题目: Towards Robust Trajectory Representations: Isolating Environmental Confounders with Causal Learning
作者:Kang Luo, Yuanshao Zhu, Wei Chen, Kun Wang(王琨), Zhengyang Zhou(周正阳), Sijie Ruan(阮思捷), Yuxuan Liang(梁宇轩)
机构:香港科技大学(广州),中国科学技术大学,北京理工大学
arXiv网址:https://arxiv.org/abs/2404.14073
Cool Paper:https://papers.cool/arxiv/2404.14073
关键词:轨迹表示,因果学习,环境混杂因素,稳健性,泛化能力
TL; DR: 本文提出了一个基于因果学习的轨迹建模框架TrajCL,通过构建结构因果模型来分析轨迹数据、环境因素和轨迹表示之间的相互作用,并设计了环境对齐模块和因果学习模块来隔离地理空间环境因素的混杂效应,从而提高轨迹表示的稳健性和泛化能力。

robust和robustness,在这里我都翻译为稳健性。
TrajCL同名的还有一篇发表在ICDE23的轨迹相似度检测的文章:Contrastive Trajectory Similarity Learning with Dual-Feature Attention
(那里的CL指的是对比学习(Contrastive Learning))
🌟【紧跟前沿】“时空探索之旅”与你一起探索时空奥秘!🚀
欢迎大家关注时空探索之旅
摘要
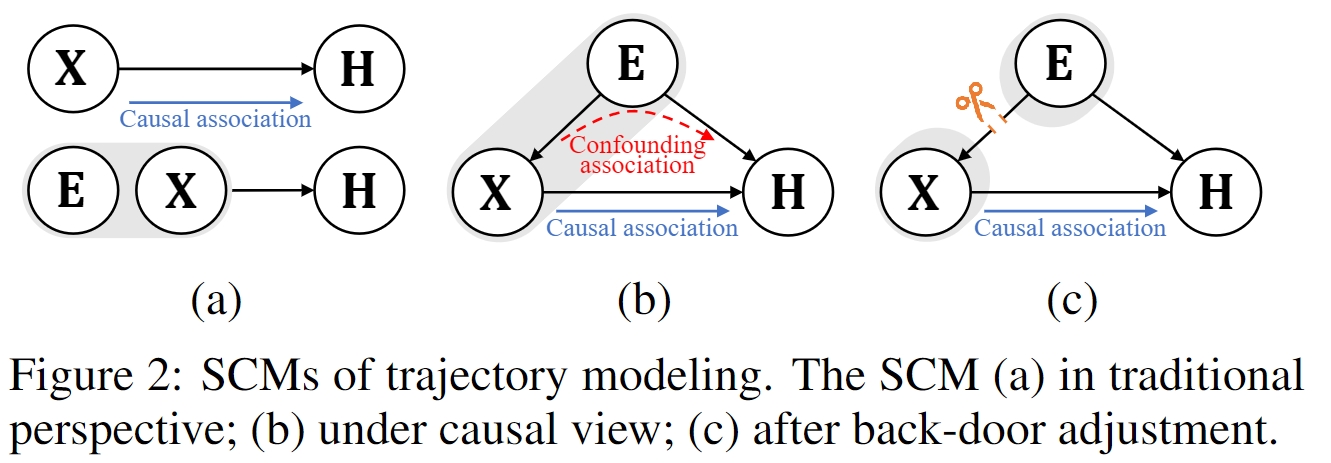
轨迹建模是指描述人类运动行为的特征,是理解移动模式的关键一步。 然而,现有的研究通常忽略地理空间背景的混杂影响,导致获得虚假的相关性和有限的泛化能力。 为了弥补这一差距,本文首先制定了结构因果模型(Structural Causal Model,SCM),从因果角度解读轨迹表示学习过程。 在 SCM 的基础上,进一步提出了一种基于因果学习的轨迹建模框架(TrajCL),该框架利用后门调整理论作为干预工具来消除地理空间上下文和轨迹之间的虚假相关性。 对两个真实世界数据集的大量实验验证了 TrajCL 显着增强了轨迹分类任务的性能,同时展示了卓越的泛化性和可解释性。
Q: 这篇论文试图解决什么问题?
A: 这篇论文试图解决的问题是如何在轨迹建模中消除地理空间环境因素带来的混杂效应,以提高轨迹表示的稳健性和泛化能力。具体来说,论文的主要贡献和解决的问题可以总结如下:
- 轨迹表示学习的因果视角:论文提出了一个结构因果模型(Structural Causal Model, SCM),从因果关系的角度分析轨迹表示学习过程中的变量关系,包括轨迹数据、环境因素以及轨迹表示之间的相互作用。
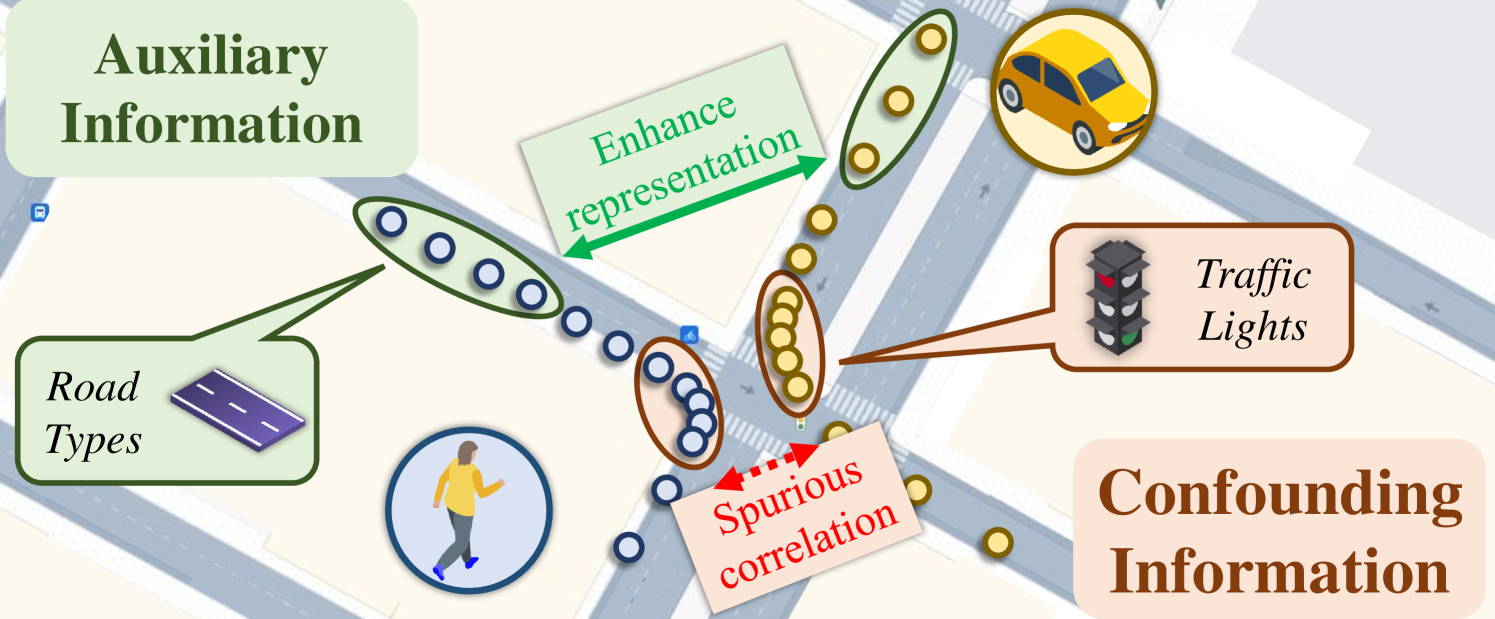
- 混杂因素的识别与隔离:论文指出,地理空间环境因素(如交通灯、道路类型等)可能会引入混杂效应,导致模型学习到的轨迹表示与实际的移动模式之间的关联性不具有因果性,而是由于环境因素的干扰产生的。
- 因果学习框架(TrajCL):为了解决上述问题,论文提出了一个基于因果学习的轨迹建模框架TrajCL,该框架利用后门调整理论(backdoor adjustment theory)作为干预工具,通过设计环境对齐模块和因果学习模块,来消除地理空间环境因素与轨迹之间的混杂关联。
- 实验验证:通过在两个真实世界的轨迹数据集上的广泛实验,论文验证了TrajCL在轨迹分类任务中的性能提升,展示了其在少数样本学习或不平衡样本学习场景下的优越泛化能力和可解释性。
总的来说,这篇论文的目标是通过因果学习方法,提高轨迹数据建模的稳健性和泛化能力,使其能够更好地理解和预测人类移动模式。
Q: 有哪些相关研究?
A: 论文中提到的相关研究主要分为两个领域:轨迹建模和因果推断。以下是一些关键的相关研究:
- 轨迹建模:
- 早期的基于启发式的方法,如使用空间网格方法来探索轨迹子结构的空间特性。
- 利用局部和全局特征进行旅行模式分类的研究。
- 将语义信息(如道路网络)融入轨迹分类的研究。
- 利用深度学习模型,如循环神经网络(RNN)和变换器(Transformer)来捕捉轨迹的高阶运动模式。
- 因果推断:
- 传统因果推断研究,关注如何在不同分布下学习因果模型,并使用因果模型进行干预或反事实推断。
- 因果表示学习,旨在结合深度学习和因果推断,广泛应用于计算机视觉、推荐系统、图数据挖掘等领域。
- 具体研究工作:
- [Lee and Han, 2008] 提出了一种基于空间网格的方法,用于轨迹分类。
- [Zheng et al., 2008] 和 [Dodge et al., 2009] 提取了子网格和轨迹点的局部和全局特征。
- [Xiao et al., 2017] 结合了语义信息,如道路网络,以分类车辆轨迹。
- [Liu and Lee, 2017] 和 [Jiang et al., 2017] 使用了两种常见的RNN架构来捕捉高阶运动模式。
- [Liu et al., 2019] 和 [Liang et al., 2021] 引入了段卷积加权机制和神经微分方程。
- [Han et al., 2021] 和 [Yao et al., 2022] 通过图神经网络集成了道路网络的空间特征。
- [Liang et al., 2022] 采用了先进的变换器架构来平衡轨迹建模的速度和准确性。
- 因果推断在其他领域的应用:
- [Li et al., 2023] 从因果角度研究了时间序列的分布变化。
- [Deng et al., 2023] 构建了因果图来描述交通预测,并分析了时空特征与结果之间的因果关系。
- [Xia et al., 2023] 应用因果推断来减轻时空图预测中的混杂效应。
这些研究表明,轨迹建模和因果推断是两个活跃的研究领域,并且在轨迹数据的分析和理解中具有重要的应用潜力。论文提出的TrajCL框架结合了这两个领域的技术,以提高轨迹表示的稳健性和泛化能力。
Q: 论文如何解决这个问题?
A: 论文通过提出一个名为TrajCL的因果学习框架来解决轨迹表示中的混杂效应问题。具体来说,TrajCL框架包括以下几个关键步骤:
- 结构因果模型(SCM):首先,论文建立了一个SCM来分析轨迹数据、环境因素和轨迹表示之间的因果关系。SCM帮助识别了环境因素作为混杂因子,可能在轨迹数据和轨迹表示之间引入的后门路径。
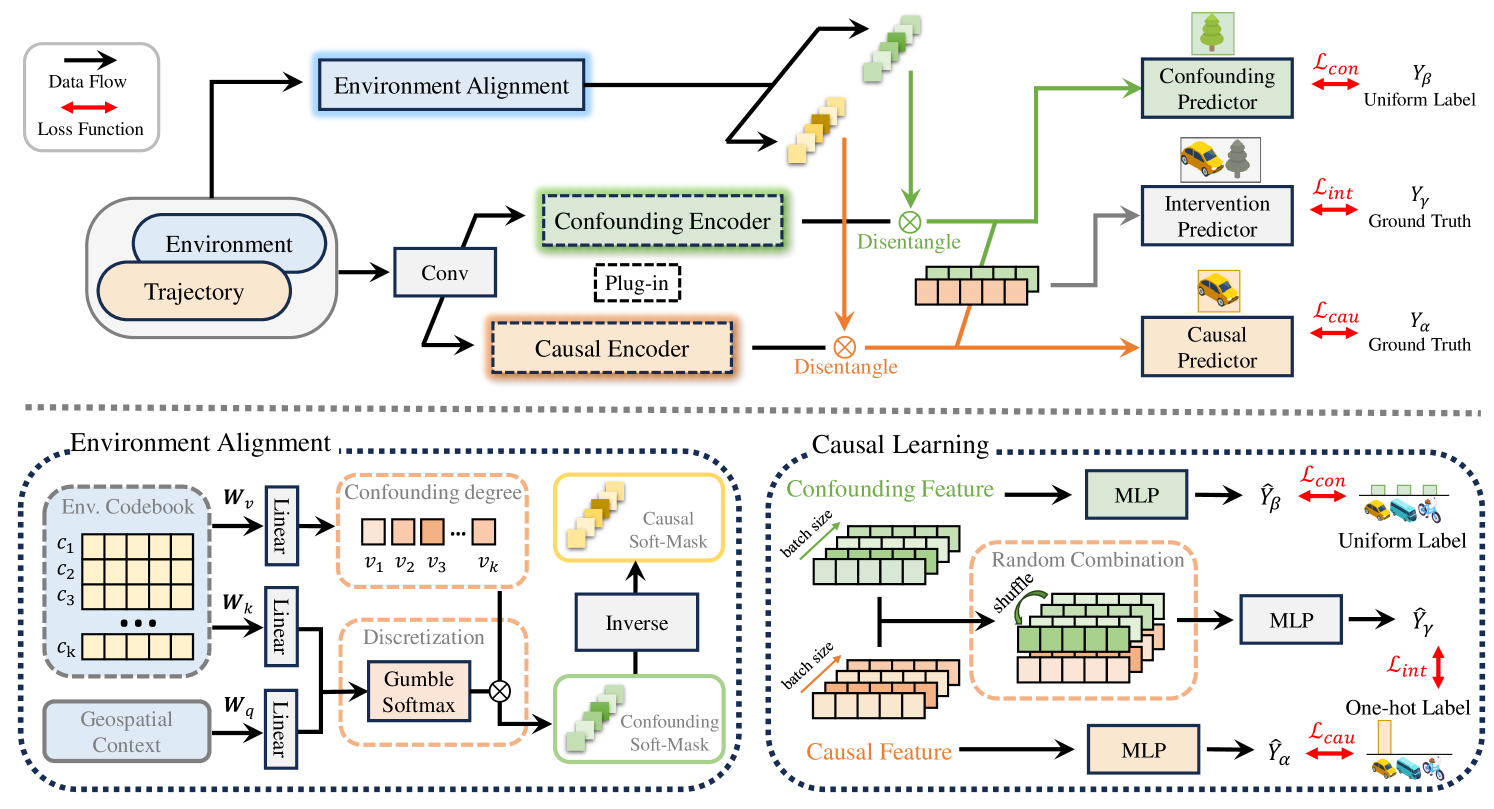
- 环境对齐模块:设计了一个环境对齐模块,该模块使用地理空间上下文来指导编码器分离因果和混杂表示。这个模块包括一个交叉注意力组件和一个分离分配组件,用于学习混杂感知和因果感知的软掩码。
- 因果学习模块:通过设计不同的策略来实现后门调整,包括分离学习策略、干预学习策略和最终的优化过程。分离学习策略使用多层感知器(MLP)对两个分支的特征进行分类,以区分因果特征和混杂特征。干预学习策略通过层次化操作混杂特征并将其与因果特征随机组合,以实现后门调整。
- 后门调整:利用后门调整理论,通过估计P(H|do(X))来阻断后门路径,其中do(·)表示do-calculus。这涉及到对环境因素进行干预,以消除其对轨迹表示的混杂影响。
- 实验验证:在两个真实世界的轨迹数据集上进行广泛的实验,验证了TrajCL在轨迹分类任务中的性能提升,并展示了其在少数样本学习和不平衡样本学习场景下的优越泛化能力和可解释性。
通过这些步骤,TrajCL能够有效地从人类轨迹中提取出稳健和领域不变的表示,同时减少对特定环境条件的过拟合风险。
Q: 论文做了哪些实验?


A: 论文中进行了多项实验来验证TrajCL框架的性能和稳健性。以下是实验的主要部分:
- 实验设置:
- 使用了两个公开的真实世界轨迹数据集:GeoLife和GrabPosisi。
- 对轨迹数据进行了预处理,包括将原始轨迹分割成较短的子轨迹实例,并提取了地理空间上下文特征。
- 基线模型:
- 选择了五个代表性的基线模型,包括GRU、BiLSTM、GRU-D、STGN和TrajFormer,这些模型都是轨迹建模领域的常见模型。
- 性能比较:
- 在不同的模型设置下,比较了原始基线模型、加入环境信息后的模型以及应用了TrajCL框架后的模型的性能。
- 稳健性测试:
- 少数样本学习:将原始数据集划分为不同大小的子集,以模拟少数样本学习场景,并在不同模型上实施TrajCL。
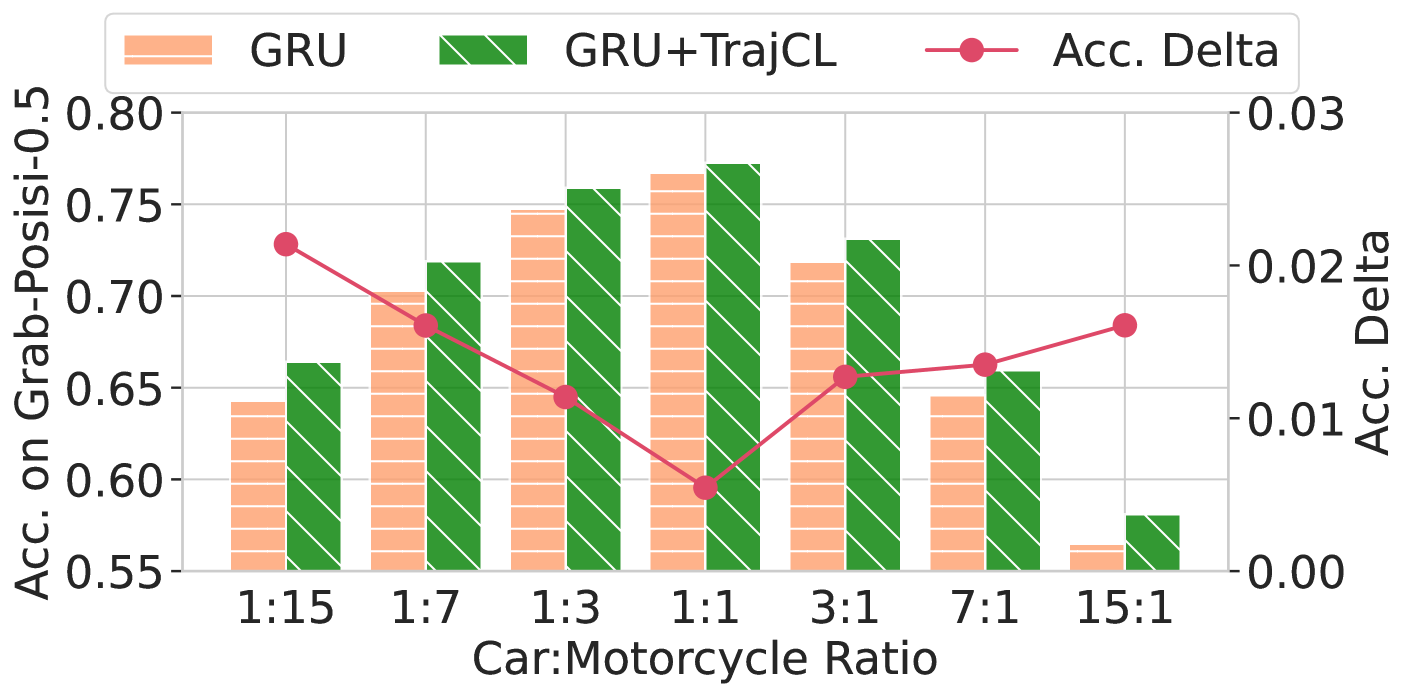
- 不平衡样本学习:通过调整训练集中类别比例,保持测试/验证集不变,以测试模型在不平衡样本条件下的性能。
- 消融研究:
- 通过移除TrajCL框架中的各个组件,来量化每个组件对整体性能的贡献。
- 解释性分析:
- 对环境对齐模块学习到的环境原型进行了可视化分析,以展示模型对不同地理空间上下文的感知能力。
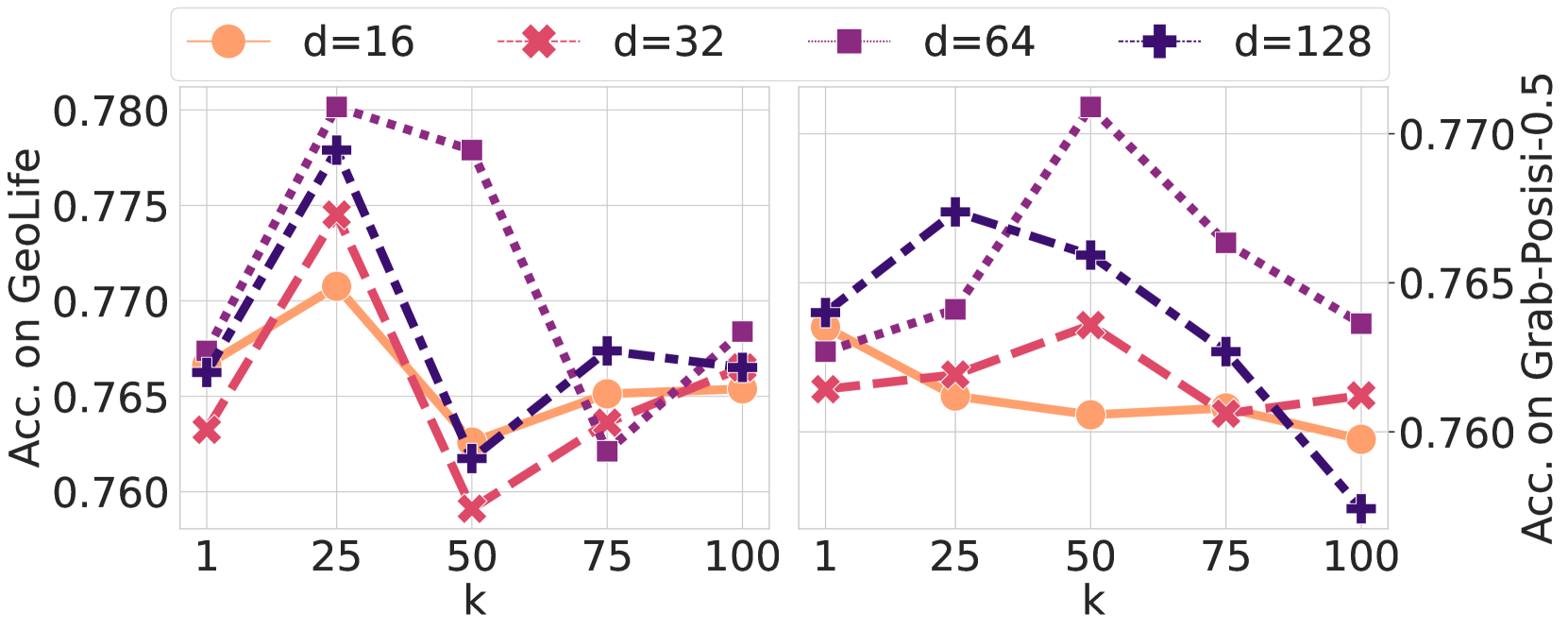
- 超参数影响:
- 研究了环境代码簿大小和隐藏维度对模型性能的影响。
- 更多结果:
- 提供了在其他基线模型上实现TrajCL时在不平衡样本学习场景下的性能结果。
这些实验全面地评估了TrajCL框架在轨迹分类任务上的性能,特别是在面对环境混杂因素时的稳健性和泛化能力。实验结果表明,TrajCL能够有效地提高轨迹表示的稳健性,并且在多种不同的环境条件下都能取得良好的性能。
Q: 总结一下论文的主要内容
A: 这篇论文的主要内容可以总结如下:
- 问题定义:论文针对的是轨迹建模中的一个关键问题,即如何从人类移动性数据中提取有用、泛化和简洁的轨迹表示,同时消除地理空间环境因素带来的混杂效应。
- 因果视角:通过构建结构因果模型(SCM),论文从因果关系的角度分析了轨迹表示学习过程中的变量关系,包括轨迹数据、环境因素和轨迹表示之间的相互作用。
- TrajCL框架:提出了一个基于因果学习的轨迹建模框架TrajCL,该框架利用后门调整理论作为干预工具,通过设计环境对齐模块和因果学习模块,来消除地理空间环境因素与轨迹之间的混杂关联。
- 环境对齐模块:该模块使用地理空间上下文来指导编码器分离因果和混杂表示,包括交叉注意力组件和分离分配组件。
- 因果学习模块:实施了多种策略来实现后门调整,包括分离学习策略、干预学习策略和最终的优化过程。
- 实验验证:在两个真实世界的轨迹数据集上进行了广泛的实验,验证了TrajCL在轨迹分类任务中的性能提升,并展示了其在少数样本学习和不平衡样本学习场景下的优越泛化能力和可解释性。
- 主要贡献:提出了一个新颖的因果视角来增强轨迹表示的稳健性,并通过实验验证了该框架的有效性。
- 未来工作:论文最后提出了一些未来工作的方向,包括扩展TrajCL的适用性以覆盖更多样化的环境,以及将其应用于更多现实的基于轨迹的任务,如旅行时间估计。
**:提出了一个新颖的因果视角来增强轨迹表示的稳健性,并通过实验验证了该框架的有效性。
8. 未来工作:论文最后提出了一些未来工作的方向,包括扩展TrajCL的适用性以覆盖更多样化的环境,以及将其应用于更多现实的基于轨迹的任务,如旅行时间估计。
总体而言,这篇论文通过引入因果学习的方法,为处理轨迹数据中的混杂效应提供了一种新的解决方案,并在理论和实践上都取得了积极的成果。
🌟【紧跟前沿】“时空探索之旅”与你一起探索时空奥秘!🚀
欢迎大家关注时空探索之旅