1、 自动驾驶——数据驱动下的算法迭代
1.1、 自动驾驶算法是感知、预测、规划、控制的结合体
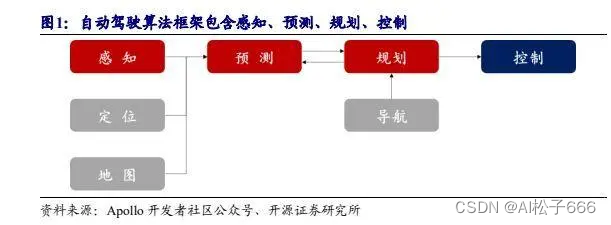
自动驾驶算法反应了工程师们根据人的思维模式,对自动驾驶所需处理过程的思考。通常包含感知、预测、规划模块,同时辅助一些地图、定位等模块,实现自动驾驶功能的落地。
1.1.1、 感知:感知外部世界
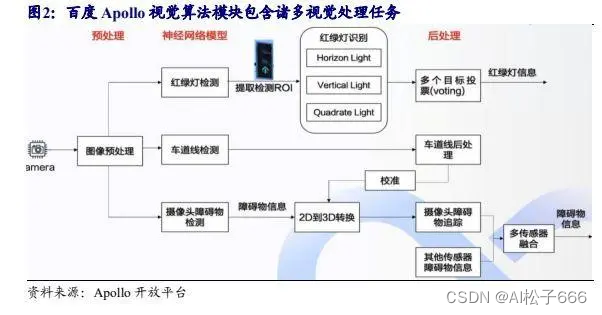
感知模块主要解决四类任务:(1)检测:找出物体在环境中的位置;(2)分类:明确对象是什么,如分辨不同类别交通标志;(3)跟踪:随着时间的推移观察移动物体,通常采用跨帧追踪对象(将不同帧中检测到的对象进行匹配)、BEV 加入时序信息等实现;(4)语义分割:将图像中的每个像素与语义类别匹配,如道路、天空、汽车等,用于尽可能详细了解环境。
以 Apollo 感知算法框架为例,其算法包含预处理、神经网络模型、后处理等模块。首先图像预处理主要是对图像进行调整、畸变校正等,使之更符合机器学习的要求。其次分别对红绿灯、车道线、障碍物等特征进行检测,其中红绿灯通过检测边框、颜色等进行进一步的识别;障碍物则经过 2D 到 3D 的转换,得出真实的信息坐标,再融合车道线检测信息、外部传感器信息等得出真实世界的障碍物信息。该部分通常采用全卷积神经网络或者 YOLO 等算法实现。
1.1.2、 预测:理解外部环境和当前状态
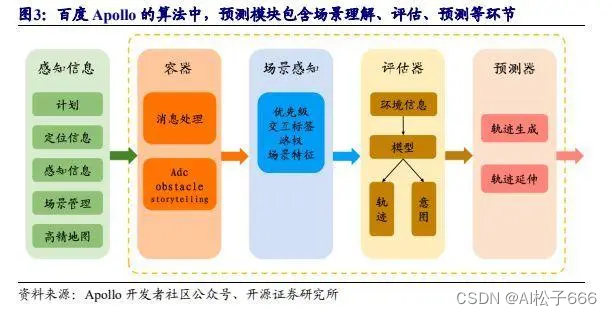
预测模块实际上是算法对外部环境和自车状态的理解。预测模块首先收集感知模块输入的车道线、障碍物、红绿灯、地图、定位等信息对主车的状况进行判断。
其次场景感知模块对外部障碍物的优先级、路权等外部环境对主车的影响进行感知。
评估器则会根据场景信息和障碍物信息判断出障碍物的轨迹或意图。预测器则根据短期的预测轨迹和意图判断障碍物等外部环境相对长期的轨迹。这将为未来汽车的规划提供重要的参考。算法层面通常以 RNN 为主。
1.1.3、 规划:思考如何行动
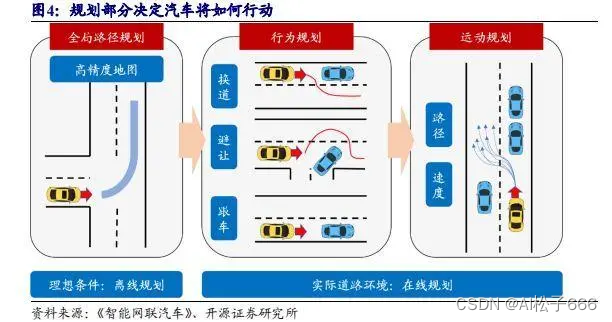
规划指找到合理路径来到达目的地。规划通常分为全局路径规划、行为规划与运动规划几个部分。其中,全局路径规划指智能汽车依靠地图规划出理想状态下到达目的地的路径。行为规划则是主车在实际行驶的过程中,面临实时的交通环境,做出的各类驾驶行为,如跟车、换道、避让等。运动规划生成与驾驶行为对应的驾驶轨迹,包含路径规划和速度规划。最后再采用一些优化方式让变道加速等行为变得平顺以满足舒适性要求。算法层面,通常采用基于规则的规划决策算法,前沿的玩家也开始引入机器学习等方式,以提升决策效能。
1.2大模型横空出世,自动驾驶奇点来临
早期自动驾驶方案采用激光雷达+高精度地图为主。早期市场以传统计算机视觉和专家系统为基础构建辅助驾驶功能,随后人工智能的蓬勃发展让深度学习在自动驾驶领域被广泛使用,以 waymo 为代表的自动驾驶先驱玩家开创了激光雷达+高精度地图的感知范式,Cruise、百度等巨头纷纷效仿。该方案中,对道路结构、车道线等静态环境元素的感知强依赖高精度地图,而实时的动静态障碍物信息则强依赖激光雷达。高精地图成为一项“基础设施”,将很多在线难以解决的问题提前存储到地图数据中,行车时作为一项重要的感知数据来源,减轻传感器和控制器的压力。由于该方案只能在有图地区行驶,也被一些人形象的称为“有轨电车”。
高昂的单车成本和高精度地图成为自动驾驶大规模推广瓶颈。Robotaxi 成本高昂(Yole 统计早期 Waymo 为代表的的自动驾驶汽车改装成本约为 20 万美元),高精度地图采集制作以及合规要求繁杂(量产落地过程中,高精度地图面临:采集成本高;人工修图制图费时费力;地图鲜度不足;国内法规严格等困难),带来该方案的泛化性较差。经过数十年的发展,Robotaxi 的使用范围仍被限制在特定区域,使用对象也仅局限在商用车领域。市场亟待出现一种单车性能强大、成本低廉的自动驾驶解决方案。
BEV+Transformer 横空出世,大模型推动自动驾驶迈向普及
2021 年特斯拉推出 BEV+transformer、重感知轻地图的自动驾驶解决方案,开启了自动驾驶行业新的篇章






![Amazon云计算AWS之[2]弹性计算云EC2](https://img-blog.csdnimg.cn/direct/0cb86a63e85f4773a1f19848822b075e.png)



