目录
一、 模块介绍
1.1 产品特色
1.2 产品实物图
1.3 接口定义
1.4 测距调节
1.5 模块工作原理
1.6 注意
二、 编码思路
三、 驱动程序
四、 应用程序
五、 Makefile
六、 其它及实验
一、 模块介绍
超声波测距模块是利用超声波来测距。模块先发送超声波,然后接收反射回来的超声波,由反射经历的时间和声音的传播速度 340m/s,计算得出距离。
SR04 是一款常见的超声波传感器,模块自动发送 8 个 40KHz 的方波,自动检测是否有信号返回,用户只需提供一个触发信号,随后检测回响信号的时间长短即可。
SR04 采用 5V 电压,静态电流小于 2mA,感应角度最大约 15 度,探测距离约 2cm-450cm。
SR04 模块上面有四个引脚,分别为: VCC、 Trig、 Echo、 GND。
⚫ Trig 是脉冲触发引脚,即控制该脚让 SR04 模块开始发送超声波。
⚫ Echo 是回响接收引脚,即 SR04 模块一旦接收到超声波的返回信号则输出
回响信号,回响信号的脉冲宽度与所测距离成正比。
1.1 产品特色
1、典型工作用电压:5V
2、超小静态工作电流:小于 5mA
3、感应角度(R3 电阻越大,增益越高,探测角度越大):
R3 电阻为 392,不大于 15 度
R3 电阻为 472, 不大于 30 度
4、探测距离(R3 电阻可调节增益,即调节探测距离):
R3 电阻为 392 2cm-450cm
R3 电阻为 472 2cm-700cm
5、高精度:可达 0.3cm
6、盲区(2cm)超近
1.2 产品实物图


1.3 接口定义
Vcc、 Trig(控制端)、 Echo(接收端)、 Gnd
本产品使用方法:控制口发一个 10US 以上的高电平,就可以在接收口等待高电平输出.一有输出就可以开定时器计时,当此口变为低电平时就可以读定时器的值,此时就为此次测距的时间,方可算出距离.如此不断的周期测,就可以达到你移动测量的值了。
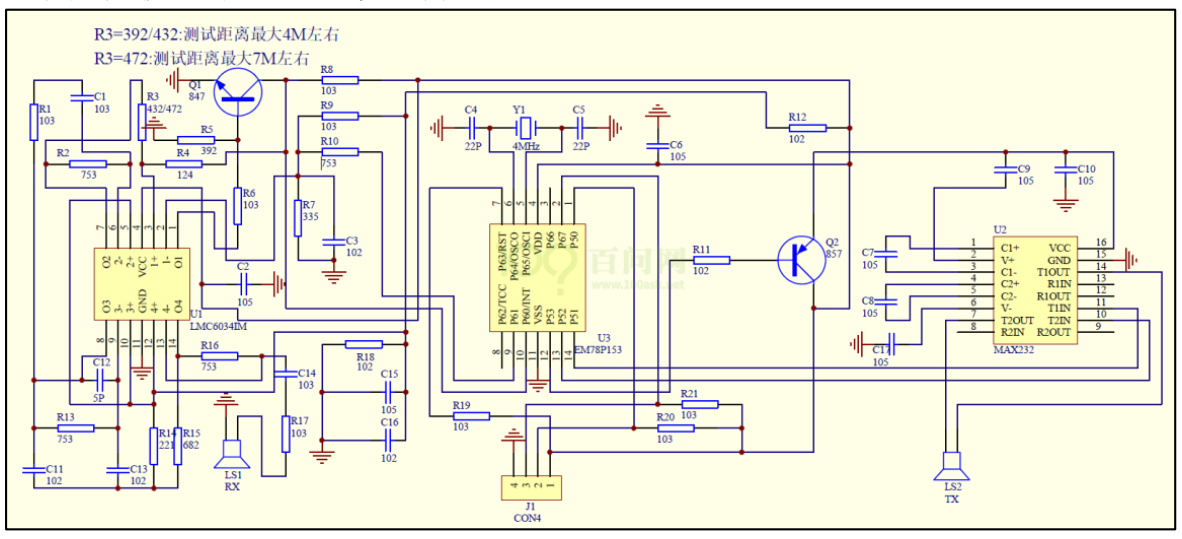
1.4 测距调节
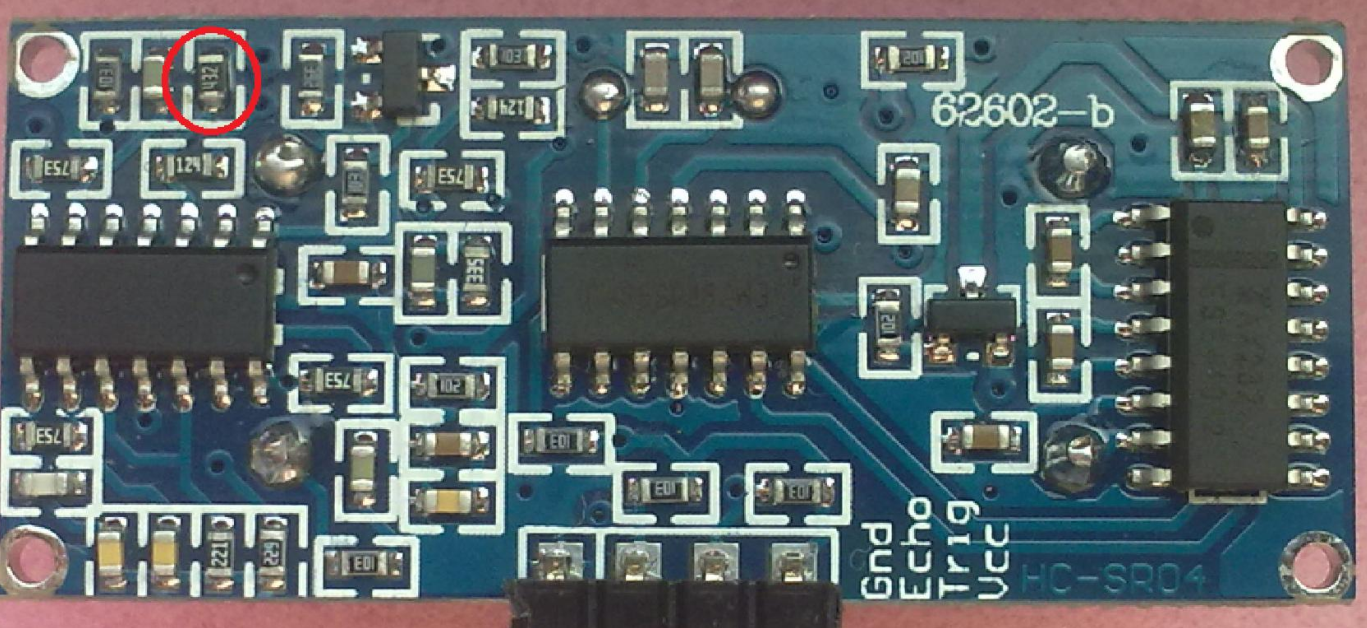
上图标志电阻即 R3,可以调节最大探测距离。R3 电阻为 392,探测距离最大 4.5M 左右,探测角度小于 15 度;R3 电阻为 472,探测距离最大 7M 左右,探测角度小于 30 度;出厂默认 392,即最大探测距离 4.5M 左右。R3 电阻大,接收部分增益高,检测距离大,但检测角度会相应变大,容易检测到前方旁边的物体。当然,客户在不要求很高的测试距离的条件下,可以改小 R3 来减小探测角度,这时最大测距会减小。
1.5 模块工作原理
(1)采用 IO 触发测距,给至少 10us 的高电平信号;
(2)模块自动发送 8 个 40khz 的方波,自动检测是否有信号返回;
(3)有信号返回,通过 IO 输出一高电平,高电平持续的时间就是
(4)超声波从发射到返回的时间.测试距离=(高电平时间*声速(340M/S))/2;
1.6 注意
1:此模块不宜带电连接,如果要带电连接,则先让模块的 Gnd 端先连接。否则会影响模块工作。
2:测距时,被测物体的面积不少于 0.5 平方米且要尽量平整。否则会影响测试结果。
二、 编码思路

我们需要找到trig和echo两个引脚,根据原理给trig发送指定的脉冲信号设备就会发送一个超声波在撞到物体返回后echo会有信号发送我们。回响信号的脉冲宽度和距离成正比。
我们需要用程序记录开始发送高脉冲的时间和接收到高脉冲的时间,这个时间就是实际距离乘以二所对应的时间,声音的传播速度是340米每秒我们就能求出距离了。
三、 驱动程序
#include "asm-generic/gpio.h"
#include "asm/delay.h"
#include <linux/module.h>
#include <linux/poll.h>#include <linux/fs.h>
#include <linux/errno.h>
#include <linux/miscdevice.h>
#include <linux/kernel.h>
#include <linux/major.h>
#include <linux/mutex.h>
#include <linux/proc_fs.h>
#include <linux/seq_file.h>
#include <linux/stat.h>
#include <linux/init.h>
#include <linux/device.h>
#include <linux/tty.h>
#include <linux/kmod.h>
#include <linux/gfp.h>
#include <linux/gpio/consumer.h>
#include <linux/platform_device.h>
#include <linux/of_gpio.h>
#include <linux/of_irq.h>
#include <linux/interrupt.h>
#include <linux/irq.h>
#include <linux/slab.h>
#include <linux/fcntl.h>
#include <linux/timer.h>#define CMD_TRIG 100struct gpio_desc{int gpio;int irq;char *name;int key;struct timer_list key_timer;
} ;static struct gpio_desc gpios[2] = {{115, 0, "trig", },{116, 0, "echo", },
};/* 主设备号 */
static int major = 0;
static struct class *gpio_class;/* 环形缓冲区 */
#define BUF_LEN 128
static int g_keys[BUF_LEN];
static int r, w;struct fasync_struct *button_fasync;#define NEXT_POS(x) ((x+1) % BUF_LEN)static int is_key_buf_empty(void)
{return (r == w);
}static int is_key_buf_full(void)
{return (r == NEXT_POS(w));
}static void put_key(int key)
{if (!is_key_buf_full()){g_keys[w] = key;w = NEXT_POS(w);}
}static int get_key(void)
{int key = 0;if (!is_key_buf_empty()){key = g_keys[r];r = NEXT_POS(r);}return key;
}static DECLARE_WAIT_QUEUE_HEAD(gpio_wait);/* 实现对应的open/read/write等函数,填入file_operations结构体 */
static ssize_t sr04_read (struct file *file, char __user *buf, size_t size, loff_t *offset)
{//printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);int err;int key;if (is_key_buf_empty() && (file->f_flags & O_NONBLOCK))return -EAGAIN;// printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);wait_event_interruptible(gpio_wait, !is_key_buf_empty());key = get_key();err = copy_to_user(buf, &key, 4);return 4;
}static unsigned int sr04_poll(struct file *fp, poll_table * wait)
{//printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);poll_wait(fp, &gpio_wait, wait);return is_key_buf_empty() ? 0 : POLLIN | POLLRDNORM;
}static int sr04_fasync(int fd, struct file *file, int on)
{if (fasync_helper(fd, file, on, &button_fasync) >= 0)return 0;elsereturn -EIO;
}// ioctl(fd, CMD, ARG)
static long sr04_ioctl(struct file *filp, unsigned int command, unsigned long arg)
{// send trig switch (command){case CMD_TRIG:{//printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);gpio_set_value(gpios[0].gpio, 1);udelay(20);gpio_set_value(gpios[0].gpio, 0);}}return 0;
}/* 定义自己的file_operations结构体 */
static struct file_operations sr04_drv = {.owner = THIS_MODULE,.read = sr04_read,.poll = sr04_poll,.fasync = sr04_fasync,.unlocked_ioctl = sr04_ioctl,
};static irqreturn_t sr04_isr(int irq, void *dev_id)
{struct gpio_desc *gpio_desc = dev_id;int val;static u64 rising_time = 0;u64 time;val = gpio_get_value(gpio_desc->gpio);//printk("sr04_isr echo pin %d is %d\n", gpio_desc->gpio, val);if (val){/* 上升沿记录起始时间 */rising_time = ktime_get_ns();}else{if (rising_time == 0){//printk("missing rising interrupt\n");return IRQ_HANDLED;}/* 下降沿记录结束时间, 并计算时间差, 计算距离 */time = ktime_get_ns() - rising_time;rising_time = 0;put_key(time);wake_up_interruptible(&gpio_wait);kill_fasync(&button_fasync, SIGIO, POLL_IN);}return IRQ_HANDLED;
}/* 在入口函数 */
static int __init sr04_init(void)
{int err;printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);// trig pinerr = gpio_request(gpios[0].gpio, gpios[0].name);gpio_direction_output(gpios[0].gpio, 0);// echo pin{ gpios[1].irq = gpio_to_irq(gpios[1].gpio);err = request_irq(gpios[1].irq, sr04_isr, IRQF_TRIGGER_RISING | IRQF_TRIGGER_FALLING, gpios[1].name, &gpios[1]);}/* 注册file_operations */major = register_chrdev(0, "100ask_sr04", &sr04_drv); /* /dev/gpio_desc */gpio_class = class_create(THIS_MODULE, "100ask_sr04_class");if (IS_ERR(gpio_class)) {printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);unregister_chrdev(major, "100ask_sr04");return PTR_ERR(gpio_class);}device_create(gpio_class, NULL, MKDEV(major, 0), NULL, "sr04"); /* /dev/sr04 */return err;
}/* 有入口函数就应该有出口函数:卸载驱动程序时,就会去调用这个出口函数*/
static void __exit sr04_exit(void)
{printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);device_destroy(gpio_class, MKDEV(major, 0));class_destroy(gpio_class);unregister_chrdev(major, "100ask_sr04");// trig pingpio_free(gpios[0].gpio);// echo pin{free_irq(gpios[1].irq, &gpios[1]);}
}/* 7. 其他完善:提供设备信息,自动创建设备节点 */module_init(sr04_init);
module_exit(sr04_exit);MODULE_LICENSE("GPL");四、 应用程序
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <unistd.h>
#include <stdio.h>
#include <string.h>
#include <poll.h>
#include <signal.h>
#include <sys/ioctl.h>#define CMD_TRIG 100static int fd;/** ./button_test /dev/sr04**/
int main(int argc, char **argv)
{int val;struct pollfd fds[1];int timeout_ms = 5000;int ret;int flags;int i;/* 1. 判断参数 */if (argc != 2) {printf("Usage: %s <dev>\n", argv[0]);return -1;}/* 2. 打开文件 */fd = open(argv[1], O_RDWR);if (fd == -1){printf("can not open file %s\n", argv[1]);return -1;}while (1){ioctl(fd, CMD_TRIG);printf("I am goning to read distance: \n");if (read(fd, &val, 4) == 4)printf("get distance: %d cm\n", val*17/1000000);elseprintf("get distance err\n");sleep(1);}close(fd);return 0;
}五、 Makefile
我又做了一些优化增加了卸载模块功能
CC := $(CROSS_COMPILE)gcc
MODE_NAME = sr04
FILE_NAME = $(MODE_NAME)_test
DRIVER_NAME = $(MODE_NAME)_drv
# 定义NFS根文件系统目录
FS_FILE = ~/nfs_rootfs/KERN_DIR = /home/book/program/100ask_imx6ull_mini-sdk/Linux-4.9.88 # 板子所用内核源码的目录# 默认目标
all: @echo "Starting build process..." @echo "Building kernel modules..." make -C $(KERN_DIR) M=$(PWD) modules @echo "Building $(FILE_NAME) test program..." $(CC) -o $(FILE_NAME) $(FILE_NAME).c # 安装目标
install: @echo "Installing $(DRIVER_NAME).ko to $(FS_FILE)..." cp ./$(DRIVER_NAME).ko $(FS_FILE) @echo "$(DRIVER_NAME).ko installed." @echo "Installing $(FILE_NAME) to $(FS_FILE)..." cp ./$(FILE_NAME) $(FS_FILE) @echo "$(FILE_NAME) installed." uninstall:rm -rf $(FS_FILE)$(FILE_NAME)rm -rf $(FS_FILE)$(DRIVER_NAME).koclean:make -C $(KERN_DIR) M=`pwd` modules cleanrm -rf modules.order $(FILE_NAME)# 参考内核源码drivers/char/ipmi/Makefile
# 要想把a.c, b.c编译成ab.ko, 可以这样指定:
# ab-y := a.o b.o
# obj-m += ab.oobj-m += $(DRIVER_NAME).o
# 声明伪目标
.PHONY: all clean install uninstall六、 其它及实验
echo "7 4 1 7" > /proc/sys/kernel/printk韦东山老师的6ull打印是默认关闭的上面的命令可以打开。
注意:两次触发时间要大于60ms
注意:相比于中断来说打印是十分耗时的操作会错过下降沿的接收

查看中断

查看gpio

测试