激光雷达和相机的联合标定工具箱[cam_lidar_calibration]介绍
- 写在前面
- 安装过程
- 调试过程
- 标定成功可视化展示
写在前面
激光雷达和相机联合标定工具
论文地址:https://ieeexplore.ieee.org/stamp/stamp.jsp?tp=&arnumber=9564700
github地址: https://github.com/acfr/cam_lidar_calibration
yutou视频安装讲解:https://www.youtube.com/watch?v=WmzEnjmffQU
标定过程参考链接: https://blog.csdn.net/weixin_41681988/article/details/122867113
安装过程
本地安装
进入工作空间的src文件夹下
git clone -c http.sslverify=false https://gitlab.acfr.usyd.edu.au/its/cam_lidar_calibration.gitsudo apt update && sudo apt-get install -y ros-melodic-pcl-conversions ros-melodic-pcl-ros ros-melodic-tf2-sensor-msgs
pip install pandas scipycatkin build cam_lidar_calibration
source ~/catkin_ws/devel/setup.bash docker安装
进入工作空间的src文件夹下
git clone -c http.sslverify=false https://gitlab.acfr.usyd.edu.au/its/cam_lidar_calibration.gitcd cam_lidar_calibration/docker
./run.sh --cuda on(off)
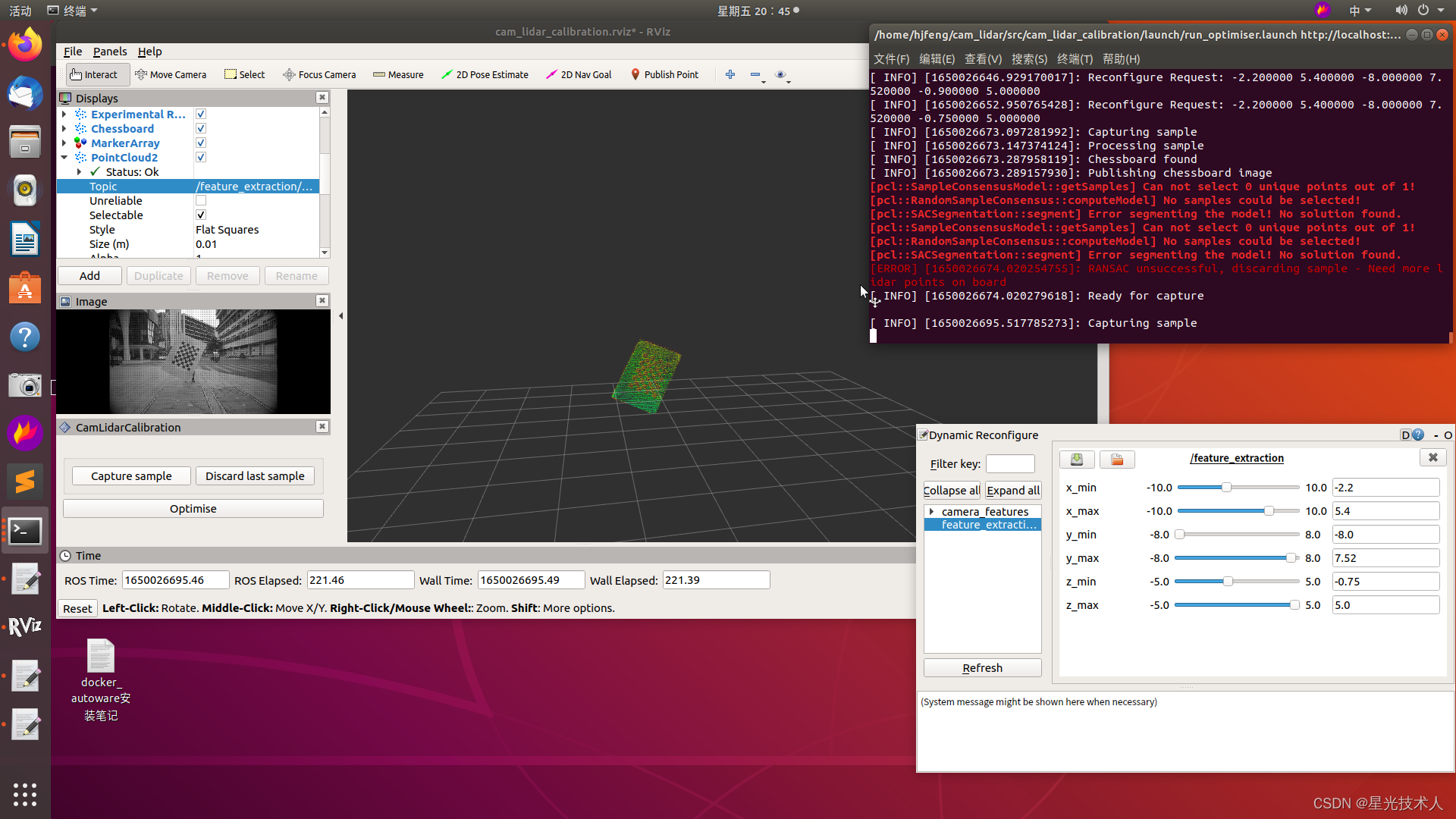
调试过程
quick demo
下载数据(img/pcd),然后产生50个pitch,yaw,roll,x,y,z的结果
roslaunch cam_lidar_calibration run_optimiser.launch import_samples:=true将50个结果平均化,并可视化
roslaunch cam_lidar_calibration assess_results.launch csv:="$(rospack find cam_lidar_calibration)/data/vlp/calibration_quickstart.csv" visualise:=true
== quick demo报错处理==
- 找不到cam_lidar_calibration/visualise_results.py文件路径;
原因是py文件在cam_lidar_calibration文件夹下的scirpts文件夹下;要么将py文件拿出来放在cam_lidar_calibration文件夹下边;要么修改run_optimiser.launch文件中的路径,入下图

2. 显示“: /usr/bin/env “python\r” 找不到那个文件或目录
原因是因为没有直接在linux环境里边克隆。在windows里边克隆或者从u盘里边的的文件直接放在ubuntu会出现这种错误
解决办法如下:
按一下ESC
输入
:set ff #千万别少了“:”冒号
后回车
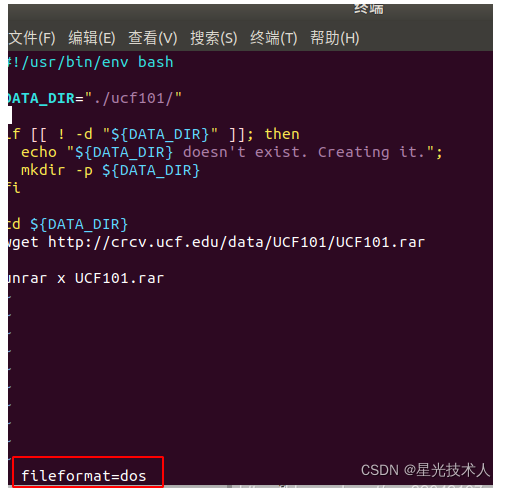
显示格式为doc格式(图片中的内容不是visualise_results.py文件的对应内容,找到网图)
输入
:set ff=unix #千万别少了“:”冒号
后回车,设置为unix格式然后:wq退出
参考链接:
https://blog.csdn.net/weixin_41681988/article/details/122867113
标定成功可视化展示