文章目录
- 1.实现设备读写:write函数中一个进程写没问题,两进程写:第一个进程运行到kzalloc时,第二个进程也执行了kzalloc,只第二个进程地址保存在c中,第一个进程分配内存空间地址丢失造成内存泄漏。第一个进程运行到kzalloc时第二个进程调用了kfree,这时第一个进程执行到copy_from_user出现问题
- 2.同步和互斥:避免多进程同时操作设备问题
- 3.实现设备驱动的ioctl函数: nr=number
- 3.1 hello_chr_locked.h:ioctl的第二个参数即cmd即HC_IOC_RESET,正常情况要不都按值传递,要不都用指针
- 3.2 hello_chr_locked.c:ioctl执行硬件控制,除了读写设备文件外的其他操作,比如锁门、弹出介质、设置波特率、设置比特位等
- 3.3 ioctltest.c:测试函数操作ioctl,先insmod hello_chr_locked.ko
- 4.实现进程休眠:条件不够歇一歇,把CPU让给其他进程
- 5.内核表示时间和实现延时:linux中有一个时钟会周期性产生中断,linux将这中断作为时间基准
- 6.内核实现延缓操作:内核定时器,tasklet,workqueue
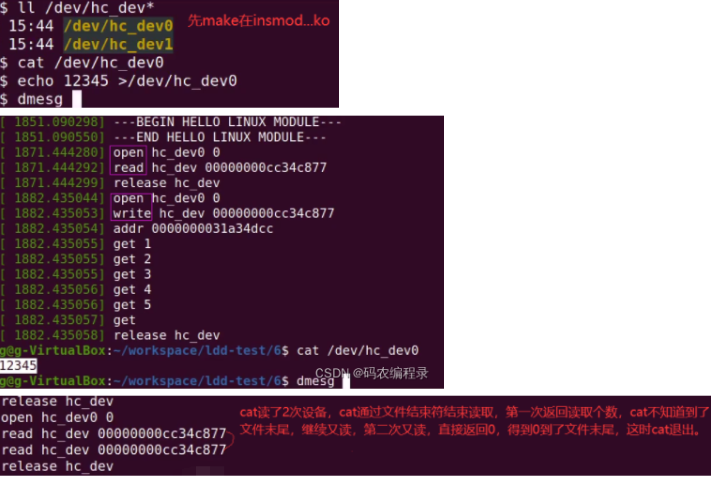
1.实现设备读写:write函数中一个进程写没问题,两进程写:第一个进程运行到kzalloc时,第二个进程也执行了kzalloc,只第二个进程地址保存在c中,第一个进程分配内存空间地址丢失造成内存泄漏。第一个进程运行到kzalloc时第二个进程调用了kfree,这时第一个进程执行到copy_from_user出现问题
2.同步和互斥:避免多进程同时操作设备问题
如下是不同步的表现。
// hello_chr_locked.c
/*信号量: sema_init() 初始化信号量down_interruptible() 获取信号量up() 释放信号量互斥锁: mutex_init()mutex_lock_interruptible() 获取mutex_unlock()
*/
#include<linux/module.h>
#include<linux/fs.h>
#include<linux/cdev.h>
#include<linux/slab.h>
#include<linux/uaccess.h>
#include<linux/jiffies.h>
#include<linux/sched.h>
#include<linux/semaphore.h> //信号量
#include<linux/mutex.h> //互斥锁
#define LOCK_USE 1 //0:semaphore, 1:mutex
#define HELLO_MAJOR 0
#define HELLO_NR_DEVS 2int hello_major = HELLO_MAJOR;
int hello_minor = 0;
dev_t devt; //高12位是主设备号,低20位是次设备号
int hello_nr_devs = HELLO_NR_DEVS;module_param(hello_major, int, S_IRUGO);
module_param(hello_minor, int, S_IRUGO);
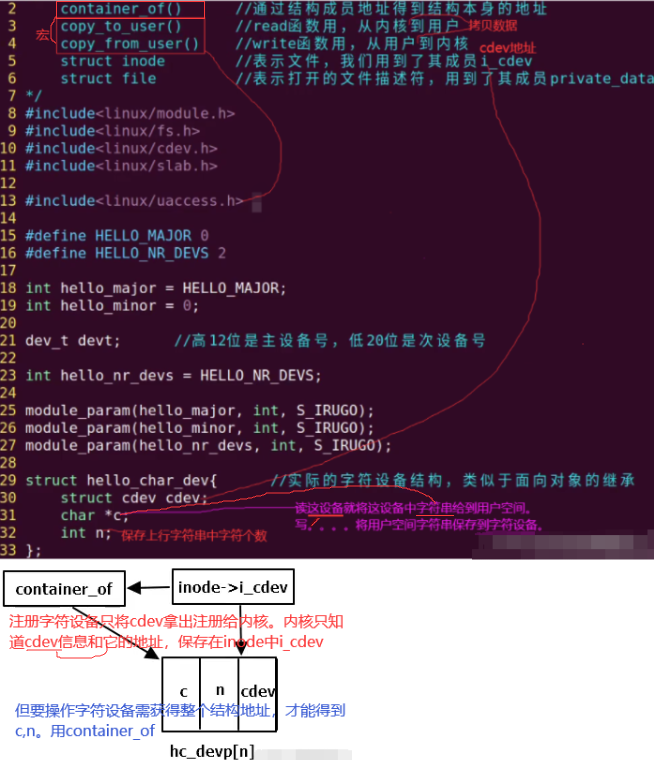
module_param(hello_nr_devs, int, S_IRUGO);struct hello_char_dev{ //实际的字符设备结构,类似于面向对象的继承struct cdev cdev;char *c;int n;struct semaphore sema; //信号量struct mutex mtx; //互斥锁 ,实际两者中一个就行
};
struct hello_char_dev *hc_devp;
struct class *hc_cls;//11111111111111111111111111111111111111111111111111111111111111111111111111111111111111111111111
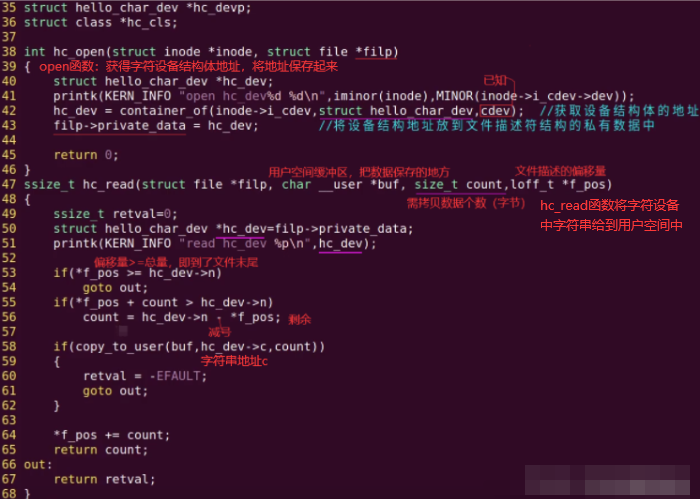
int hc_open(struct inode *inode, struct file *filp)
{struct hello_char_dev *hc_dev;printk(KERN_INFO "%s open \n",current->comm);hc_dev = container_of(inode->i_cdev,struct hello_char_dev,cdev); //获取设备结构体的地址filp->private_data = hc_dev; //将设备结构地址放到文件描述符结构的私有数据中return 0;
}ssize_t hc_read(struct file *filp, char __user *buf, size_t count,loff_t *f_pos)
{ssize_t retval=0;struct hello_char_dev *hc_dev=filp->private_data;printk(KERN_INFO "read hc_dev %p\n",hc_dev);if(*f_pos >= hc_dev->n)goto out;if(*f_pos + count > hc_dev->n)count = hc_dev->n - *f_pos;if(copy_to_user(buf,hc_dev->c,count)){retval = -EFAULT;goto out;}*f_pos += count;return count;
out:return retval;
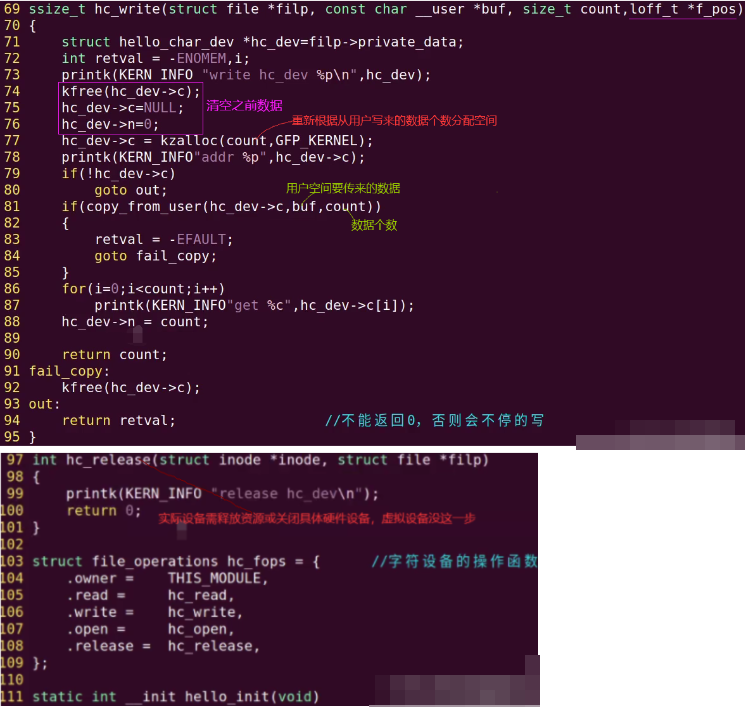
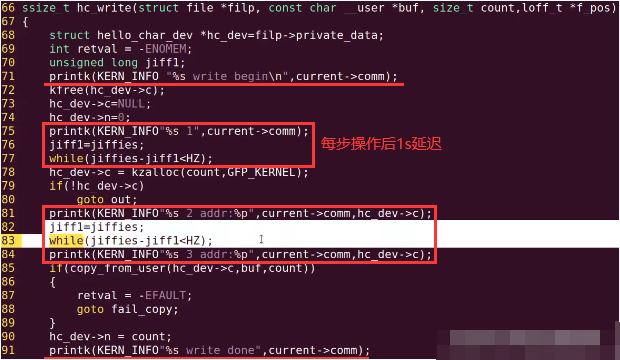
}ssize_t hc_write(struct file *filp, const char __user *buf, size_t count,loff_t *f_pos)
{struct hello_char_dev *hc_dev=filp->private_data;int retval = -ENOMEM;unsigned long jiff1;printk(KERN_INFO "%s write begin\n",current->comm);#if (LOCK_USE==0)if(down_interruptible(&hc_dev->sema)) //-EINTR down_interruptible获得信号量,成功获取返回0,执行后面操作。获取不到进行等待,让进程进入休眠状态。如果我们给它发送一个信号(不是信号量),它就会返回一个非0值,这个值就是EINTR,如果接到EINTR就返回ERESTARTSYS去重新获取信号量。如果接到信号后退出,下行就返回EINTR。return -ERESTARTSYS;printk(KERN_INFO "%s get sema\n",current->comm);#endif#if (LOCK_USE==1)if(mutex_lock_interruptible(&hc_dev->mtx)) //-EINTR mutex_lock_interruptible获得互斥量,参数同样是互斥量地址,获得到互斥量返回0(不进这个if里)执行后面操作,无法获得互斥量就会让进程进入休眠状态,接收到一个信号返回非0值即-EINTRreturn -ERESTARTSYS; printk(KERN_INFO "%s get mutex\n",current->comm);#endif//获得到信号量或互斥锁后就可正常执行如下写操作:kfree(hc_dev->c);hc_dev->c=NULL;hc_dev->n=0;printk(KERN_INFO"%s 1",current->comm);jiff1=jiffies;while(jiffies-jiff1<HZ);hc_dev->c = kzalloc(count,GFP_KERNEL);if(!hc_dev->c)goto out;printk(KERN_INFO"%s 2 addr:%p",current->comm,hc_dev->c);jiff1=jiffies;while(jiffies-jiff1<HZ);printk(KERN_INFO"%s 3 addr:%p",current->comm,hc_dev->c);if(copy_from_user(hc_dev->c,buf,count)){retval = -EFAULT;goto fail_copy;}hc_dev->n = count;//如上写操作执行完后,如下我们需要释放掉互斥量或互斥锁:#if (LOCK_USE==0)up(&hc_dev->sema); //up释放信号量,参数是信号量地址printk(KERN_INFO "%s up sema\n",current->comm);#endif#if (LOCK_USE==1)mutex_unlock(&hc_dev->mtx); //mutex_unlock释放互斥锁,参数是互斥锁地址printk(KERN_INFO "%s unlock mutex\n",current->comm);#endifprintk(KERN_INFO"%s write done",current->comm);return count;
fail_copy:kfree(hc_dev->c);
out:#if (LOCK_USE==0)up(&hc_dev->sema);#endif#if (LOCK_USE==1)mutex_unlock(&hc_dev->mtx);#endifreturn retval; //不能返回0,否则会不停的写
}int hc_release(struct inode *inode, struct file *filp)
{printk(KERN_INFO "%s release\n",current->comm);return 0;
}struct file_operations hc_fops = { //字符设备的操作函数.owner = THIS_MODULE,.read = hc_read,.write = hc_write,.open = hc_open,.release = hc_release,
};//1111111111111111111111111111111111111111111111111111111111111111111111111111111111111111111
static int __init hello_init(void)
{int ret,i;printk(KERN_INFO "---BEGIN HELLO LINUX MODULE---\n");if(hello_major){devt=MKDEV(hello_major,hello_minor);ret=register_chrdev_region(devt,hello_nr_devs,"hello_chr"); //使用指定的设备号分配}else{ret = alloc_chrdev_region(&devt,hello_minor,hello_nr_devs,"hello_chr");//动态分配主设备号hello_major = MAJOR(devt);}if (ret < 0) {printk(KERN_WARNING "hello: can't get major %d\n", hello_major);goto fail;}hc_devp = kzalloc(sizeof(struct hello_char_dev)*hello_nr_devs,GFP_KERNEL); //给字符设备分配空间,这里hello_nr_devs为2if(!hc_devp){printk(KERN_WARNING "alloc mem failed");ret = -ENOMEM;goto failure_kzalloc; // 内核常用goto处理错误}for(i=0;i<hello_nr_devs;i++){ #if (LOCK_USE==0)sema_init(&hc_devp[i].sema,1); // 初始化信号量,第一个参数:信号量地址。第二个参数:信号量个数,这里设为1,1个资源,当一个进程获得,其他进程等待。// 信号量可有多个,有一个进程来获取,信号量个数减1。直到信号量减到0,进程无法获取信号量。当其他进程释放信号量后,被休眠的进程才可以获得信号量。#elif (LOCK_USE==1)mutex_init(&hc_devp[i].mtx); // 初始化互斥量, 没有个数问题,因为只有一个,一个进程获得互斥锁,其他进程只能等待。上面信号量初始化为1和这里互斥锁类似。#endif cdev_init(&hc_devp[i].cdev,&hc_fops); // 初始化字符设备结构hc_devp[i].cdev.owner = THIS_MODULE;ret = cdev_add(&hc_devp[i].cdev,MKDEV(hello_major,hello_minor+i),1);if(ret){printk(KERN_WARNING"fail add hc_dev%d",i);}} hc_cls = class_create(THIS_MODULE,"hc_dev");if(!hc_cls){printk(KERN_WARNING"fail create class");ret = PTR_ERR(hc_cls);goto failure_class;}for(i=0;i<hello_nr_devs;i++){device_create(hc_cls,NULL,MKDEV(hello_major,hello_minor+i),NULL,"hc_dev%d",i);} printk(KERN_INFO "---END HELLO LINUX MODULE---\n");return 0;failure_class:kfree(hc_devp);
failure_kzalloc: unregister_chrdev_region(devt,hello_nr_devs);
fail:return ret; //返回错误,模块无法正常加载
}static void __exit hello_exit(void)
{int i; for(i=0;i<hello_nr_devs;i++){device_destroy(hc_cls,MKDEV(hello_major,hello_minor+i));}class_destroy(hc_cls);for(i=0;i<hello_nr_devs;i++)cdev_del(&hc_devp[i].cdev);kfree(hc_devp);unregister_chrdev_region(devt,hello_nr_devs); //移除模块时释放设备号 printk(KERN_INFO "GOODBYE LINUX\n");
}module_init(hello_init);
module_exit(hello_exit);
MODULE_LICENSE("Dual BSD/GPL");//许可 GPL、GPL v2、Dual MPL/GPL、Proprietary(专有)等,没有内核会提示
MODULE_AUTHOR("KGZ"); //作者
MODULE_VERSION("V1.0"); //版本
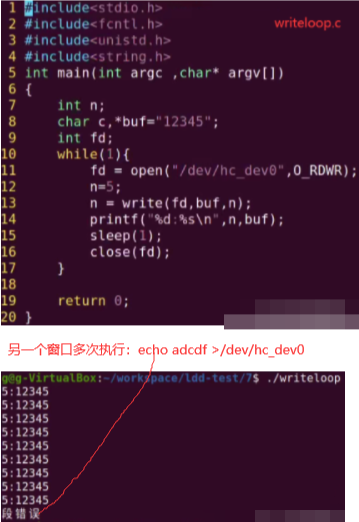
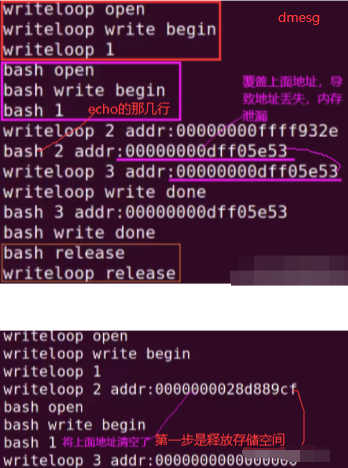
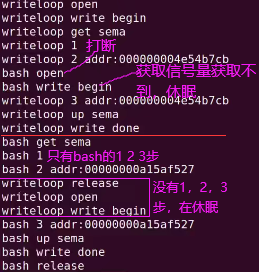
同理make后insmod,再运行writeloop和echo,dmesg。上面只是在写时加入互斥锁和信号量,读时也要加入。如下红线上面是writeloop,红线下面是bash,如下打印的get sema和up sema之间只有自己的1,2,3步。
3.实现设备驱动的ioctl函数: nr=number
3.1 hello_chr_locked.h:ioctl的第二个参数即cmd即HC_IOC_RESET,正常情况要不都按值传递,要不都用指针
#ifndef _HELLO_CHR_LOCKED_H_
#define _HELLO_CHR_LOCKED_H_#define HC_IOC_MAGIC 0x81 //type(0x81未被使用) //内核源码里Documentation/userspace-api/ioctl/ioctl-number.rst
#define HC_IOC_RESET _IO(HC_IOC_MAGIC,0) //序号0,作用是清空我们分配的空间,第一个参数幻数
#define HC_IOCP_GET_LENS _IOR(HC_IOC_MAGIC,1,int) //通过ioctl函数第三个参数以指针方式返回字符串长度
#define HC_IOCV_GET_LENS _IO(HC_IOC_MAGIC,2) //通过ioctl函数返回值返回字符串长度
#define HC_IOCP_SET_LENS _IOW(HC_IOC_MAGIC,3,int) //通过ioctl函数第三个参数以指针方式来设置字符串长度
#define HC_IOCV_SET_LENS _IO(HC_IOC_MAGIC,4) //通过ioctl函数第三个参数直接传入值来设置字符串长度
#define HC_IOC_MAXNR 4 //最大命令编号
#endif
3.2 hello_chr_locked.c:ioctl执行硬件控制,除了读写设备文件外的其他操作,比如锁门、弹出介质、设置波特率、设置比特位等
/*
如下第一个参数是文件描述符指针,第二个参数是ioctl命令,第三个参数是第二个参数对应命令的参数
long (*unlocked_ioctl 函数名) (struct file *filp, unsigned int cmd, unsigned long arg) ioctl的第二个参数即cmd(32位整形)构成:direction(方向:指明读写,2bits) , size(数据大小,14bits) type(幻数,唯一标识ioctl命令,8bits) , number(序数,命令的编号,8bits) 宏:_IO(type,nr) _IOR(type,nr,size) _IOW(type,nr,size) _IOWR(type,nr,size) // 为了构造上面cmd命令_IOC_DIR(nr) _IOC_TYPE(nr) _IOC_NR(nr) _IOC_SIZE(nr) // 从cmd命令中提取对应字段函数:access_ok() //检查用户空间地址是否可用,数据传输之前要用这个检查下put_user()和__put_user() //向用户空间写数据,put_user安全即里面执行了access_ok()get_user()和__get_user() //从用户空间接收数据,__get_user需先手动调access_ok()capable() //检查进程是否有权限,因为ioctl要对硬件进行控制和更改,需要进程被授权操作权限对于需要传入的数据量不大的ioctl函数,可以使用put_user()或get_user()【单个数据:可能1,2,4,8个字节】,如果传入数据量很大的话,可使用之前的copy_from_user(),copy_to_user()
*/
#include "hello_chr_locked.h" //上面自定义long hc_ioctl(struct file *filp, unsigned int cmd, unsigned long arg)
{struct hello_char_dev *hc_dev = filp->private_data; //得到设备的地址long retval = 0;int tmp,err=0;//如下两行判断传入的命令是否合法if (_IOC_TYPE(cmd) != HC_IOC_MAGIC) return -ENOTTY; //检查幻数(返回值POSIX标准规定,也用-EINVAL)if (_IOC_NR(cmd) > HC_IOC_MAXNR) return -ENOTTY; //检查命令编号//如下只判断读的空间,读的时候使用带下划线函数,写使用安全函数if (_IOC_DIR(cmd) & _IOC_READ) //涉及到用户空间与内核空间数据交互,判断读OK吗?err = !access_ok((void __user *)arg, _IOC_SIZE(cmd)); //第一个参数:用户空间地址。第二个参数:传入参数大小。ok返回1,err就是0,下行if(0)不执行if (err) return -EFAULT; // 前面判断都正常,说明命令合法进行如下switch(cmd){case HC_IOC_RESET:printk(KERN_INFO "ioctl reset\n");kfree(hc_dev->c);hc_dev->n=0;break;case HC_IOCP_GET_LENS:printk(KERN_INFO "ioctl get lens through pointer\n"); //指针方式传递retval = __put_user(hc_dev->n,(int __user *)arg); //第一个参数:你要传的数据 //第二个参数:用户空间地址break;case HC_IOCV_GET_LENS:printk(KERN_INFO "ioctl get lens through value\n");return hc_dev->n; //直接return这个值就行break;case HC_IOCP_SET_LENS:printk(KERN_INFO "ioctl set lens through pointer");if (! capable (CAP_SYS_ADMIN)) //具有管理员权限才可修改return -EPERM; retval = get_user(tmp,(int __user *)arg); //第一个参数:要保存数据的位置,第二个参数:用户空间传入的数据(这里是指针传入)//hc_dev->n = min(hc_dev->n,tmp);if(hc_dev->n>tmp) //判断这个值,和具体业务实现有关hc_dev->n=tmp;printk(KERN_INFO " %d\n",hc_dev->n);break;case HC_IOCV_SET_LENS:printk(KERN_INFO "ioctl set lens through value");if (! capable (CAP_SYS_ADMIN))return -EPERM; hc_dev->n = min(hc_dev->n,(int)arg); //arg就是值,直接赋值printk(KERN_INFO " %d\n",hc_dev->n);break;default: //前面做了cmd的检查,这里可以不需要break;} return retval;
}struct file_operations hc_fops = { //字符设备的操作函数.owner = THIS_MODULE,.read = hc_read,.write = hc_write,.open = hc_open,.release = hc_release,.unlocked_ioctl = hc_ioctl, //还有一个compat_ioctl(用于32位程序运行于64位系统上)
};
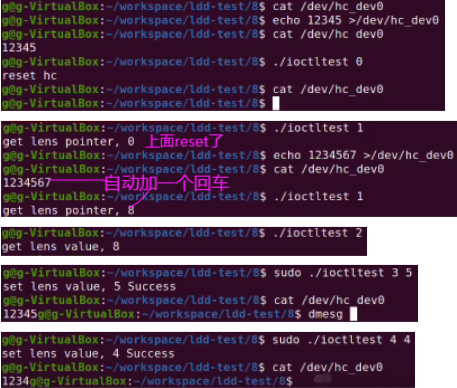
3.3 ioctltest.c:测试函数操作ioctl,先insmod hello_chr_locked.ko
#include<stdio.h>
#include<fcntl.h>
#include<unistd.h>
#include<string.h>
#include<sys/ioctl.h> //包括了一些构造命令那些宏
#include<errno.h>
#include"hello_chr_locked.h" //这样才能在应用空间找到对应命令int main(int argc ,char* argv[])
{int n,retval=0;int fd;fd = open("/dev/hc_dev0",O_RDWR);switch(argv[1][0]){case '0': //复位ioctl(fd,HC_IOC_RESET);printf("reset hc\n");break;case '1': //通过指针获取长度ioctl(fd,HC_IOCP_GET_LENS,&n);printf("get lens pointer, %d\n",n);break;case '2': //通过值获取长度n = ioctl(fd,HC_IOCV_GET_LENS);printf("get lens value, %d\n",n);break;case '3': //通过指针设置长度n=argv[2][0]-'0';retval = ioctl(fd,HC_IOCP_SET_LENS,&n);printf("set lens value, %d %s\n",n,strerror(errno));break;case '4': //通过值设置长度n=argv[2][0]-'0';retval = ioctl(fd,HC_IOCV_SET_LENS,n);printf("set lens value, %d %s\n",n,strerror(errno));break;}close(fd);return 0;
}
4.实现进程休眠:条件不够歇一歇,把CPU让给其他进程
有时候进程在读设备时,发现设备数据还没准备好,没办法正常读取设备。或在写设备时,发现设备缓冲区满,没办法正常写设备。在遇到这些情况时,进程该何去何从?进程在操作设备时,如果条件不满足,就让它进入休眠等待,直到条件满足,就可唤醒进程进行后面操作。
/*
初始化:DECLARE_WAIT_QUEUE_HEAD() //初始化等待队列头,宏的静态方式或wait_queue_head_t wq; //动态方式init_waitqueue_head(&wq);
休眠: wait_event() //不可被打断,死等,直到满足条件为止wait_event_interruptible() //可使用信号打断它,常用
唤醒: wake_up() //对应wait_event()wake_up_interruptible() //对应上面可中断方式休眠的进程wait_event_interruptible()
*/
# include <linux/wait.h>
DECLARE_WAIT_QUEUE_HEAD(wq); //等待队列头hc_read函数中
{...printk(KERN_INFO "read hc_dev %p\n",hc_dev);// wait_event(wq,hc_dev->c!=NULL); //第一个参数:等待队列头。第二个参数:等待条件: 如果设备字符串区(即echo值进设备文件里)为空就进入等待(唤醒方法在write函数中)。wait_event_interruptible(wq,hc_dev->c!=NULL);...
}hc_write函数中
{...printk(KERN_INFO"%s write done",current->comm);
// wake_up(&wq); // 当写入字符设备成功后(如上行)就调用wakeup函数唤醒等待队列上的进程wake_up_interruptible(&wq);return count; ...
}
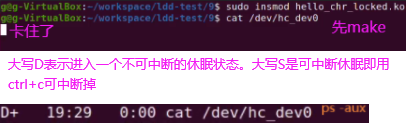
如下等待条件满足,如上卡住的即休眠的进程会正常退出(两个进程cat卡住休眠,执行如下一行,两个进程都不会卡住)。

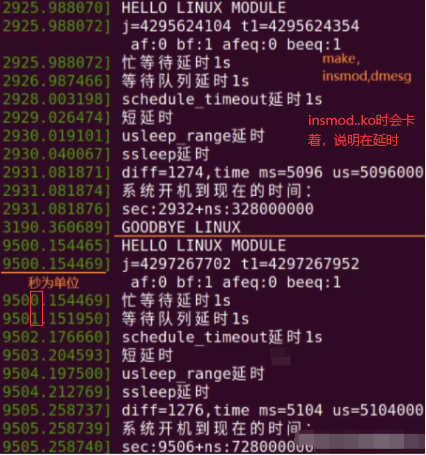
5.内核表示时间和实现延时:linux中有一个时钟会周期性产生中断,linux将这中断作为时间基准
/*
【中断频率】会保存在HZ(100-1000之间)这个变量里。【中断次数】会保存在jiffies变量里,可通过jiffies值获得到系统从开机到现在的时钟中断次数。常使用HZ和jiffies这两个变量构造各种时间函数比较2个jiffies时使用下面的宏(可避免32位系统溢出的问题):
time_after(a,b) a>b? a>b返回1,否则返回0
time_before(a,b) a<b?
time_after_eq(a,b) a>=b?
time_before_eq(a,b) a<=b?jiffies与常用时间之间的转换:
jiffies_to_msecs() //毫秒
jiffies_to_usecs() //微秒
msecs_to_jiffies()
usecs_to_jiffies() jiffies_to_timespec64() //timespec结构里有两个成员:一个是秒,另一个是微妙
timespec64_to_jiffies()延时:
wait_event_timeout() //除了关心条件是否成立外,还关心超时是否到时,如果超时时间一到,不管条件是否满足,这两函数都会返回退出,然后执行后面操作
wait_event_interruptible_timeout()set_current_state()
schedule_timeout() //单纯实现延时,不需要管条件,使用时需手动执行上一行改变当前进程状态ndelay() 三个函数均是忙等待即cpu死循环一直占用cpu资源 //纳秒
udelay() 系统常用, 微秒
mdelay() 毫秒,时间长,如果用到了mdelay,那么你可能需要考虑使用msleep休眠延时:
usleep_range() 10us以上 20ms以下
msleep() 毫秒延时
msleep_interruptible() 可用信号打断延时
ssleep() 秒级延时
fsleep(unsigned long usecs) 微妙级以上延迟,底层实现根据括号里提供的延迟长度选择上面ndelay等,5.13.2内核才有
*/
#include<linux/module.h>
#include<linux/jiffies.h>
#include<linux/sched.h>
#include<linux/delay.h>
unsigned long j,t1,diff;
struct timespec64 ts64;static int __init hello_init(void)
{wait_queue_head_t wait;init_waitqueue_head(&wait);printk(KERN_INFO "HELLO LINUX MODULE\n");j=jiffies; //保存程序刚开始运行的jiffies值t1=j+msecs_to_jiffies(1000); //+1秒(1000毫秒)延时printk(KERN_INFO "j=%ld t1=%ld\n af:%d bf:%d afeq:%d beeq:%d\n",j,t1,time_after(j,t1),time_before(j,t1),time_after_eq(j,t1),time_before_eq(j,t1));//111111111111111111111111111111111111111111111111111111111如下都是延迟1秒 //忙等待,不推荐使用,浪费系统性能,有可能让系统进入死循环出不来(比如禁止了中断)printk(KERN_INFO "忙等待延时1s\n");while(time_before(jiffies,t1)) //如果jiffies<t1,永远都是真,while一直循环{ //当jiffies>t1,条件为假,退出循环,实现了1s延迟}//等待队列延时printk(KERN_INFO "等待队列延时1s\n");wait_event_interruptible_timeout(wait,0,msecs_to_jiffies(1000)); //休眠函数实现延迟,第二个参数为0是不需要条件,第三个参数是以jiffies表示的时间长度,所以用到时间转为jiffies函数即msecs_to_jiffies即延迟1秒//schedule_timeout延时printk(KERN_INFO "schedule_timeout延时1s\n");set_current_state(TASK_INTERRUPTIBLE); //将进程状态设置为可中断的休眠schedule_timeout(msecs_to_jiffies(1000));//短延时函数printk(KERN_INFO "短延时\n");mdelay(1000); //延迟1s//休眠延时printk(KERN_INFO "usleep_range延时\n");usleep_range(10000,15000); //10毫秒到15毫秒printk(KERN_INFO "ssleep延时\n");ssleep(1); //延迟1s//1111111111111111111111111111111111111111111111111111111111111111111111111diff = jiffies - j; //获取如上中间一段的延时差值//如下在将jiffies转时间就能获取上面代码运行时间printk(KERN_INFO"diff=%ld,time ms=%d us=%d\n",diff,jiffies_to_msecs(diff),jiffies_to_usecs(diff)); //将jiffies差值转为毫秒和微妙值 printk(KERN_INFO "系统开机到现在的时间:\n");jiffies_to_timespec64(jiffies-INITIAL_JIFFIES,&ts64); //INITIAL_JIFFIES: 这个宏的值是系统刚开始运行时系统赋给jiffies的初值printk(KERN_INFO"sec:%lld+ns:%ld\n",ts64.tv_sec,ts64.tv_nsec);return 0;
}static void __exit hello_exit(void)
{printk(KERN_INFO "GOODBYE LINUX\n");
}
module_init(hello_init);
module_exit(hello_exit);
MODULE_LICENSE("Dual BSD/GPL");//许可 GPL、GPL v2、Dual MPL/GPL、Proprietary(专有)等,没有内核会提示
MODULE_AUTHOR("KGZ"); //作者
MODULE_VERSION("V1.0"); //版本
6.内核实现延缓操作:内核定时器,tasklet,workqueue
有时希望一个事件在指定时间之后(或一个事件发生后)运行而不影响当前操作,不影响当前操作,这时需要内核为我们提供一些机制:
1.如果想实现延迟指定时间之后执行指定操作,可使用内核定时器或workqueue工作队列。
2.如果想实现在一个事件发生之后再去执行其他操作,可使用tasklet或workqueue工作队列:这种情况多数发生在中断处理上,当一个中断发生后,在中断回调函数中希望尽可能短和尽可能快执行,所以把那些费时间的,不是很紧要的任务放稍后执行即放在中断回调函数后执行。
/*
1、内核定时器
struct timer_list
timer_setup() //初始化上面结构并绑定回调函数
mod_timer() //修改延时时间,调用mod_timer()后定时器开始定时,到达指定时间后调用绑定的回调函数
del_timer() //删除定时器2、tasklet
struct tasklet_struct
tasklet_init() //初始化:绑定回调函数以及传入参数数据
tasklet_hi_schedule() //让tasklet执行,带hi的对应回调函数在高优先级执行
tasklet_schedule() //正常执行tasklet
tasklet_kill() //移除tasklet 3、workqueue
alloc_workqueue() //分配一个工作队列,如果任务不重,可使用内核自带的工作队列
destroy_workqueue() struct work_struct //不需要延迟的操作,声明结构体
INIT_WORK() //初始化工作
queue_work() //将工作插入到工作队列中,内核自动调用对应工作struct delayed_work //需要延时的工作,先声明结构
INIT_DELAYED_WORK() //初始化这结构
queue_delayed_work() //将对应工作插入到工作队列中,内核会在指定定时时间后调用对应工作4、其他
in_interrupt() //指明当前上下文是不是在中断上下文,是在中断上下文则返回非0
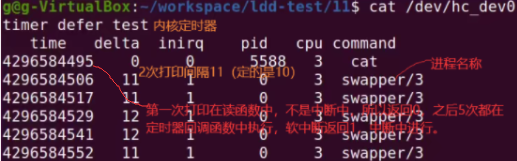
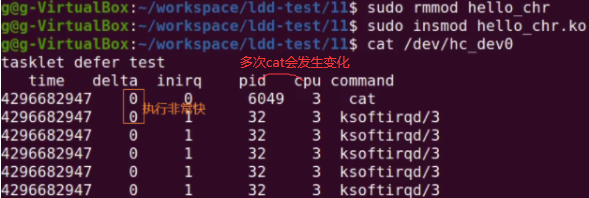
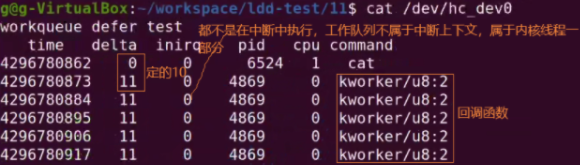
smp_processor_id() //返回当前运行所在cpu的id号通过读取设备文件构造下面的数据表:
// 第一列是用jiffies表示的时间值。delta是两次获取之间的时间间隔。inirq是in_interrupt函数返回值,是否是在中断中。pid表明当前进程执行的pid。cpu是当前进程执行的cpu。command是当前进程的名称。time delta inirq pid cpu command
4295601162 0 0 7559 0 cat
4295601162 0 1 10 0 ksoftirqd/0
4295601162 0 1 10 0 ksoftirqd/0
4295601162 0 1 10 0 ksoftirqd/0
4295601162 0 1 10 0 ksoftirqd/0
4295601162 0 1 10 0 ksoftirqd/0
./Documentation/core-api/workqueue.rst
*/
#include<linux/module.h>
#include<linux/fs.h>
#include<linux/cdev.h>
#include<linux/slab.h>
#include<linux/uaccess.h>
#include<linux/interrupt.h> //包括了tasklet、timer.h和workqueue.h
#include<linux/timer.h> //定时器
#include<linux/workqueue.h> //工作队列#define DEFER_TEST 2 //(0:timer 1:tasklet 2:workqueue)
#define DELAY_WORK //workqueue通过定义这行宏决定延时还是不延时
#define HELLO_MAJOR 0
#define HELLO_NR_DEVS 2int hello_major = HELLO_MAJOR;
int hello_minor = 0;
dev_t devt; //高12位是主设备号,低20位是次设备号
int hello_nr_devs = HELLO_NR_DEVS;module_param(hello_major, int, S_IRUGO);
module_param(hello_minor, int, S_IRUGO);
module_param(hello_nr_devs, int, S_IRUGO);struct hello_char_dev{ //实际的字符设备结构,类似于面向对象的继承struct cdev cdev;char * buff; //管理缓冲区int loops; //限制循环次数int tdelay; //两次打印时间间隔unsigned long prej; //保存上一次jiffies时间值
#if (DEFER_TEST==0) //DEFER_TEST宏管理(在最前面定义)struct timer_list t1; //使用定时器,声明定时器结构
#elif (DEFER_TEST==1)struct tasklet_struct tsklt; //使用tasklet,声明tasklet结构
#else
#ifdef DELAY_WORK //通过这个宏决定延迟还是不延迟的工作队列struct delayed_work work; //使用workqueue,声明workqueue结构
#elsestruct work_struct work;
#endif
#endif
}; //如上是整个结构体
struct hello_char_dev *hc_devp;
struct class *hc_cls;
DECLARE_WAIT_QUEUE_HEAD(wq);int hc_open(struct inode *inode, struct file *filp)
{struct hello_char_dev *hc_dev;printk(KERN_INFO "%s open \n",current->comm);hc_dev = container_of(inode->i_cdev,struct hello_char_dev,cdev); //获取设备结构体的地址filp->private_data = hc_dev; return 0;
}//11111111111111111111111111111111111111111111111111111111111111111111111定时器begain
#if (DEFER_TEST==0)
void timer_fn(struct timer_list *t) //回调函数,timer_list是放在字符设备的结构体中,所以下行要用container_of通过结构体成员获得结构体指针
{struct hello_char_dev *hc_dev = container_of(t,struct hello_char_dev,t1); //拿到字符设备指针hc_dev->buff+=sprintf(hc_dev->buff,"%9ld %3ld %i %6i %i %s\n",jiffies, jiffies-hc_dev->prej, in_interrupt()? 1 : 0,current->pid, smp_processor_id(), current->comm);if(--hc_dev->loops) //如果loops值不为0{mod_timer(t,jiffies+hc_dev->tdelay); //改变定时器定时时间,继续让定时器延时回调,循环5次hc_dev->prej = jiffies;}else{ // 5次后loops为0执行elsedel_timer(t); //删除定时器//del_timer_sync(t);wake_up_interruptible(&wq); //唤醒hc_read函数进程}
}ssize_t hc_read(struct file *filp, char __user *buf, size_t count,loff_t *f_pos)
{ssize_t retval=0;size_t cnt;char *buf1;struct hello_char_dev *hc_dev=filp->private_data; //拿到字符设备指针printk(KERN_INFO "timer defer test\n");if(*f_pos > 0)goto out;hc_dev->loops = 5;hc_dev->tdelay = 10; //定时器每隔10buf1 = kzalloc(400,GFP_KERNEL); //给缓冲区分配空间保存在buf1临时变量中hc_dev->buff = buf1; //下面几行是在缓冲里放数据hc_dev->buff += sprintf(hc_dev->buff, "timer defer test\n");hc_dev->buff += sprintf(hc_dev->buff, " time delta inirq pid cpu command\n");hc_dev->buff += sprintf(hc_dev->buff, "%9li %3li %i %6i %i %s\n",jiffies, 0L, in_interrupt() ? 1 : 0,current->pid, smp_processor_id(), current->comm); // 赋一行数据timer_setup(&hc_dev->t1,timer_fn,0); //初始化定时器,timer_fn对应回调函数mod_timer(&hc_dev->t1,jiffies+hc_dev->tdelay); //修改delay时间,当前jiffies+需延迟jiffies值hc_dev->prej = jiffies; //当前jiffies值保存在字符设备prej变量中wait_event_interruptible(wq, !hc_dev->loops); //让当前的read进行休眠//如下是timer_fn回调函数将此函数hc_read唤醒,继续执行cnt =hc_dev->buff - buf1; //多少字节if(copy_to_user(buf,buf1,cnt)) //将数据传给用户空间{retval = -EFAULT;goto out;}*f_pos += cnt;kfree(buf1);return cnt;
out:return retval;
} //如上整个操作完成了,实现了定时器每隔10个jiffies回调一次,打印一下当前信息,一共打印5次
//11111111111111111111111111111111111111111111111111111111111111111111定时器end//1111111111111111111111111111111111111111111111111111111111111111111tasklet begain
#elif (DEFER_TEST==1)
void tasklet_fn(unsigned long data) //回调函数
{struct hello_char_dev *hc_dev =(struct hello_char_dev *) data;hc_dev->buff+=sprintf(hc_dev->buff,"%9ld %3ld %i %6i %i %s\n",jiffies, jiffies-hc_dev->prej, in_interrupt()? 1 : 0,current->pid, smp_processor_id(), current->comm);if (--hc_dev->loops) {hc_dev->prej = jiffies;tasklet_hi_schedule(&hc_dev->tsklt);//tasklet_schedule(&hc_dev->tsklt);} else { // 5次后,loops为0wake_up_interruptible(&wq); //唤醒读进程}
}ssize_t hc_read(struct file *filp, char __user *buf, size_t count,loff_t *f_pos)
{ssize_t retval=0;int cnt;char * buf1;struct hello_char_dev *hc_dev=filp->private_data;printk(KERN_INFO "tasklet defer test\n");if(*f_pos > 0)goto out;hc_dev->loops = 5;buf1 = kzalloc(400,GFP_KERNEL);hc_dev->buff = buf1;hc_dev->buff += sprintf(hc_dev->buff, "tasklet defer test\n");hc_dev->buff += sprintf(hc_dev->buff, " time delta inirq pid cpu command\n");hc_dev->buff += sprintf(hc_dev->buff, "%9li %3li %i %6i %i %s\n",jiffies, 0L, in_interrupt() ? 1 : 0,current->pid, smp_processor_id(), current->comm);tasklet_init(&hc_dev->tsklt,tasklet_fn,(unsigned long)hc_dev); //第一个参数:tasklet结构体地址。第二个参数:回调函数。第三个参数:传入回调函数的数据参数,将字符设备地址强转为long传入。hc_dev->prej = jiffies;tasklet_hi_schedule(&hc_dev->tsklt);//tasklet_schedule(&hc_dev->tsklt);wait_event_interruptible(wq, !hc_dev->loops); //等待执行完成tasklet_kill(&hc_dev->tsklt); //清除taskletcnt =hc_dev->buff - buf1; //获得到这个buf里有多少字节if(copy_to_user(buf,buf1,cnt)) //将数据传给用户空间{retval = -EFAULT;goto out;}*f_pos += cnt;kfree(buf1); //释放存储空间返回return cnt;
out:return retval;
}
//111111111111111111111111111111111111111111111111111111111111111111111tasklet end//1111111111111111111111111111111111111111111111111111111111111111111workqueue begain
#else
struct workqueue_struct *workq = NULL;void workqueue_fn(struct work_struct *work) //回调函数
{
#ifdef DELAY_WORKstruct delayed_work *dwork = container_of(work,struct delayed_work,work); //通过work找到delayed_work地址struct hello_char_dev *hc_dev = container_of(dwork,struct hello_char_dev,work); //通过dwork地址找到字符设备地址
#elsestruct hello_char_dev *hc_dev = container_of(work,struct hello_char_dev,work);
#endifhc_dev->buff+=sprintf(hc_dev->buff,"%9ld %3ld %i %6i %i %s\n",jiffies, jiffies-hc_dev->prej, in_interrupt()? 1 : 0,current->pid, smp_processor_id(), current->comm);if (--hc_dev->loops) {hc_dev->prej = jiffies;
#ifdef DELAY_WORKqueue_delayed_work(workq,dwork,hc_dev->tdelay); //继续执行回调函数
#elsequeue_work(workq,work);
#endif} else {wake_up_interruptible(&wq);}
}ssize_t hc_read(struct file *filp, char __user *buf, size_t count,loff_t *f_pos)
{ssize_t retval=0;int cnt;char * buf1;struct hello_char_dev *hc_dev=filp->private_data;printk(KERN_INFO "workqueue defer test\n");if(*f_pos > 0)goto out;workq = alloc_workqueue("workq",WQ_UNBOUND,0); // 第三个参数默认填0hc_dev->loops = 5;
#ifdef DELAY_WORKhc_dev->tdelay = 10;
#endifbuf1 = kzalloc(400,GFP_KERNEL);hc_dev->buff = buf1;hc_dev->buff += sprintf(hc_dev->buff, "workqueue defer test\n");hc_dev->buff += sprintf(hc_dev->buff, " time delta inirq pid cpu command\n");hc_dev->buff += sprintf(hc_dev->buff, "%9li %3li %i %6i %i %s\n",jiffies, 0L, in_interrupt() ? 1 : 0,current->pid, smp_processor_id(), current->comm); hc_dev->prej = jiffies;
#ifdef DELAY_WORKINIT_DELAYED_WORK(&hc_dev->work,workqueue_fn); //初始化延迟工作队列queue_delayed_work(workq,&hc_dev->work,hc_dev->tdelay); //将工作添加到工作队列中,第三个参数指定延时时间
#elseINIT_WORK(&hc_dev->work,workqueue_fn);queue_work(workq,&hc_dev->work);
#endif wait_event_interruptible(wq, !hc_dev->loops); // 进程休眠destroy_workqueue(workq);cnt =hc_dev->buff - buf1;if(copy_to_user(buf,buf1,cnt)){retval = -EFAULT;goto out;}*f_pos += cnt;kfree(buf1);return cnt;
out:return retval;
}
#endif
//1111111111111111111111111111111111111111111111111111111111111111workqueue endssize_t hc_write(struct file *filp, const char __user *buf, size_t count,loff_t *f_pos)
{printk(KERN_INFO "write hc_dev\n");return count; //不能返回0,否则会不停的写
}int hc_release(struct inode *inode, struct file *filp)
{printk(KERN_INFO "release hc_dev\n");return 0;
}struct file_operations hc_fops = { //字符设备的操作函数.owner = THIS_MODULE,.read = hc_read,.write = hc_write,.open = hc_open,.release = hc_release,
};static int __init hello_init(void)
{int ret,i;printk(KERN_INFO "---BEGIN HELLO LINUX MODULE---\n");if(hello_major){devt=MKDEV(hello_major,hello_minor);ret=register_chrdev_region(devt,hello_nr_devs,"hello_chr"); //使用指定的设备号分配}else{ret = alloc_chrdev_region(&devt,hello_minor,hello_nr_devs,"hello_chr");//动态分配主设备号hello_major = MAJOR(devt);}if (ret < 0) {printk(KERN_WARNING "hello: can't get major %d\n", hello_major);goto fail;}hc_devp = kzalloc(sizeof(struct hello_char_dev)*hello_nr_devs,GFP_KERNEL); //给字符设备分配空间,这里hello_nr_devs为2if(!hc_devp){printk(KERN_WARNING "alloc mem failed");ret = -ENOMEM;goto failure_kzalloc; //内核常用goto处理错误}for(i=0;i<hello_nr_devs;i++){ cdev_init(&hc_devp[i].cdev,&hc_fops); //初始化字符设备结构hc_devp[i].cdev.owner = THIS_MODULE;ret = cdev_add(&hc_devp[i].cdev,MKDEV(hello_major,hello_minor+i),1); //添加该字符设备到系统中if(ret){printk(KERN_WARNING"fail add hc_dev%d",i);}} hc_cls = class_create(THIS_MODULE,"hc_dev");if(!hc_cls){printk(KERN_WARNING"fail create class");ret = PTR_ERR(hc_cls);goto failure_class;}for(i=0;i<hello_nr_devs;i++){device_create(hc_cls,NULL,MKDEV(hello_major,hello_minor+i),NULL,"hc_dev%d",i);} printk(KERN_INFO "---END HELLO LINUX MODULE---\n");return 0;failure_class:kfree(hc_devp);
failure_kzalloc: unregister_chrdev_region(devt,hello_nr_devs);
fail:return ret; //返回错误,模块无法正常加载
}static void __exit hello_exit(void)
{int i; for(i=0;i<hello_nr_devs;i++){device_destroy(hc_cls,MKDEV(hello_major,hello_minor+i));}class_destroy(hc_cls);for(i=0;i<hello_nr_devs;i++)cdev_del(&hc_devp[i].cdev);kfree(hc_devp);unregister_chrdev_region(devt,hello_nr_devs); //移除模块时释放设备号 printk(KERN_INFO "GOODBYE LINUX\n");
}module_init(hello_init);
module_exit(hello_exit);
MODULE_LICENSE("Dual BSD/GPL");//许可 GPL、GPL v2、Dual MPL/GPL、Proprietary(专有)等,没有内核会提示
MODULE_AUTHOR("KGZ"); //作者
MODULE_VERSION("V1.0"); //版本
如下delta连1次jiffies值改变都没达到。
非延迟工作队列效果跟tasklet类似,把API换成没有delayed的即可。
![[渗透利器]全能工具=信息收集->漏洞扫描->EXP调用](https://img-blog.csdnimg.cn/img_convert/28a247f684de66df1111e3dcefadc0b5.png)