作者: Herman Ye @Galbot @Auromix
版本: V1.0
测试环境: Ubuntu20.04
更新日期: 2023/08/08
注1: 本文内容中的硬件由 @Galbot 提供支持。
注2: @Auromix 是一个机器人爱好者开源组织。
注3: 本文在更新日期经过测试,确认有效。
Azure Kinect DK使用教程
Azure Kinect DK 是一款开发人员工具包,配有先进的 AI 传感器,提供复杂的计算机视觉和语音模型。 Kinect 将深度传感器、带有视频摄像头的空间麦克风阵列和方向传感器整合成一体式的小型设备,提供多种模式、选项和软件开发工具包 (SDK)。

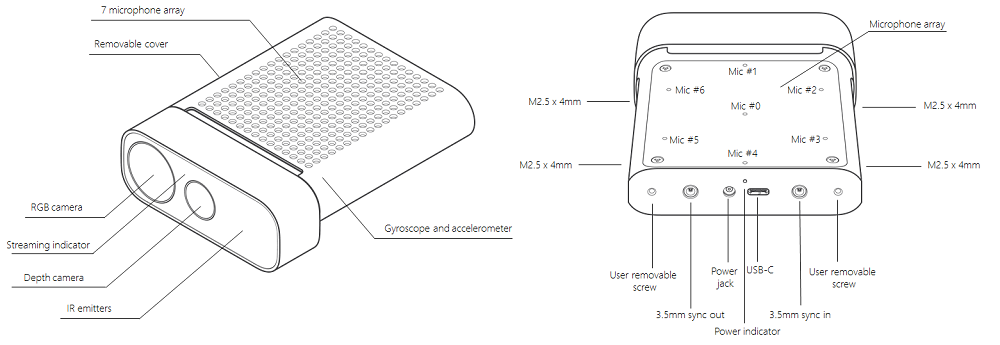
DK的硬件
- RGB相机
Azure Kinect DK 包含 OV12A10 12MP CMOS 滚动快门传感器。 - 深度相机
Azure Kinect DK 集成了 Microsoft 设计的 1 兆像素时差测距 (ToF) 深度相机。 - IMU
嵌入式惯性测量单元 (IMU) 为 LSM6DSMUS,包含加速度传感器和陀螺仪。 加速度传感器和陀螺仪同时按 1.6 kHz 采样。 样本以 208 Hz 的频率报告给主机,可以通过SDK来读取。 - 七麦克风阵列
正六边形x6+中心x1 标准 USB 音频类 2.0 设备的优质七麦克风环形阵列
DK的供电与数据传输
方式1.电源与数据拆分输入线
DK->Type-C转Type-A -> PC
DK->DC5V转Type-A-> PC
方式2.电源和数据合并线
DK->Type-C转Type-C-> PC

一、安装SDK相关软件包
警告: 对于Ubuntu20.04用户,请直接参考安装软件包-> 5.安装k4a-tools->解决方法,不要执行以下步骤。
1.查看系统发行版和版本号
lsb_release -a
结果类似如下:
galbot@ubuntu:~$ lsb_release -a
No LSB modules are available.
Distributor ID: Ubuntu
Description: Ubuntu 20.04.6 LTS
Release: 20.04
Codename: focal
2.配置Microsoft软件包源
下载Microsoft的软件包配置文件,然后将其写入到 /etc/apt/sources.list.d/microsoft-prod.list 文件中,以配置系统以从Microsoft的软件源获取软件更新或安装软件包。
curl -sSL https://packages.microsoft.com/config/<distribution>/<version>/prod.list | sudo tee /etc/apt/sources.list.d/microsoft-prod.list
替换<distribution>和<version>为Distributor ID: Ubuntu和Release: 20.04
示例如下:
curl -sSL https://packages.microsoft.com/config/ubuntu/20.04/prod.list | sudo tee /etc/apt/sources.list.d/microsoft-prod.list
3.配置Microsoft 存储库 GPG 公钥
下载公钥
下载 Microsoft 存储库的 GPG 公钥,然后将其写入到系统的信任 GPG 目录中,以便在之后的软件包验证过程中使用该公钥进行验证,确保下载的软件包的安全性和真实性。
/etc/apt/trusted.gpg.d/microsoft.asc: 是要写入数据的目标文件。它作为系统的信任 GPG 目录中的一个文件,存放了信任的 GPG 公钥。
curl -sSL https://packages.microsoft.com/keys/microsoft.asc | sudo tee /etc/apt/trusted.gpg.d/microsoft.asc
注册、安装、删除认证相关软件包
注意: 需要先下载packages-microsoft-prod.deb ,可能是Microsoft安全认证相关包,官方未提及。
wget https://packages.microsoft.com/config/ubuntu/20.04/packages-microsoft-prod.deb
安装Microsoft安全认证相关包
sudo dpkg -i packages-microsoft-prod.deb
安装后删除安装包文件以释放磁盘空间
rm packages-microsoft-prod.deb
4.更新包索引
sudo apt update
现在,Microsoft 相关产品包能够通过sudo apt install <microsoft_package_name>正确安装。
5.安装k4a-tools
k4a-tools 包中包含 Azure Kinect查看器、Azure Kinect 录制器和 Azure Kinect 固件工具
sudo apt install k4a-tools -y
报错
galbot@ubuntu:~$ sudo apt install k4a-tools
Reading package lists... Done
Building dependency tree
Reading state information... Done
E: Unable to locate package k4a-tools
其他用户提出的相关Issue:Unable to install k4a-tools in Ubuntu 20.04
该问题于2020年8月24日提出,2023年8月8日仍未得到解决,原因是SDK包在2023年8月8日只支持Ubuntu18.04。
根据另一个用户提出的Issue中的解决办法,该用户于2020年10月17日提出该方法,但具体的方法已有部分过时失效不可用,通过参考该用户的思路,重新提出解决方法如下。
解决方法
对于Ubuntu20.04用户,解决方式及注释如下:
清除旧配置
如果不幸已经按照微软官方提供的Ubuntu20.04 SDK安装方法来配置了,需要先清理相关资源。
- 删除sources.list中有关Microsoft的内容
# Delete microsoft related line
sudo nano /etc/apt/sources.list
- 删除packages-microsoft-prod
# remove packages-microsoft-prod
sudo apt remove packages-microsoft-prod
- 删除sources.list.d中有关Microsoft的内容
# remove old 20.04 microsoft-prob.list
sudo rm /etc/apt/sources.list.d/microsoft-prod.list
sudo rm /etc/apt/sources.list.d/microsoft-prod.list.save
执行新配置
如果已经清除了旧配置或者在警告提示下直接跳到了这一步,按照以下内容进行安装:
通过模拟18.04的软件下载源来欺骗Ubuntu20.04使用18.04的文件,同时指定了较老的版本以避免最新的传感器依赖等问题影响基础使用,比如Azure Kinect ROS 驱动程序需要 v1.3.0 版本的 Azure Kinect Sensor SDK 才能编译。
# Download key and add to system key list
curl -sSL https://packages.microsoft.com/keys/microsoft.asc | sudo apt-key add -# Add Microsoft Ubuntu18.04 packages list to source
curl -sSL https://packages.microsoft.com/config/ubuntu/18.04/prod.list | sudo tee /etc/apt/sources.list.d/microsoft-prod.list# Update software source
sudo apt update# Upgrade software
sudo apt upgrade# Install package of Microsoft
sudo apt install libk4a1.3-dev -y
sudo apt install libk4abt1.0-dev -y
sudo apt install k4a-tools=1.3.0 -y
注意: 另一种可行的方式是直接手动下载微软源的文件,进行deb手动安装。因为微软服务器23.99.120.248虽然在亚东,但使用魔法似乎速度还是很慢,暂时不清楚原因,如果下载时间过长时建议手动,同时选择老版本的软件。
需要下载的文件如下:
libk4abt1.1-dev
libk4a1.4-dev
k4a-tools
对于ARM架构设备
libk4a1.4-dev ARM
二、设置Udev规则
- 新建udev规则
sudo nano /etc/udev/rules.d/99-k4a.rules
- 写入udev规则内容
# Bus 002 Device 116: ID 045e:097a Microsoft Corp. - Generic Superspeed USB Hub
# Bus 001 Device 015: ID 045e:097b Microsoft Corp. - Generic USB Hub
# Bus 002 Device 118: ID 045e:097c Microsoft Corp. - Azure Kinect Depth Camera
# Bus 002 Device 117: ID 045e:097d Microsoft Corp. - Azure Kinect 4K Camera
# Bus 001 Device 016: ID 045e:097e Microsoft Corp. - Azure Kinect Microphone ArrayBUS!="usb", ACTION!="add", SUBSYSTEM!=="usb_device", GOTO="k4a_logic_rules_end"ATTRS{idVendor}=="045e", ATTRS{idProduct}=="097a", MODE="0666", GROUP="plugdev"
ATTRS{idVendor}=="045e", ATTRS{idProduct}=="097b", MODE="0666", GROUP="plugdev"
ATTRS{idVendor}=="045e", ATTRS{idProduct}=="097c", MODE="0666", GROUP="plugdev"
ATTRS{idVendor}=="045e", ATTRS{idProduct}=="097d", MODE="0666", GROUP="plugdev"
ATTRS{idVendor}=="045e", ATTRS{idProduct}=="097e", MODE="0666", GROUP="plugdev"LABEL="k4a_logic_rules_end"
- 重启udev服务
sudo service udev restart
- 设置用户组权限
sudo usermod -aG plugdev $USER
- 重启设备
拔出设备USB线,重新插入。
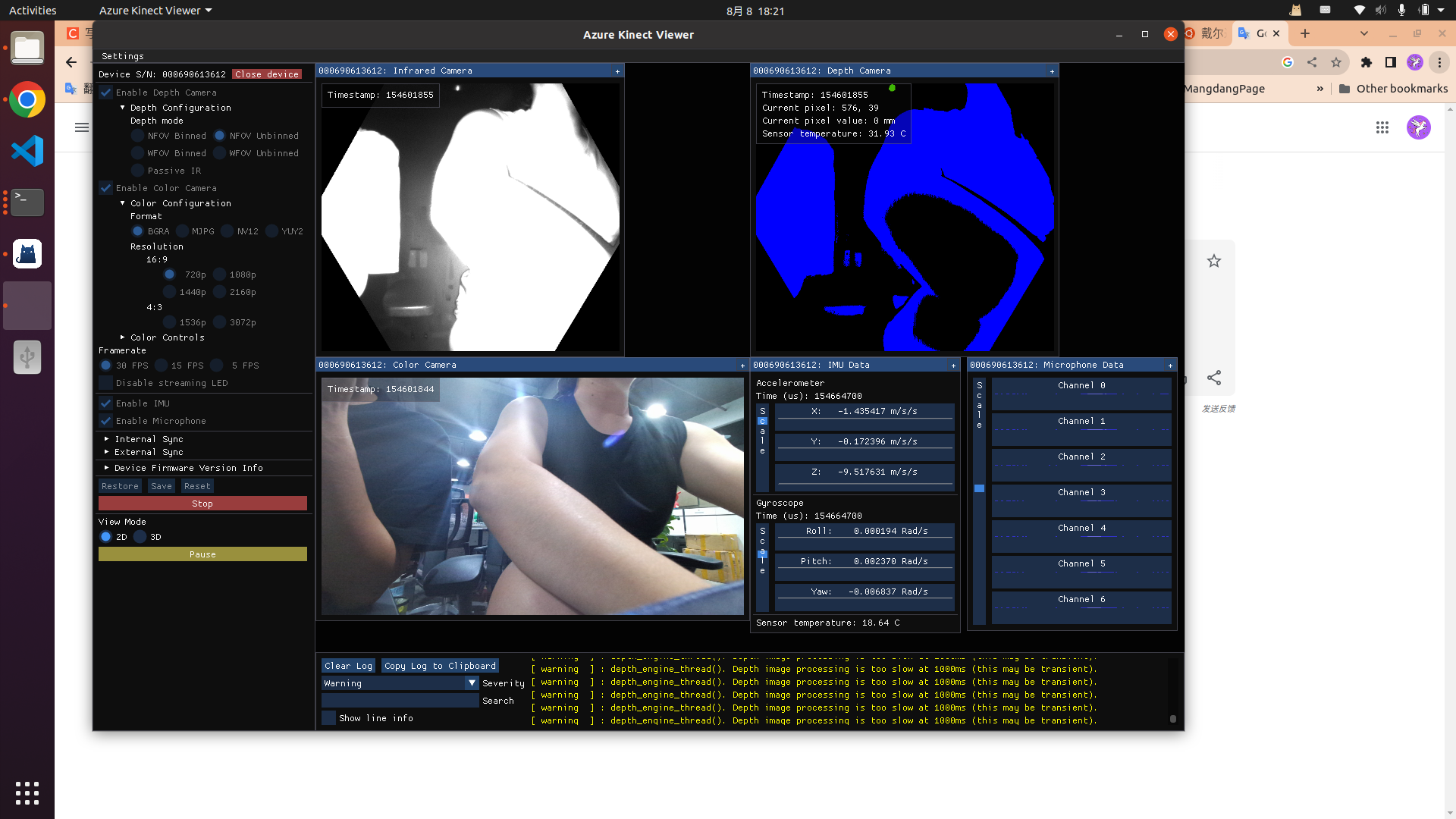
三、SDK基本测试
通过官方k4aviewer确认红外图、深度图、色彩图、麦克风阵列、IMU功能正常。
# Open a new terminal
k4aviewer
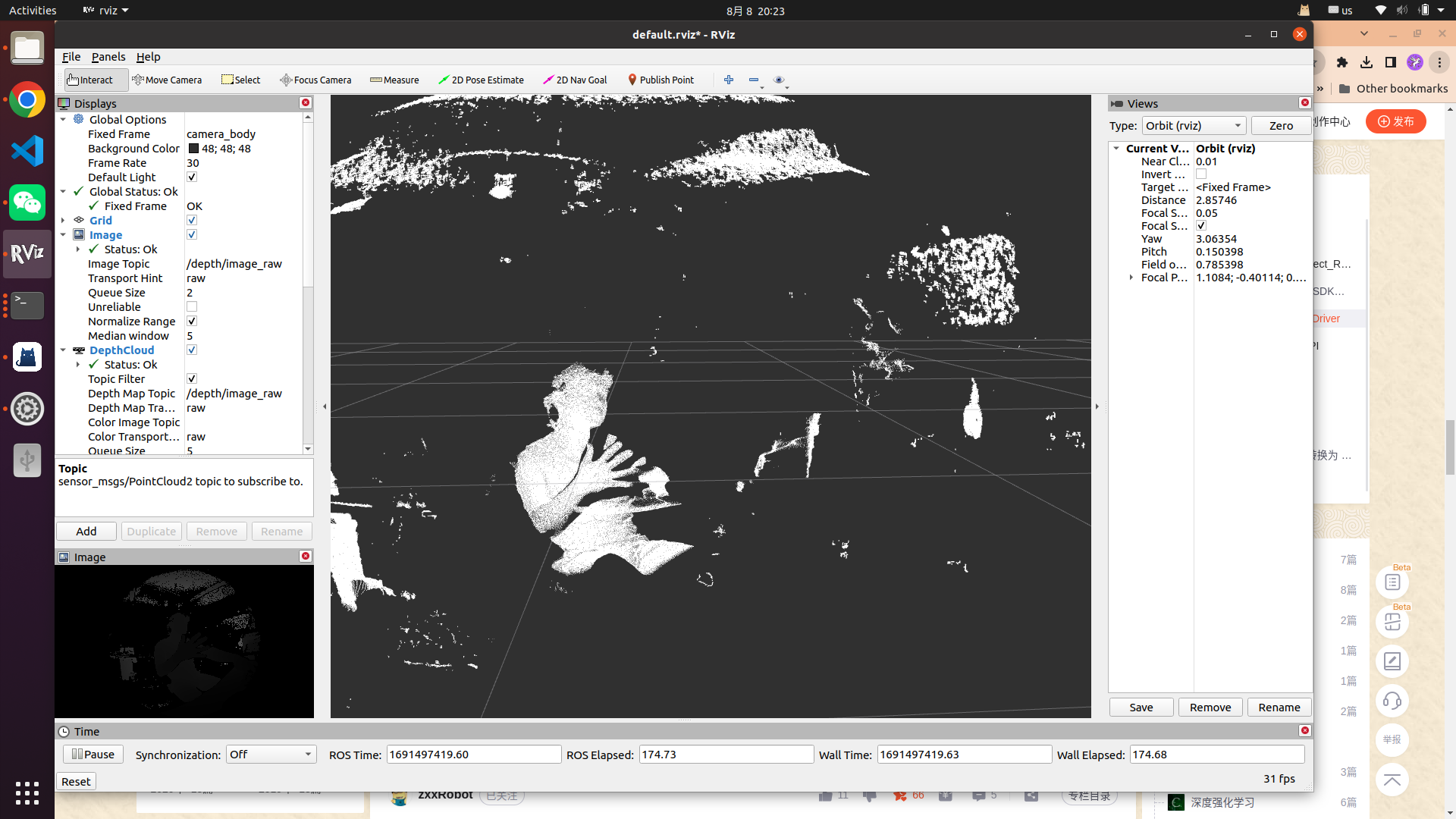
四、DK ROS基本测试
注意: 此处默认ROS1 Noetic已被正确安装并配置,如果还没有安装ROS1,请参考ROS1 Noetic一键安装脚本
- 下载、依赖安装、编译、配置
mkdir -p galbot_ws/src
cd galbot_ws/src
git clone https://github.com/microsoft/Azure_Kinect_ROS_Driver.git
cd ..
rosdep install --from-paths src --ignore-src -r -y
catkin_make
echo "source ~/galbot_ws/devel/setup.bash" >> ~/.bashrc
source ~/.bashrc
- 运行
# Terminal 1
roslaunch azure_kinect_ros_driver driver.launch
# Terminal 2
rviz
添加DK可发布的话题数据在RViz中进行可视化如下:
五、重要的缺陷
- SDK默认不支持Ubuntu20.04、Ubuntu22.04
- Azure Kinect ROS Driver不支持自身的麦克风阵列
- Azure Kinect ROS Driver官方默认只支持ROS1 Melodic
- 不使用直插而使用USB拓展坞可能会造成ROS启动问题
六、参考文献
官方
DK official docs
DK official docs 中文
Azure Kinect Sensor SDK Github
Sensor SDK官方下载
Sensor SDK API文档
Sensor SDK示例代码
Sensor SDK示例代码2
更新DK固件
SDK安装文档及对应版本固件下载
Azure Kinect ROS Driver
麦克风使用参考
语音服务案例
DK 硬件规格书
麦克风硬件规格书部分
第三方
image_proc
setup-azure-kinect-on-jetson-x-nx_18.04
Azure Kinect SDK 及 ROS 驱动安装
Azure Kinect DK Python封装