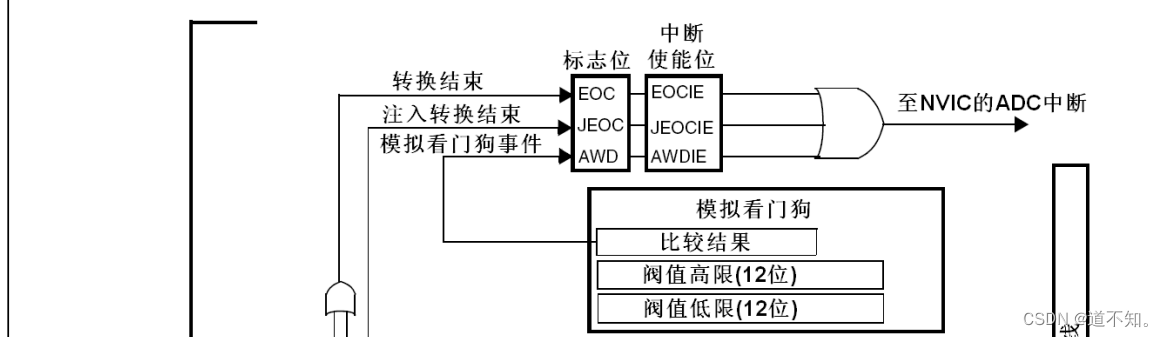
如果被ADC转换的模拟电压低于低阀值或高于高阀值,AWD模拟看门狗状态位被设置。阀值位 于ADC_HTR和ADC_LTR寄存器的最低12个有效位中。通过设置ADC_CR1寄存器的AWDIE位 以允许产生相应中断。通过以下函数可以进行配置
- void ADC_AnalogWatchdogCmd(ADC_TypeDef* ADCx, uint32_t ADC_AnalogWatchdog);
- void ADC_AnalogWatchdogThresholdsConfig(ADC_TypeDef* ADCx, uint16_t HighThreshold, uint16_t LowThreshold);
- void ADC_AnalogWatchdogSingleChannelConfig(ADC_TypeDef* ADCx, uint8_t ADC_Channel);
根据框图修改ADC一节的代码。添加看门狗功能代码和NVIC中断代码
#include "stm32f10x.h" // Device headervoid AD_Init(void)
{RCC_APB2PeriphClockCmd(RCC_APB2Periph_ADC1,ENABLE);RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);GPIO_InitTypeDef GPIO_Init_Structure;//配置为模拟输入模式.在AIN模式下,GPIO是无效的,防止GPIO的输入输出对模拟电压的影响GPIO_Init_Structure.GPIO_Mode=GPIO_Mode_AIN;GPIO_Init_Structure.GPIO_Pin=GPIO_Pin_0;GPIO_Init_Structure.GPIO_Speed=GPIO_Speed_50MHz;GPIO_Init(GPIOA,&GPIO_Init_Structure);GPIO_Init_Structure.GPIO_Mode=GPIO_Mode_Out_PP;GPIO_Init_Structure.GPIO_Pin=GPIO_Pin_1;GPIO_Init_Structure.GPIO_Speed=GPIO_Speed_50MHz;GPIO_Init(GPIOA,&GPIO_Init_Structure);RCC_ADCCLKConfig(RCC_PCLK2_Div6); //12MHZADC_RegularChannelConfig(ADC1,ADC_Channel_0,1,ADC_SampleTime_55Cycles5); //55.5+12.5=68ADC_InitTypeDef ADC_InitStruct;ADC_InitStruct.ADC_ContinuousConvMode=DISABLE;ADC_InitStruct.ADC_ScanConvMode=DISABLE;ADC_InitStruct.ADC_DataAlign=ADC_DataAlign_Right;ADC_InitStruct.ADC_ExternalTrigConv=ADC_ExternalTrigConv_None;ADC_InitStruct.ADC_Mode=ADC_Mode_Independent;ADC_InitStruct.ADC_NbrOfChannel=1;ADC_Init(ADC1,&ADC_InitStruct);//模拟看门狗ADC_AnalogWatchdogSingleChannelConfig(ADC1,ADC_Channel_0); //配置通道ADC_AnalogWatchdogThresholdsConfig(ADC1,3000,0); //阈值ADC_AnalogWatchdogCmd(ADC1,ADC_AnalogWatchdog_SingleRegEnable);//一定不要忘了使能看门狗中断ADC_ITConfig(ADC1,ADC_IT_AWD,ENABLE);NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);NVIC_InitTypeDef NVIC_InitStruct;NVIC_InitStruct.NVIC_IRQChannel=ADC1_2_IRQn;NVIC_InitStruct.NVIC_IRQChannelCmd=ENABLE;NVIC_InitStruct.NVIC_IRQChannelPreemptionPriority=2;NVIC_InitStruct.NVIC_IRQChannelSubPriority=1;NVIC_Init(&NVIC_InitStruct);//使能ADC_Cmd(ADC1,ENABLE);//复位校准ADC_ResetCalibration(ADC1); //ADCx->CR2 |= CR2_RSTCAL_Set;while(ADC_GetResetCalibrationStatus(ADC1) == SET); //该位由软件设置并由硬件清除。在校准寄存器被初始化后该位将被清除ADC_StartCalibration(ADC1);while(ADC_GetCalibrationStatus(ADC1) == SET);}uint16_t AD_GetValue(void)
{//软件触发转换ADC_SoftwareStartConvCmd(ADC1,ENABLE);//不能用这个函数:由软件设置该位以启动转换,转换开始后硬件马上清除此位。//ADC_GetSoftwareStartConvStatus()//该位由硬件在(规则或注入)通道组转换结束时设置,由软件清除或由读取ADC_DR时清除。0:转换未完成;1:转换完成。while(ADC_GetFlagStatus(ADC1,ADC_FLAG_EOC) ==RESET);return ADC_GetConversionValue(ADC1);
}
使用光敏电阻模块,当模拟数值超过阈值,进入中断,即光线弱时led灯点亮。
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "LED.H"
#include "Key.h"
#include "OLED.H"
#include "AD.H"uint16_t light,temp;
uint8_t flag=0;int main(void)
{OLED_Init();AD_Init();GPIO_SetBits(GPIOA,GPIO_Pin_1);while(1){light = AD_GetValue();OLED_ShowNum(1,1,light,4);if(flag==1){GPIO_ResetBits(GPIOA,GPIO_Pin_1);flag=0;}else{GPIO_SetBits(GPIOA,GPIO_Pin_1);}}
}void ADC1_2_IRQHandler(void)
{if(ADC_GetITStatus(ADC1,ADC_IT_AWD) == SET){flag=1;ADC_ClearITPendingBit(ADC1,ADC_IT_AWD);}
}