题目:Unifying Lane-Level Traffic Prediction from a Graph Structural Perspective: Benchmark and Baseline
作者:Shuhao Li, Yue Cui, Jingyi Xu, Libin Li, Lingkai Meng, Weidong Yang(杨卫东), Fan Zhang, Xiaofang Zhou(周晓方)
机构:复旦大学,广州大学,上海交通大学,香港科技大学
arXiv网址:https://arxiv.org/abs/2403.14941
Cool Paper:https://papers.cool/arxiv/2403.14941
项目地址:https://github.com/ShuhaoLii/TITS24LaneLevel-Traffic-Benchmark
关键词:车道级别交通预测,基准测试
TL; DR: 本文深入分析了车道级别交通预测面临的挑战,如缺乏统一评估标准、数据和代码的公共可用性有限、高频率和细粒度数据处理以及对实时变化的快速响应等。为了解决这些问题,论文提出了一个统一的拓扑建模方法和预测任务框架,开发了一个基于图结构和多层感知器(MLP)网络的基线模型GraphMLP,并创建了三个多样化数据集。此外,论文还复现了之前未公开的代码,进行了现有模型和新模型的全面、公平的基准测试,并通过实验验证了所提方法的有效性和效率。
🌟【紧跟前沿】“时空探索之旅”与你一起探索时空奥秘!🚀
欢迎大家关注时空探索之旅
Q: 这篇论文试图解决什么问题?
A: 这篇论文试图解决的问题是车道级别交通预测领域中存在的挑战,主要包括以下几个方面:
- 缺乏统一和综合的评估标准:目前车道级别交通预测的研究进展受到限制,部分原因是缺少公认的评估标准和公开可用的数据及代码。
- 数据和代码的公共可用性有限:大多数研究基于私有数据集进行,且相关代码和数据集未公开,这限制了研究方法的比较、验证和进一步改进。
- 高频率和细粒度数据的处理:车道级别交通预测需要处理更高频率和更细粒度的数据,同时考虑车辆间的交互和变道行为,这增加了计算成本和数据收集处理的要求。
- 对实时变化的快速响应:车道级别交通预测对于智能交通系统的设计和实施至关重要,尤其是在自动驾驶技术和车联网(V2X)通信快速发展的背景下。
为了应对这些挑战,论文提出了以下几个主要贡献:
- 全面的文献回顾:对现有车道级别交通预测研究进行了广泛的回顾和分类,强调了它们的优势和局限性。
- 统一的拓扑建模和基线模型:提出了一种统一的拓扑建模方法和预测任务,以及一个简单的基于图结构和多层感知器(MLP)网络的基线模型。
- 多样化数据集的创建:从真实世界的道路网络中提取并公开了三个独特的数据集,包括具有规则和不规则车道配置的数据集。
- 改进的代码复制和公平基准测试:复制了之前未公开的代码,并进行了全面、公平的现有模型和新模型的基准测试,强调了它们的有效性和效率。
通过这些贡献,论文旨在为车道级别交通预测领域建立一个坚实的基础,并为未来的学术和实际工作提供方向。
Q: 有哪些相关研究?
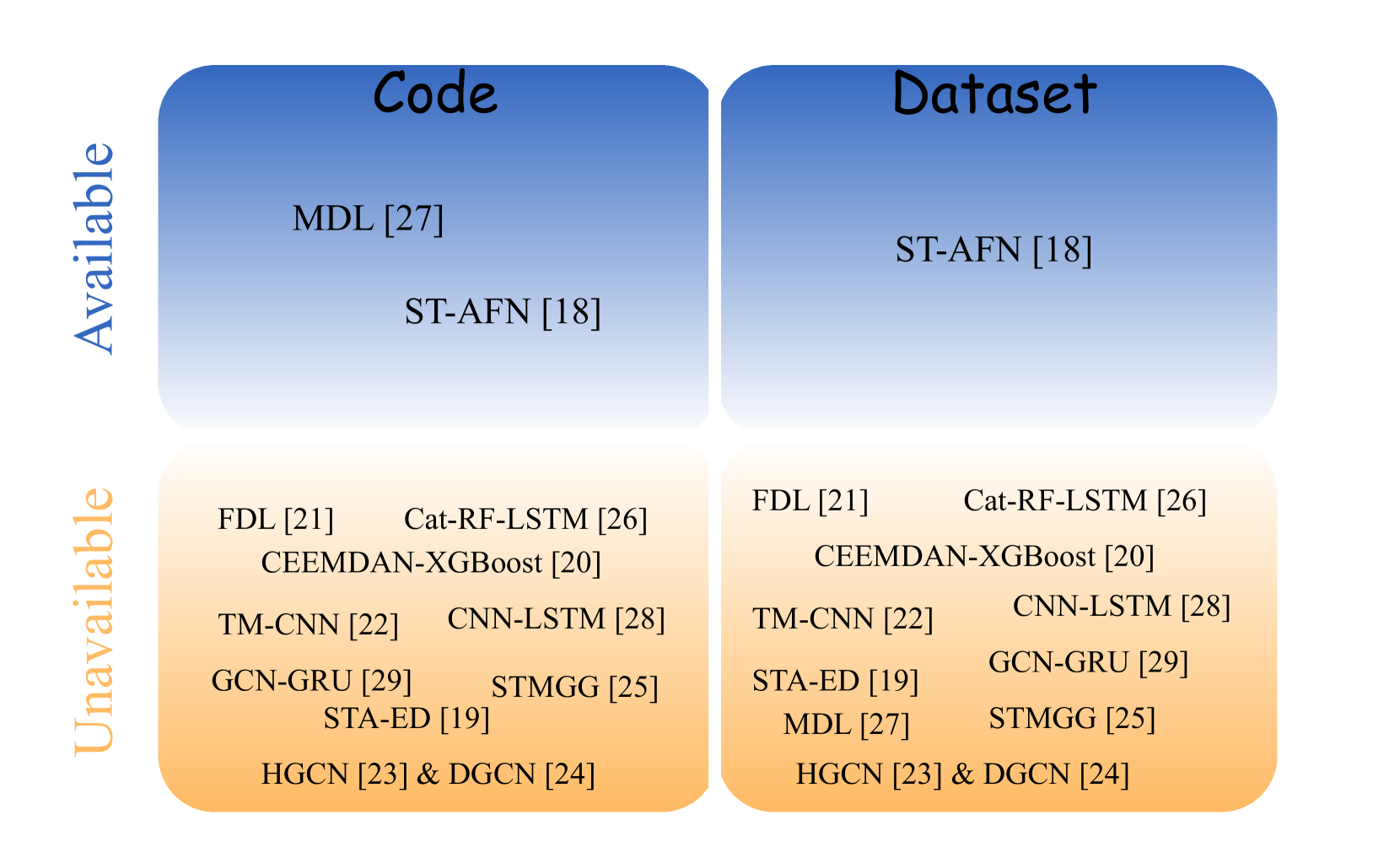
注意:这里的“可用”是指在各自的研究论文中明确提及可访问的代码或数据集 URL
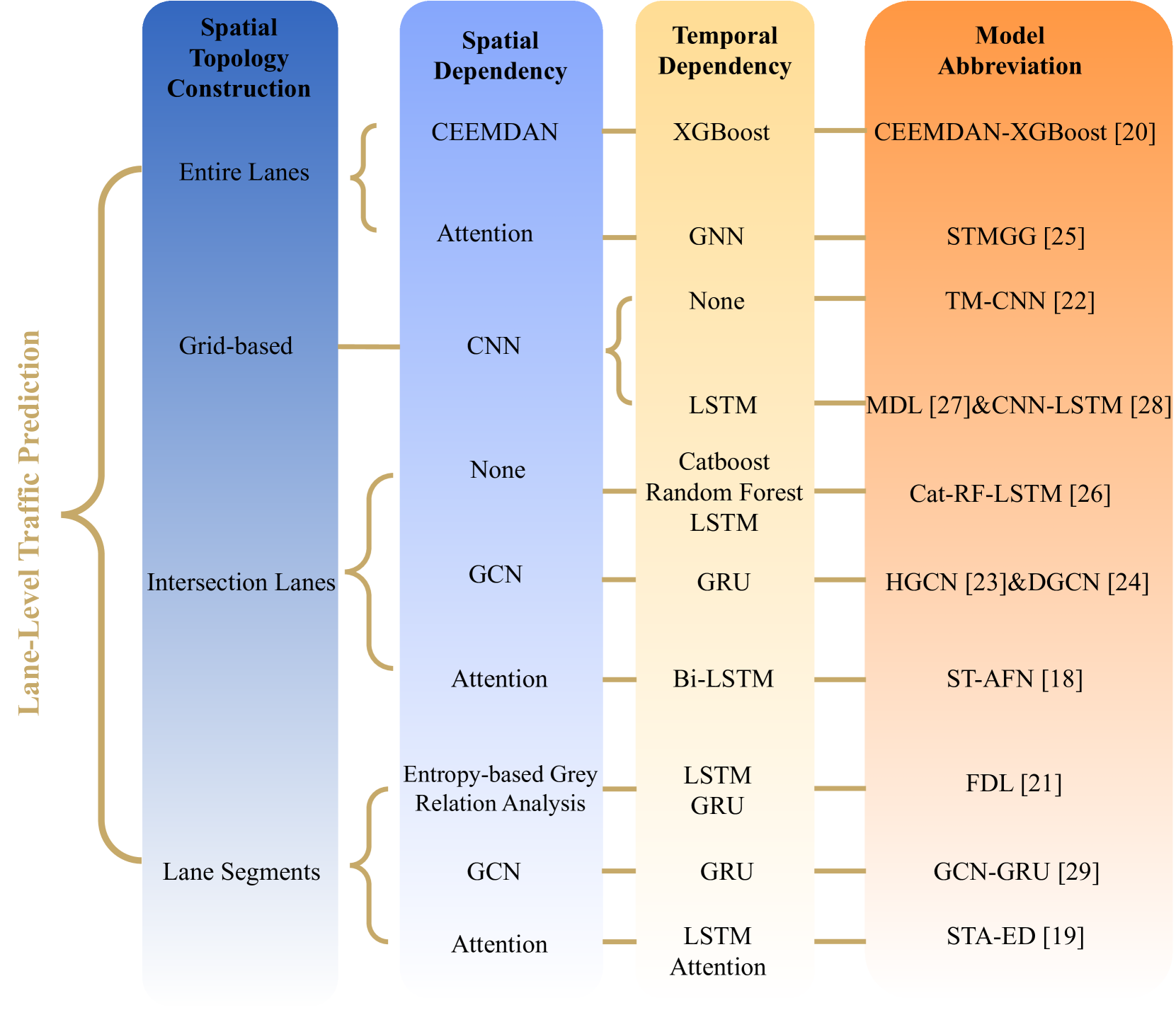
A: 论文中提到了多项与车道级别交通预测相关的研究,这些研究可以基于它们在空间拓扑构建、空间依赖性建模技术和时间依赖性建模技术上的分类。以下是一些相关的研究:
- **CEEMDAN-XGBoost **: 结合了CEEMDAN方法进行数据分解和XGBoost进行预测。
- **Cat-RF-LSTM **: 结合了Catboost、Random Forest和LSTM进行交通流预测。
- FDL: 使用基于熵的灰色关联分析和LSTM/GRU模型进行车道级别预测。
- TM-CNN: 将交通速度和流量数据转换为矩阵进行预测的卷积神经网络。
- MDL: 结合了ConvLSTM、卷积层和密集层的混合深度学习模型。
- CNN-LSTM: 使用CNN进行车道分析以改进短期交通预测的模型。
- HGCN 和 DGCN: 利用图结构和注意力机制进行空间依赖性分析和数据融合的模型。
- GCN-GRU: 结合了基于数据驱动的邻接矩阵的GCN和GRU的模型。
- ST-AFN: 具有速度处理网络、空间编码器和时间解码器的模型,内嵌注意力机制。
- STA-ED [19]: 使用带有两阶段注意力的LSTM编码器-解码器架构的模型。
- STMGG: 利用可见性图、空间拓扑图、基于注意力的门控机制和Seq2Seq进行车道级别交通预测的模型。
此外,论文还提到了一些基于图结构的时空预测模型,如DCRNN 、STGCN、MTGNN、ASTGCN、GraphWaveNet、STSGCN、AGCRN、STGODE和 MegaCRN等。这些模型通常用于交通网络的图结构上,能够有效地捕捉复杂的交通流模式。
Q: 论文如何解决这个问题?
其中路段的长边与相邻路段相邻,短边对应于前后的路段。
A: 为了解决车道级别交通预测中的问题,论文采取了以下几个步骤:
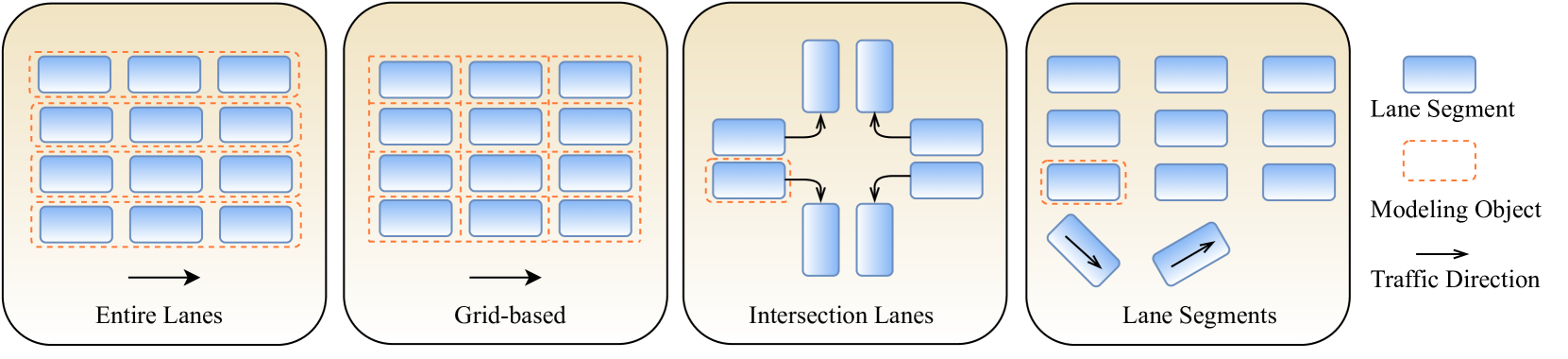
- 综合文献回顾:论文首先对现有的车道级别交通预测研究进行了全面的分类和分析,这有助于识别该领域的研究空白和挑战。
- 统一的空间拓扑结构:论文提出了一个统一的空间拓扑结构和预测任务,这有助于标准化车道级别交通预测的方法和评估标准。
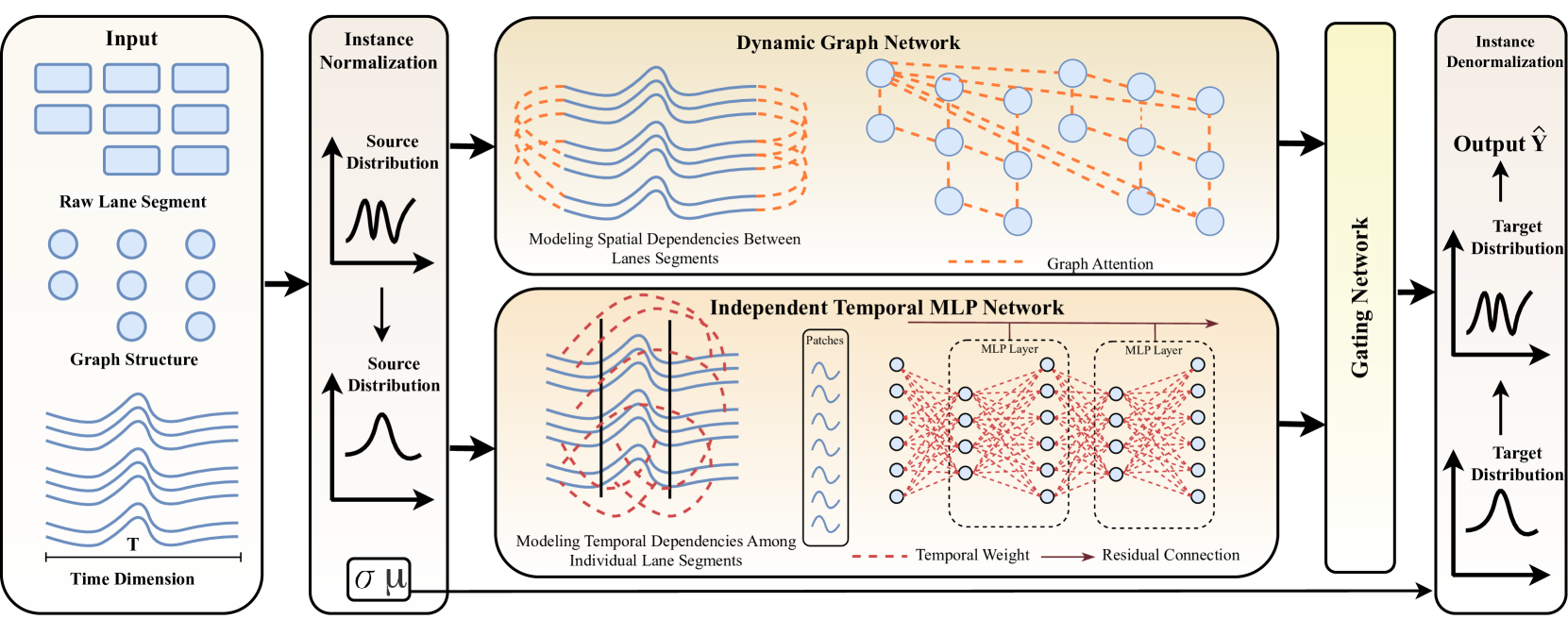
- 基线模型GraphMLP:论文介绍了一个基于图结构和多层感知器(MLP)网络的简单基线模型GraphMLP。这个模型结合了图结构来捕捉空间依赖性,以及MLP网络来处理交通流的非线性特征。
- 数据集的创建和公开:论文发布了三个新的数据集,这些数据集包含了规则和不规则车道配置的真实世界车道网络数据,以及相应的代码,以促进该领域的研究和应用。
- 模型的公平评估:论文复制了之前未公开的研究中的代码,并使用新发布的数据集和训练成本指标对各种模型进行了全面和公正的评估。这不仅包括预测准确性,还包括模型训练的效率。
- 实验和基准测试:论文通过在多个数据集上进行广泛的实验来验证GraphMLP模型的有效性,并与其他现有的车道级别交通预测模型进行了比较。
通过这些步骤,论文旨在为车道级别交通预测提供一个清晰的研究方向,同时为研究人员和从业者提供实用的工具和基准,以推动该领域的发展。
Q: 论文做了哪些实验?
A: 论文中进行了一系列的实验来评估提出的方法和模型,具体包括:
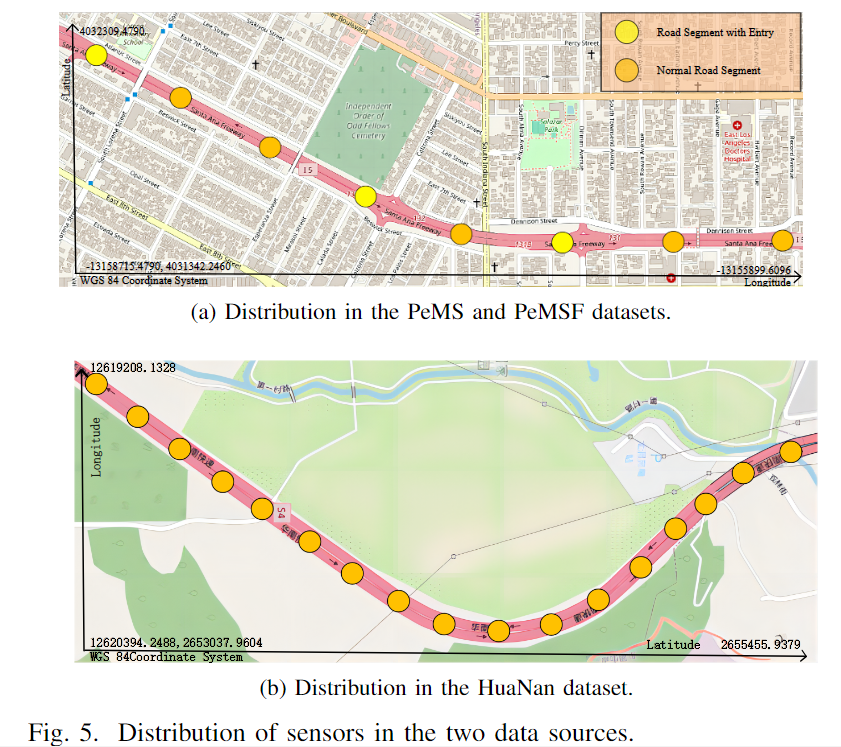
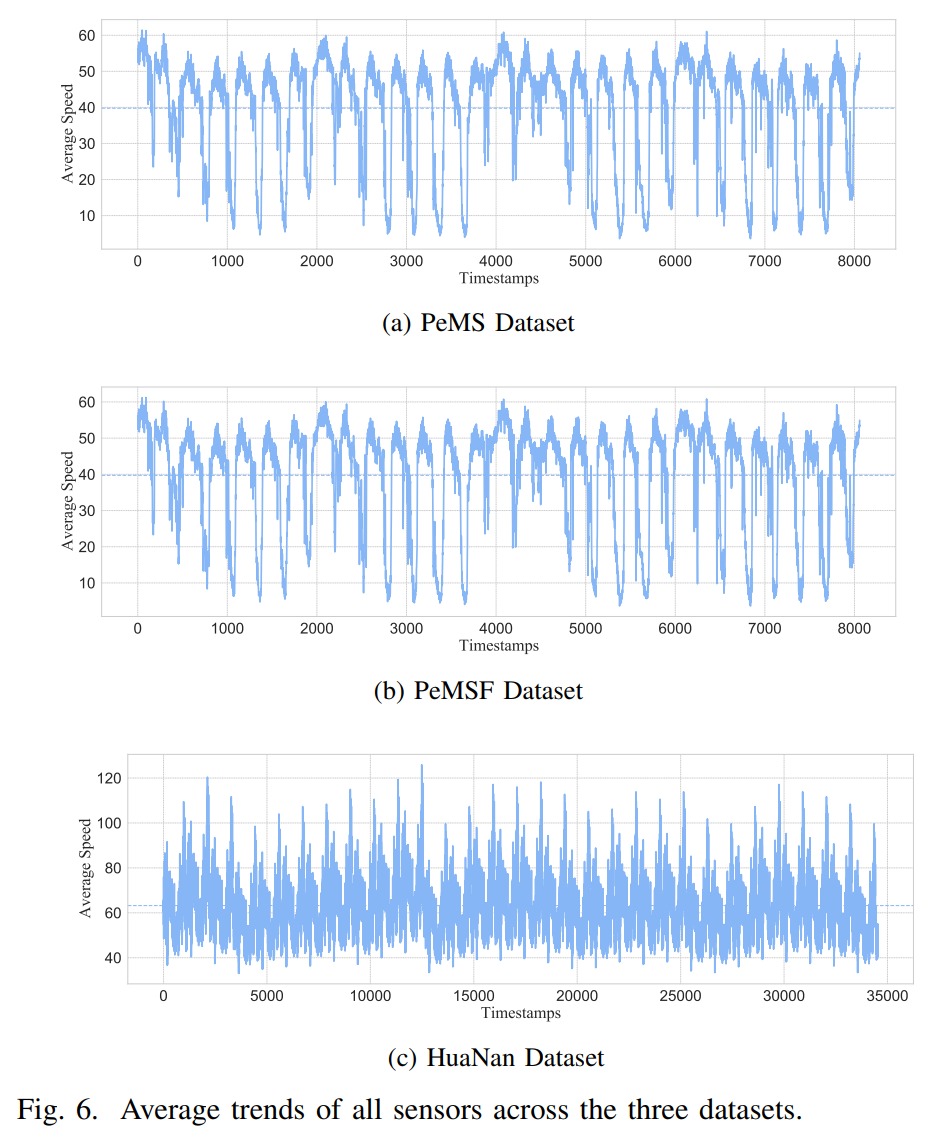
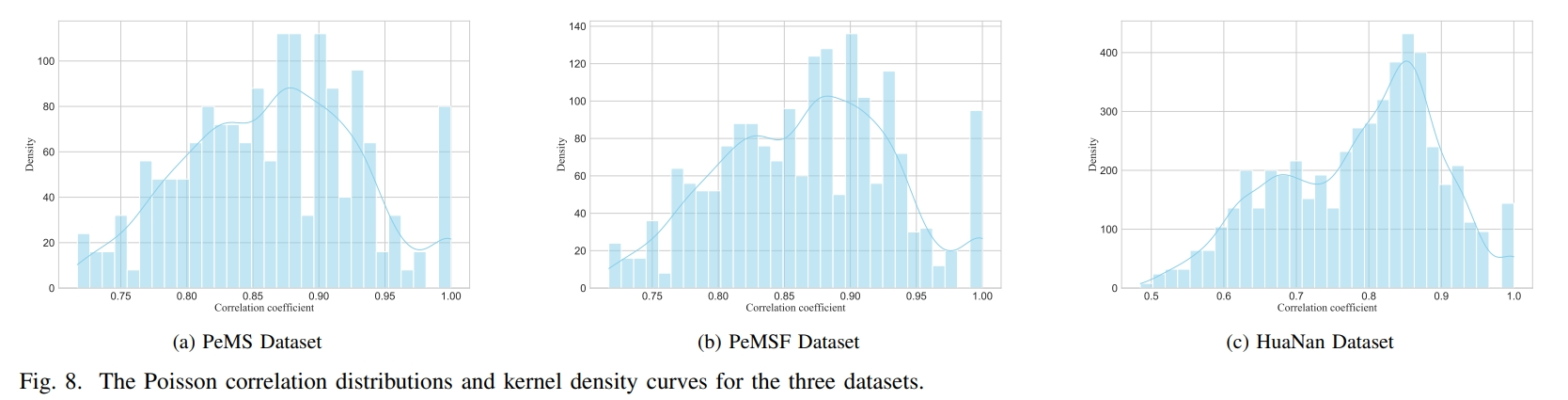
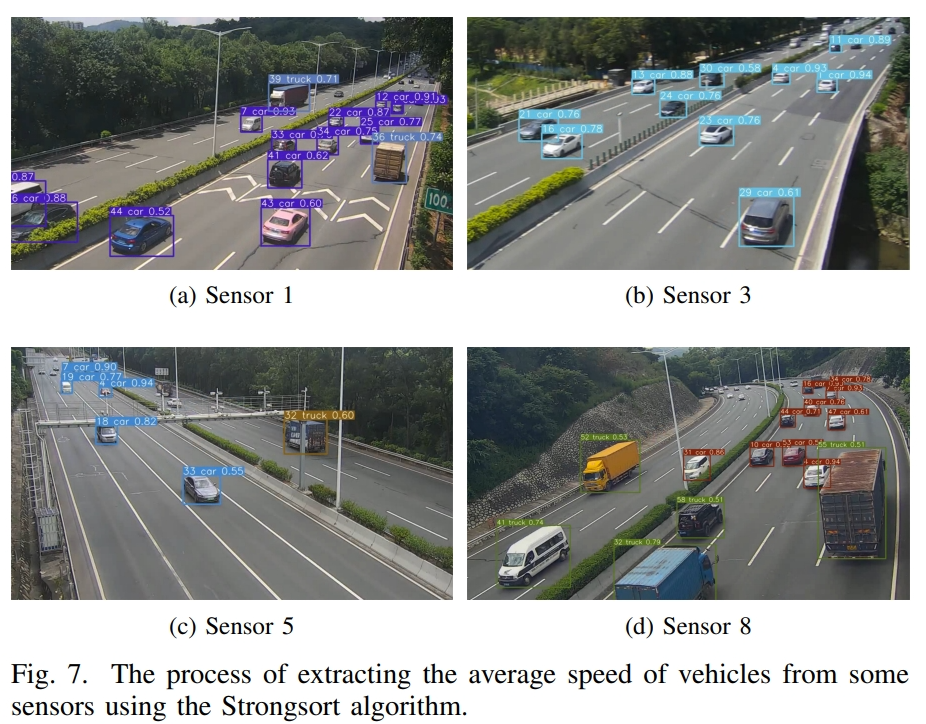
- 数据集准备:基于真实世界的道路网络,提取并创建了三个数据集,包括PeMS和HuaNan数据集,这些数据集涵盖了规则和不规则车道配置的情况。
- 模型训练与评估:使用提出的GraphMLP模型以及现有的多个车道级别交通预测模型在上述数据集上进行训练和测试。这些模型包括基于深度学习的模型、图神经网络模型以及其他基准模型。
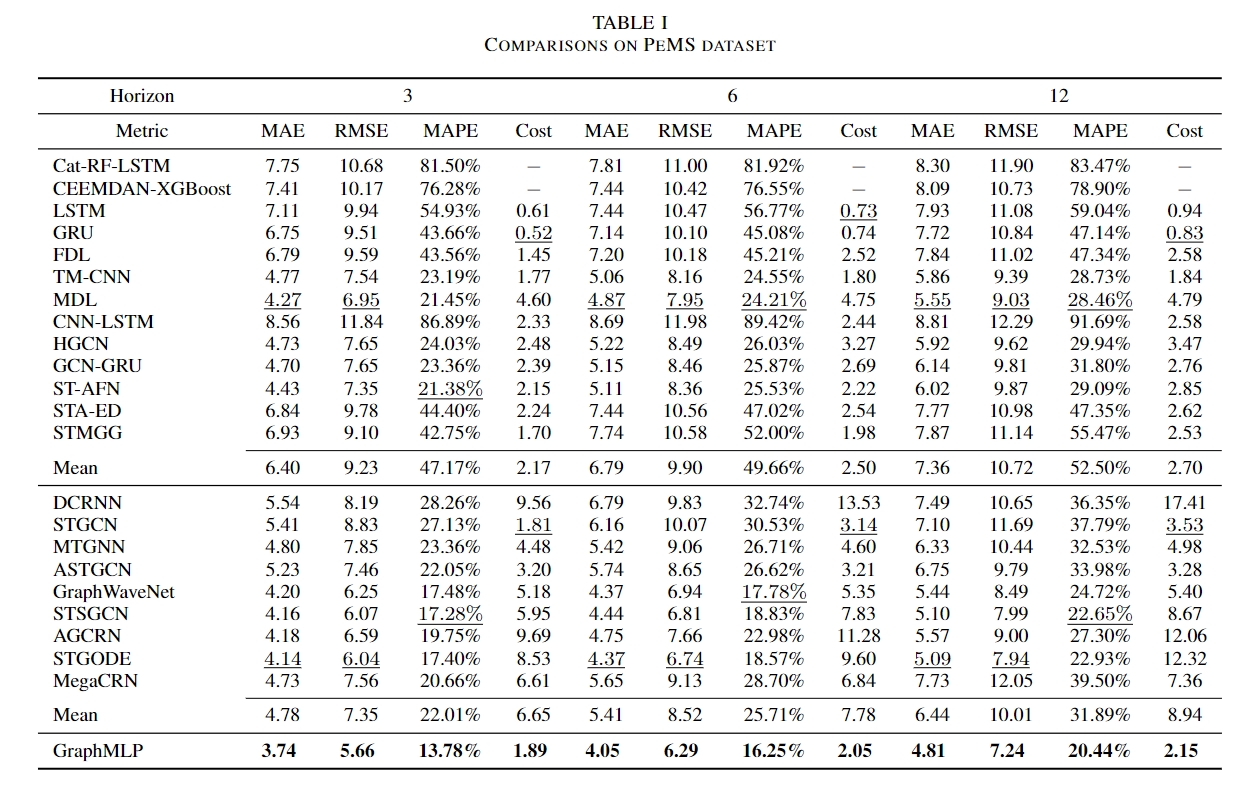
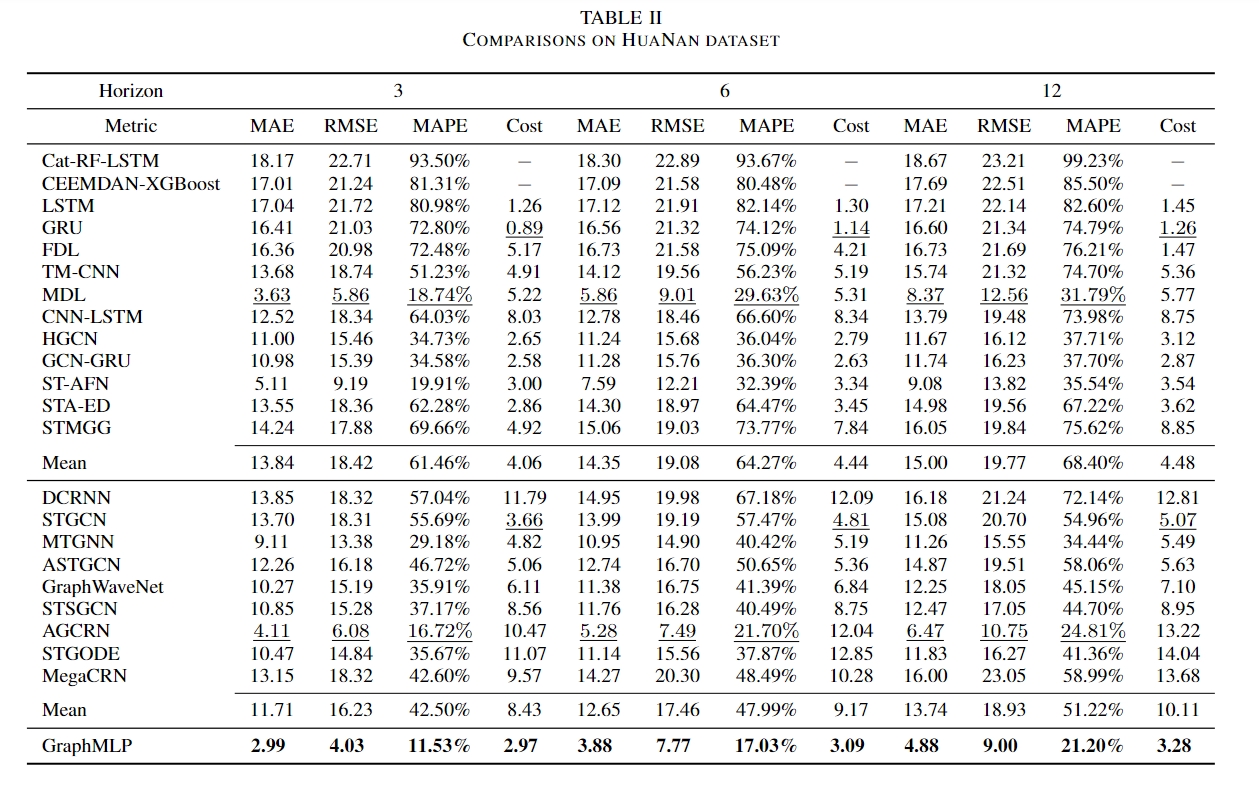
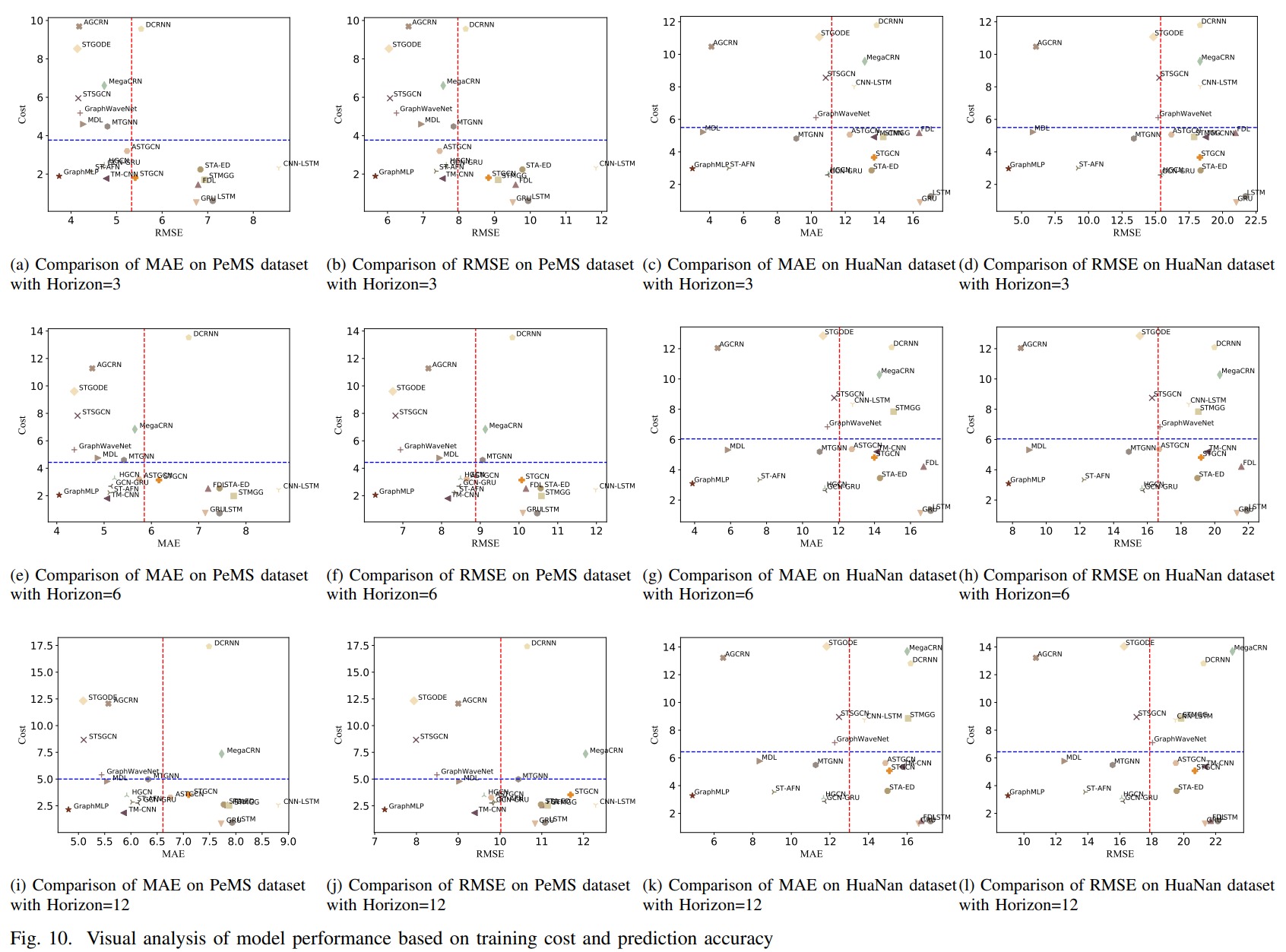
- 性能基准测试:对所有参与比较的模型进行了全面的基准测试,包括对它们的预测准确性(使用MAE、RMSE和MAPE等指标)和训练效率(训练成本)的评估。
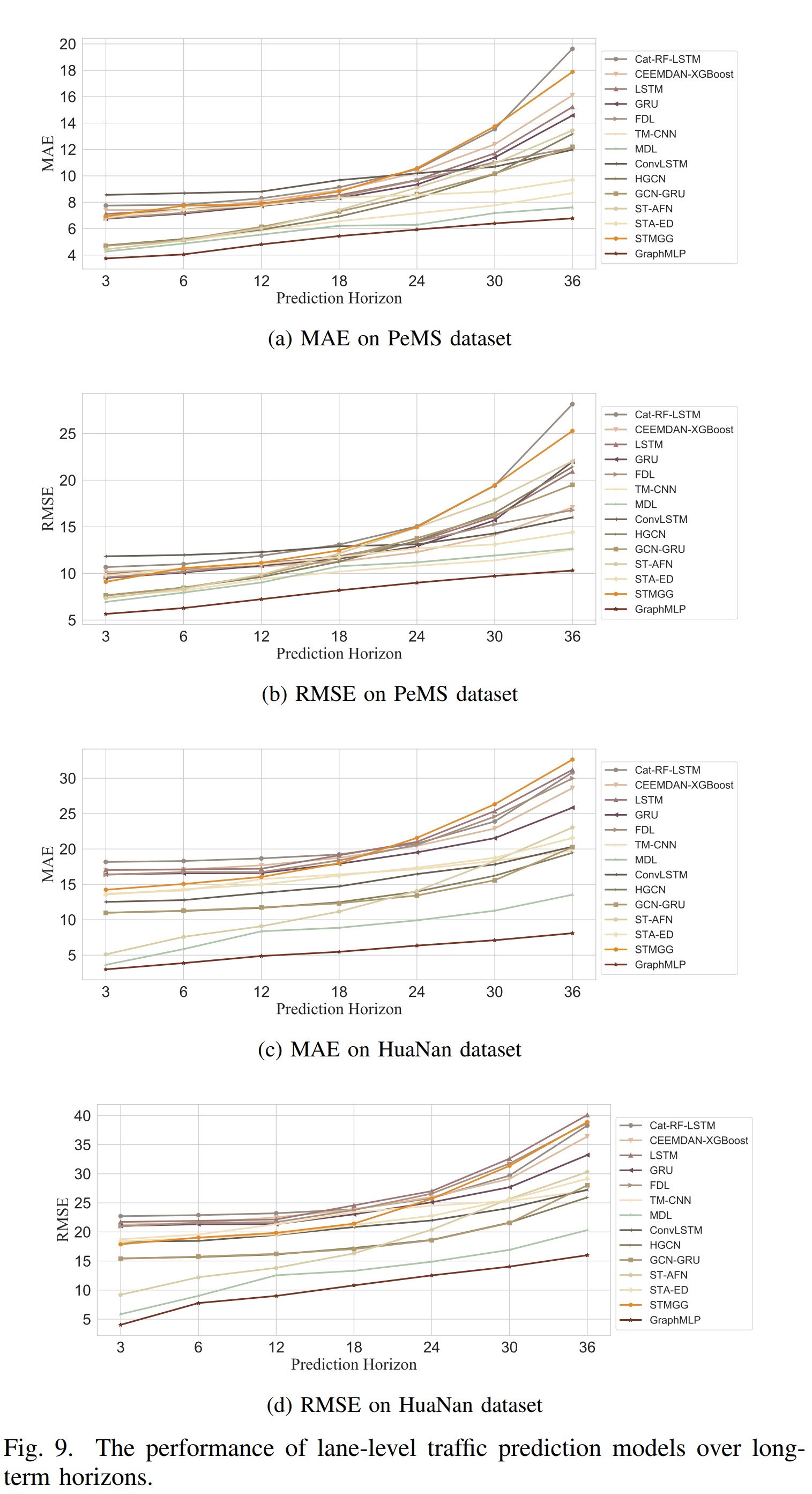
- 长期预测性能:考虑到车道级别交通网络的动态性,论文还对模型在更长预测时间范围内的性能进行了测试,以评估模型在长期预测中的稳定性和准确性。
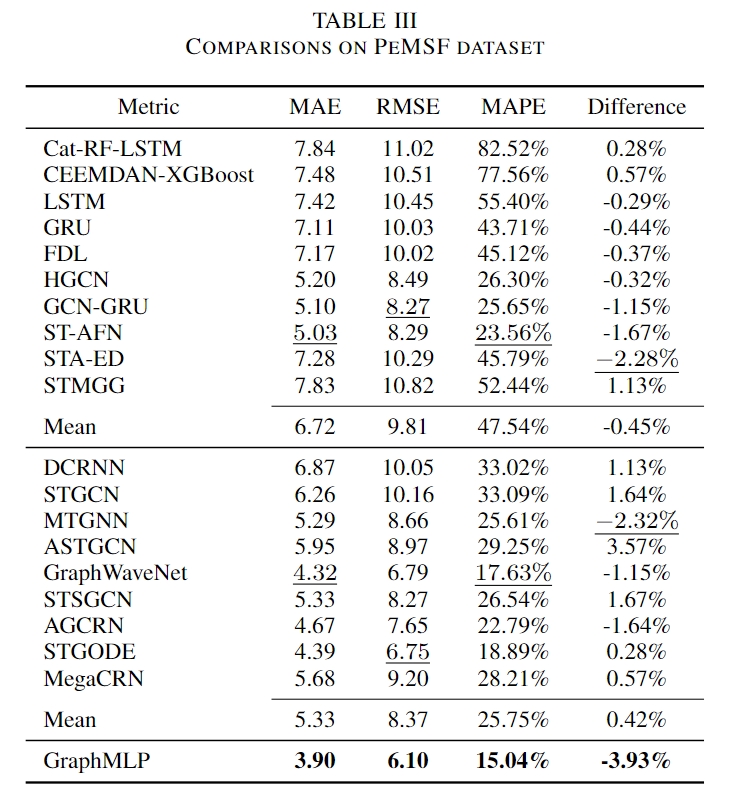
- 不规则车道性能比较:为了评估模型对不规则车道配置的适应性,论文在包含额外入口车道的PeMSF数据集上进行了额外的实验,使用差异度量(Difference metric)来量化不同数据集之间的性能差异。
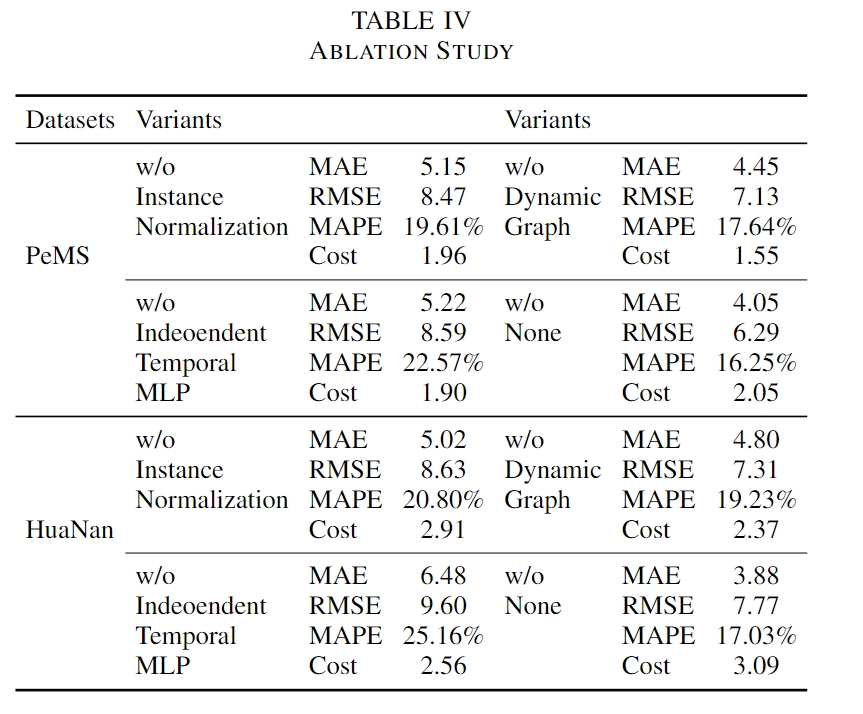
- 消融实验:为了理解GraphMLP模型中各个组件的贡献,论文进行了消融实验,逐一移除模型的各个模块(如实例归一化、动态图网络、独立时间MLP网络等),并观察对预测性能的影响。
通过这些实验,论文全面地评估了提出模型的有效性和效率,并通过与现有模型的比较来展示其优势。此外,论文还公开了数据集和代码,以促进社区的进一步研究和验证。
Q: 总结一下论文的主要内容
A: 这篇论文的主要内容可以总结如下:
- 问题定义:论文识别了车道级别交通预测的重要性,并指出了该领域缺乏统一评估标准和公共数据集的问题。
- 文献回顾:对现有的车道级别交通预测研究进行了全面的回顾和分类,分析了不同模型在空间拓扑构建、空间依赖性建模和时间依赖性建模方面的方法。
- 挑战分析:论文分析了车道级别交通预测面临的挑战,包括高频率数据处理、实时变化响应、复杂交互和变道行为的处理等。
- 方法提出:提出了一个基于图结构的统一空间拓扑结构和这篇论文的主要内容可以总结如下:
- 问题定义:论文识别了车道级别交通预测的重要性,并指出了该领域缺乏统一评估标准和公共数据代码的问题。
- 文献回顾:对现有的车道级别交通预测研究进行了全面的分类和分析,强调了不同研究在空间拓扑构建、空间依赖性建模和时间依赖性建模方面的方法和技术。
- 方法论:提出了一种新的统一空间拓扑结构和预测任务框架,以及一个基于图结构和多层感知器(MLP)网络的简单基线模型GraphMLP。
- 数据集:创建并公开了三个新的数据集,包括具有规则和不规则车道配置的真实世界车道网络数据,以及相应的代码。
- 实验评估:通过在多个数据集上的实验,对GraphMLP模型和其他现有的车道级别交通预测模型进行了全面的比较和基准测试,评估了它们的预测准确性和训练效率。
- 消融实验:进行了消融实验来验证GraphMLP模型中各个组件的有效性。
- 未来方向:论文讨论了车道级别交通预测领域的未来研究方向,包括模型泛化、多模态数据融合、可解释性、异常检测等。
试,评估了它们的预测准确性和训练效率。 - 消融实验:进行了消融实验来验证GraphMLP模型中各个组件的有效性。
- 未来方向:论文讨论了车道级别交通预测领域的未来研究方向,包括模型泛化、多模态数据融合、可解释性、异常检测等。
- 贡献:论文的主要贡献在于为车道级别交通预测建立了一个坚实的研究基础,提供了新的数据集和工具,并推动了该领域的进一步发展。
🌟【紧跟前沿】“时空探索之旅”与你一起探索时空奥秘!🚀
欢迎大家关注时空探索之旅