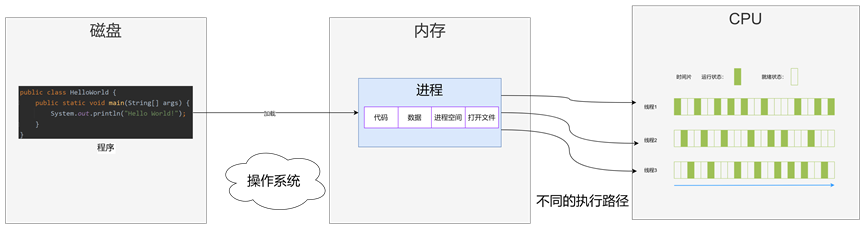
一、光敏传感器简介
光敏传感器是利用光敏元件将光信号转换为电信号的传感器,它的敏感波长在可见光波长附近,包括红外线波长和紫外线波长。光传感器不只局限于对光的探测,它还可以作为探测元件组成其他传感器,对许多非电量进行检测,只要将这些非电量转换为光信号的变化即可。
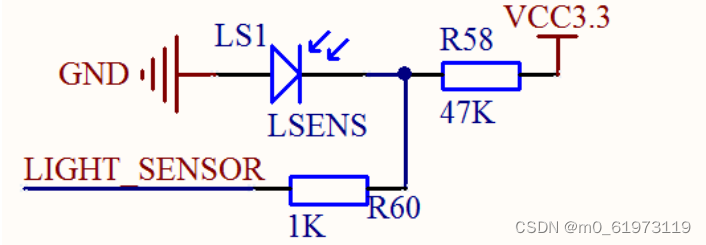
光敏二极管也叫光电二极管。光敏二极管与半导体二极管在结构上是类似的,其管芯是一个具有光敏特征的 PN 结,具有单向导电性,因此工作时需加上反向电压。无光照时,有很小的饱和反向漏电流,即暗电流,此时光敏二极管截止。当受到光照时,饱和反向漏电流大大增加,形成光电流,它随入射光强度的变化而变化。当光线照射 PN 结时,可以使 PN 结中产生电子一空穴对,使少数载流子的密度增加。这些载流子在反向电压下漂移,使反向电流增加。因此可以利用光照强弱来改变电路中的电流。利用这个电流变化,我们串接一个电阻,就可以转换成电压的变化,从而通过 ADC 读取电压值,判断外部光线的强弱。
探索者 STM32F4 开发板板载光敏二极管电路图
二、获取ADC值和电压转换关系
正点原子中提供了Vref+给ADC提供参考电压,Vref+默认是和VDDRA(3.3V)连接

三、不同ADC的通道对应问题(STM32F407ZGT6)

四、代码详解
lsens.c
#include "lsens.h"
#include "delay.h"void Adc3_Init(void)
{ ADC_CommonInitTypeDef ADC_CommonInitStructure;ADC_InitTypeDef ADC_InitStructure;RCC_APB2PeriphClockCmd(RCC_APB2Periph_ADC3, ENABLE); //使能ADC3时钟RCC_APB2PeriphResetCmd(RCC_APB2Periph_ADC3,ENABLE); //ADC3复位RCC_APB2PeriphResetCmd(RCC_APB2Periph_ADC3,DISABLE); //复位结束 ADC_CommonInitStructure.ADC_Mode = ADC_Mode_Independent;//独立模式ADC_CommonInitStructure.ADC_TwoSamplingDelay = ADC_TwoSamplingDelay_5Cycles;//两个采样阶段之间的延迟5个时钟ADC_CommonInitStructure.ADC_DMAAccessMode = ADC_DMAAccessMode_Disabled; //DMA失能ADC_CommonInitStructure.ADC_Prescaler = ADC_Prescaler_Div4;//预分频4分频。ADCCLK=PCLK2/4=84/4=21Mhz,ADC时钟最好不要超过36Mhz ADC_CommonInit(&ADC_CommonInitStructure);//初始化ADC_InitStructure.ADC_Resolution = ADC_Resolution_12b;//12位模式ADC_InitStructure.ADC_ScanConvMode = DISABLE;//非扫描模式 ADC_InitStructure.ADC_ContinuousConvMode = DISABLE;//关闭连续转换ADC_InitStructure.ADC_ExternalTrigConvEdge = ADC_ExternalTrigConvEdge_None;//禁止触发检测,使用软件触发ADC_InitStructure.ADC_DataAlign = ADC_DataAlign_Right;//右对齐 ADC_InitStructure.ADC_NbrOfConversion = 1;//1个转换在规则序列中 也就是只转换规则序列1 ADC_Init(ADC3, &ADC_InitStructure);//ADC初始化ADC_Cmd(ADC3, ENABLE);//开启AD转换器
} u16 Get_Adc3(u8 ch)
{//设置指定ADC的规则组通道,一个序列,采样时间ADC_RegularChannelConfig(ADC3, ch, 1, ADC_SampleTime_480Cycles ); //ADC3,ADC通道,480个周期,提高采样时间可以提高精确度 ADC_SoftwareStartConv(ADC3); //使能指定的ADC3的软件转换启动功能 while(!ADC_GetFlagStatus(ADC3, ADC_FLAG_EOC ));//等待转换结束return ADC_GetConversionValue(ADC3); //返回最近一次ADC3规则组的转换结果
}//初始化光敏传感器
void Lsens_Init(void)
{GPIO_InitTypeDef GPIO_InitStructure;RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOF, ENABLE);//使能GPIOF时钟//先初始化ADC3通道7IO口GPIO_InitStructure.GPIO_Pin = GPIO_Pin_7;//PA7 通道7GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AN;//模拟输入GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_NOPULL ;//不带上下拉GPIO_Init(GPIOF, &GPIO_InitStructure);//初始化 Adc3_Init();//初始化ADC3
}int Lsens_Get_Val(void)
{u32 temp_val=0;u8 t;for(t=0;t<LSENS_READ_TIMES;t++){temp_val+=Get_Adc3(ADC_Channel_5); //读取ADC值,通道5delay_ms(5);}temp_val/=LSENS_READ_TIMES;//得到平均值 return (int)(temp_val);
}
lsens.h
#ifndef __LSENS_H
#define __LSENS_H
#include "sys.h"
#include "adc3.h" #define LSENS_READ_TIMES 10 //定义光敏传感器读取次数,读这么多次,然后取平均值void Adc3_Init(void); //ADC通道初始化
u16 Get_Adc3(u8 ch); //获得某个通道值 void Lsens_Init(void); //初始化光敏传感器
int Lsens_Get_Val(void); //读取光敏传感器的值
#endif main.c
#include "sys.h"
#include "delay.h"
#include "usart.h"
#include "led.h"
#include "lcd.h"
#include "lsens.h"int main(void)
{ int adcx;NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);//设置系统中断优先级分组2delay_init(168); //初始化延时函数uart_init(115200); //初始化串口波特率为115200Lsens_Init(); //初始化光敏传感器while(1){adcx=Lsens_Get_Val();printf("%d\r\n",adcx);delay_ms(1000); }
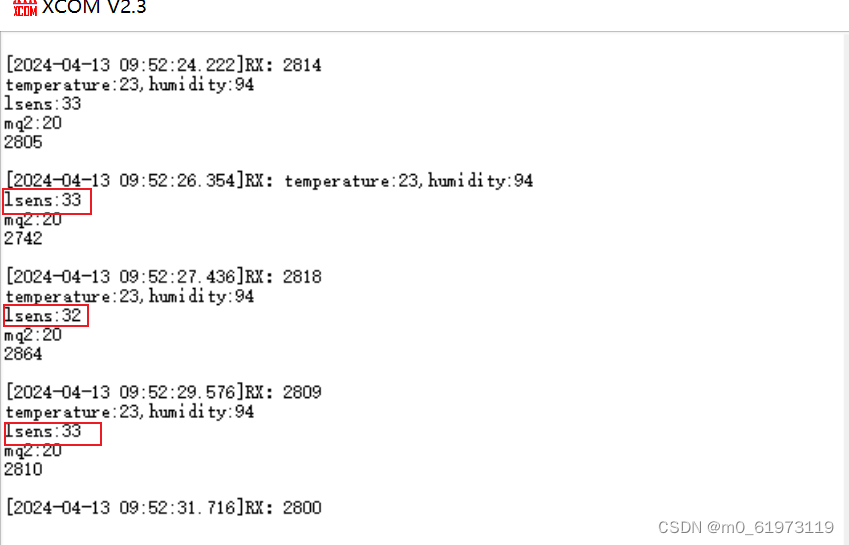
}五、测试结果