模型匹配控制(Model matching control)是指设计一个控制器使闭环系统的传递函数tf(s)与td(s)相一致!
mpcDesigner可以分为:
- 2时域精确模型匹配控制
- 3频域精确模型匹配控制
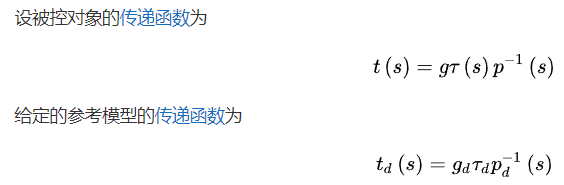
机械臂控制中应用模型匹配控制(Model Matching Control)的方法涉及设计一个控制器,使得闭环系统的传递函数与参考模型的传递函数相一致。这种控制方法的核心在于确定一个合适的对象控制输入,使得机械臂的输出能够渐近跟随参数模型的输出。
% 假设的线性离散时间模型
A=[0 1;-10/0.5 -0.2/0.5]; % 状态转移矩阵
B=[0 0;1/0.5 -1/0.5]; % 控制输入矩阵
C=[1 0;0 0]; % 输出矩阵
D=[0 0;0 1]; % 直接传递矩阵% 预测步长
N = 10; % 预测窗口的长度 % 控制输入约束
u_min = -1; % 控制输入的下限
u_max = 1; % 控制输入的上限 % 定义成本函数的权重
Q = eye(size(A, 1)); % 状态误差的权重
R = 1; % 控制输入的权重 % 初始状态
x0 = [0; 0]; % 初始状态向量(例如位置和速度) % 定义MPC函数
function u = mpc_controller(x0, A, B, C, D, N, Q, R, u_min, u_max) % 初始化预测的状态和控制输入序列 X = cell(N, 1); U = cell(N, 1); X{1} = x0; % 设置初始状态 % 构建优化问题的目标函数和约束条件 obj = @(U_vec) mpc_objective(U_vec, X, U, A, B, C, D, N, Q, R); lincon = []; % 线性约束(可以根据需要添加) lb = repmat(u_min, 1, N); % 控制输入的下限 ub = repmat(u_max, 1, N); % 控制输入的上限 % 将优化变量转换为向量形式 U_vec0 = repmat(NaN, 1, N); % 初始猜测值 % 求解优化问题 options = optimoptions('fmincon', 'Algorithm', 'sqp'); % 选择序列二次规划算法 [U_vec_opt, fval] = fmincon(obj, U_vec0, [], [], [], [], lb, ub, lincon, options); % 提取第一个控制输入并返回 u = U_vec_opt(1);
end % 定义MPC的目标函数
function J = mpc_objective(U_vec, X, U, A, B, C, D, N, Q, R) % 将优化变量转换为控制输入序列 for k = 1:N U{k} = U_vec(k); end % 预测状态序列 for k = 2:N X{k} = A * X{k-1} + B * U{k-1}; end % 计算并返回成本函数的值 X_vec = cell2mat(X); U_vec = cell2mat(U); J = sum(sum(Q * (X_vec - ref_trajectory(:, 1:N))' .^ 2)) + sum(R * U_vec' .^ 2);
end % 主循环(示例)
for k = 1:100 % 假设总共需要控制100步 % 获取当前状态(这里需要根据UR机器人的接口来实现) x0 = getURRobotCurrentState(); % 假设这是一个获取UR机器人当前状态的函数 % 调用MPC控制器计算控制输入 u = mpc_controller(x0, A, B, C, D, N, Q, R, u_min, u_max); % 应用控制输入到UR机器人(这里需要根据UR机器人的接口来实现) applyControlToURRobot(u); % 假设这是一个将控制输入应用到UR机器人的函数 % 等待下一个控制周期或进行其他操作 pause(0.1); % 假设控制周期为0.1秒
end