文章目录
- 前言
- 一、任务优先级
- 1.Tick
- 2.修改任务优先级
- 总结
前言
本系列基于stm32系列单片机来使用freerots
任务管理是实时操作系统(RTOS)的核心功能之一,它允许开发者以并发的方式组织和管理多个任务。FreeRTOS 是一个流行的开源RTOS,它提供了强大的任务管理功能,让开发者能够轻松创建和控制任务。本文将介绍 FreeRTOS 的任务管理功能,包括任务的创建、删除、挂起、恢复和优先级控制等方面的内容。
一、任务优先级
想象一下你在等候一个重要电话,同时又有其他事情要处理,比如看电视、吃饭或打扫房间。这时候,你可能会根据电话的重要性来决定优先处理的事情。
在计算机中,“优先级”是用来决定任务执行顺序的一个指标。就像你有很多事情要做,计算机也有很多任务要处理,比如读取数据、计算、响应用户操作等等。但是,由于计算机资源有限,它不可能同时处理所有任务。于是,我们可以将任务设置优先级,告诉计算机哪些任务更重要或更紧急。
比如说,你有两个任务,一个是检测火灾的传感器,另一个是播放音乐的任务。显然,当火灾传感器检测到火情时,它的任务优先级应该更高,因为这是一个紧急的情况,需要立即处理。而播放音乐的任务优先级相对较低,它不是那么紧急,可以稍后再处理。
通过设置任务的优先级,计算机可以根据任务的重要性来分配处理时间。高优先级的任务会被优先执行,确保重要任务能够及时完成。而低优先级的任务则会在高优先级任务得到处理之后再执行,以避免重要任务被延迟。
总之,优先级就是一种设置任务相对重要性的方式,让计算机可以根据任务的优先级来合理地分配处理时间,确保重要任务得到优先处理。
优先级的取值范围是:0~(configMAX_PRIORITIES – 1),数值越大优先级越高。
FreeRTOS的调度器可以使用2种方法来快速找出优先级最高的、可以运行的任务。使用不同的方法时,
configMAX_PRIORITIES 的取值有所不同。
通用方法
使用C函数实现,对所有的架构都是同样的代码。对configMAX_PRIORITIES的取值没有限制。但
是configMAX_PRIORITIES的取值还是尽量小,因为取值越大越浪费内存,也浪费时间。
configUSE_PORT_OPTIMISED_TASK_SELECTION被定义为0、或者未定义时,使用此方法。
架构相关的优化的方法
架构相关的汇编指令,可以从一个32位的数里快速地找出为1的最高位。使用这些指令,可以快速
找出优先级最高的、可以运行的任务。
使用这种方法时,configMAX_PRIORITIES的取值不能超过32。
configUSE_PORT_OPTIMISED_TASK_SELECTION被定义为1时,使用此方法。
在学习调度方法之前,你只要初略地知道:
FreeRTOS会确保最高优先级的、可运行的任务,马上就能执行
对于相同优先级的、可运行的任务,轮流执行
这无需记忆,就像我们举的例子:
厨房着火了,当然优先灭火
喂饭、回复信息同样重要,轮流做。
1.Tick
对于同优先级的任务,它们“轮流”执行。怎么轮流?你执行一会,我执行一会。
"一会"怎么定义?
人有心跳,心跳间隔基本恒定。
FreeRTOS中也有心跳,它使用定时器产生固定间隔的中断。这叫Tick、滴答,比如每10ms发生一次时
钟中断。
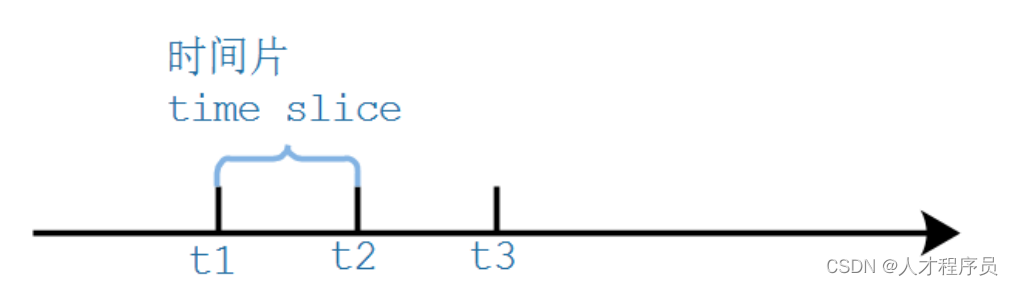
如下图:
假设t1、t2、t3发生时钟中断
两次中断之间的时间被称为时间片(time slice、tick period)
时间片的长度由configTICK_RATE_HZ 决定,假设configTICK_RATE_HZ为100,那么时间片长度就
是10ms
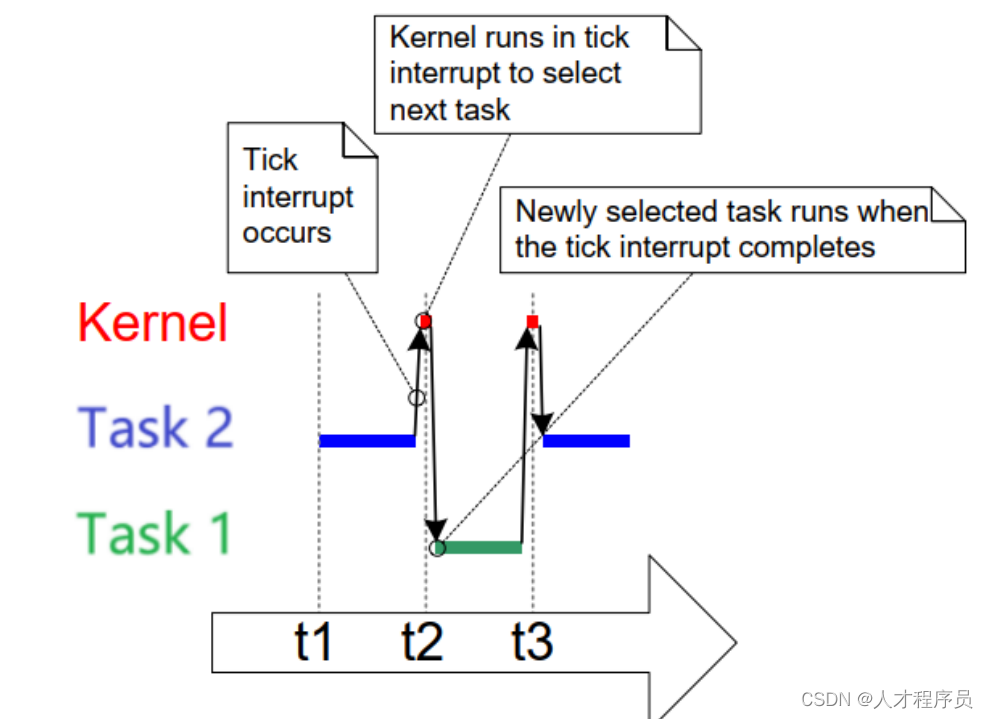
相同优先级的任务怎么切换呢?请看下图:
任务2从t1执行到t2
在t2发生tick中断,进入tick中断处理函数:
选择下一个要运行的任务
执行完中断处理函数后,切换到新的任务:任务1
任务1从t2执行到t3
从图中可以看出,任务运行的时间并不是严格从t1,t2,t3哪里开始。
有了Tick的概念后,我们就可以使用Tick来衡量时间了,比如:
vTaskDelay(2); // 等待2个Tick,假设configTICK_RATE_HZ=100, Tick周期时10ms, 等待20ms
// 还可以使用pdMS_TO_TICKS宏把ms转换为tick
vTaskDelay(pdMS_TO_TICKS(100)); // 等待100ms
注意,基于Tick实现的延时并不精确,比如 vTaskDelay(2) 的本意是延迟2个Tick周期,有可能经过1个
Tick多一点就返回了。
注意,基于Tick实现的延时并不精确,比如 vTaskDelay(2) 的本意是延迟2个Tick周期,有可能经过1个
Tick多一点就返回了。
我们可以写出下面的示例代码:
void Task(void *p)
{int32_t *i = (int*)p;while(1){printf("Count:%d\r\n",*i);(*i)++;vTaskDelay(pdMS_TO_TICKS(500));}vTaskDelete(NULL);
}void Task2(void *p)
{while(1){}vTaskDelete(NULL);
}uint32_t count = 0;
TaskHandle_t mytaskHandle;void TaskTest(void)
{xTaskCreate(Task,"MyTask",50,&count,1,&mytaskHandle);xTaskCreate(Task2,"MyTask2",50,&count,3,&mytaskHandle);vTaskStartScheduler();}
MyTask2的优先级高于MyTask,所以会先执行MyTask2,当他执行MyTask2时,没有延时,他就会一直执行,因为没有比他更高优先级的任务了,只有他延时了,才会执行优先级更低的任务,而这里并没有,所以MyTask会一直不执行,就像下面这样,没有任何打印:
所以我们尽量在任务中延时一下,以便其他任务的执行。
2.修改任务优先级
使用uxTaskPriorityGet来获得任务的优先级:
UBaseType_t uxTaskPriorityGet( const TaskHandle_t xTask );//参数为任务句柄
使用vTaskPrioritySet 来设置任务的优先级:
void vTaskPrioritySet( TaskHandle_t xTask,
UBaseType_t uxNewPriority );//参数1:任务句柄,参数2:新的优先级
根据上面的函数分析可得下面的代码:
通过按键更改优先级,在这里我直接用定义好的函数检测:if(key_scan(0) == KEY0_PRES)
如果大家想自己写也可以的!
uint32_t count = 0;
TaskHandle_t mytaskHandle;
TaskHandle_t mytaskHandle2;
void Task(void *p)
{int32_t *i = (int*)p;while(1){printf("Count:%d\r\n",*i);(*i)++;vTaskDelay(pdMS_TO_TICKS(500));}vTaskDelete(NULL);
}void Task2(void *p)
{uint8_t Priority = 1;while(1){if(key_scan(0) == KEY0_PRES){Priority++;vTaskPrioritySet(mytaskHandle,Priority);}vTaskDelay(20);}vTaskDelete(NULL);
}void TaskTest(void)
{xTaskCreate(Task,"MyTask",50,&count,1,&mytaskHandle);xTaskCreate(Task2,"MyTask2",50,&count,3,&mytaskHandle2);vTaskStartScheduler();
}
实验效果:当我们按下按键0,他的优先级会++,在串口里会看到count的数量打印。
总结
任务管理是 FreeRTOS 提供的一个强大功能,它允许开发者以并发的方式组织和管理多个任务。通过任务的创建、删除、挂起、恢复和优先级控制等操作,开发者可以灵活地控制任务的执行顺序和调度策略,从而实现复杂的系统功能。任务通信与同步机制进一步增强了任务的协同工作能力,使任务之间能够高效地共享数据和协调操作。借助 FreeRTOS 提供的任务管理功能,开发者可以更加方便地构建实时嵌入式系统,并具备可靠性和高效性。
需要注意的是,在使用 FreeRTOS 进行任务管理时,开发者需要注意任务的资源管理、优先级设置和调度策略等方面,以确保系统能够稳定地运行,并满足实时性和响应性的要求。