注1:本文系“计算成像最新论文速览”系列之一,致力于简洁清晰地介绍、解读非视距成像领域最新的顶会/顶刊论文(包括但不限于 Nature/Science及其子刊; CVPR, ICCV, ECCV, SIGGRAPH, TPAMI; Light‑Science & Applications, Optica 等)。
本次介绍的论文是:激光与光电子学进展, 2023, 非视域成像技术研究进展。

激光与光电子学进展,2023 | 非视域成像技术的新进展
在今天的博客文章中,我们将深入探讨章镇宇等人发表在2023年激光与光电子学进展期刊上的一篇名为《非视域成像技术研究进展》的文章。这篇文章总结了非视域成像技术的最新研究进展,并详细讨论了三种非视域成像模式的特性和局限性。
1. 引言
非视域成像技术的研究和应用具有重要意义,因为它可以重建视线以外的场景。这一技术的发展和进步,可以广泛应用于国防、生物医学、自动驾驶、航空航天及灾后搜救等领域。
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-VKiqoBmp-1691764156628)(<>)]
与传统成像不同,非视域成像将隐藏场景返回的间接信号导入重建算法以实现目标场景的重建。然而,由于受到物体深度、探测器灵敏度、环境光及中继面大小等因素的限制,非视域成像在快速获得高质量图像方面还存在一些挑战。
2. 非视域成像模式
文章中介绍了三种非视域成像模式,包括基于飞行时间的非视域成像、基于相干信息的非视域成像(包括基于散斑图案和空间相干两种方法)、基于强度信息的非视域成像。
2.1 基于飞行时间的非视域成像
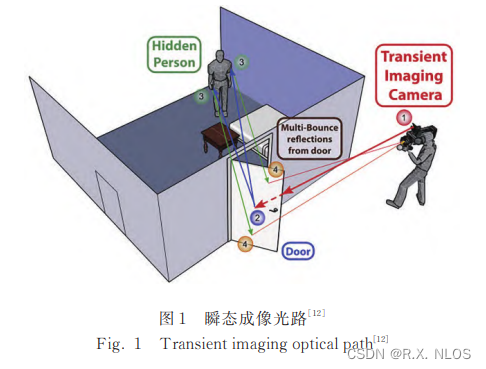
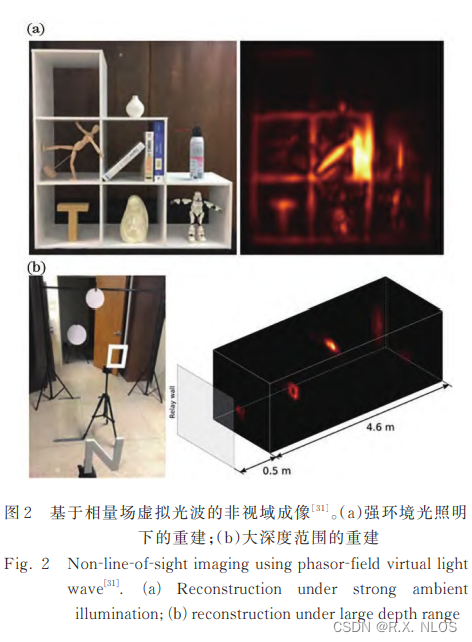
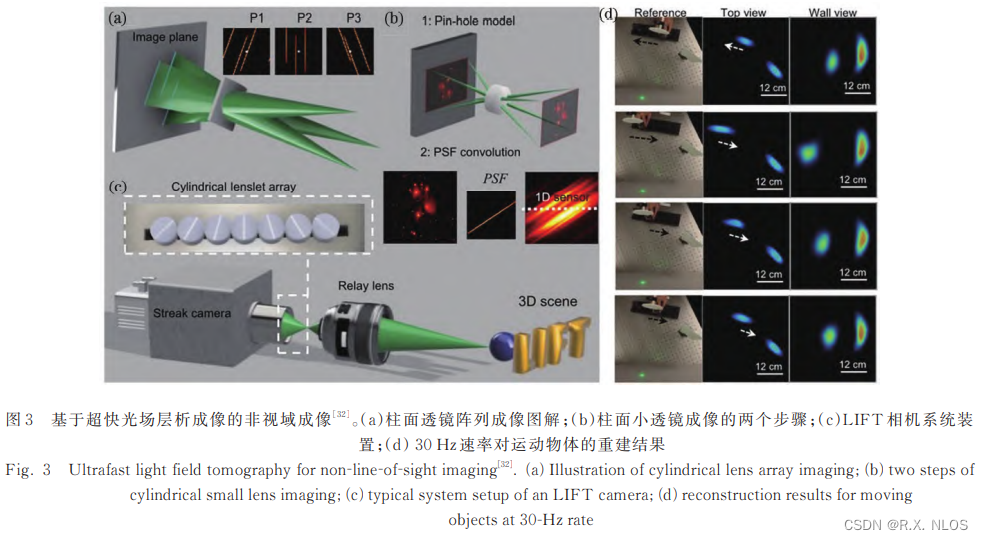
基于飞行时间的非视域成像利用超窄脉冲激光,扫描可视区域的墙面、门或窗等中继面,以它们为媒介使光传播至物体,最终由条纹相机或单光子雪崩二极管等高时间分辨探测器采集自物体返回的飞行时间信号,通过单光子飞行时间和扫描点坐标等信息重建非视域目标表面轮廓。
2.2 基于相干信息的非视域成像
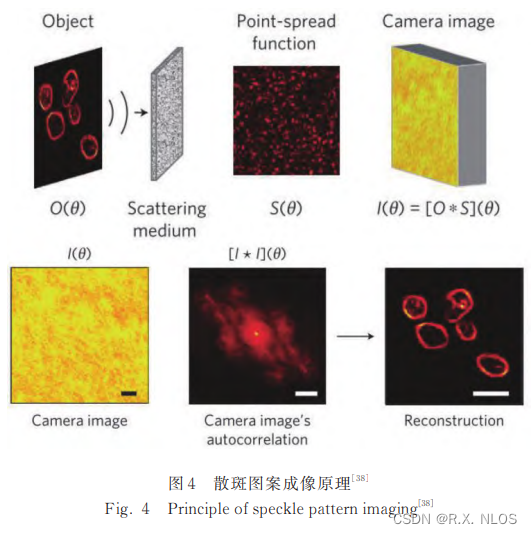
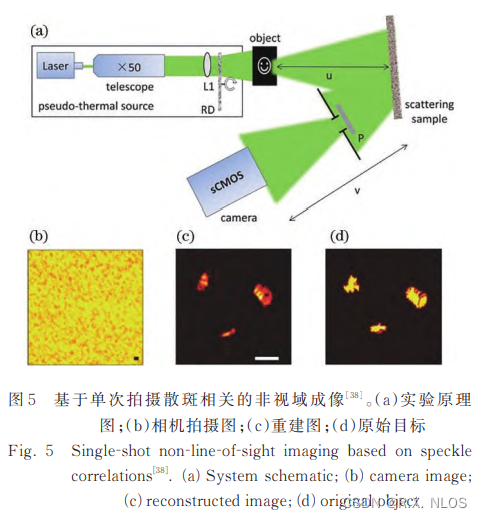
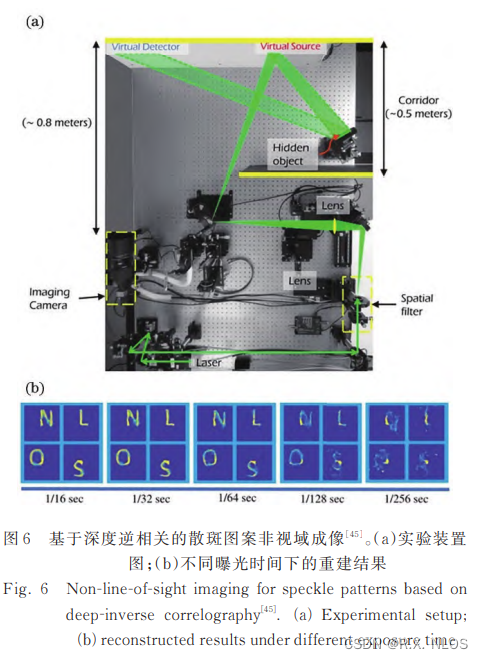
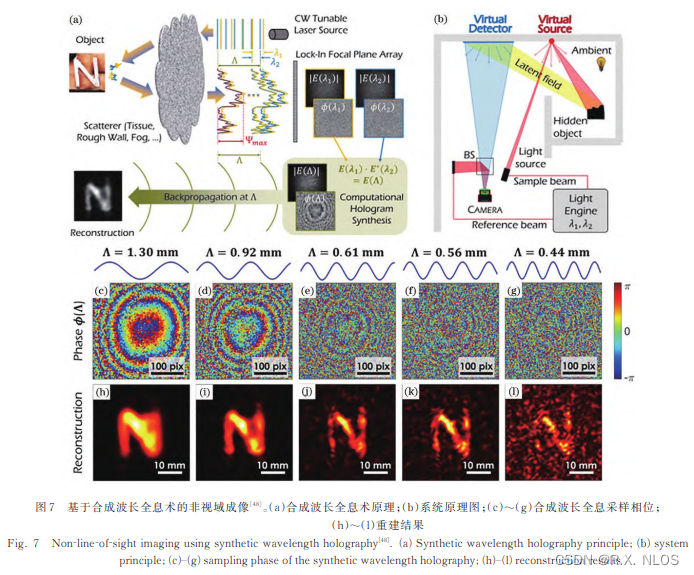
基于相干信息的非视域成像可以分为基于散斑图案和空间相干两类。其中,基于散斑图案的非视域成像使用相机作为探测器,利用散斑图案携带的角度信息来重建图像;而基于空间相干的非视域成像则需要使用干涉仪来探测相位信息以重建图像。
2.3 基于强度信息的非视域成像
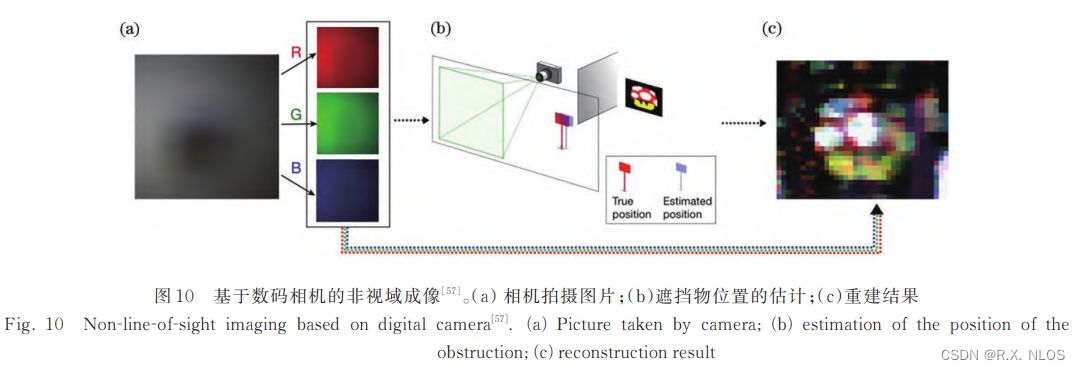
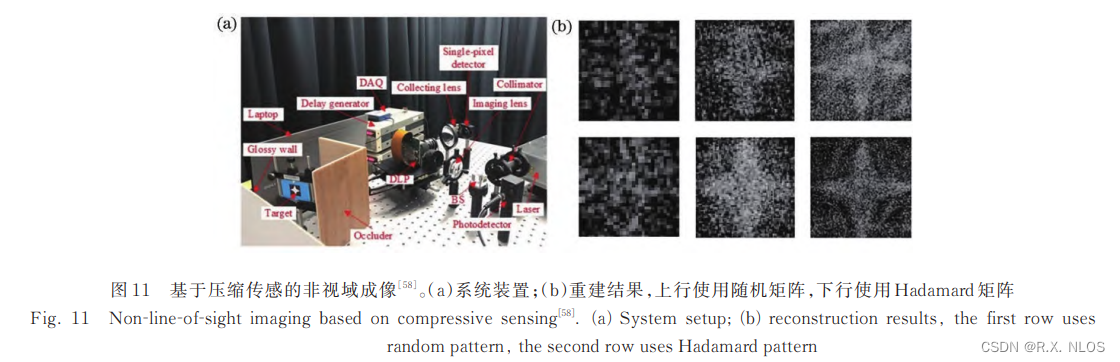
基于强度信息的非视域成像主要有两种成像方法:一种是在非视域空间放置大小和形状已知的遮挡物,使用半影成像技术重建图像;另一种是直接获取非视域场景的光强度信息,将信息导入训练后的模型恢复图像。
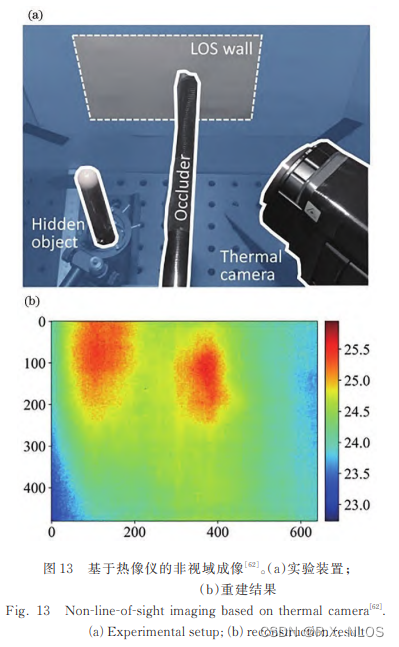
这三种非视域成像模式各有优缺点,针对不同应用场景,可以选择最适合的模式。
3. 非视域成像的挑战与发展趋势
尽管非视域成像技术在过去的几年中取得了显著的进步,但仍然面临许多挑战,包括硬件参数的限制、重建算法的复杂性、重建时间的长短以及图像分辨率的高低等。此外,非视域成像的应用价值受限于物体深度、探测器灵敏度、环境光及中继面大小等因素。
然而,随着技术的进步,非视域成像的发展趋势令人充满期待。例如,随着探测器灵敏度的提高,非视域成像的采集时间和重建质量得以提升。新的重建算法可以提高计算效率并提升非视域成像系统对环境光的鲁棒性。此外,与现有的非视域成像方法结合,或可实现实时高精度非视域追踪。
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-wbMAvEpb-1691764156630)(<>)]
4. 结论
总的来说,非视域成像技术在近年来已取得了显著的进展,尤其是在基于飞行时间、相干信息和强度信息的非视域成像模式方面。然而,要将这些技术应用于实际环境中,仍需解决一些存在的挑战,包括提高探测器的灵敏度、优化重建算法、减少重建时间、提高图像分辨率等。尽管如此,我们仍然充满期待,因为随着技术的不断发展和进步,非视域成像技术的应用前景将更加广阔。
在未来,我们期待非视域成像技术能够在各个领域中发挥重要作用,包括国防、生物医学、自动驾驶、航空航天及灾后搜救等。将来,非视域成像可能会突破人类的视觉限制,让我们能够“看到”更多我们以前无法看到的景象。



![[C语言]深入浅出,带你构建C语言宏观框架](https://img-blog.csdnimg.cn/7b3b2a8dece74c6ab5131ca5de08712a.png)