51单片机学习笔记12 SPI接口 使用1302时钟
- 一、DS1302简介
- 1. 功能特性
- 2. 涓流充电
- 3. 接口介绍
- 时钟数据和控制线:
- 电源线:
- 备用电池连接:
- 二、寄存器介绍
- 1. 控制寄存器
- 2. 时间寄存器
- 3. 日历/时钟寄存器
- 三、BCD码介绍
- 四、DS1302时序
- 1. 读时序
- 2. 写时序
- 五、实现
- 1. 硬件原理图
- 2. ds1302.h
- 3. ds1302.c
- 4. main.c

一、DS1302简介
1. 功能特性
DS1302是一款由Maxim Integrated公司生产的实时时钟(RTC)芯片。
RTC芯片用于计算机和其他电子设备中的时间和日期的集成电路,通常被用于电子时钟、计时器、温度记录器等应用中。
DS1302部分功能特性:
- 实时时钟功能:提供年、月、日、时、分、秒等时间数据。
- 串行接口:通过串行接口(如SPI)与微控制器进行通信。
- 低功耗设计:具有低功耗特性,在电池供电情况下能够长时间稳定运行。
- 内置晶体振荡器:集成了晶体振荡器,不需要外部晶振。
- 电池备份:支持电池备份以保持时钟运行,即使主电源断电时也能保持时间数据。
- 温度补偿:具有温度补偿功能,可以提高时钟的准确性。
DS1302通常与微控制器或单片机配合使用,通过串行接口进行通信,并通过读写寄存器来配置和读取时间数据。
DS1302工作电压2.0~5.5V。
2. 涓流充电
涓流充电是一种低功率充电方式,它通过限制充电电流的大小来防止电池过度充电和损坏。
DS1302内部集成了涓流充电电路,它会在主电源供电时通过合适的电阻限制充电电流,以适当的速率充电芯片内部的备用电池。一旦电池被充满,充电电路会自动停止充电,以防止过度充电。
当主电源断电时,DS1302会自动从备用电池供电,保持时钟和日期功能正常运行。备用电池通常是一个较小的锂电池,它能够提供足够的电力维持DS1302的基本功能长达数年。
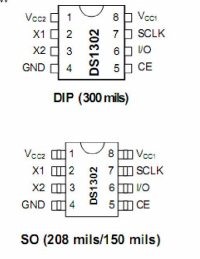
3. 接口介绍
DS1302实时时钟芯片具有串行接口,通常使用3线或4线SPI(Serial Peripheral Interface)进行通信。以下是DS1302的主要接口:
时钟数据和控制线:
- CE(Chip Enable):芯片使能线,用于启用DS1302的通信。
- IO(Data I/O):数据输入/输出线,用于与微控制器进行数据交换。
- SCLK(Serial Clock):串行时钟线,用于同步数据传输。
电源线:
- VCC:芯片供电正极。
- GND:芯片地线。
备用电池连接:
- VBAT:备用电池正极,用于备份时钟数据。
- GND(BAT):备用电池地线。
二、寄存器介绍
1. 控制寄存器

- BIT7 MSB,1时定稿,0时禁止对DS1302写入
- BIT6 0:时钟/日历;1RAM数据
- BIT5~BIT1:输入输出的寄存器
- BIT0 LSB,0时写操作,1时读操作。
2. 时间寄存器
| 寄存器 | D7 | D6 | D5 | D4 | D3 | D2 | D1 | D0 |
|---|---|---|---|---|---|---|---|---|
| 1 | RAM/CK | A4 | A3 | A2 | A1 | A0 | R/W | |
| 秒 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0/1 |
| 分 | 1 | 0 | 0 | 0 | 0 | 0 | 1 | 0/1 |
| 小时 | 1 | 0 | 0 | 0 | 0 | 1 | 0 | 0/1 |
| 日 | 1 | 0 | 0 | 0 | 0 | 1 | 1 | 0/1 |
| 月 | 1 | 0 | 0 | 0 | 1 | 0 | 0 | 0/1 |
| 星期 | 1 | 0 | 0 | 0 | 1 | 0 | 1 | 0/1 |
| 年 | 1 | 0 | 0 | 0 | 1 | 1 | 0 | 0/1 |
3. 日历/时钟寄存器
BCD码格式存入。
| 寄存器名称 | 取值范围 | D7 | D6 | D5 | D4 | D3 | D2 | D1 | D0 |
|---|---|---|---|---|---|---|---|---|---|
| 秒寄存器 | 00-59 | CH | 秒的十位 | 秒的个位 | |||||
| 分寄存器 | 00-59 | 0 | 分的十位 | 分的个位 | |||||
| 小时寄存器 | 01-12或00-23 | 12/24 | 0 | a/p | HR | 小时的个位 | |||
| 日寄存器 | 01-31 | 0 | 0 | 日的十位 | 日的个位 | ||||
| 月寄存器 | 01-12 | 0 | 0 | 0 | 1/0 | 月的个位 | |||
| 星期寄存器 | 01-07 | 0 | 0 | 0 | 0 | 星期几 | |||
| 年寄存器 | 01-99 | 年的十位 | 年的个位 | ||||||
| 写保护寄存器 | WP=1保护 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | |
| 慢充电寄存器 | TCS | TCS | TCS | TCS | DS | DS | RS | RS | |
| 时钟突发寄存器 | |||||||||
三、BCD码介绍
BCD(Binary-Coded Decimal)码是一种数字编码方式,用于表示十进制数字的二进制形式。在BCD编码中,每个十进制数字(0到9)都用4位二进制数表示。这种编码方式可以使计算机更方便地处理十进制数字。
BCD码的基本原理是将一个十进制数的每一位分别用二进制数表示,例如将十进制数 45 分别用BCD编码表示:
- 数字 4 的BCD编码为 0100
- 数字 5 的BCD编码为 0101
因此,数字 45 的BCD编码为 0100 0101。
BCD码有几种常见的表示方法:
-
8421码:每个十进制数字用4位二进制数表示,范围从 0000 到 1001。这种编码方式的名称来自每个位上的权重,分别是8、4、2和1。例如,十进制数 7 的BCD编码为 0111。
-
2421码:类似于8421码,但在前四个数字中,9表示为 1001,而不是 1000。这种编码方式的目的是为了简化BCD加法的实现。
-
Excess-3码:在8421码的基础上,每个数字都加上了3。例如,数字 0 的8421码是 0000,加上3后变为 0011。
DS1302实时时钟芯片使用的是8421码(也称为8421BCD码)
四、DS1302时序
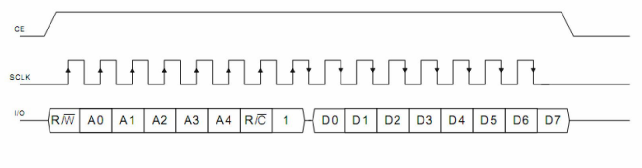
1. 读时序
单字节读:
-
CE:高电平使能
-
SCLK:时钟
-
IO:数据读
-
I/O设置为输入
-
- 在时钟上升沿写入,从低向高写入;
-
第一个字节是写入指令
-
I/O设置为输出
-
后一个字节是读操作
-
写入完成后,在下一个时钟下降沿读;
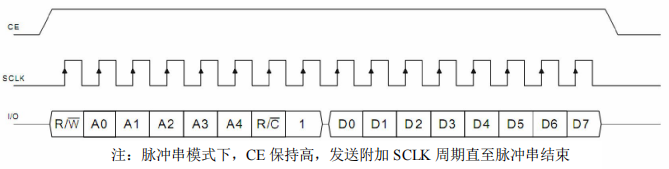
2. 写时序
单字节写:
五、实现
1. 硬件原理图
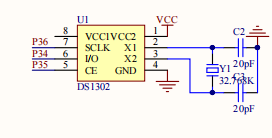
下面代码在数码管显示时间。
2. ds1302.h
//
// 时钟芯片
//#ifndef LESSON11_DS1302_H
#define LESSON11_DS1302_H
#include <reg52.h>
#include "types.h"sbit DS1302_CE = P3^5;
// 时钟口
sbit DS1302_CLK = P3^6;
// IO 口
sbit DS1302_IO = P3^4;/**
* 写入一个字节
*/
void ds1302_write_byte(u8 addr, u8 dat);
/**
* 读取一个字节
*/
u8 ds1302_read_byte(u8 addr);//变量声明
extern u8 gDS1302_TIME[7];//存储时间void ds1302_init(void);
void ds1302_read_time(void);
#endif //LESSON11_DS1302_H3. ds1302.c
//
// 时钟芯片
//
#include "ds1302.h"
#include "intrins.h"// DS1302写入和读取的地址命令
u8 gREAD_RTC_ADDR[7] = {0x81, // 二进制 1000 0001 , 表示: 1000 0000 读取秒0x83, // 1000 0011 读取分 0x85, // 1000 0101 读取时0x87, // 1000 0111 读取日0x89, // 1000 1001 读取月0x8b, // 1000 1011 读取星期0x8d // 1000 1101 读取年};
u8 gWRITE_RTC_ADDR[7] = {0x80, 0x82, 0x84, 0x86, 0x88, 0x8a, 0x8c};
// DS1302 初始化要写入的时间
u8 gDS1302_TIME[7] = {0x47, // 秒0x56, // 分0x15, // 时0x20, // 日0x03, // 月0x05, // 星期0x24 // 年};/**
* 写入一个字节
*/
void ds1302_write_byte(u8 addr, u8 dat){u8 i;// 使能脚复位DS1302_CE = 0;_nop_();// 时钟脚复位DS1302_CLK = 0;_nop_();// 使能脚置高DS1302_CE = 1;_nop_();// 从低位开始写入for(i=0; i<8; i++){// 先发送地址DS1302_IO = addr & 0x01;// 右移一位addr >>= 1;// SLK 上升沿写入DS1302_CLK = 1;_nop_();DS1302_CLK = 0;_nop_();}// 写入数据for(i=0; i<8; i++){// 先发送数据DS1302_IO = dat & 0x01;// 右移一位dat >>= 1;// SLK 上升沿写入DS1302_CLK = 1;_nop_();DS1302_CLK = 0;_nop_();}// 复位DS1302_CE = 0;_nop_();
}
/**
* 读取一个字节
*/
u8 ds1302_read_byte(u8 addr){u8 i;u8 temp = 0;u8 value = 0;// 使能脚复位DS1302_CE = 0;_nop_();// 时钟脚复位DS1302_CLK = 0;_nop_();// 使能脚置高DS1302_CE = 1;_nop_();// 从低位开始写入for(i=0; i<8; i++){// 先发送地址DS1302_IO = addr & 0x01;// 右移一位addr >>= 1;// SLK 上升沿写入DS1302_CLK = 1;_nop_();DS1302_CLK = 0;_nop_();}// 读取数据for(i=0; i<8; i++){temp = DS1302_IO;value = (temp << 7) | (value >> 1);// SLK 下降沿读取DS1302_CLK = 1;_nop_();DS1302_CLK = 0;_nop_();}// 复位DS1302_CE = 0;_nop_();// 释放时钟DS1302_CLK = 1;_nop_();DS1302_IO = 0;_nop_();DS1302_IO = 1;_nop_();return value;
}
/**
* ds1302初始化
*/
void ds1302_init(void){u8 i = 0;// 写入禁止写保护ds1302_write_byte(0x8e, 0x00);// 写数据for(i=0; i<7; i++){ds1302_write_byte(gWRITE_RTC_ADDR[i], gDS1302_TIME[i]);}// 写入启用写保护ds1302_write_byte(0x8e, 0x80);
}
/**
* 写入时间
*/
void ds1302_read_time(void){u8 i=0;for(i=0;i<7;i++){gDS1302_TIME[i]=ds1302_read_byte(gREAD_RTC_ADDR[i]); }
}4. main.c
#include <reg52.h>
#include "led_utils.h"
#include "common_utils.h"
#include "timer_utils.h"
#include "uart_utils.h"
#include "key_utils.h"
#include "eeprom_utils.h"
#include "segment_display_utils.h"
#include "ds1302.h"/**
* @brief 主函数
*/
main()
{u8 time_buf[8];// 关闭所有ledled_all_off();uart_init(0xFA);ds1302_init(); while(1){ds1302_read_time();uart_send(u8_to_hex(gDS1302_TIME[2]));time_buf[0]=gDS1302_TIME[2]/16;time_buf[1]=gDS1302_TIME[2]&0x0f;time_buf[2]=0x10;time_buf[3]=gDS1302_TIME[1]/16;time_buf[4]=gDS1302_TIME[1]&0x0f;time_buf[5]=0x10;time_buf[6]=gDS1302_TIME[0]/16;time_buf[7]=gDS1302_TIME[0]&0x0f;segment_show_u8_array(time_buf);}
}本文代码开源在
https://gitee.com/xundh/learn51










