文章目录
- 6. 死锁
- 6.1 死锁
- 原因
- 6.2 避免死锁的方法
- 加锁顺序一致性。
- 超时机制。
- 死锁检测和解除机制。
6. 死锁
6.1 死锁
原因
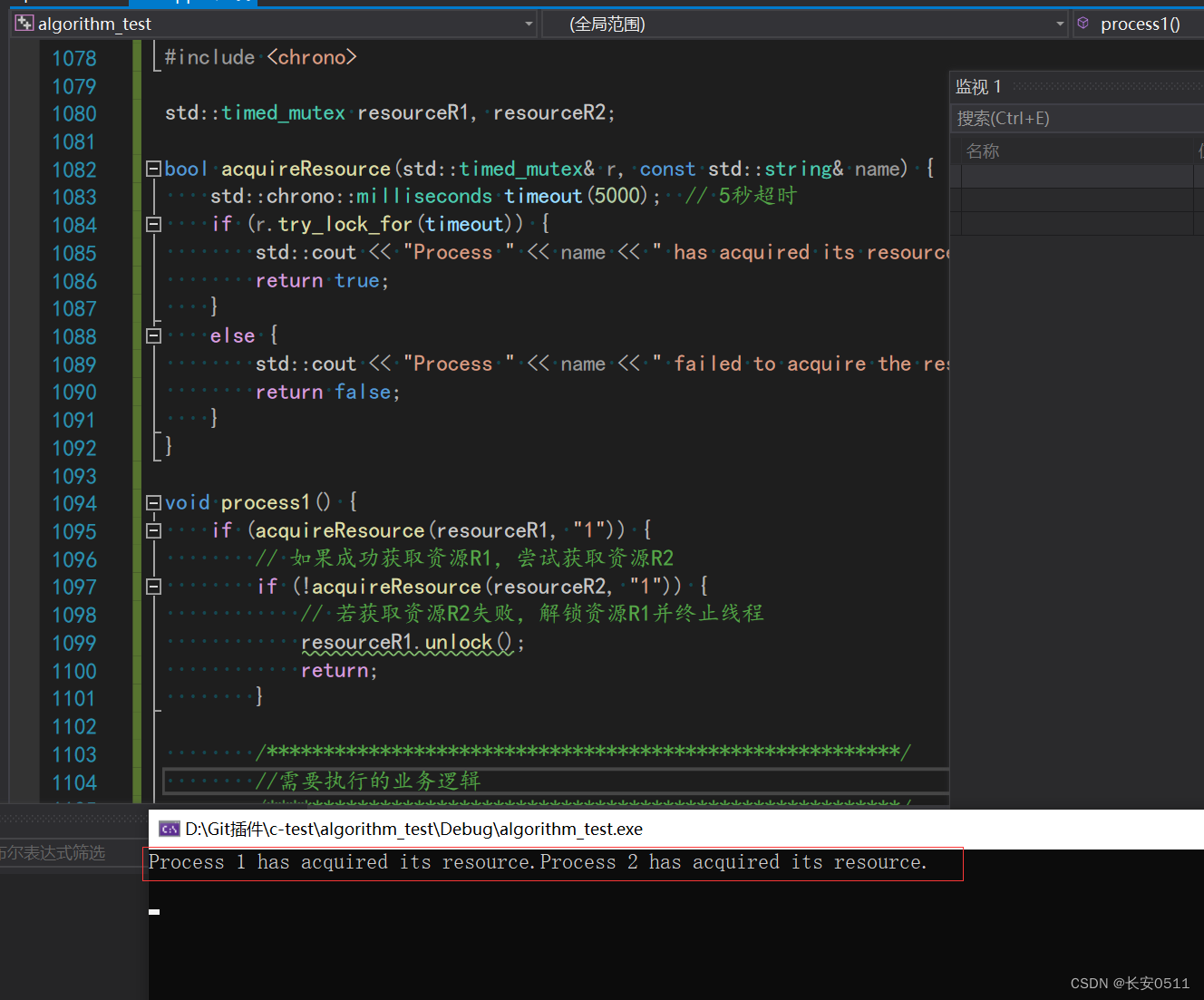
系统资源的竞争:(产生环路)当系统中供多个进程共享的资源数量不足以满足进程的需要时,会引起进程对2资源的竞争而产生死锁。例如,两个进程分别持有资源R1和R2,但进程1申请资源R2,进程2申请资源R1时,两者都会因为所需资源被占用而阻塞。
#include <iostream>
#include <thread>
#include <mutex>
#include <chrono>std::timed_mutex resourceR1, resourceR2;bool acquireResource(std::timed_mutex& r, const std::string& name) {std::chrono::milliseconds timeout(5000); // 5秒超时if (r.try_lock_for(timeout)) {std::cout << "Process " << name << " has acquired its resource." << std::endl;return true;}else {std::cout << "Process " << name << " failed to acquire the resource within 5 seconds. Terminating..." << std::endl;return false;}
}void process1() {if (acquireResource(resourceR1, "1")) {// 如果成功获取资源R1,尝试获取资源R2if (!acquireResource(resourceR2, "1")) {// 若获取资源R2失败,解锁资源R1并终止线程resourceR1.unlock();return;}/********************************************************///需要执行的业务逻辑(不会被执行)/********************************************************/resourceR1.unlock();resourceR2.unlock();}
}void process2() {if (acquireResource(resourceR2, "2")) {if (!acquireResource(resourceR1, "2")) {resourceR2.unlock();return;}// 同样,此处的业务逻辑也不会被执行resourceR1.unlock();resourceR2.unlock();}
}int main() {std::thread t1(process1);std::thread t2(process2);t1.join();t2.join();return 0;
}

逻辑错误:程序逻辑错误可能导致死锁,如死循环或无限等待的情况。例如,在数据交换中,如果一方发送的消息丢失,发送方会等待接收返回信息,而接收方会无限等待接收信息,导致死锁。
#include <iostream>
#include <thread>
#include <mutex>
#include <condition_variable>
#include <chrono>std::mutex mtx;
std::condition_variable cv1, cv2;
bool messageReceived = false;
bool acknowledgmentSent = false;// 发送线程
void senderThread() {std::cout << "Sender: Sending data...\n";// 假设发送数据(此处省略具体发送逻辑)std::unique_lock<std::mutex> lk(mtx);auto timeout = std::chrono::system_clock::now() + std::chrono::seconds(5);while (!acknowledgmentSent && std::cv_status::timeout == cv1.wait_until(lk, timeout)) {if (std::chrono::system_clock::now() >= timeout) {std::cout << "Sender: Timeout occurred, assuming no acknowledgement received and exiting.\n";break; // 超时后退出循环,不再等待确认}}lk.unlock();
}// 接收线程
void receiverThread() {std::this_thread::sleep_for(std::chrono::seconds(2)); // 假设在此期间消息丢失std::unique_lock<std::mutex> lk(mtx);std::cout << "Receiver: Received data...\n";messageReceived = true;cv2.notify_one(); // 假设这是接收方发送确认的方式// 接收方也会等待发送方确认收到确认信息(这是一个逻辑错误,实际应用中通常不需要)auto timeout = std::chrono::system_clock::now() + std::chrono::seconds(5);while (!messageReceived && std::cv_status::timeout == cv2.wait_until(lk, timeout)) {if (std::chrono::system_clock::now() >= timeout) {std::cout << "Receiver: Timeout occurred, assuming message not delivered and exiting.\n";break; // 超时后退出循环,不再等待消息}}lk.unlock();
}int main() {std::thread t1(senderThread);std::thread t2(receiverThread);t1.join();t2.join();return 0;
}
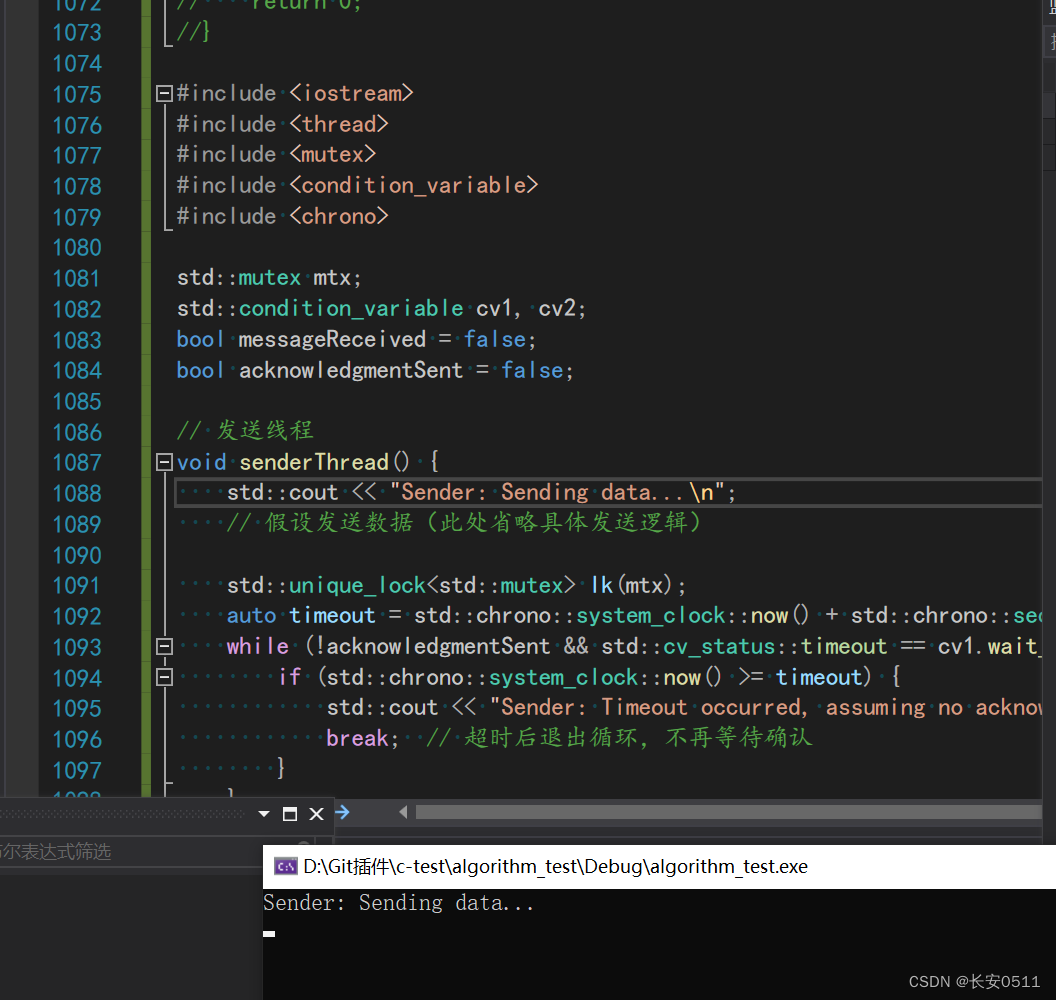
两秒后

五秒后

不恰当的同步:在并发编程中,不恰当的同步机制可能导致死锁。例如,多个线程在等待其他线程释放锁时,如果这些线程彼此都持有对方需要的锁,就会导致死锁。
#include <iostream>
#include <thread>
#include <mutex>
#include <chrono>std::timed_mutex mtx1, mtx2;void threadFunction1() {if (mtx1.try_lock_for(std::chrono::seconds(5))) {std::cout << "Thread 1: Acquired mtx1\n";// 尝试获取mtx2,如果5秒内未获取成功,则释放mtx1以防止死锁if (!mtx2.try_lock_for(std::chrono::seconds(5))) {mtx1.unlock();std::cout << "Thread 1: Could not acquire mtx2 within 5 seconds, releasing mtx1 to prevent deadlock.\n";return;}std::cout << "Thread 1: Acquired mtx2\n";mtx2.unlock();mtx1.unlock();}else {std::cout << "Thread 1: Could not acquire mtx1 within 5 seconds.\n";}
}void threadFunction2() {if (mtx2.try_lock_for(std::chrono::seconds(5))) {std::cout << "Thread 2: Acquired mtx2\n";if (!mtx1.try_lock_for(std::chrono::seconds(5))) {mtx2.unlock();std::cout << "Thread 2: Could not acquire mtx1 within 5 seconds, releasing mtx2 to prevent deadlock.\n";return;}std::cout << "Thread 2: Acquired mtx1\n";mtx1.unlock();mtx2.unlock();}else {std::cout << "Thread 2: Could not acquire mtx2 within 5 seconds.\n";}
}int main() {std::thread t1(threadFunction1);std::thread t2(threadFunction2);t1.join();t2.join();return 0;
}

6.2 避免死锁的方法
加锁顺序一致性。
#include <iostream>
#include <thread>
#include <mutex>std::mutex mtx1, mtx2;// 定义一个固定的全局锁顺序
const bool lockOrder[] = {true, false}; // 先锁mtx1,后锁mtx2void worker(int id) {if (lockOrder[0]) {mtx1.lock();std::cout << "Thread " << id << ": Acquired mtx1\n";// 在拥有mtx1的情况下尝试获取mtx2mtx2.lock();std::cout << "Thread " << id << ": Acquired mtx2\n";} else {// 如果定义的顺序是先锁mtx2mtx2.lock();std::cout << "Thread " << id << ": Acquired mtx2\n";// 在拥有mtx2的情况下尝试获取mtx1mtx1.lock();std::cout << "Thread " << id << ": Acquired mtx1\n";}// 重要:解锁按照相反的顺序进行mtx2.unlock();mtx1.unlock();// 业务逻辑...
}int main() {std::thread t1(worker, 1);std::thread t2(worker, 2);t1.join();t2.join();return 0;
}
在上述示例中,我们预定义了一个全局的锁获取顺序数组lockOrder,确保所有线程按照同样的顺序(本例中是先获取mtx1再获取mtx2)来获取互斥锁。这样可以防止如下情况:一个线程持有mtx1并等待mtx2,而另一个线程持有mtx2并等待mtx1,从而形成死锁。
请注意,为了避免死锁,不仅在获取锁时需遵循一致的顺序,而且在解锁时也应按照相反的顺序进行。在上面的代码中,无论哪种顺序,我们都是先解锁mtx2,然后再解锁mtx1。这样可以确保在任何时候,已经持有两个锁的线程都能顺利地按顺序释放它们,避免死锁的发生。
超时机制。
以下是一个使用std::timed_mutex的示例,当尝试获取互斥锁时设置一个超时时间,如果在规定时间内没能获取到锁,则线程放弃获取,从而可以避免死锁的发生:
#include <iostream>
#include <thread>
#include <mutex>
#include <chrono>std::timed_mutex mtx1, mtx2;void worker(int id) {if (id == 1) {// 线程1尝试获取mtx1if (mtx1.try_lock_for(std::chrono::seconds(5))) {std::cout << "Thread " << id << ": Acquired mtx1\n";// 在持有mtx1的前提下尝试获取mtx2,超时时间为5秒if (mtx2.try_lock_for(std::chrono::seconds(5))) {std::cout << "Thread " << id << ": Acquired mtx2\n";mtx2.unlock();} else {std::cout << "Thread " << id << ": Could not acquire mtx2 within 5 seconds, releasing mtx1.\n";}mtx1.unlock();} else {std::cout << "Thread " << id << ": Could not acquire mtx1 within 5 seconds.\n";}} else if (id == 2) {// 线程2尝试获取mtx2,同样设置5秒超时if (mtx2.try_lock_for(std::chrono::seconds(5))) {std::cout << "Thread " << id << ": Acquired mtx2\n";// 在持有mtx2的前提下尝试获取mtx1,同样设置5秒超时if (mtx1.try_lock_for(std::chrono::seconds(5))) {std::cout << "Thread " << id << ": Acquired mtx1\n";mtx1.unlock();} else {std::cout << "Thread " << id << ": Could not acquire mtx1 within 5 seconds, releasing mtx2.\n";}mtx2.unlock();} else {std::cout << "Thread " << id << ": Could not acquire mtx2 within 5 seconds.\n";}}
}int main() {std::thread t1(worker, 1);std::thread t2(worker, 2);t1.join();t2.join();return 0;
}
在这个示例中,两个线程都试图按顺序获取互斥锁,但是如果在5秒钟内无法获取所需的下一个锁,它们都会释放已经持有的锁并退出相应的操作,从而避免了死锁的发生。
死锁检测和解除机制。
在C++标准库中并没有内置的死锁检测和解除机制,但我们可以通过设计良好的程序逻辑和利用特定的同步原语(如条件变量、互斥量等)来实施自己的死锁检测和解除策略。
// 假设有以下结构表示资源和进程的状态
struct Process {int pid; // 进程IDstd::vector<int> holdingResources; // 当前持有的资源ID集合std::vector<int> requestingResources; // 正在请求的资源ID集合
};struct Resource {int rid; // 资源IDint available; // 当前可用的数量std::map<int, int> allocated; // 已分配给各个进程的资源数量
};// 假设有个全局的数据结构存储所有进程和资源的状态
std::vector<Process> processes;
std::vector<Resource> resources;// 自定义的死锁检测函数(伪代码)
bool detectAndResolveDeadlocks() {// 初始化资源分配图(Resource Allocation Graph, RAG)// ...// 检查是否有循环等待for (auto& p : processes) {// 使用拓扑排序或其他方法检查是否存在环路if (isCycleDetectedInRAG(p)) {// 死锁检测出环,现在需要解除死锁resolveDeadlock(p.pid);return true;}}return false; // 没有发现死锁
}// 解除死锁的策略有很多种,以下是一个简化的版本(仅作示例)
void resolveDeadlock(int pid) {// 可以选择一个进程撤销其部分请求或者抢占它的资源// 例如,选择持有最多资源但请求未满足最多的进程,释放其最少的一个资源Process& victim = getVictimProcess(pid);int resourceToRelease = getResourceToRelease(victim);// 释放资源并重新开始检测releaseResource(victim, resourceToRelease);victim.requestingResources.erase(std::find(victim.requestingResources.begin(), victim.requestingResources.end(), resourceToRelease));
}// ... 其他辅助函数(getVictimProcess, getResourceToRelease, releaseResource等)
在实践中,死锁检测和解除往往涉及到复杂的算法和策略,比如银行家算法等。在C++程序中实现这样的功能通常需要自定义数据结构和算法,并且考虑到并发环境下的安全性,还需要适当使用锁来保护共享数据。
由于C++标准库提供的互斥量和条件变量等工具不具备自动死锁检测和解除功能,开发者需要自行设计和实现适合项目需求的死锁预防、检测及解除方案。在某些高级并发库中,可能提供了更高级别的抽象帮助处理这类问题,但C++标准库本身不直接提供这样的机制。