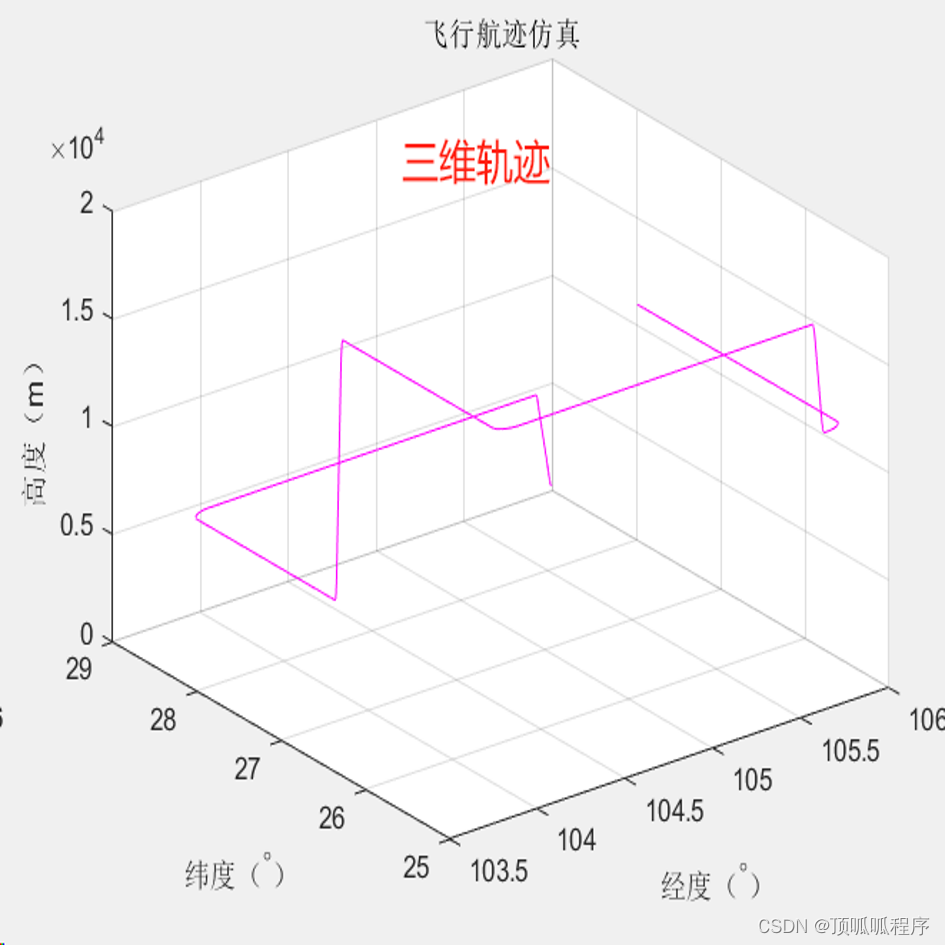
基于matlab的无人机航迹规划(UAV track plannin)。输入输出参数包括 横滚、俯仰、航向角(单位:度);横滚速率、俯仰速率、航向角速率(单位:度/秒);飞机运动速度——X右翼、Y机头、Z天向(单位:米/秒);飞机运动加速度——X右翼、Y机头、Z天向(单位:米/秒/秒);航迹发生器初始位置经度、纬度、高度(单位:度、度、米);飞机运动速度——X东向、Y北向、Z天向(单位:米/秒);经度、纬度、高度(单位:度、度、米) 。程序已调通,可直接运行。
206 无人机航迹规划 横滚、俯仰、航向角 - 小红书 (xiaohongshu.com)