返回:OpenCV系列文章目录(持续更新中......)
上一篇:OpenCV实现霍夫变换(51)
下一篇:OpenCV 实现重新映射(50)

目标
在本教程中,您将学习如何:
- 使用 OpenCV 函数 HoughCircles()检测图像中的圆圈。
理论
Hough 圆变换
- Hough Circle 变换的工作方式与上一教程中介绍的 Hough Line 变换大致相似。
-
在线路检测情况下,一条线路由两个参数 (r,Q)定义。在圆的情况下,我们需要三个参数来定义一个圆:

其中 (xcenter,ycenter)定义中心位置(绿点,),r是半径,这让我们可以完全定义一个圆,如下图所示:

- 为了提高效率,OpenCV 实现了一种比标准 Hough 变换稍微棘手的检测方法:Hough 梯度方法,它由两个主要阶段组成。第一阶段涉及边缘检测和查找可能的圆心,第二阶段为每个候选中心找到最佳半径。有关更多详细信息,请查看《学习 OpenCV》一书或您最喜欢的计算机视觉参考书目
-
这个程序是做什么的?
- 加载图像并对其进行模糊处理以减少噪点
- 将 Hough Circle 变换应用于模糊图像。
- 在窗口中显示检测到的圆圈。
C++代码
我们将要解释的示例代码可以从这里下载。可以在此处找到一个稍微花哨的版本(显示用于更改阈值的跟踪栏)。
#include "opencv2/imgcodecs.hpp"
#include "opencv2/highgui.hpp"
#include "opencv2/imgproc.hpp"using namespace cv;
using namespace std;int main(int argc, char** argv)
{const char* filename = argc >=2 ? argv[1] : "smarties.png";// Loads an imageMat src = imread( samples::findFile( filename ), IMREAD_COLOR );// Check if image is loaded fineif(src.empty()){printf(" Error opening image\n");printf(" Program Arguments: [image_name -- default %s] \n", filename);return EXIT_FAILURE;}Mat gray;cvtColor(src, gray, COLOR_BGR2GRAY);medianBlur(gray, gray, 5);vector<Vec3f> circles;HoughCircles(gray, circles, HOUGH_GRADIENT, 1,gray.rows/16, // change this value to detect circles with different distances to each other100, 30, 1, 30 // change the last two parameters// (min_radius & max_radius) to detect larger circles);for( size_t i = 0; i < circles.size(); i++ ){Vec3i c = circles[i];Point center = Point(c[0], c[1]);// circle centercircle( src, center, 1, Scalar(0,100,100), 3, LINE_AA);// circle outlineint radius = c[2];circle( src, center, radius, Scalar(255,0,255), 3, LINE_AA);}imshow("detected circles", src);waitKey();return EXIT_SUCCESS;
}解释
我们使用的图像可以在这里找到
加载图像:
const char* filename = argc >=2 ? argv[1] : "smarties.png";// Loads an imageMat src = imread( samples::findFile( filename ), IMREAD_COLOR );// Check if image is loaded fineif(src.empty()){printf(" Error opening image\n");printf(" Program Arguments: [image_name -- default %s] \n", filename);return EXIT_FAILURE;}将其转换为灰度:
Mat gray;cvtColor(src, gray, COLOR_BGR2GRAY);应用中值模糊以减少噪点并避免误圆检测:
medianBlur(gray, gray, 5);继续应用 Hough Circle 变换:
vector<Vec3f> circles;HoughCircles(gray, circles, HOUGH_GRADIENT, 1,gray.rows/16, // change this value to detect circles with different distances to each other100, 30, 1, 30 // change the last two parameters// (min_radius & max_radius) to detect larger circles);- 带有参数:
- 灰色:输入图像(灰度)。
- circles:存储 3 个值集的向量:xc1,yc1 对于每个检测到的圆。
- HOUGH_GRADIENT:定义检测方法。目前,这是 OpenCV 中唯一可用的。
- dp = 1:分辨率的倒比。
- min_dist = gray.rows/16:检测到的中心之间的最小距离。
- param_1 = 200:内部 Canny 边缘检测器的上限阈值。
- param_2 = 100*:中心检测的阈值。
- min_radius = 0:要检测的最小半径。如果未知,则将零作为默认值。
- max_radius = 0:要检测的最大半径。如果未知,则将零作为默认值。
绘制检测到的圆圈:
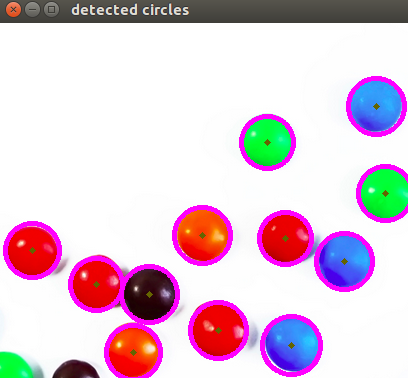
for( size_t i = 0; i < circles.size(); i++ ){Vec3i c = circles[i];Point center = Point(c[0], c[1]);// circle centercircle( src, center, 1, Scalar(0,100,100), 3, LINE_AA);// circle outlineint radius = c[2];circle( src, center, radius, Scalar(255,0,255), 3, LINE_AA);}你可以看到,我们将用红色画圆圈,用一个小绿点画中心
显示检测到的圆圈并等待用户退出程序:
imshow("detected circles", src);waitKey();结果
使用测试图像运行上述代码的结果如下所示:
参考文献:
1、《Hough Circle Transform》------Ana Huamán