一.概要
建立场景,给场景内的物体赋予语义,使用Replicator进行分割操作,从而获得带标签信息的mask掩码图,可作为数据集、验证集等训练使用。
二.具体操作步骤
场景部分
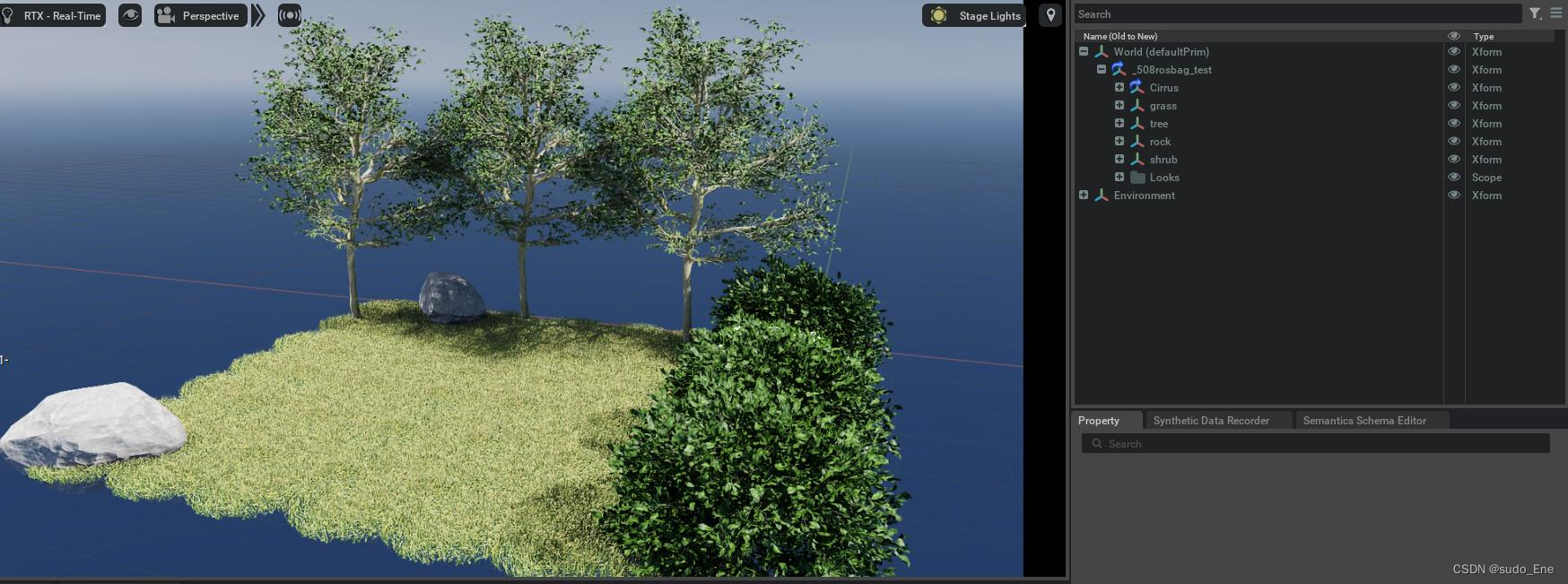
1.搭建一个基础场景
这里建议在搭建的时候就按类别分好类,方便一起赋予语义
如下图,将树木、岩石、灌木、草地的物体都整理好
2.给场景中的物体赋予语义
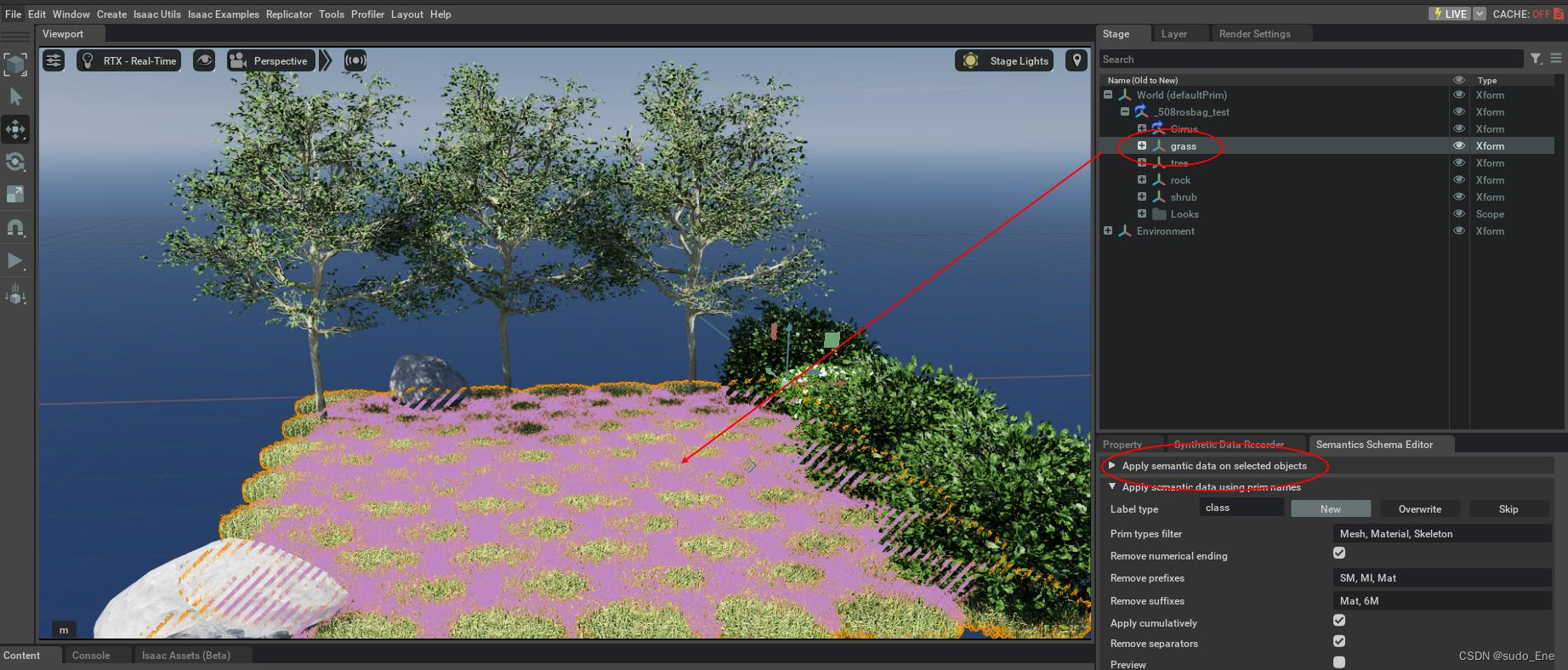
(1)在上方导航栏中,找到Replicator,点击Semantics Schema Editor,如图所示


(2)点击草地这个大类,选中所有的草地,点击Apply semantic data on selected objects
(3)填写类别,填写好后点击下方Add Entry On All Selected Prims,就添加好了
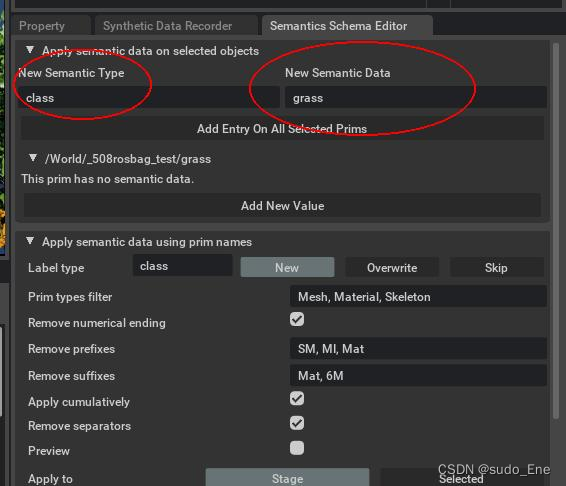
添加好后长这样:
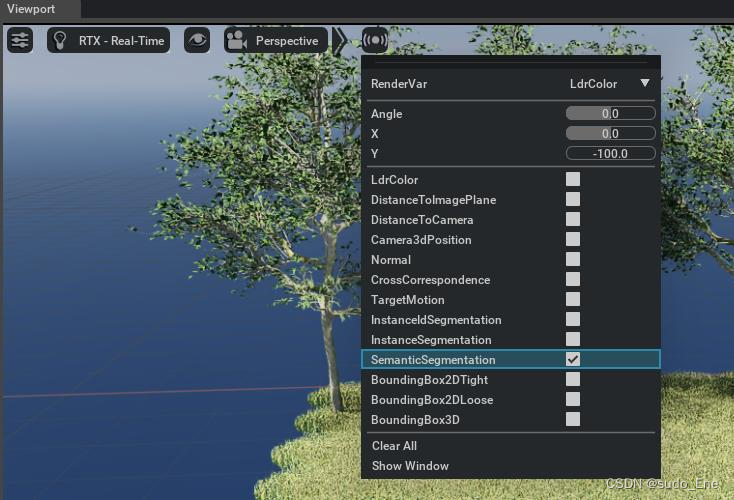
(4)在左上角点击这个家伙

选择语义分割SemanticSegmentation(别的也可以点点看,看一眼结果就知道它是什么东西了)
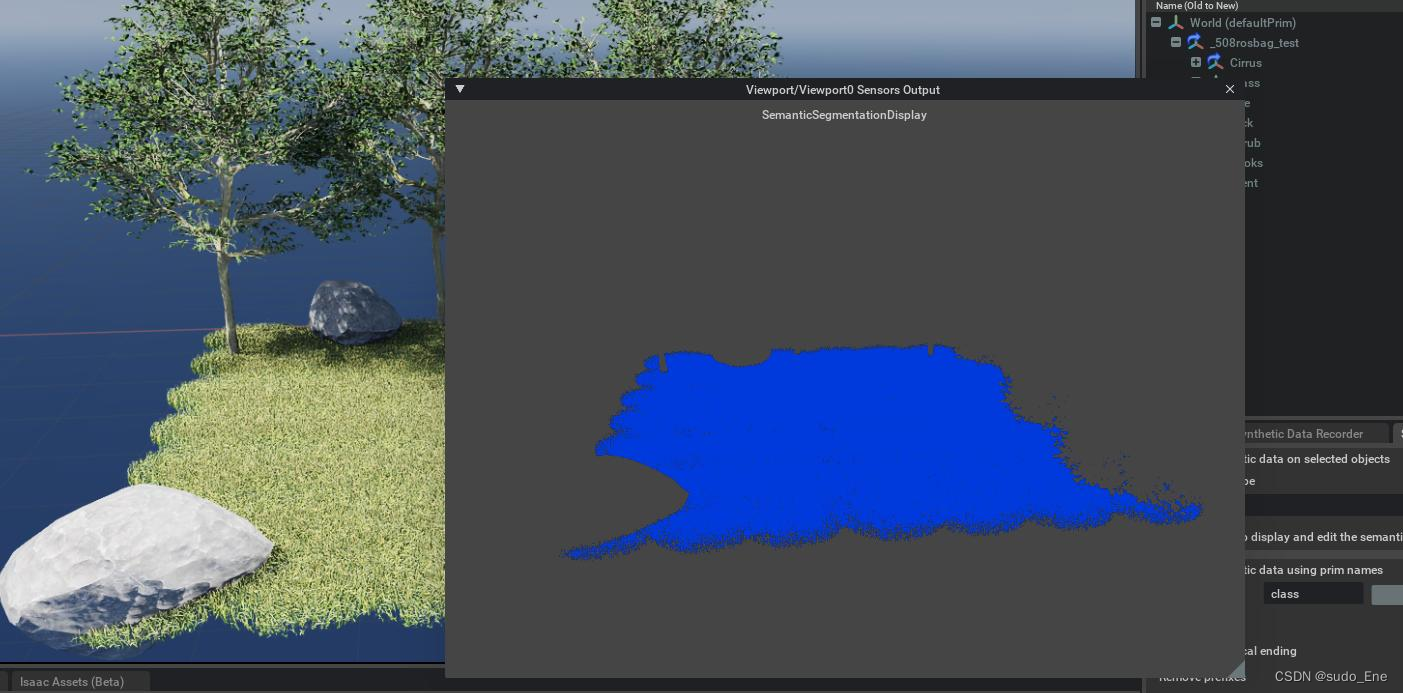
点击下方的Show Window
这个就是草地的语义分割结果了
(5)同理,可以添加其它物体的语义,不举例了就
3.获取语义分割.png格式掩码图片及其.json格式文件
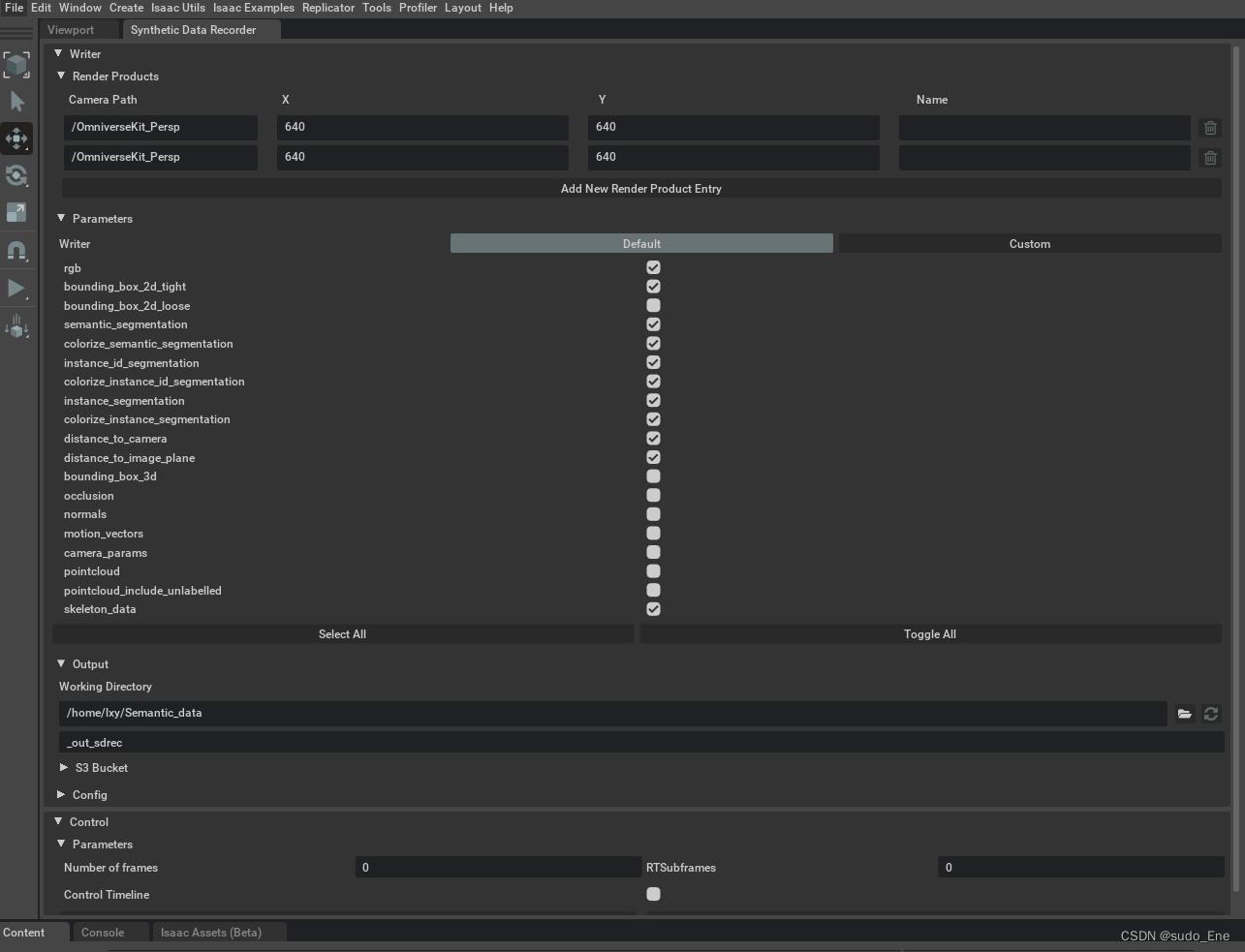
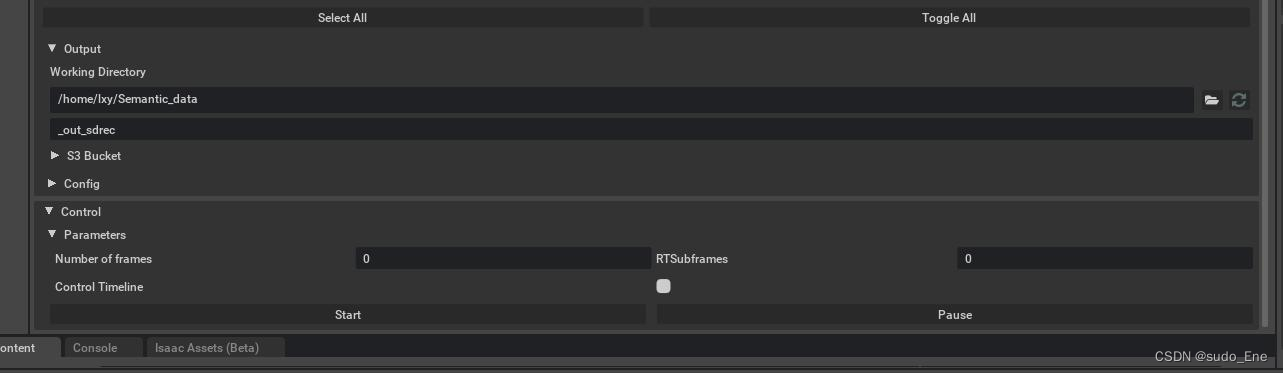
点击上方导航栏中的Replicator,选择Synthetic Data Recorder

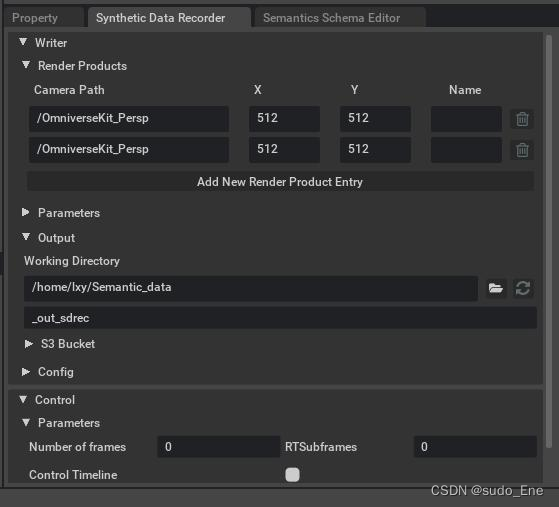
在这里可以设置相机相关参数,要保存的信息,保存路径,系统相关文件路径,
拉至最下方,有Start和Pause,开始录制信息,输出到output路径中。摁下start后,start的位置就会变为stop。点击stop是不会保存信息的,要摁pause才会保存信息。
小车部分
1.小车存在的意义是,可以通过控制小车来获取多角度的图片,可以看我之前的小车速度设置、键盘设置、相机设置、ros设置来,不难
Isaac Sim 4 键盘控制小车前进方向(学习笔记5.8.2)-CSDN博客
Isaac Sim 5 Ros相关(学习笔记5.8.3)-CSDN博客
参考内容
IsaacSim Semantic Segmentation - GrowingPenguin’s Blog
SemanticOcclusionReduction — Omniverse Extensions latest documentation