目录
文章目录
- 目录
- 摘要
- 1.姿态控制为什么要用到四元数
- 2.四元数姿态控制
摘要
本节主要说明清楚ardupilot姿态控制为什么要用到四元数,欢迎批评指正!!!
1.姿态控制为什么要用到四元数
对于ardupilot的姿态控制中主要用PID控制算法,姿态控制采用串级PID控制。主要包含:外环姿态角控制和内环姿态角速度控制,简称姿态串级PID控制。然而姿态控制中的姿态角主要包含:
姿态角:横滚角、俯仰角、偏航角
姿态角速度:横滚角速度、俯仰角速度、偏航角速度
这里我们重点说明外环姿态控制,内环姿态角速度控制不讲解。一般我们进行姿态PID控制需要有两个输入量:目标姿态和实际姿态,然后计算出PID需要的误差进入到PID控制器进行姿态控制,这样是否就可以了呢,比如下面的框图:
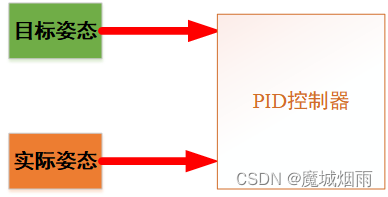
上面直接控制是有条件限制的,为什么???
上面的