一、代码批注
代码来自:https://scikit-learn.org/stable/auto_examples/cluster/plot_dbscan.html#sphx-glr-auto-examples-cluster-plot-dbscan-py
import numpy as np
from sklearn.cluster import DBSCAN
from sklearn import metrics
from sklearn.datasets import make_blobs
from sklearn.preprocessing import StandardScaler# make_blobs:为聚类产生数据集及其相应的标签;n_samples:样本点个数;centers:类别数;cluster_std:每个类别的方差;random_state:随机种子
# 这里centers里的三个二维坐标,其实代表了聚类的三个中心
centers = [[1, 1], [-1, -1], [1, -1]]
X, labels_true = make_blobs(n_samples=750, centers=centers, cluster_std=0.4, random_state=0)# 标准化
X = StandardScaler().fit_transform(X)# 预估器,并得出模型(eps:数据点的邻域半径;min_samples:某个数据点的邻域内最少有的数据点个数)
db = DBSCAN(eps=0.2, min_samples=7).fit(X)# 生成n_samples个False
core_samples_mask = np.zeros_like(db.labels_, dtype=bool)
# 预测出的结果(有结果的为True,为噪音的是False)
core_samples_mask[db.core_sample_indices_] = True
# 获得预测结果
labels = db.labels_
# 获得预测的聚类数,忽略掉噪音
n_clusters_ = len(set(labels)) - (1 if -1 in labels else 0)
# 获得噪音数
n_noise_ = list(labels).count(-1)# 预测出的集群数,对应图中5中颜色
print('Estimated number of clusters: %d' % n_clusters_)
# 预测出噪音点的数量,对应图中的黑点
print('Estimated number of noise points: %d' % n_noise_)
# 同质性:簇的纯洁程度—对比分类问题的精度
print("Homogeneity: %0.3f" % metrics.homogeneity_score(labels_true, labels))
# 完整性:簇的完整性—对比分类问题的召回率
print("Completeness: %0.3f" % metrics.completeness_score(labels_true, labels))
# v测度:用来评估同一个数据集上两个独立赋值的一致性
print("V-measure: %0.3f" % metrics.v_measure_score(labels_true, labels))
# 调节的兰德系数(ARI):衡量两个数据分布的吻合程度
print("Adjusted Rand Index: %0.3f" % metrics.adjusted_rand_score(labels_true, labels))
# 调整互信息(AMI):衡量两个数据分布的吻合程度
print("Adjusted Mutual Information: %0.3f" % metrics.adjusted_mutual_info_score(labels_true, labels))
# 轮廓系数:将某个对象与自己的簇的相似程度和与其他簇的相似程度进行比较(肘方法)
print("Silhouette Coefficient: %0.3f" % metrics.silhouette_score(X, labels))import matplotlib.pyplot as pltunique_labels = set(labels)
# 给每个label赋个颜色
colors = [plt.cm.Spectral(each) for each in np.linspace(0, 1, len(unique_labels))]
for k, col in zip(unique_labels, colors):# 给噪音为黑色if k == -1:col = [0, 0, 0, 1]# 开始绘制,获得该种类的点class_member_mask = (labels == k)# core_samples_mask里false就是黑色噪音点# 取出同一类的点(这样&可以过滤掉黑点。如果没有core_samples_mask(黑点为false)会把黑点也画很大)xy = X[class_member_mask & core_samples_mask]plt.plot(xy[:, 0], xy[:, 1], 'o', markerfacecolor=tuple(col), markeredgecolor='k', markersize=14)# 获得噪音点,注意:db.core_sample_indices_没出现的的不一定就是噪音点(小圆圈)xy = X[class_member_mask & ~core_samples_mask]plt.plot(xy[:, 0], xy[:, 1], 'o', markerfacecolor=tuple(col), markeredgecolor='k', markersize=6)plt.title('Estimated number of clusters: %d' % n_clusters_)
plt.show()
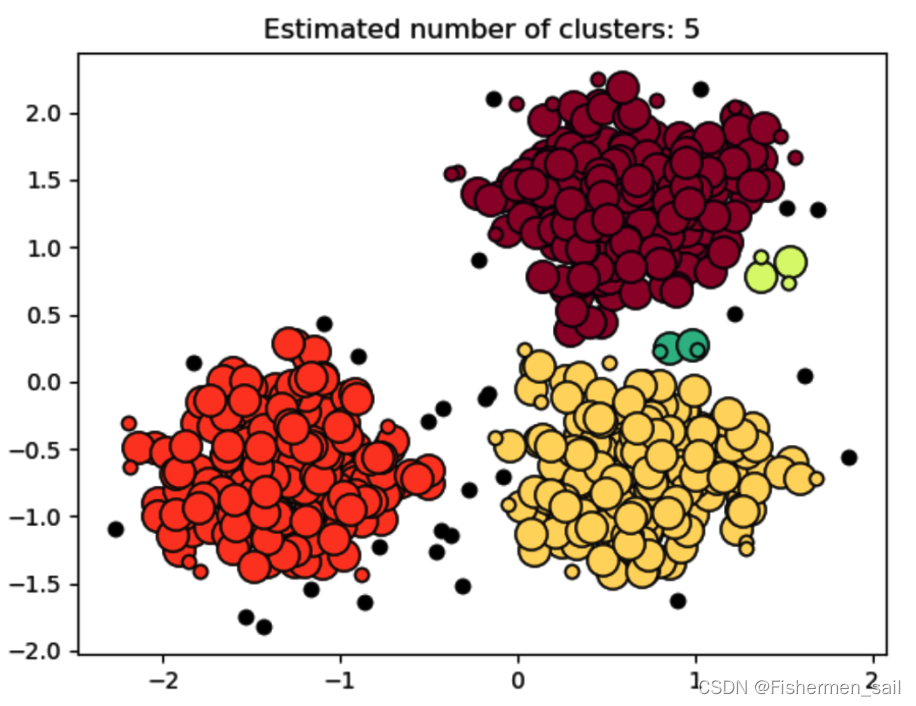
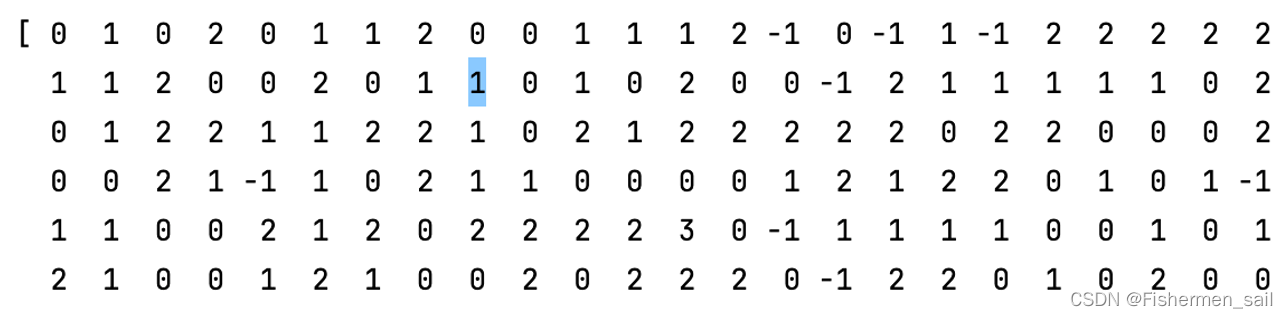
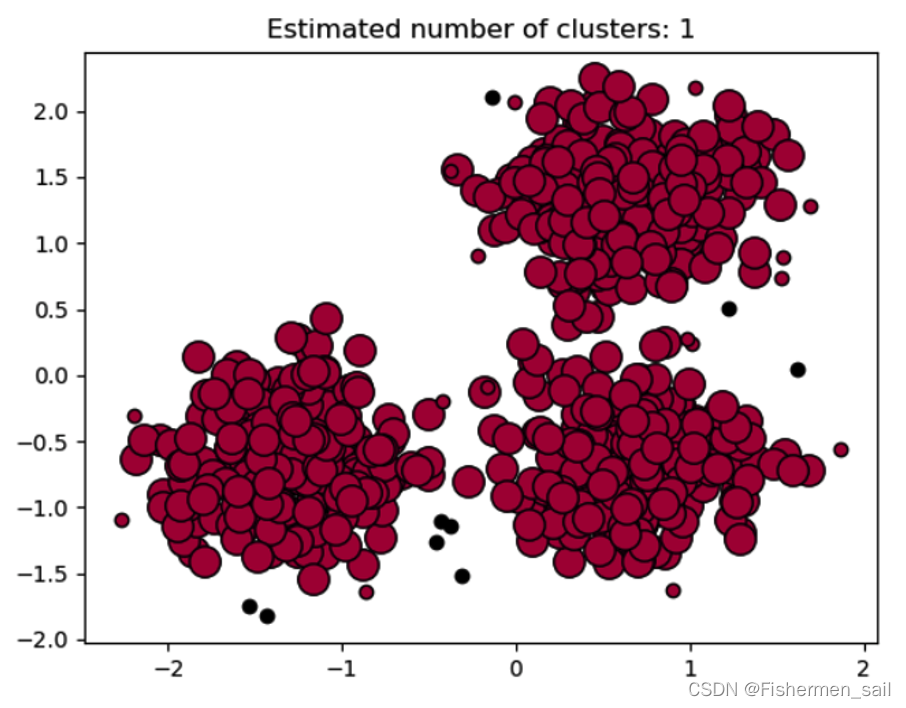
在实验中一直有个困惑,不知道这个小圆圈是怎么画上去的。它的原因是在“db.core_sample_indices_”和“db.labels”,起初我以为“db.core_sample_indices_”会生成除噪音点以外的其他index,也就是区分开了噪音点与聚类点。但其实并不是,有少部分不在“db.core_sample_indices_”中的点也是聚类点,在下方打印出来的值分别与它俩相对,可以看见前者并没有为32的index,理论上它应该为-1噪音点,但打印出“db.labels”发现index为32的值是1,是一个聚类点。这点也在scikit learn文档最后一段进行了说明,文档解释到图中大的圆为“core sample”,而小的圆为“non-core sample”,它也是聚类的一部分。



二、DBSCAN的使用
通过改变DBSCAN中min_samples参数观察图形的聚类效果。
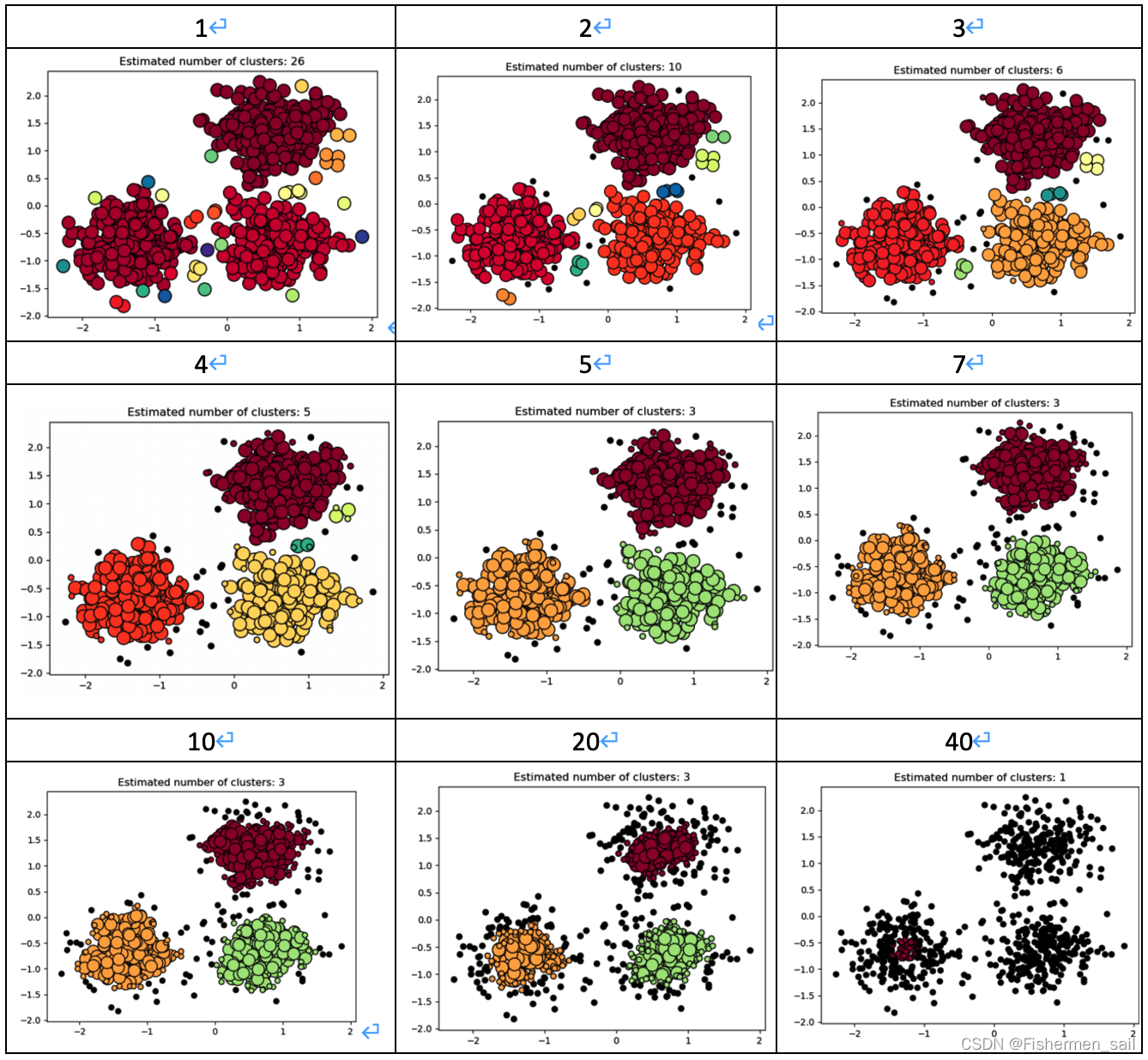
当min_samples为41时编译器报错。

观察上图可以发现随着min_samples的增大cluster越来越少,噪音点越来越多,直至报错。这是因为DBSCAN算法是基于密度的算法,所以它将密集区域内的点看作核心点(核心样本)。它主要有两个参数:min_samples和eps。
eps表示数据点的邻域半径,如果某个数据点的邻域内至少有min_sample个数据点,则将该数据点看作为核心点。如果某个核心点的邻域内有其他核心点,则将它们看作属于同一个簇。如果min_sampLes设置地太大,那么意味着更少的点会成为核心点,而更多的点将被标记为噪声。
如果将eps设置得非常小,则有可能没有点成为核心点,并且可能导致所有点都被标记为噪声。如下图为eps=0.05,min_samples=5的图。
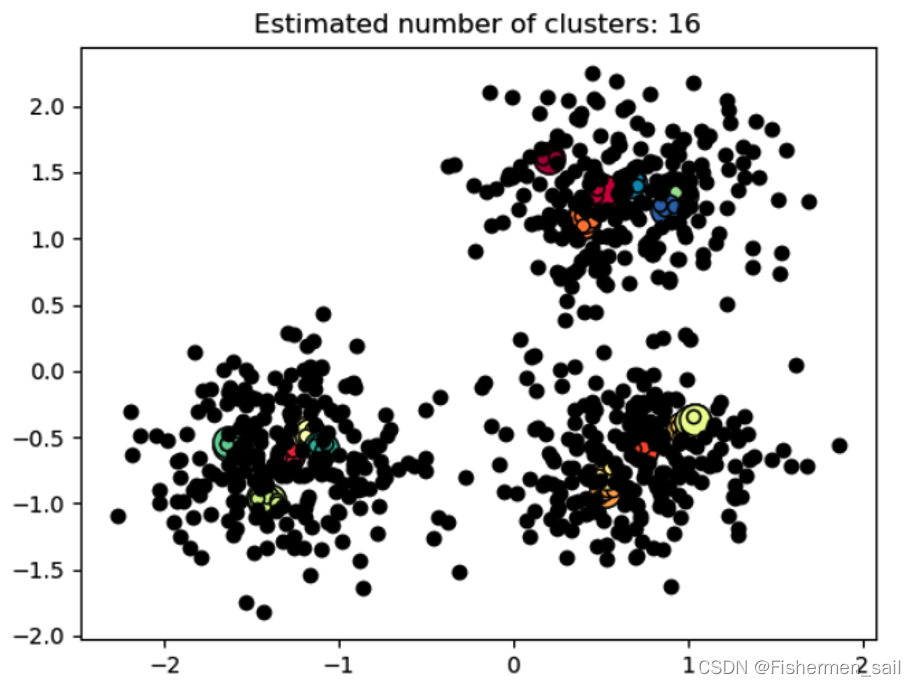
如果将eps设置为非常大,则将导致所有点都被划分到同一个簇。如下图为esp=0.3,min_samples=5的图。
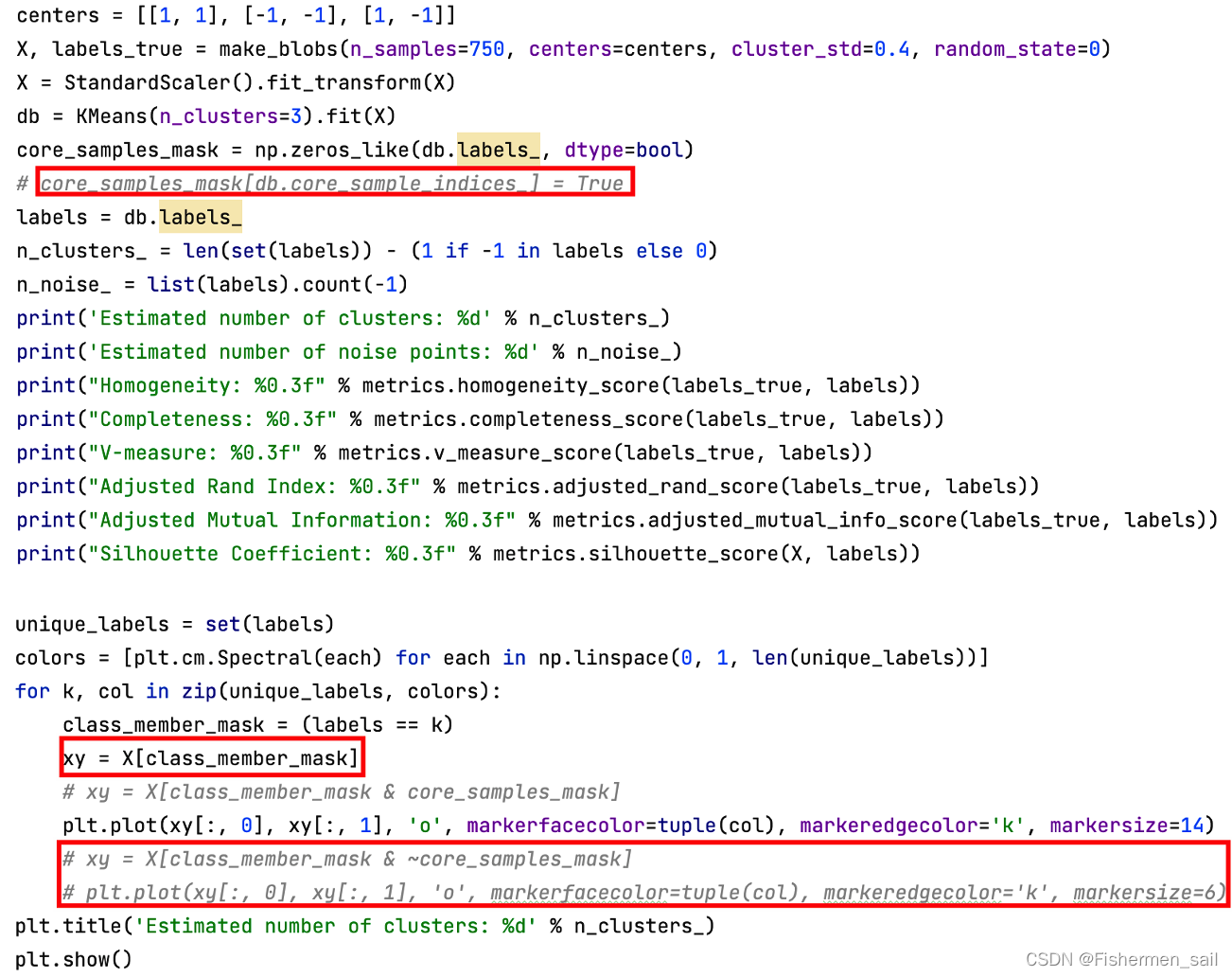
三、KMeans的使用
由于KMeans并没有“core_sample_indices”这个属性,也就是不会分离出噪音点,需将该条语句注释掉。在画图时,由于并没有噪音点,也要进行相应改写。
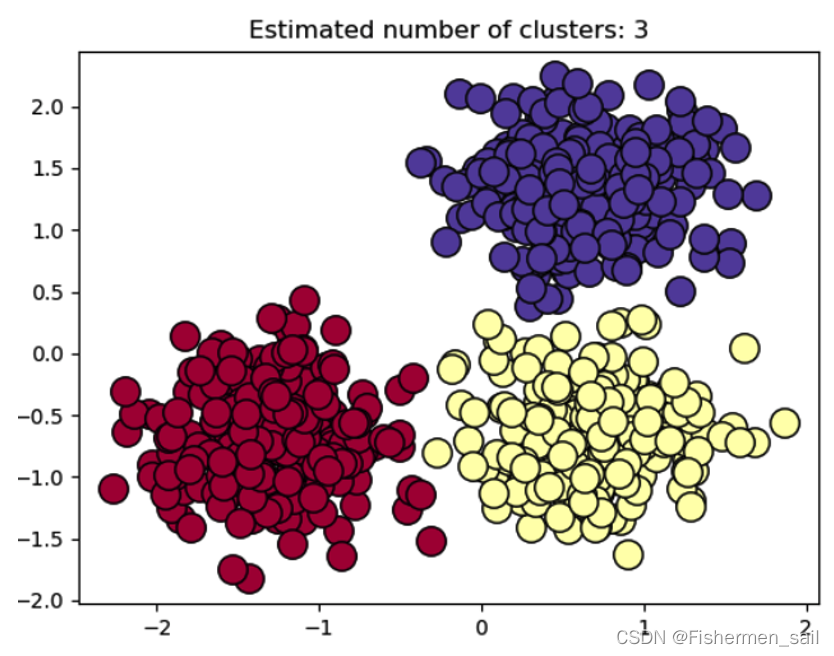
KMeans算法是根据给定的n个数据对象的数据集,构建n个划分聚类的方法,每个划分聚类即为一个簇。该方法将数据划分为n个簇,每个簇至少有一个数据对象,每个数据对象必须属于而且只能属于一个簇。同时要满足同一簇中的数据对象相似度高,不同簇中的数据对象相似度较小。聚类相似度是利用各簇中对象的均值来进行计算的。
KMeans 算法的处理流程如下,首先,随机地选择k个数据对象,每个数据对象代表一个簇中心,即选择k个初始中心;对剩余的每个对象,根据其与各簇中心的相似度(距离),将它赋给与其最相似的簇中心对应的簇;然后重新计算每个簇中所有对象的平均值,作为新的簇中心。不断重复以上这个过程,直到准则函数收敛,也就是簇中心不发生明显的变化。通常采用均方差作为准则函数,即最小化每个点到最近簇中心的距离的平方和。新的簇中心计算方法是计算该簇中所有对象的平均值,也就是分别对所有对象的各个维度的值求平均值,从而得到簇的中心点。
四、KMeans与DBSCAN对比
| KMeans | DBSCAN |
|---|---|
| 使用簇的基于原型的概念。 | 使用基于密度的概念。 |
| 只能用于具有明确定义的质心(如均值)的数据。 | 要求密度定义(基于传统的欧几里得密度概念)对于数据是有意义的。 |
| 需要指定簇的个数作为参数。 | 不需要事先知道要形成的簇类的数量,自动确定簇个数。 |
| 很难处理非球形的簇和不同形状的簇。 | 可以发现任意形状的簇类,可以处理不同大小和不同形状的簇。 |
| 可以用于稀疏的高纬数据,如文档数据。 | 不能很好反映高维数据。 |
| 可以发现不是明显分离的簇,即便簇有重叠也可以发现。 | 会合并有重叠的簇。 |