旭日x3派部署自己训练的模型(安全帽识别、视频流推理、yolov5-6.2)windows,框架pytorch,python3.7
- 效果
- 模型训练
- 模型转换
- 1、pt模型文件转onnx
- 2、检查onnx模型
- 3、准备校准数据
- 4、onnx转bin
- 上板视频流推理
- 1、图片推理
- 2、视频流推理
效果
模型训练
进官网可克隆yolov5:https://github.com/ultralytics/yolov5/tree/v6.2,这里选择6.2。数据集直接使用现成的:安全帽识别。
整个训练过程参考:炮哥带你学
需要注意的是这里是6.2,参考博客是5.0,过程会有一些不同,训练时报错直接百度即可。
最终需要的pt文件位于:runs/train/exp/weights下:
模型转换
docker环境搭建及启动、挂载文件参考上一篇博客:https://blog.csdn.net/m0_71523511/article/details/136546588
1、pt模型文件转onnx
①修改export.py文件:
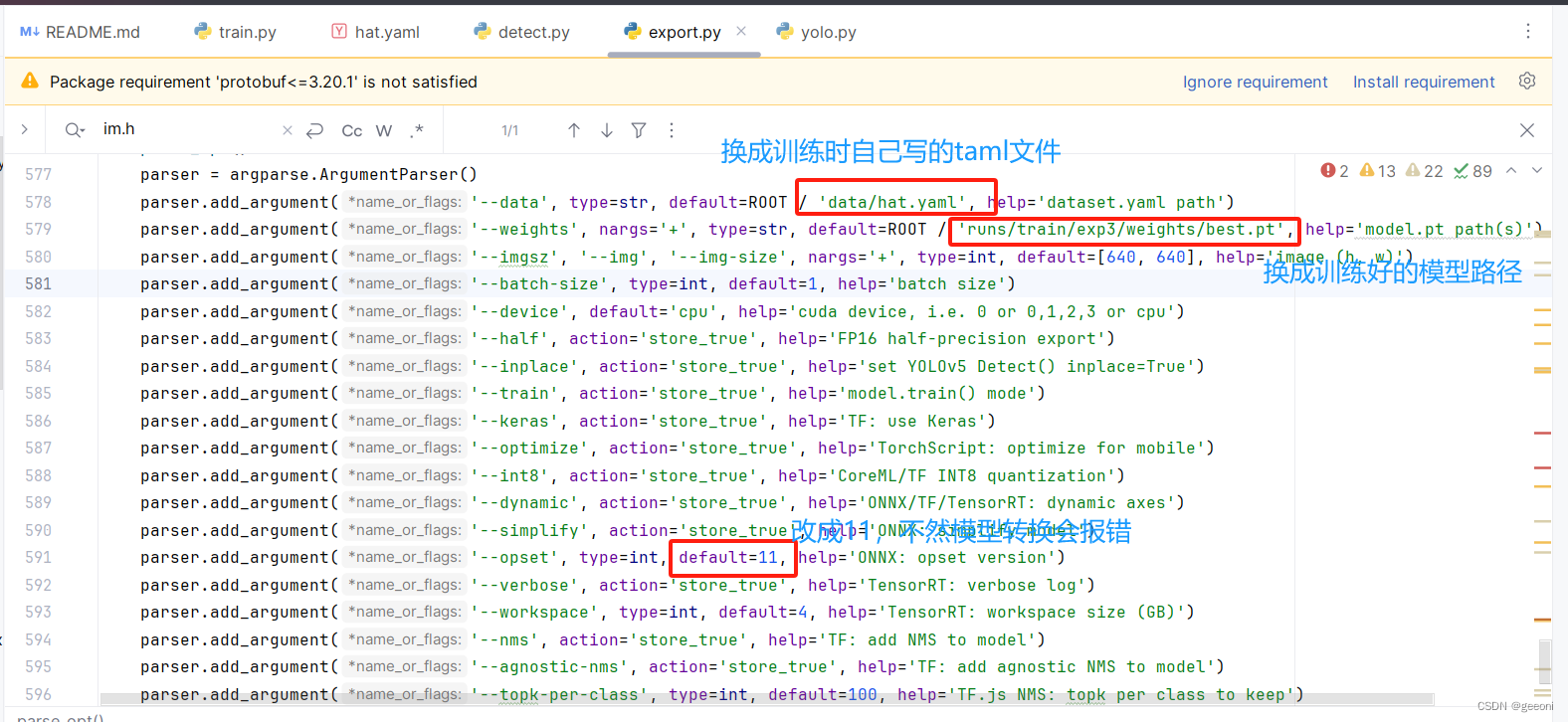
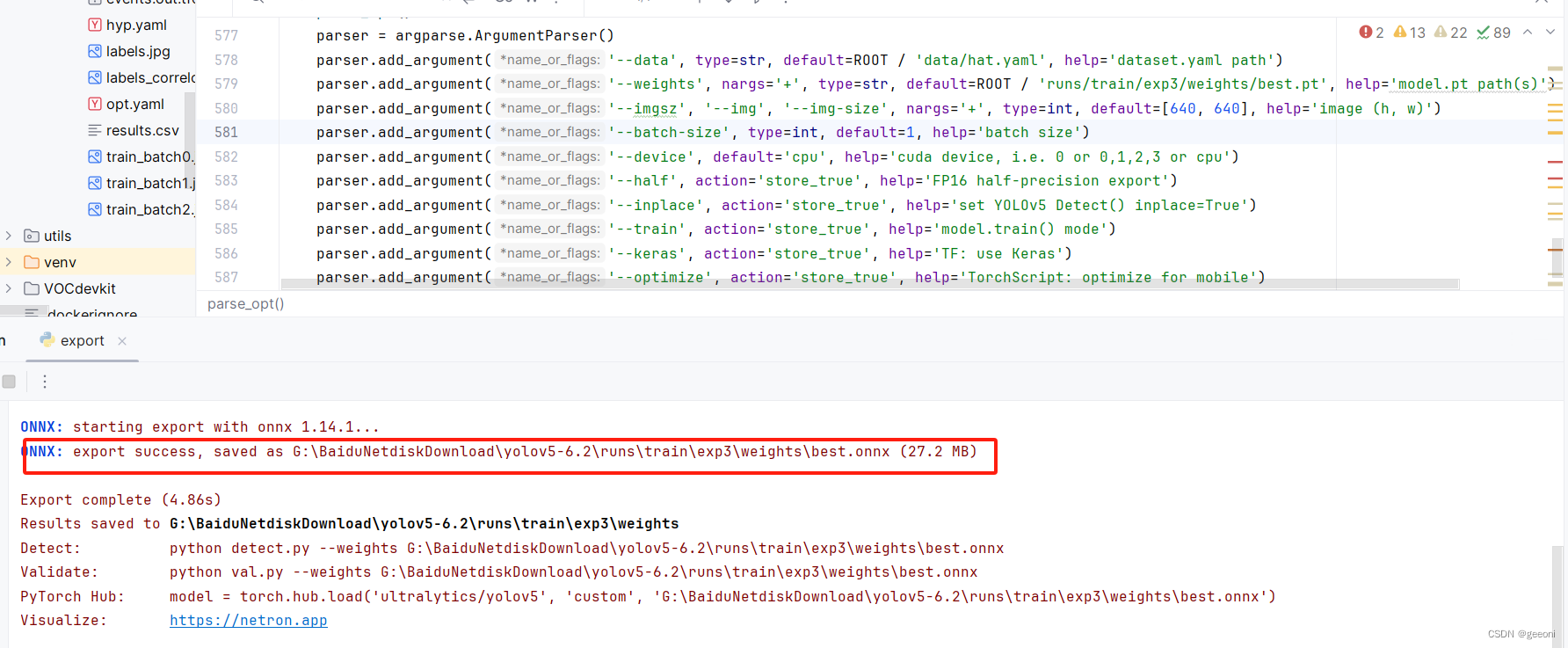
②导出onnx:
运行export.py文件:
2、检查onnx模型
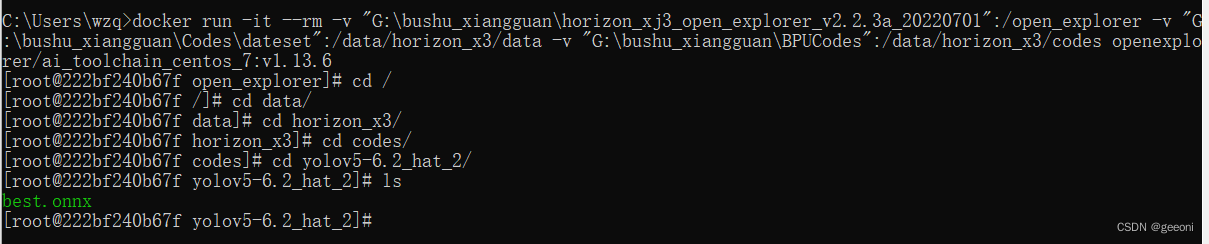
在挂载目录中的BPUCodes文件夹中新建文件夹yolov5-6.2_hat_2,将上一步得到的onnx模型复制一份进来。

打开docker桌面版,按下win+R进行命令符,在命令符中进入docker并将一些文件挂载进去,这里的命令是上一篇一样的:
docker run -it --rm -v "G:\bushu_xiangguan\horizon_xj3_open_explorer_v2.2.3a_20220701":/open_explorer -v "G:\bushu_xiangguan\Codes\dateset":/data/horizon_x3/data -v "G:\bushu_xiangguan\BPUCodes":/data/horizon_x3/codes openexplorer/ai_toolchain_centos_7:v1.13.6
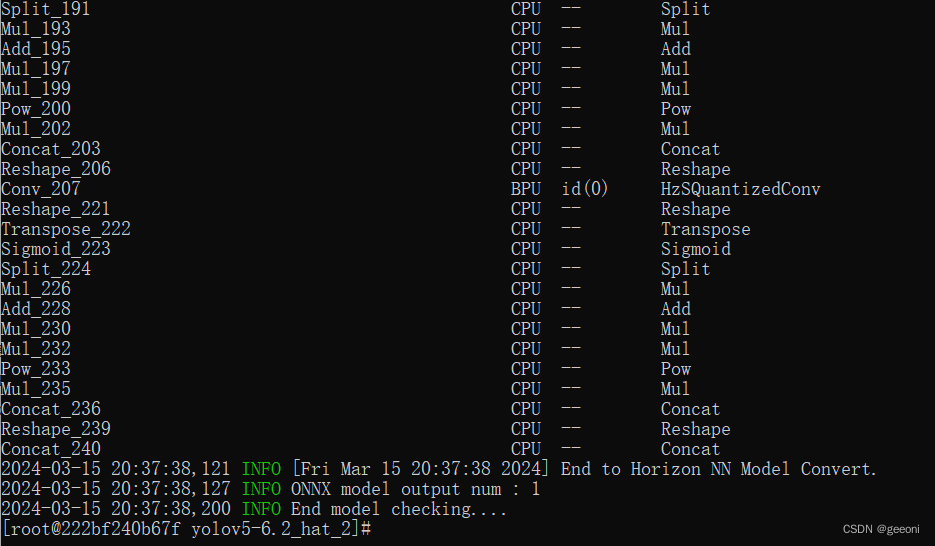
输入以下指令进行检查:
hb_mapper checker --model-type onnx --march bernoulli2 --model best.onnx
3、准备校准数据
在yolov5-6.2_hat_2文件夹下新建prepare_calibration存放待校准数据,新建一个prepare_calibration_data.py文件,执行之后就可以在calibration_data下生成校准数据。
# prepare_calibration_data.py
import os
import cv2
import numpy as npsrc_root = '/data/horizon_x3/codes/yolov5-6.2_hat_2/prepare_calibration' #存放待校准图片的文件夹
cal_img_num = 100
dst_root = '/data/horizon_x3/codes/yolov5-6.2_hat_2/calibration_data' #存放输出校准数据的文件夹num_count = 0
img_names = []
for src_name in sorted(os.listdir(src_root)):if num_count > cal_img_num:breakimg_names.append(src_name)num_count += 1if not os.path.exists(dst_root):os.system('mkdir {0}'.format(dst_root))def imequalresize(img, target_size, pad_value=127.):target_w, target_h = target_sizeimage_h, image_w = img.shape[:2]img_channel = 3 if len(img.shape) > 2 else 1scale = min(target_w * 1.0 / image_w, target_h * 1.0 / image_h)new_h, new_w = int(scale * image_h), int(scale * image_w)resize_image = cv2.resize(img, (new_w, new_h))pad_image = np.full(shape=[target_h, target_w, img_channel], fill_value=pad_value)dw, dh = (target_w - new_w) // 2, (target_h - new_h) // 2pad_image[dh:new_h + dh, dw:new_w + dw, :] = resize_imagereturn pad_imagefor each_imgname in img_names:img_path = os.path.join(src_root, each_imgname)img = cv2.imread(img_path) # BRG, HWCimg = cv2.cvtColor(img, cv2.COLOR_BGR2RGB) # RGB, HWCimg = imequalresize(img, (640, 640)) #训练时是多少就写多少img = np.transpose(img, (2, 0, 1)) # RGB, CHWdst_path = os.path.join(dst_root, each_imgname + '.rgbchw')print("write:%s" % dst_path)img.astype(np.uint8).tofile(dst_path) print('finish')执行python3 prepare_calibration_data.py即可:
此时目录结构如下:
4、onnx转bin
转换模型需要yaml参数文件,具体含义参考https://blog.csdn.net/Zhaoxi_Li/article/details/125516265
在yolov5-6.2_hat_2文件夹下新建model_convert.yaml文件:
model_parameters:onnx_model: './best.onnx' output_model_file_prefix: 'hat_yolov5_6.2' march: 'bernoulli2'
input_parameters:input_type_train: 'rgb'input_layout_train: 'NCHW'input_type_rt: 'nv12'norm_type: 'data_scale'scale_value: 0.003921568627451input_layout_rt: 'NHWC'
calibration_parameters:cal_data_dir: './calibration_data' calibration_type: 'max'max_percentile: 0.9999
compiler_parameters:compile_mode: 'latency'optimize_level: 'O3'debug: Falsecore_num: 2
然后执行:hb_mapper makertbin --config model_convert.yaml --model-type onnx:
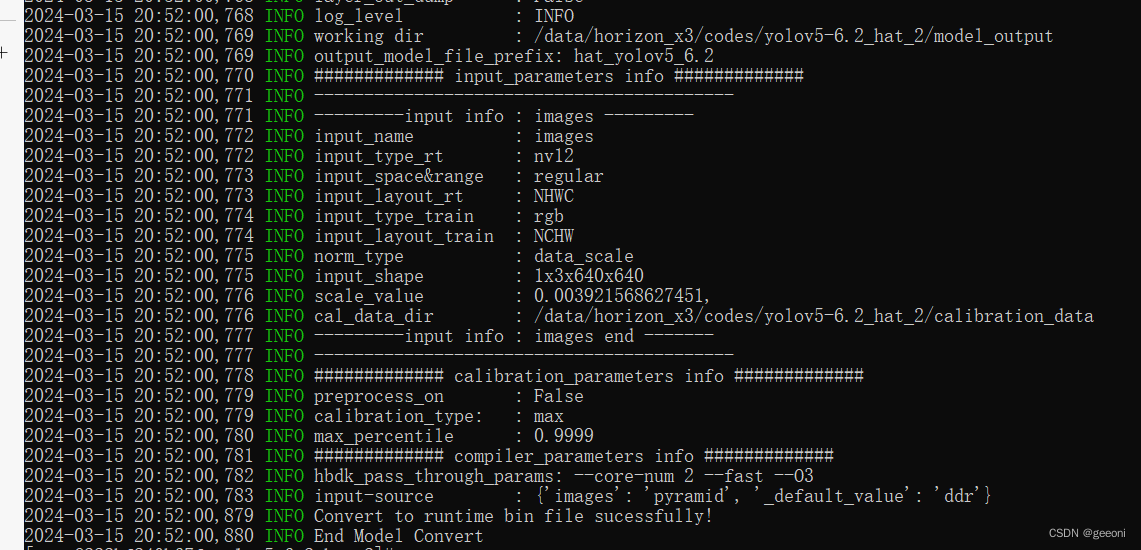
此时自动生成model_output文件夹,里面包含了bin模型:
上板视频流推理
1、图片推理
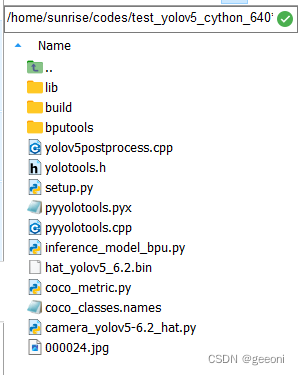
https://developer.horizon.cc/forumDetail/112555549341653639,这篇帖子介绍了cython,将上图有的文件全部拷到板端中,包括前面转成的bin文件。如下进行推理: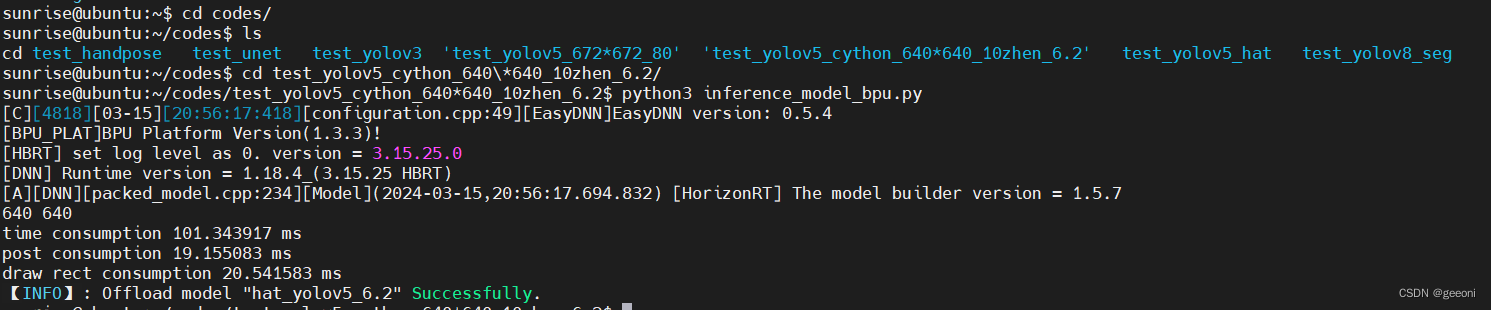
推理结果:

我的这个模型只训练了五轮,对图片的识别率不错,后续的视频流推理容易出错,轮次多点应该就好了。
2、视频流推理
自己新建一个py文件,代码如下:
import numpy as np
import cv2
import os
from hobot_dnn import pyeasy_dnn as dnn
from bputools.format_convert import imequalresize, bgr2nv12_opencvimport lib.pyyolotools as yolotoolsdef get_hw(pro):if pro.layout == "NCHW":return pro.shape[2], pro.shape[3]else:return pro.shape[1], pro.shape[2]def format_yolov5(frame):row, col, _ = frame.shape_max = max(col, row)result = np.zeros((_max, _max, 3), np.uint8)result[0:row, 0:col] = framereturn result# 加载模型和设置参数
model_path = 'hat_yolov5_6.2.bin'
classes_name_path = 'coco_classes.names'
models = dnn.load(model_path)
model_h, model_w = get_hw(models[0].inputs[0].properties)
print("Model Height:", model_h, "Model Width:", model_w)thre_confidence = 0.4
thre_score = 0.25
thre_nms = 0.45
colors = [(255, 255, 0), (0, 255, 0), (0, 255, 255), (255, 0, 0)]# 打开摄像头
cap = cv2.VideoCapture(8) # 使用第一个摄像头(如果有多个摄像头,可能需要更改参数)# 主循环:读取帧,进行目标检测,显示结果
while True:ret, frame = cap.read() # 读取一帧图像if not ret:print("Error: Couldn't capture frame")breakinputImage = format_yolov5(frame)img = imequalresize(inputImage, (model_w, model_h))nv12 = bgr2nv12_opencv(img)t1 = cv2.getTickCount()outputs = models[0].forward(nv12)t2 = cv2.getTickCount()outputs = outputs[0].bufferprint('Inference time: {0} ms'.format((t2 - t1) * 1000 / cv2.getTickFrequency()))image_width, image_height, _ = inputImage.shapefx, fy = image_width / model_w, image_height / model_ht1 = cv2.getTickCount()class_ids, confidences, boxes = yolotools.pypostprocess_yolov5(outputs[0][:, :, 0], fx, fy,thre_confidence, thre_score, thre_nms)t2 = cv2.getTickCount()print('Post-processing time: {0} ms'.format((t2 - t1) * 1000 / cv2.getTickFrequency()))with open(classes_name_path, "r") as f:class_list = [cname.strip() for cname in f.readlines()]for (classid, confidence, box) in zip(class_ids, confidences, boxes):color = colors[int(classid) % len(colors)]cv2.rectangle(frame, box, color, 2)cv2.rectangle(frame, (box[0], box[1] - 20), (box[0] + box[2], box[1]), color, -1)#cv2.putText(frame, str(classid), (box[0], box[1] - 10), cv2.FONT_HERSHEY_SIMPLEX, .5, (0, 0, 0))cv2.putText(frame, class_list[classid], (box[0], box[1] - 10), cv2.FONT_HERSHEY_SIMPLEX, .5, (0,0,0))cv2.imshow('frame', frame) # 显示帧if cv2.waitKey(1) & 0xFF == ord('q'): # 按下 'q' 键退出循环break# 释放资源并关闭窗口
cap.release()
cv2.destroyAllWindows()这个需要通过hdmi将开发板与显示屏连接,才能看到实时画面,大概10帧左右,模型还可以简化,15帧应该很轻松。
最终效果如本文开头所示。