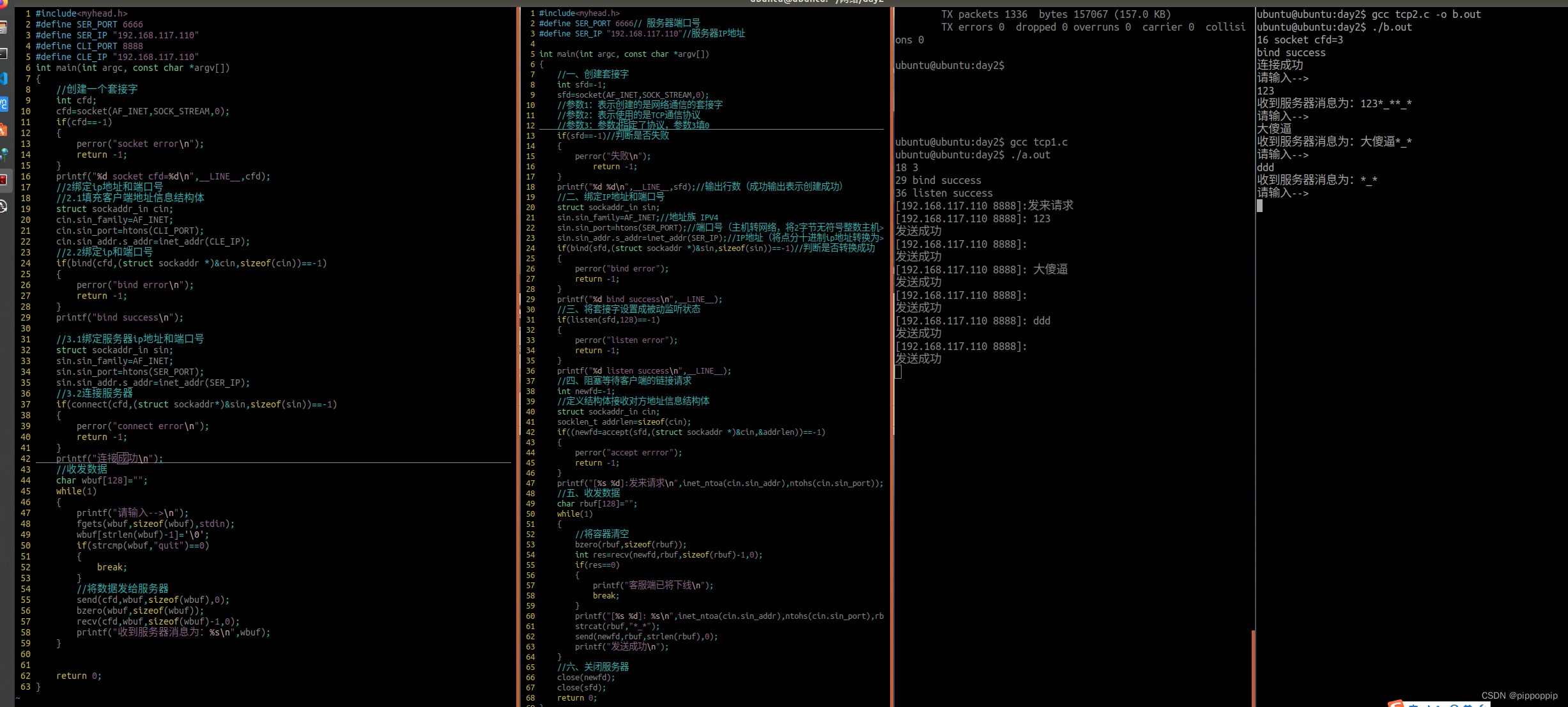
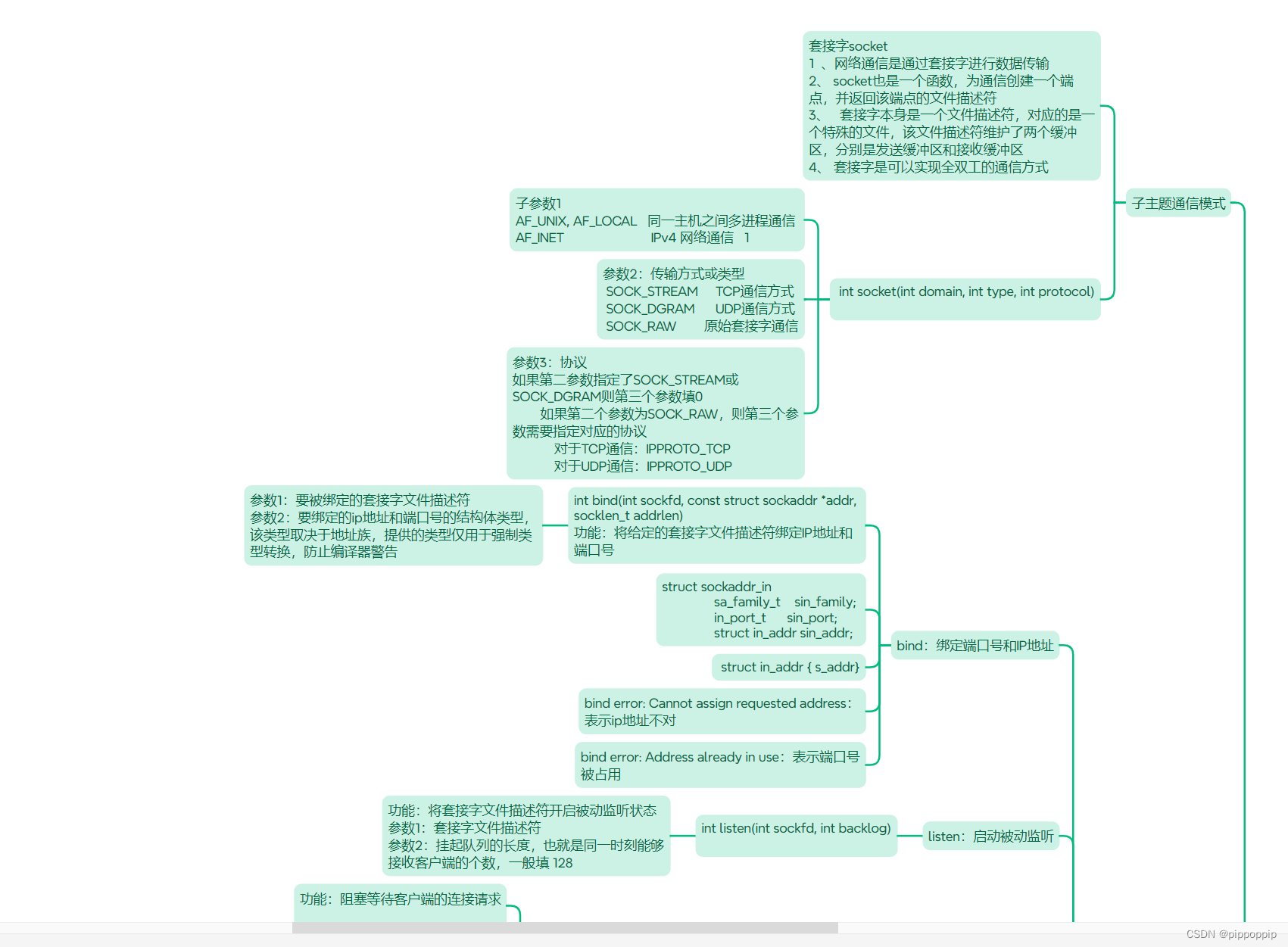
tcp服务器及客户端链接
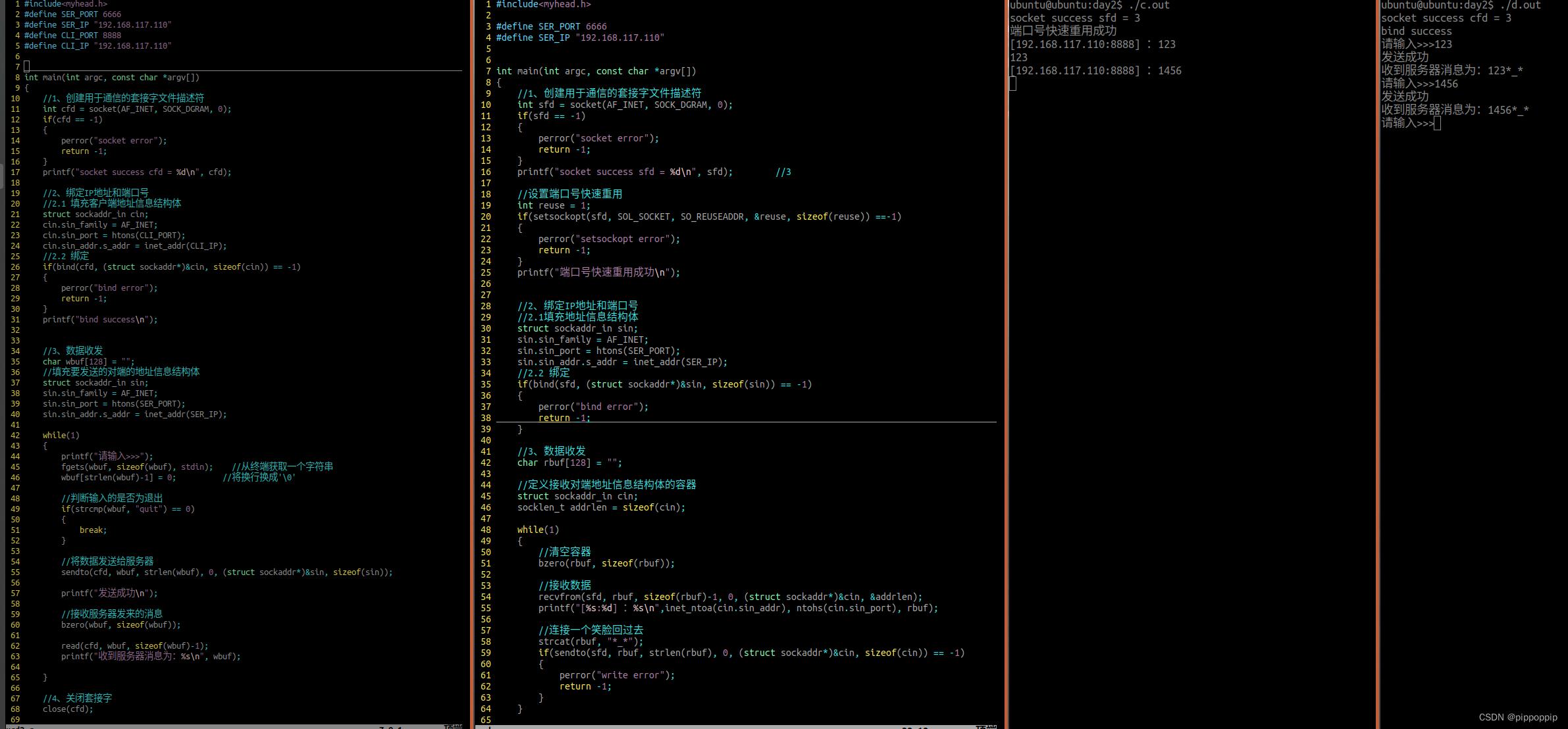
ucd服务器及客户端

机械臂控制
#include<myhead.h>
#define SER_PORT 8888
#define SER_IP "192.168.117.92"
int main(int argc, const char *argv[])
{
//创建套接字
int cfd=socket(AF_INET,SOCK_STREAM,0);
if(cfd==-1)
{
perror("cfd erroe\n");
return -1;
}
printf("%d success cfd=%d\n",__LINE__,cfd);
//连接服务端ip地址及端口
struct sockaddr_in sin;
sin.sin_family=AF_INET;
sin.sin_port=htons(SER_PORT);
sin.sin_addr.s_addr=inet_addr(SER_IP);
if(connect(cfd,(struct sockaddr*)&sin,sizeof(sin))==-1)
{
perror("connect error\n");
return -1;
}
printf("connect success\n");
//收发数据
char red[5]={0xff,0x02,0x00,0x00,0xff};//红色臂容器
unsigned char blue[5]={0xff,0x02,0x01,0x00,0xff};//蓝色臂容器
//将数据发送给服务器以初始化
send(cfd,red,sizeof(red),0);
sleep(1);
send(cfd,blue,sizeof(blue),0);
char key=0;
while(1)
{
scanf("%c",&key);
getchar();
switch(key)
{
case'w':case'W':
{
red[3]+=2;
if(red[3]>=90)
{
red[3]=90;
}
send(cfd,red,sizeof(red),0);
}break;
}
switch(key)
{
case's':case'S':
{
red[3]-=2;
if(red[3]<=-90)
{
red[3]=-90;
}
send(cfd,red,sizeof(red),0);
}break;
}
switch(key)
{
case'A':case'a':
{
blue[3]+=2;
if(red[3]>=90)
{
red[3]=90;
}
send(cfd,blue,sizeof(blue),0);
}break;
}
switch(key)
{
case'd':case'D':
{
blue[3]-=2;
if(red[3]<=0)
{
red[3]=0;
}
send(cfd,blue,sizeof(blue),0);
}break;
}
switch(key)
{
case'q':case'Q':
goto END;
}
}
END:
close(cfd);
return 0;
}