoomPoint{name = this.name,pivot = pivot,zoomMagnification = this.zoomMagnification,time = this.time};// reset image pivotUtility.Instance.WriteData(zp);}}}