目录
- 前言
- 一、Unity中AI Navigation是什么?
- 二、使用步骤
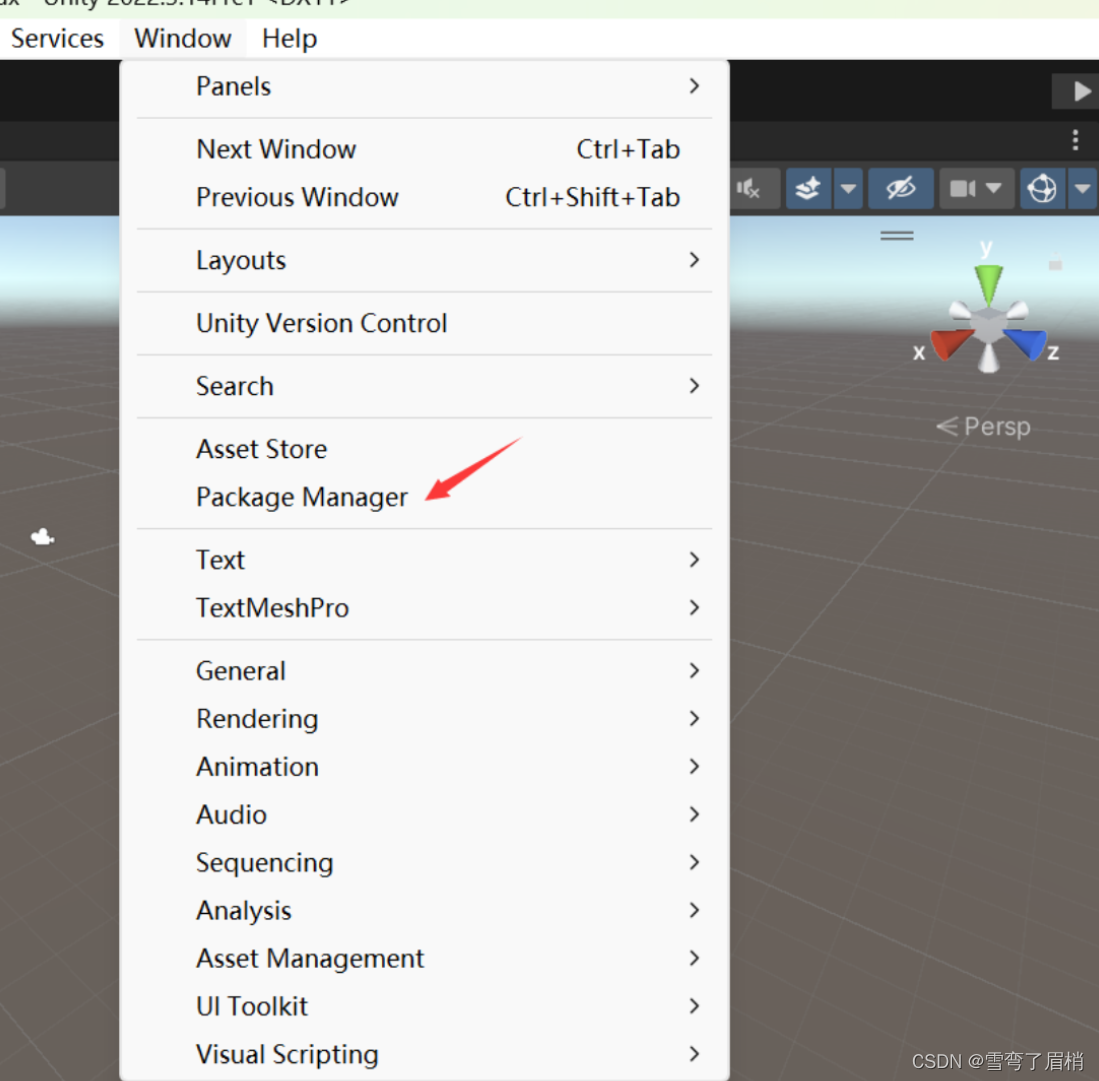
- 1.安装AI Navigation
- 2.创建模型和材质
- 3.编写向目标移动的脚本
- 4.NavMeshLink桥接组件
- 5.NavMeshObstacle组件
- 6.NavMeshModifler组件
- 三、效果
- 总结
前言
Unity是一款强大的游戏开发引擎,而人工智能(AI)导航是游戏中至关重要的一部分。通过Unity的AI Navigation系统,开发者可以轻松地为游戏中的角色实现自动导航功能。本文将介绍Unity中AI Navigation的基础内容,帮助开发者快速入门。
一、Unity中AI Navigation是什么?
Unity中的AI Navigation是一套用于游戏开发的导航系统,它使开发者能够为游戏中的角色提供智能的路径规划和导航功能。通过AI Navigation系统,游戏中的角色可以根据场景中的障碍物、地形等信息,自动计算出最佳路径,并沿着路径移动到目标位置。
二、使用步骤
1.安装AI Navigation
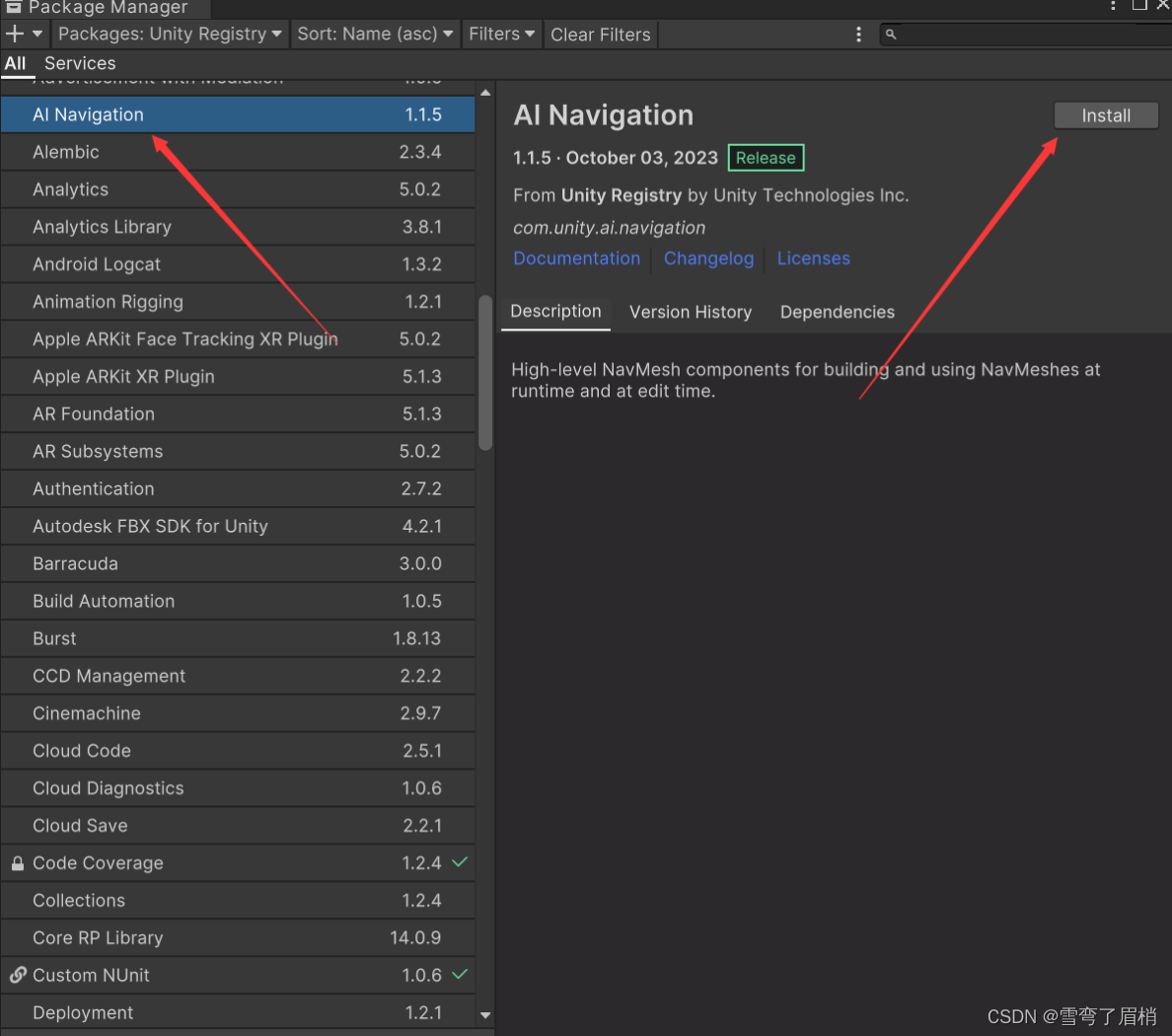
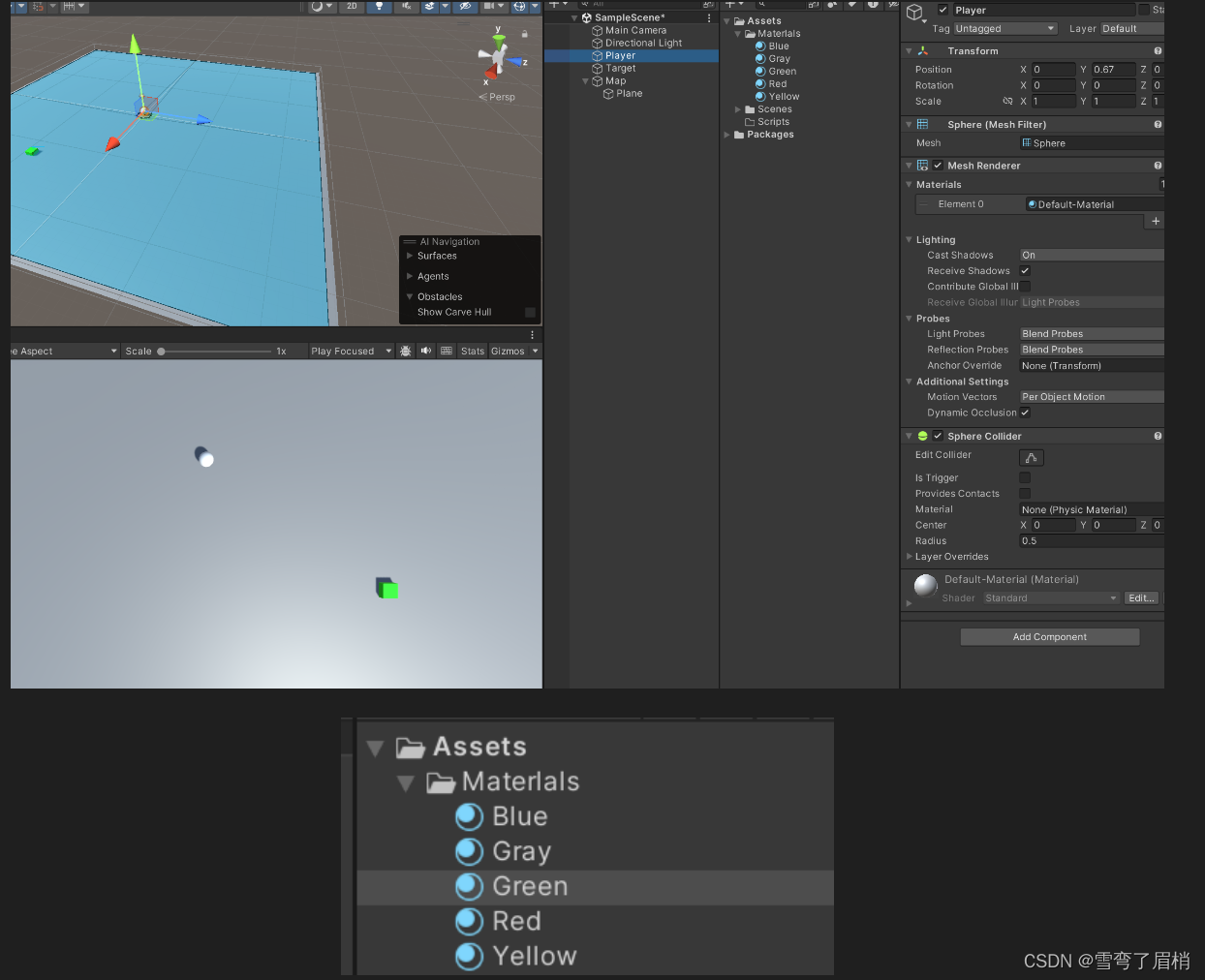
2.创建模型和材质
创建地面和材质
创建一个空物体,把Plane放到里面,然后挂载NavMeshSurface组件获取当前地图数据
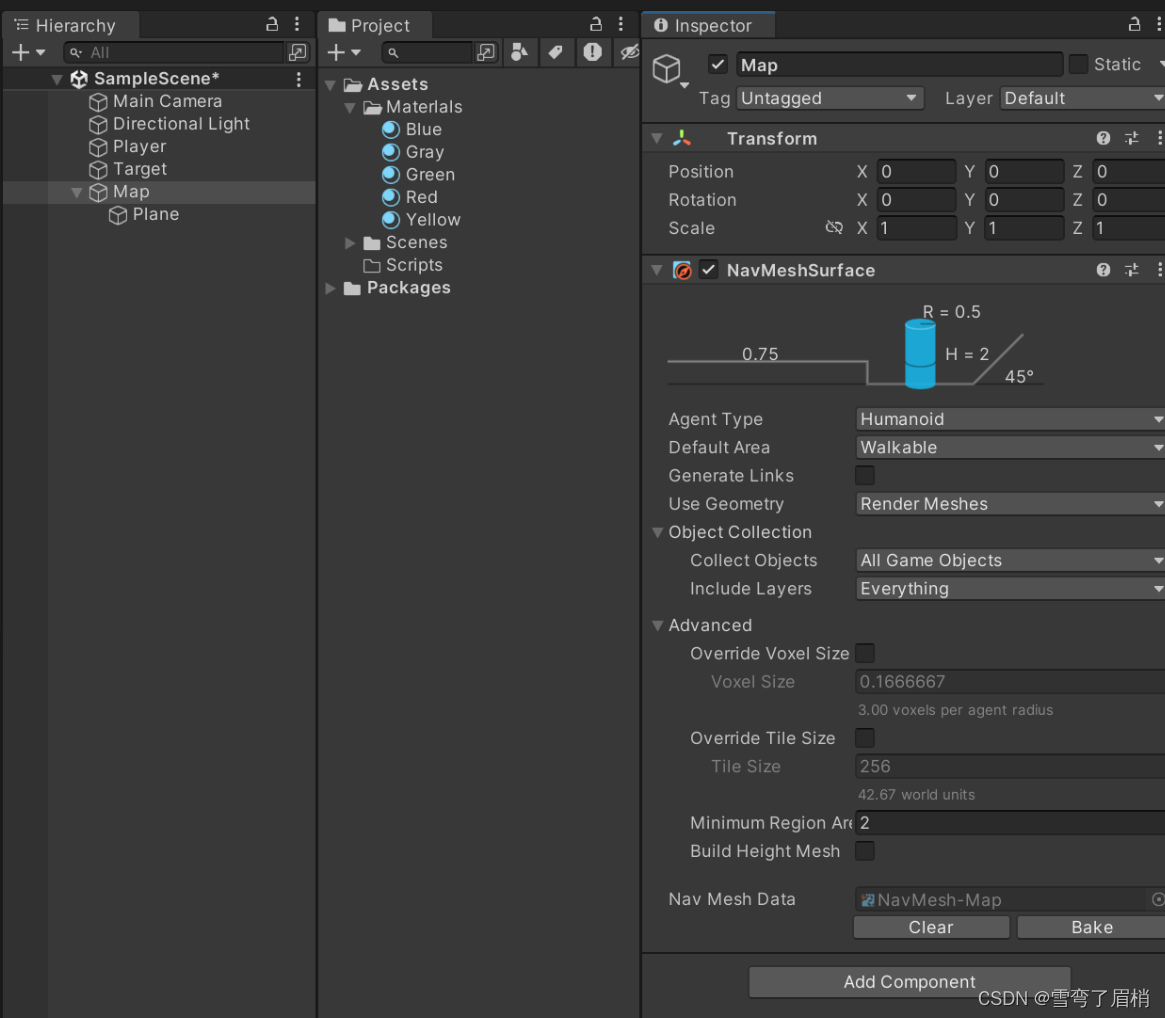
NavMeshSurface 是 Unity 中用于生成导航网格的组件。它表示特定 NavMesh Agent 类型的可行走区域,并定义了场景中应该构建 NavMesh 的部分。
以下是 NavMeshSurface 组件的一些属性介绍:
- Agent Type:指定使用该
NavMeshSurface的NavMesh Agent类型。这对于烘焙设置和在寻路期间将NavMesh Agent匹配到适当的表面非常有用。 - Default Area:定义在构建
NavMesh时生成的区域类型。 - Generate Links:如果启用此选项,由
NavMeshSurface收集的对象将在烘焙过程中被视为生成链接。有关更多信息,请参阅链接生成部分。 - Use Geometry:选择用于烘焙的几何体。
- Object Collection:定义用于烘焙的 GameObject 集合。
- Advanced Settings:高级设置部分允许您自定义以下附加参数。
- NavMeshData(只读):定位存储 NavMesh 的资产文件。
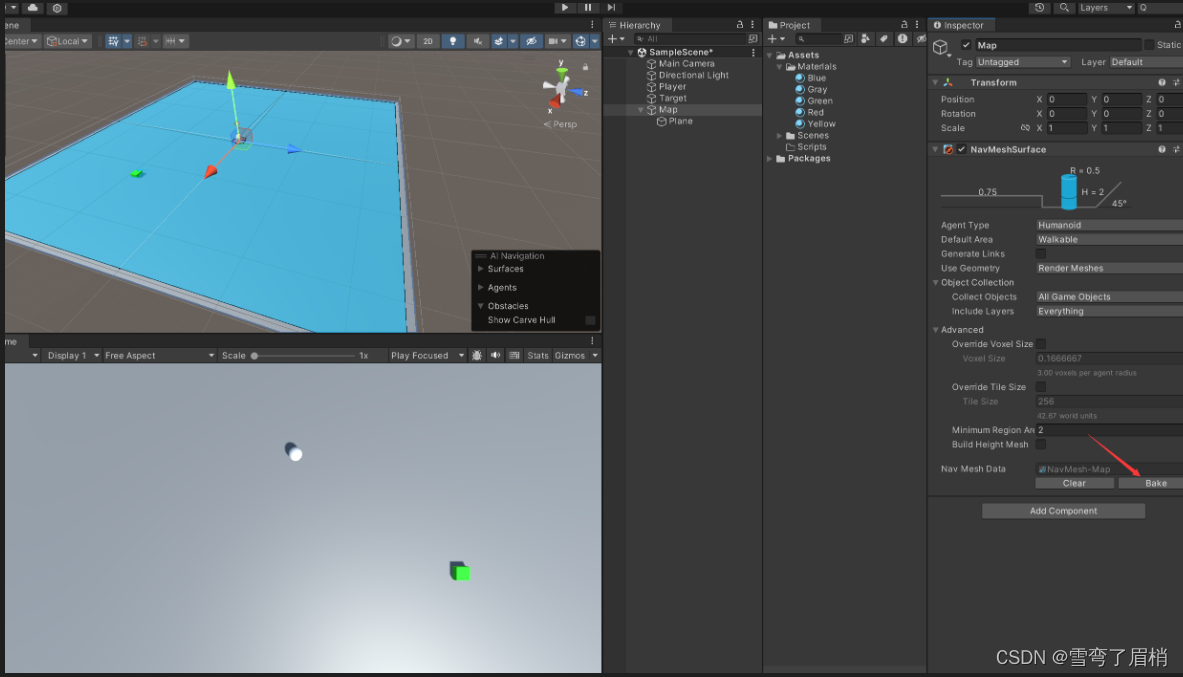
点击bake开始烘焙地形
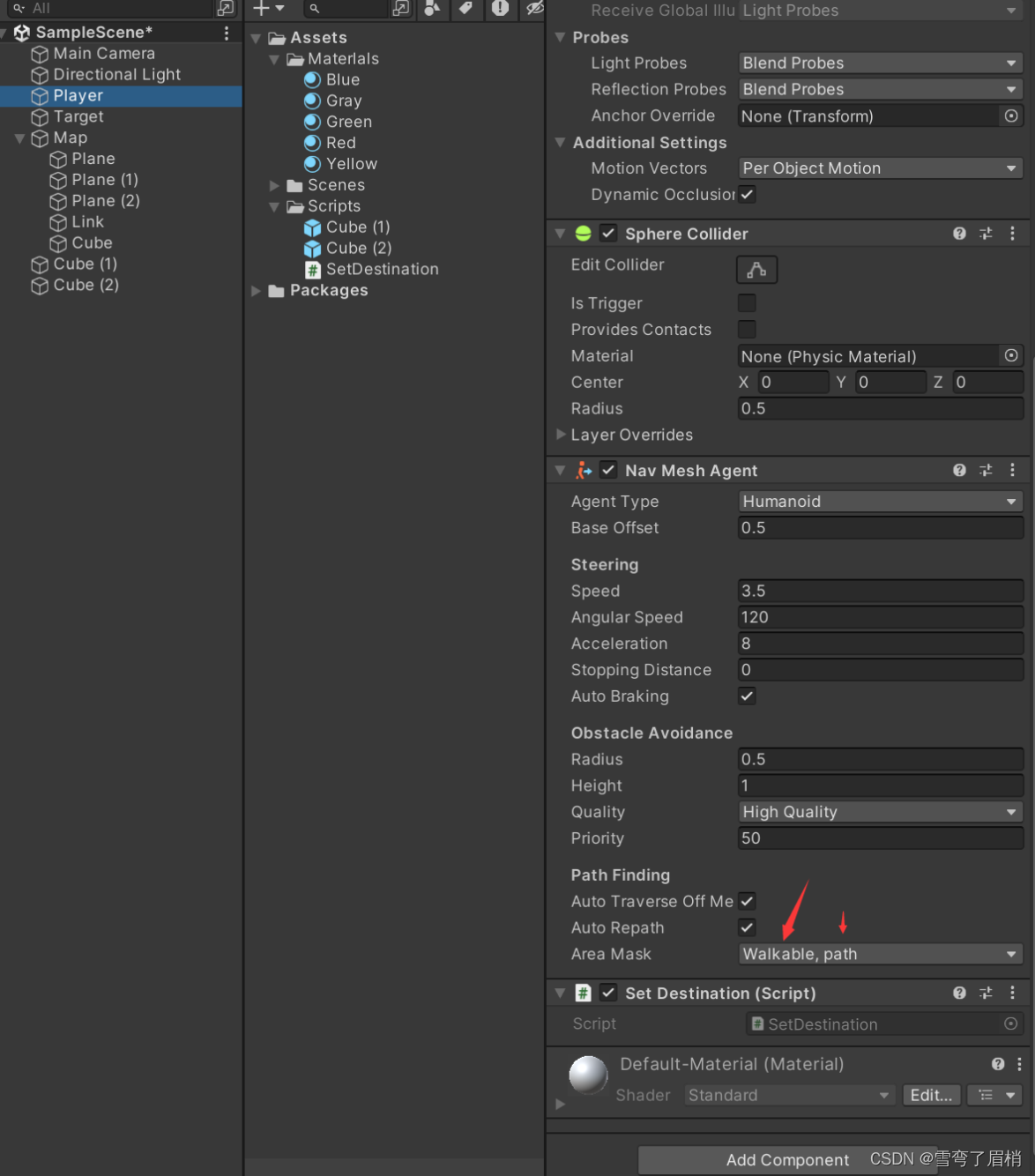
给Player挂上Nav Mesh Agent组件
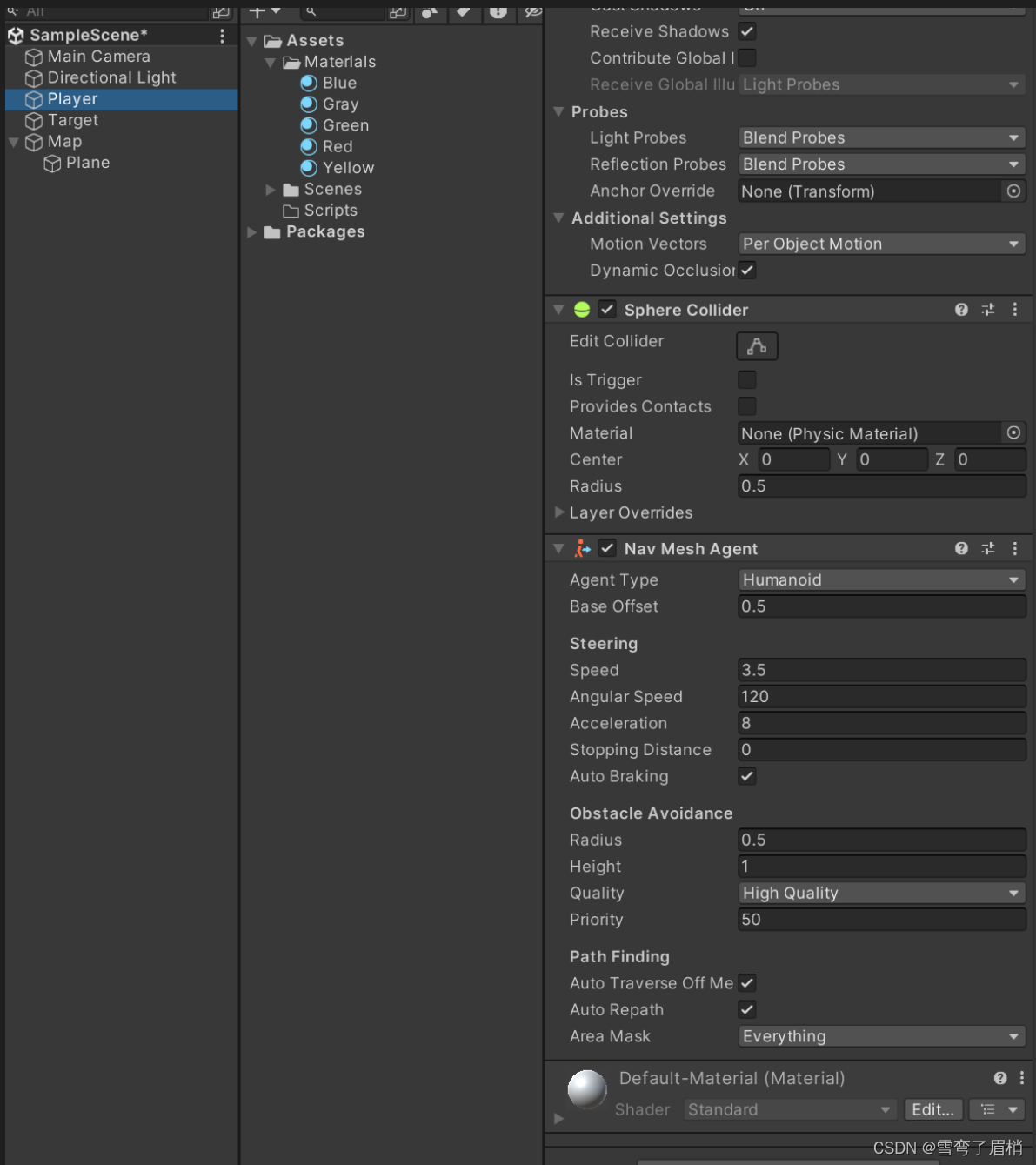
NavMeshAgent 是 Unity 中用于导航的组件,用于控制角色在场景中的移动。
以下是 NavMeshAgent 组件的一些属性介绍:
-
AgentType:代理的类型 。
-
BaseOffset:相对垂直位移偏差。
-
Speed:遵循路径时的最大移动速度。
-
AngularSpeed:遵循路径时的最大转向速度(以度/秒为单位)。
-
Acceleration:代理在遵循路径时的最大加速度,以单位/秒2为单位。
-
StoppingDistance:距离目标位置停止的距离。
-
AutoBraking:代理是否自动刹车以避免超过目标点
-
Radius:代理的避让半径。
-
Height:代理的高度,用于通过障碍物等。
-
Priority :用于设置避让优先级。
-
AreaMask:指定哪些 NavMesh 区域可通行。
3.编写向目标移动的脚本
代码如下(示例):
using System.Collections;
using System.Collections.Generic;
using UnityEngine;
using UnityEngine.AI;public class SetDestination : MonoBehaviour
{private NavMeshAgent _agent;private Transform _target;// Start is called before the first frame updatevoid Start(){_agent = GetComponent<NavMeshAgent>();_target = GameObject.Find("Target").transform;}// Update is called once per framevoid Update(){_agent.SetDestination(_target.position);}
}然后把脚本挂载Player上
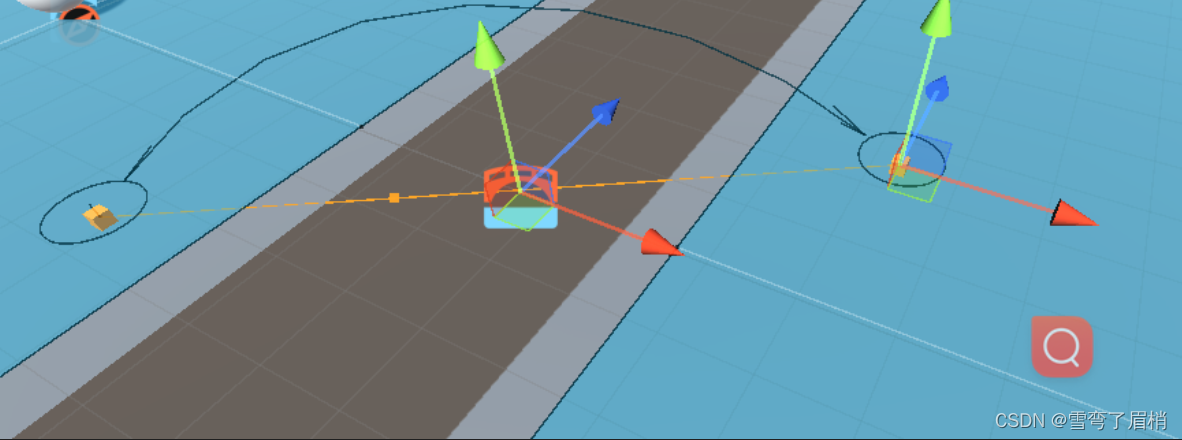
4.NavMeshLink桥接组件
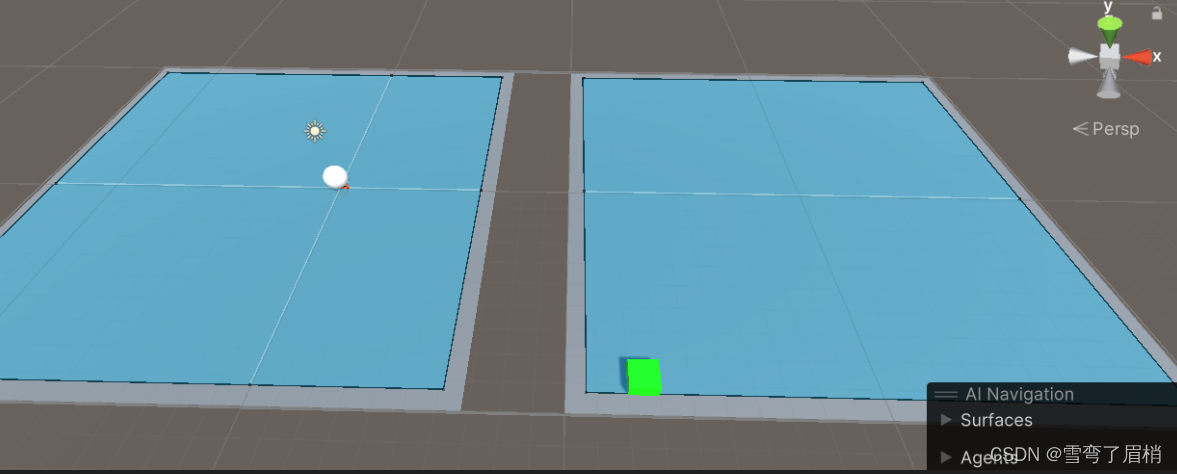
创建2个不贴合的平面,然后烘焙导航网格
创建一个空物体并添加NavMeshLink组件
NavMeshLink 是 Unity 中用于导航的组件,用于创建可导航的链接,连接使用 NavMesh 的不同位置。这些链接可以是从点到点,也可以跨越空隙,此时代理会使用入口边缘上最近的位置来穿越链接。您必须使用 NavMeshLink 来连接不同的 NavMesh Surface。
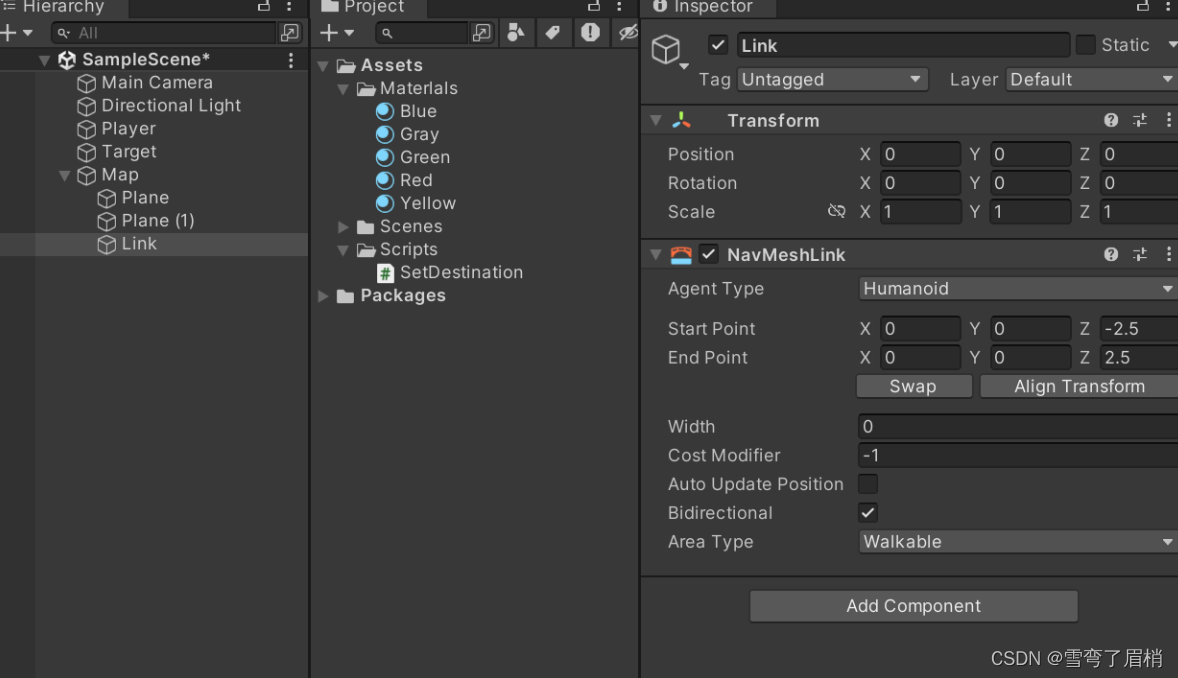
-
Start Point:链接的起始点,相对于 GameObject。使用 XYZ 坐标定义。
-
End Point:链接的结束点,相对于 GameObject。使用 XYZ 坐标定义。
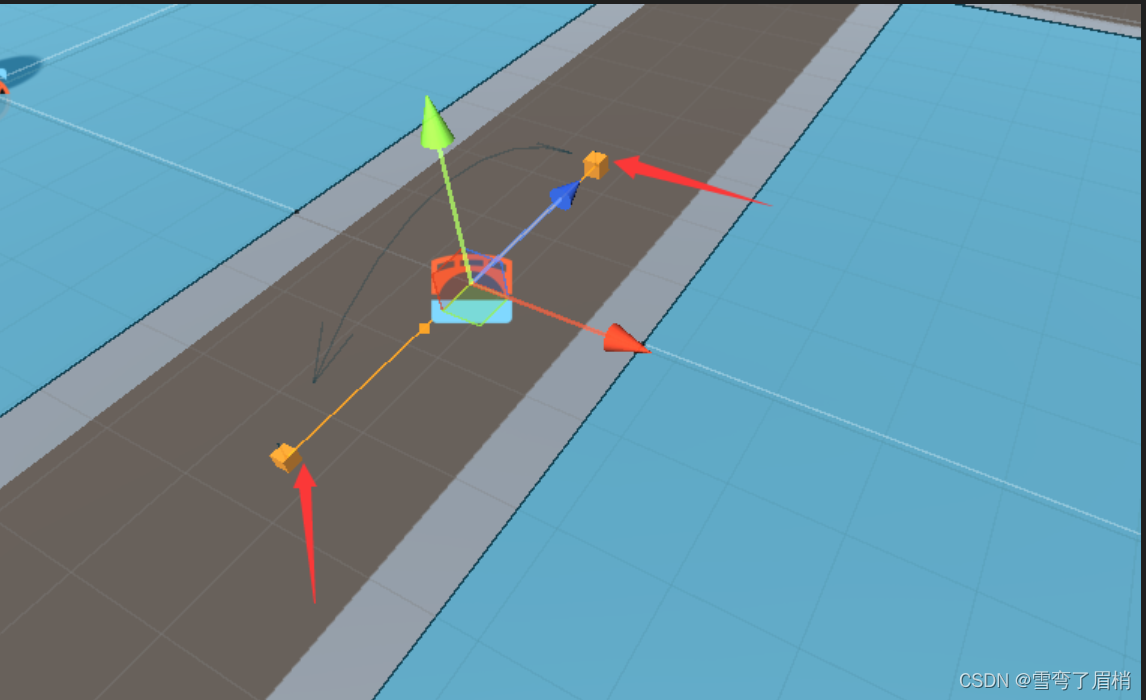
选中图中的小方块,然后移动

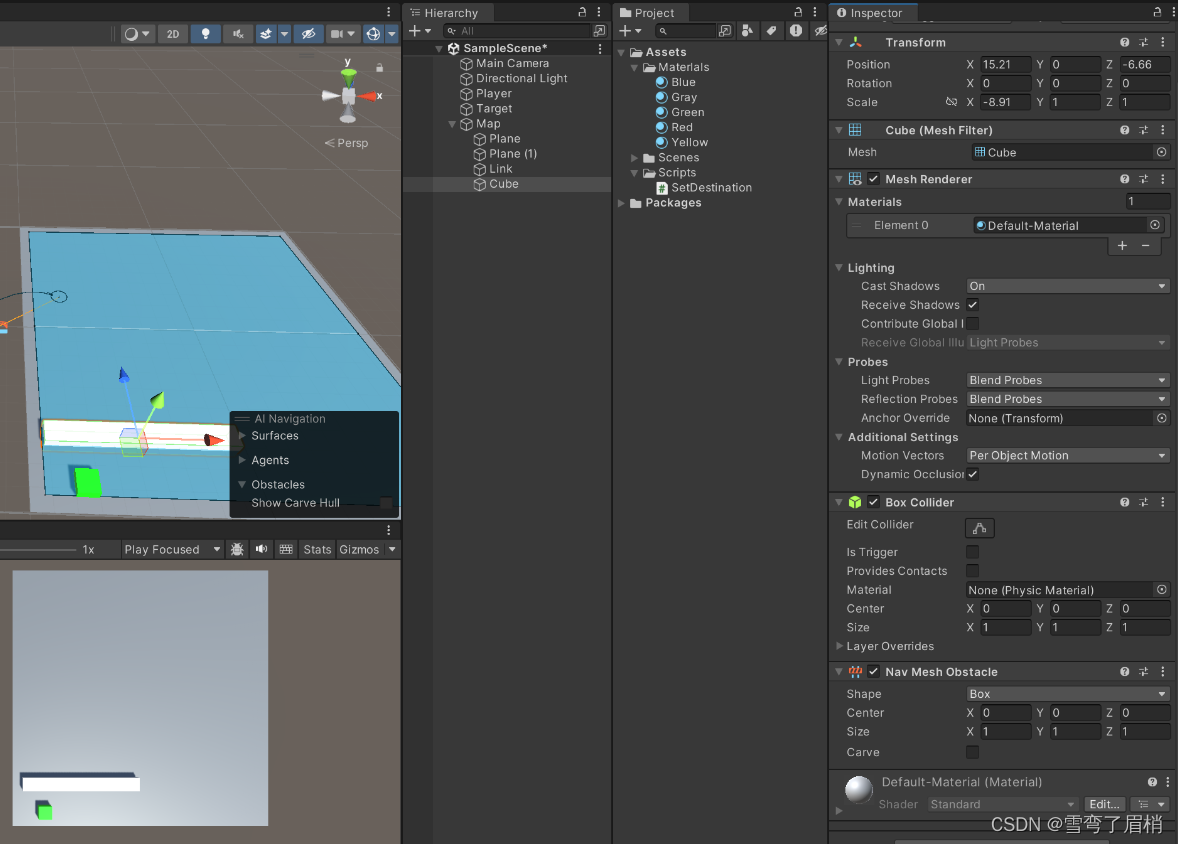
5.NavMeshObstacle组件
NavMeshObstacle 是 Unity 中用于导航的组件,用于描述移动障碍物,这些障碍物在导航世界中需要被 NavMesh Agents 避开(例如由物理系统控制的桶或箱子)。
以下是 NavMeshObstacle 组件的一些属性介绍:
创建一个模型,添加一个NavMeshObstacle组件

-
Shape:指定障碍物的几何形状。可选择以下形状之一:
-
Box:选择一个立方体形状的障碍物。
- Center:相对于变换位置的立方体中心。
- Size:立方体的尺寸。
-
Capsule:选择一个椭圆形状的障碍物。
- Center:相对于变换位置的胶囊中心。
- Radius:胶囊的半径。
- Height:胶囊的高度。
-
-
Carve:启用此选项后,障碍物在静止时会在
NavMesh中刻出一个洞。当障碍物移动时,它成为一个阻碍物。 -
Move Threshold:设置更新移动刻出洞的阈值距离。当障碍物移动超过此距离时,Unity 将其视为移动中。
-
Time To Stationary:指定障碍物被视为静止的等待时间(以秒为单位)。
-
Carve Only Stationary:启用此选项后,仅当障碍物静止时才会刻出洞。
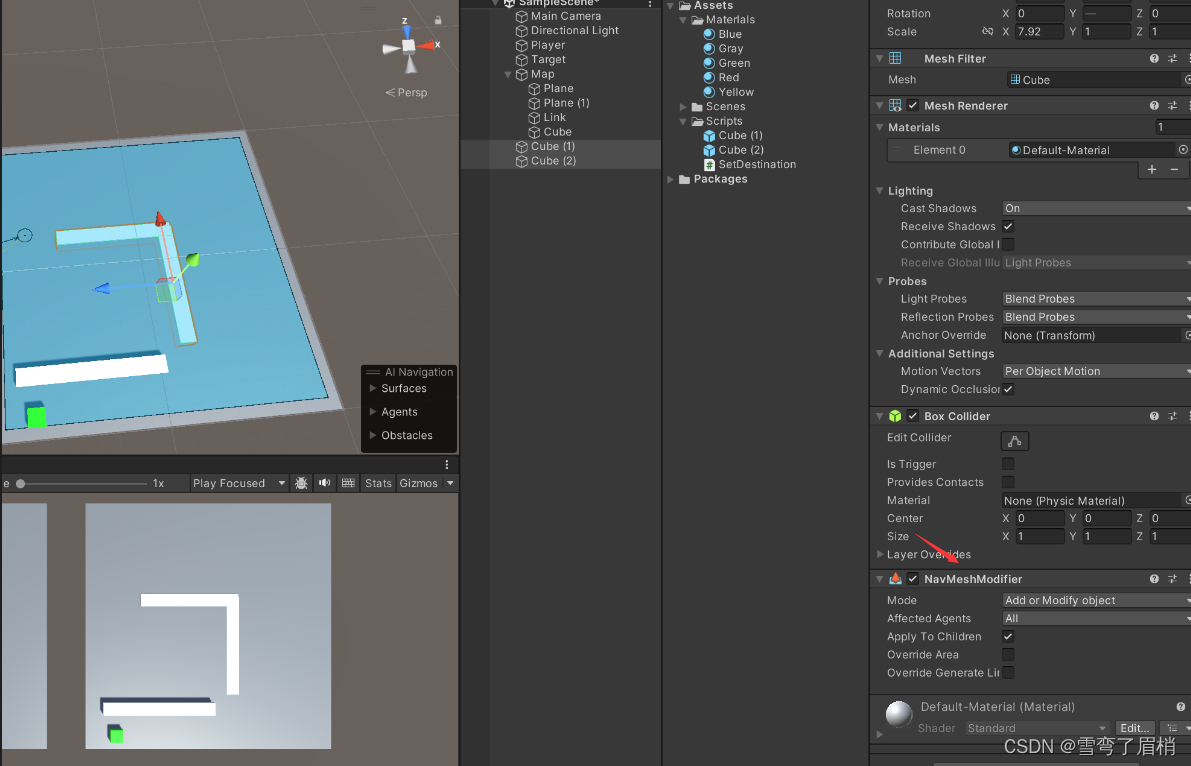
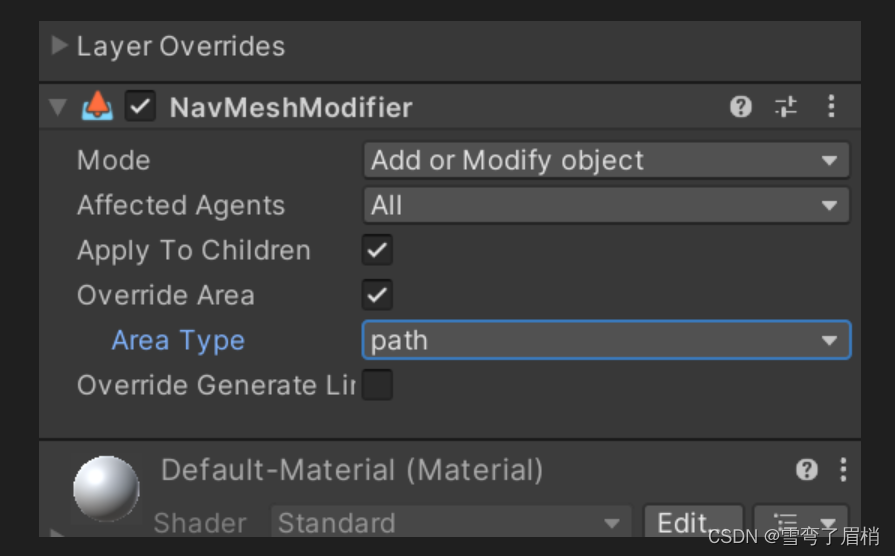
6.NavMeshModifler组件
NavMeshModifier 是 Unity 中用于导航的组件,用于在运行时调整 GameObject 的行为,影响导航网格的生成。以下是 NavMeshModifier 组件的一些属性介绍:
-
Mode:指定是否考虑或忽略受影响的 GameObject。
- Add or Modify Object:在构建 NavMesh 时考虑受影响的 GameObject。
- Remove Object:对于指定的代理类型,在构建 NavMesh 时忽略受影响的对象。
-
Affected Agents :指定 NavMeshModifier 影响的代理类型。
- All:修改所有代理的行为。
- None:排除所有代理的修改行为。
-
Apply to Children:将配置应用于 GameObject 的子级层次结构。如果需要在层次结构的较低级别覆盖此组件的影响,可以添加另一个
NavMeshModifier组件。 -
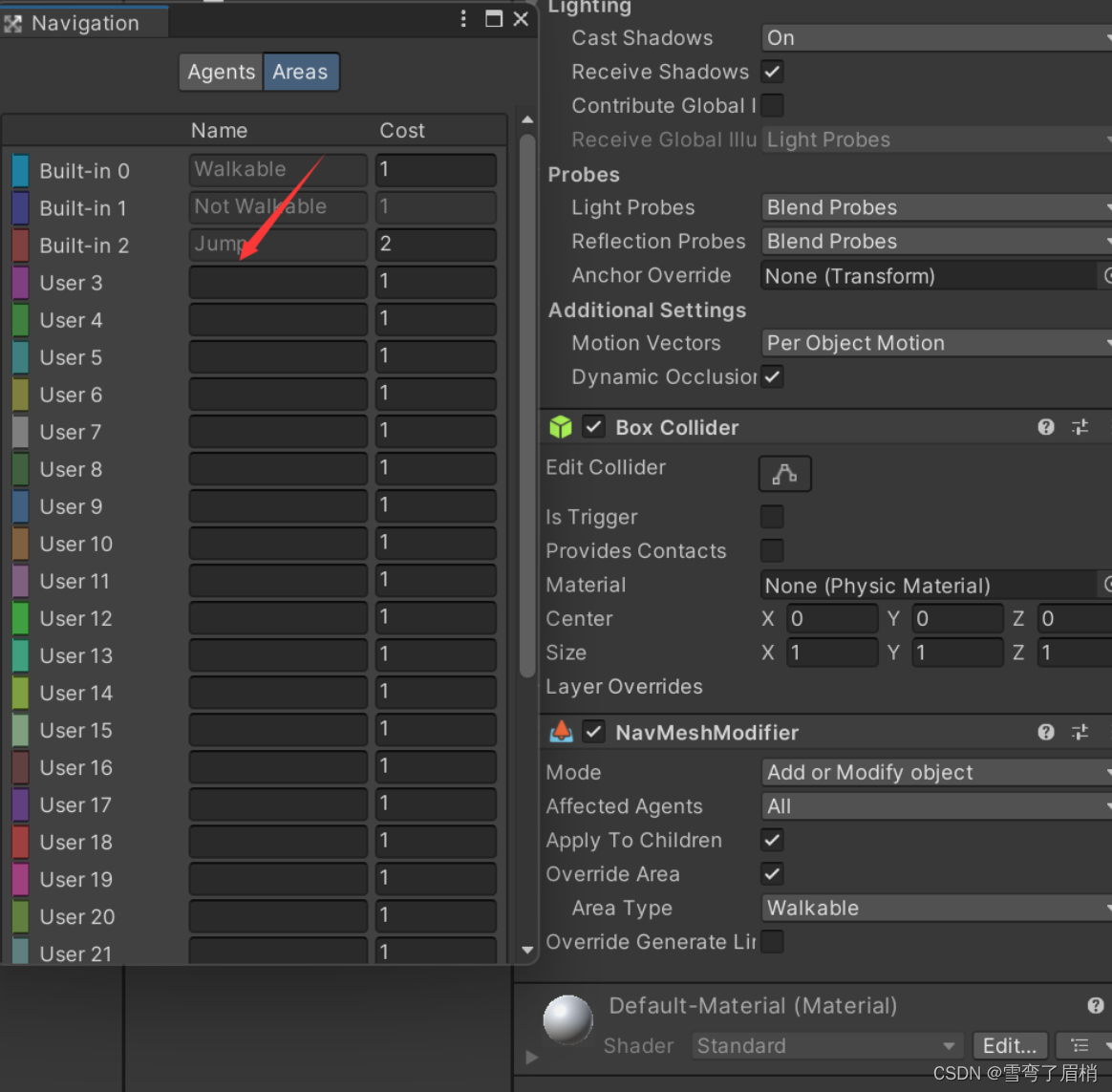
Override Area:更改受影响的 GameObject 的区域类型。如果要更改区域类型,请选中复选框,然后在区域类型下拉菜单中选择新的类型。如果不想更改区域类型,取消选中复选框。
-
Override Generate Links:在生成链接时,强制包括或忽略受影响的 GameObject。
-
Generate Links:指定在生成链接时是否包括受影响的 GameObject。如果要在 NavMesh 构建过程中包括 GameObject,请选中此复选框
创建一个路线并挂载NavMeshModifler组件
三、效果

总结
Unity的AI Navigation系统为游戏开发者提供了强大的路径规划和导航功能,使得开发者能够轻松实现游戏中角色的智能行动。通过本文的介绍,希望读者能够对Unity中AI Navigation的基础使用有所了解,并能够在自己的游戏项目中应用起来。