根据《国家车联网产业标准体系建设指南》对智能网联汽车定义:智能网联汽车是指搭载先进的车载传感器、控制器、执行器等装置,并融合现代通信与网络技术,实现车与X(人、车、路、云端等)智能信息交换、共享,具备复杂环境感知、智能决策、协同控制等功能,可实现“安全、高效、舒适、节能”行驶,并最终可实现替代人来操作的新一代汽车。
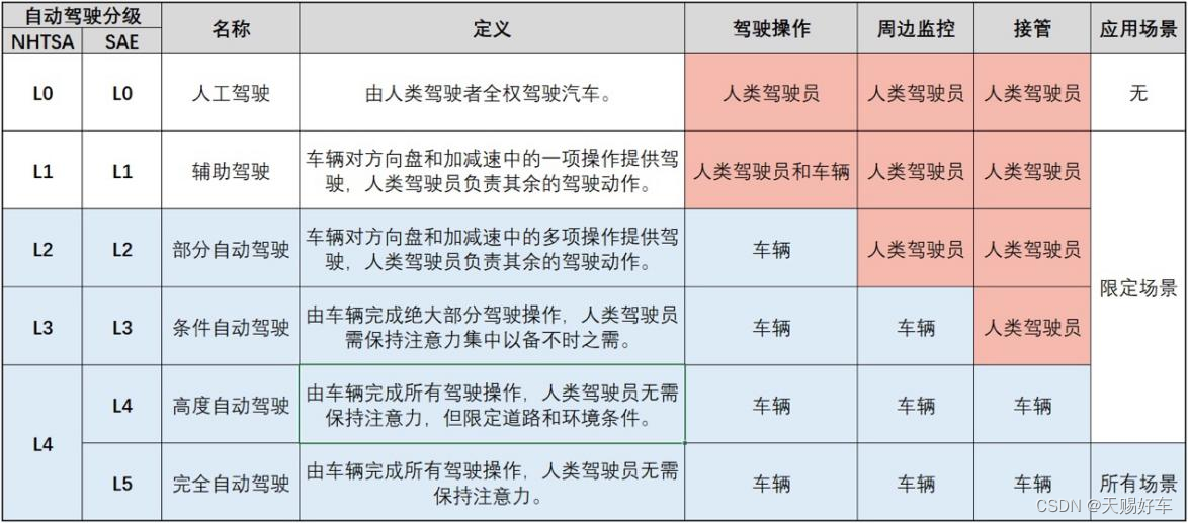
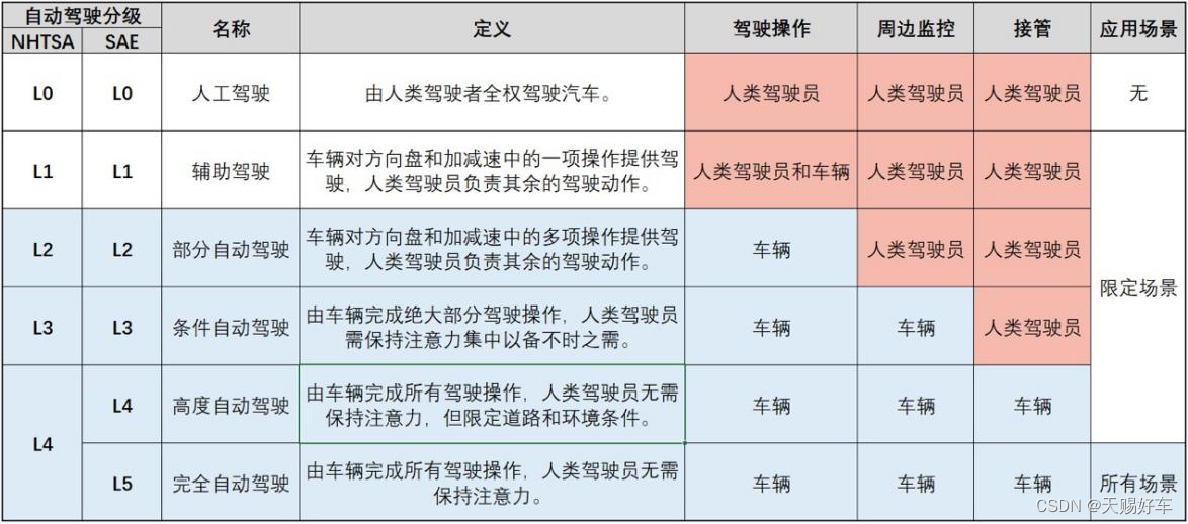
根据我国《智能网联汽车技术路线图》的解释,智能网联汽车具有两个层面:一是智能化,二是网联化。
在智能化层面,汽车配备了多种传感器(摄像头、超声波雷达、毫米波雷达、激光雷达),实现对周围环境的自主感知,通过一系列传感器信息识别和决策操作,汽车按照预定控制算法的速度与预设定交通路线规划的寻径轨迹行驶。
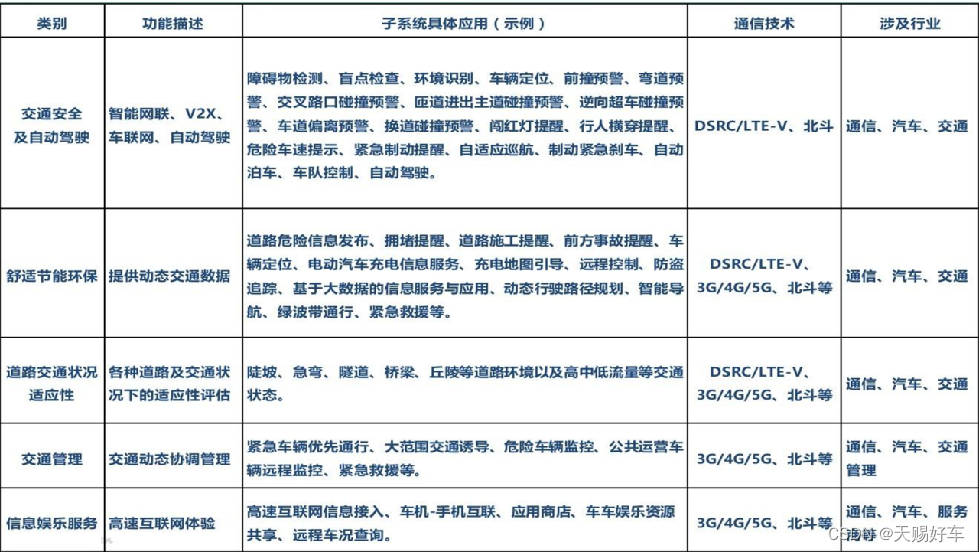
在网联化层面,车辆采用新一代移动通信技术(LTE-V、5G等),实现车辆位置信息、车速信息、外部信息等车辆信息之间的交互,并由控制器进行计算,通过决策模块计算后控制车辆按照预先设定的指令行驶,进一步增强车辆的智能化程度和自动驾驶能力。
自动驾驶汽车集自动控制、体系结构、人工智能、视觉计算等众多技术于一体,是计算机科学、模式识别和智能控制技术高度发展的产物。
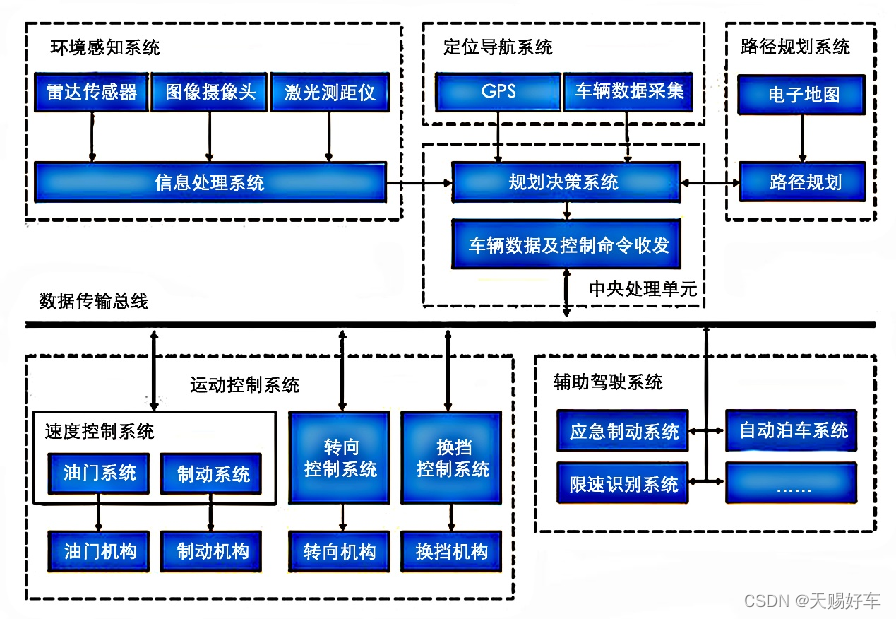
智能网联汽车智能驾驶的核心技术由环境感知层、智能决策层以及控制和执行层组成。
1.环境感知层
环境感知层的主要功能是通过车载环境感知技术、卫星定位技术、4G/5G及V2X无线通信技术等,实现对车辆自身属性和车辆外在属性(如道路、车辆和行人等)静、动态信息的提取和收集,并向智能决策层输送信息。
2.智能决策层
智能决策层的主要功能是接收环境感知层的信息并进行融合,对道路、车辆、行人、交通标志和交通信号等进行识别,决策分析和判断车辆驾驶模式和将要执行的操作,并向控制和执行层输送指令。
3.控制执行层
整个自动驾驶最后一环,是将环境感知、行为决策,路径规划的结论付诸实施的执行阶段,控制车辆的位置、姿态、速度、加速度等,与最新决策相符合。
智能网联汽车通过“信息感知”和“决策控制”,来替代驾驶员的驾驶任务,最终完成全部驾驶任务。
智能网联汽车通过“智能化”“网联化”两条技术路径进行协同,从而实现“感知”和“控制”。
一、ADAS技术概述
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.hqwc.cn/news/54181.html
如若内容造成侵权/违法违规/事实不符,请联系编程知识网进行投诉反馈email:809451989@qq.com,一经查实,立即删除!相关文章
css在线代码生成器
这里收集了许多有意思的css效果在线代码生成器适合每一位前端开发者
布局,效果类:
网格生成器https://cssgrid-generator.netlify.app/ CSS Grid Generator可帮助开发人员使用CSS Grid创建复杂的网格布局。网格布局是创建Web页面的灵活和响应式设计的强…
工作记录------单元测试(持续更新)
工作记录------单元测试
之前的工作中从来没有写过单元测试,新入职公司要求写单元测试, 个人觉得,作为程序员单元测试还是必须会写的 于此记录一下首次编写单元测试的过程。
首先引入单元测试相关的依赖 <dependency><groupId>…

18. SpringBoot 如何在 POM 中引入本地 JAR 包
❤️ 个人主页:水滴技术 🌸 订阅专栏:成功解决 BUG 合集 🚀 支持水滴:点赞👍 收藏⭐ 留言💬 Spring Boot 是一种基于 Spring 框架的轻量级应用程序开发框架,它提供了快速开发应用程…

小程序 view下拉滑动导致scrollview滑动事件失效
小程序页面需要滑动功能
下拉时滑动,展示整个会员卡内容, 下拉view里包含了最近播放:有scrollview,加了下拉功能后,scrollview滑动失败了。 <view class"cover-section" catchtouchstart"handletou…

Mac电脑怎么使用“磁盘工具”修复磁盘
我们可以使用“磁盘工具”的“急救”功能来查找和修复磁盘错误。
“磁盘工具”可以查找和修复与 Mac 磁盘的格式及目录结构有关的错误。使用 Mac 时,错误可能会导致意外行为,而重大错误甚至可能会导致 Mac 彻底无法启动。
继续之前,请确保您…
Java上传文件图片到阿里云OSS
开通阿里云OSS
进入阿里云官网,开通对象存储 OSS服务进入对象存储 OSS管理控制台,在Bucket 列表中创建Bucket 在AccessKey管理中创建AccessKey ID和AccessKey Secret。保存起来,代码中需要
代码开发
pom引入依赖 <!-- 阿里云OSS -->…
python文件与目录操作
目录
文件编码
文件的读取
打开文件
mode常用的三种基础访问模式
读取文件
关闭文件
with open语法
文件的写入操作
文件综合案例
a.txt内容
代码实现
b.txt文件
目录操作
前言
os模块
具体方法
os.path模块
具体方法 文件编码
前言:由于计算机…
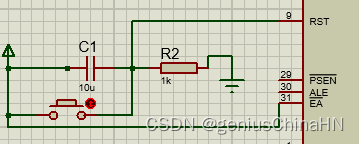
STM32的电动自行车信息采集上报系统(学习)
摘要
针对电动自行车实时监管不便的问题,设计了一种基于STM32的电动自行车信息采集系统,通过获取电池、位置和行驶状态信息并上报到服务器中,实现实时监管。
通过多路串口请求电池、行驶状态和位置信息,以并发方式进行数据接收、…

FBX SDK开发快速上手指南
一段时间以来,我一直想制作一个 FBX Exporter 将 FBX 文件转换为我自己的格式。 整个过程不是很顺利,主要是FBX的官方文档不是很清楚。 另外,由于 FBX 格式被许多应用程序使用,而不仅仅是游戏引擎,因此提供的示例代码没…

【LeetCode 75】第二十题(2215)找出两数组的不同
目录
题目:
示例:
分析:
代码运行结果: 题目: 示例: 分析:
找出两个数组中不一样的数,将nums1中有的数而nums2没有的数放在res[0]中,将nums2中有的数二nums1没有的数放在res[1]中.
那我们…
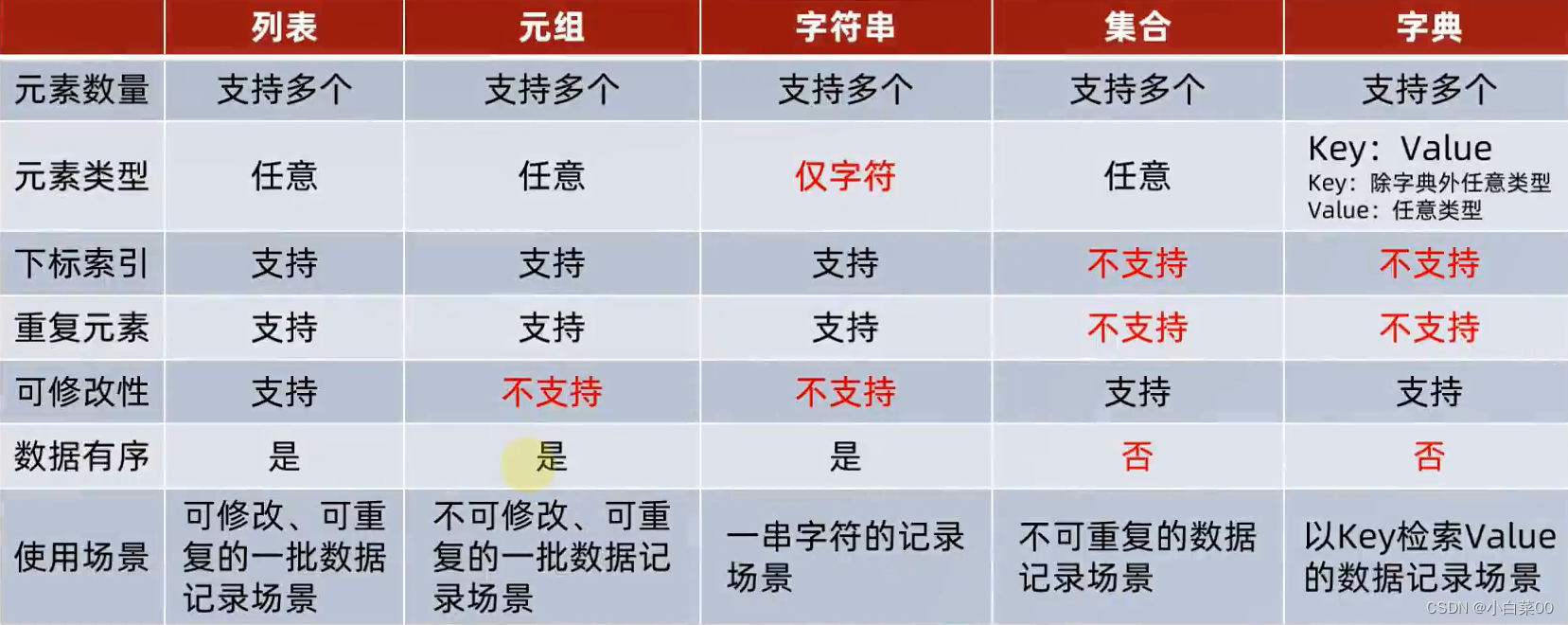
python数据容器
目录
数据容器
反向索引
list列表
语法
案例
列表的特点
列表的下表索引
list的常用操作
list列表的遍历
while循环遍历
for循环遍历
tuple元组
前言
元组定义
元组特点
获取元组元素
元组的相关操作
元组的遍历
while循环遍历
for循环遍历
字符串
前言…