0、何为仿真
1、为何仿真
- 低成本: 机器人实体一般价格昂贵,为降低机器人学习、调试的成本;
- 高效: 搭建的环境更为多样且灵活,可以提高测试效率以及测试覆盖率;
- 高安全性: 仿真环境下,无需要考虑耗损问题。
2、仿真技术的内容与要求
-
1、【建模】学习如何创建 并 显示机器人模型
- 能够独立使用urdf创建机器人模型,并在Rviz与Gazebo中分别显示;
-
2、【搭建环境】学习如何搭建仿真环境
- 能够使用Gazebo搭建仿真环境;
-
3、【感知环境】学习如何实现机器人模型与仿真环境的交互
- 能够使用机器人模型中的传感器【相机、雷达…】获取仿真环境数据Rviz。
2.0、介绍创建ros包的流程。
2.0.1 创建工作空间【并初始化】
mkdir -p catkin_ws/src // 若创建嵌套文件夹,必须使用 -p,创建单个文件夹则不用cd catkin_ws // 进入该工作空间catkin_make // 初始化工作空间
2.0.2 创建Ros包【使用依赖】
cd src // 进入工作空间的src内catkin_create_pkg ros_test roscpp rospy std_msgs
2.0.3 编写源码
cd catkin_ws/src/ros_test/src编写 src 内的源码文件 ***.cppcd catkin_ws/src/ros_test改写 ros_test 内的 CMakeLists.txt 文件
2.0.4 编译Ros包
cd catkin_wscatkin_make
2.0.5 运行Ros包
// 新开终端,执行
roscore//另一终端执行
ca catkin_ws
source devel/setup.bash
rosrun ros_test ros_test_node // rusrun 包名 节点名
3、 URDF
URDF是 Unified Robot Description Format 的首字母缩写,直译为 统一(标准化)机器人描述格式 ,可以以一种 XML 的方式描述机器人的部分结构,比如底盘、摄像头、激光雷达、机械臂以及不同关节的自由度…,该文件可以被 C++ 内置的解释器转换成可视化的机器人模型,是 ROS 中实现机器人仿真的重要组件。
URDF 不能单独使用,需要结合 Rviz 或 Gazebo,URDF 只是一个文件,需要在 Rviz 或 Gazebo 中渲染成图形化的机器人模型。
4、 URDF 集成 Rviz 流程
1. 准备: 新建功能包,导入依赖;
- 创建一个新的功能包,导入依赖 urdf xacro
// 创建工作空间 并 初始化
mkdir -p catkin_ws/src
cd catkin_ws
catkin_make// 创建功能包 并 导入依赖
cd catkin_ws/src/
catkin_create_pkg ros_test urdf xacro
- 在当前功能包下,再新建几个目录:
-
- urdf:存储urdf文件的目录
-
- meshes:存储机器人模型渲染文件
-
- config:存储配置文件,比如 **.rviz 文件
-
- launch:存储launch启动文件
// 功能包内新建文件夹
cd catkin_ws/src/ros_test
mkdir -p urdf/urdf // 此为创建均为urdf的两层目录,也可以只创建一层urdf目录【双层是为了之后建urdf/xacro】
mkdir meshes
mkdir config
mkdir launch
2.1 核心: 编写【 urdf 文件】 与 launch 文件
// 创建urdf文件,并填入相应内容
cd catkin_ws/src/ros_test/urdf/urdf
gedit urdf01_HelloWorld.urdf// 填入如下内容
<robot name="mycar"><link name="base_link"><visual><geometry><box size="0.5 0.2 0.1" /></geometry></visual></link>
</robot>// 解释urdf文件
一、robot
urdf 中为了保证 xml 语法的完整性,使用了robot标签作为根标签,
所有的 link 和 joint 以及其他标签都必须包含在 robot 标签内,在该标签内可以通过 name 属性设置机器人模型的名称1.属性
name: 指定机器人模型的名称2.子标签其他标签都是子级标签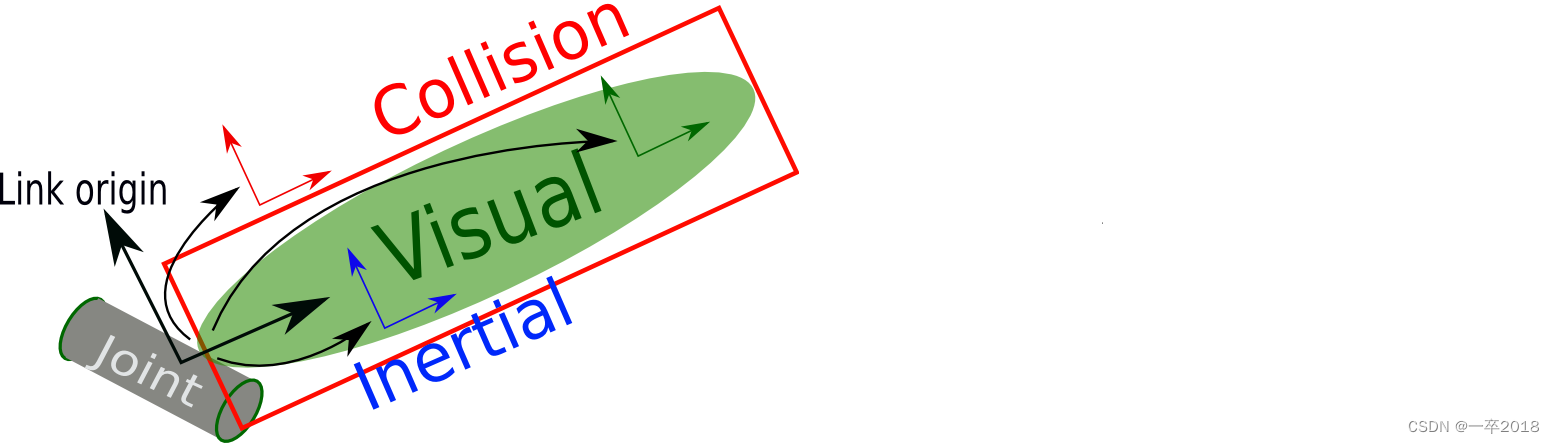
// 解释urdf文件
二、linkurdf 中的 link 标签用于描述机器人某个部件(也即刚体部分)的外观和物理属性,比如: 机器人底座、轮子、激光雷达、摄像头...每一个部件都对应一个 link, 在 link 标签内,可以设计该部件的形状、尺寸、颜色、惯性矩阵、碰撞参数等一系列属性1.属性name ---> 为连杆命名2.子标签visual ---> 描述外观(对应的数据是可视的)geometry 设置连杆的形状标签1: box(盒状)属性:size=长(x) 宽(y) 高(z)标签2: cylinder(圆柱)属性:radius=半径 length=高度标签3: sphere(球体)属性:radius=半径标签4: mesh(为连杆添加皮肤)属性: filename=资源路径(格式:package://<packagename>/<path>/文件)origin 设置偏移量与倾斜弧度属性1: xyz=x偏移 y便宜 z偏移属性2: rpy=x翻滚 y俯仰 z偏航 (单位是弧度)metrial 设置材料属性(颜色)属性: name标签: color属性: rgba=红绿蓝权重值与透明度 (每个权重值以及透明度取值[0,1])collision ---> 连杆的碰撞属性Inertial ---> 连杆的惯性矩阵在此,只演示visual使用。
link 案例
需求:分别生成长方体、圆柱与球体的机器人部件
URDF文件示例如下:
<link name="base_link"><visual><!-- 形状 --><geometry><!-- 长方体的长宽高 --><!-- <box size="0.5 0.3 0.1" /> --><!-- 圆柱,半径和长度 --><!-- <cylinder radius="0.5" length="0.1" /> --><!-- 球体,半径--><!-- <sphere radius="0.3" /> --></geometry><!-- xyz坐标 rpy翻滚俯仰与偏航角度(3.14=180度 1.57=90度) --><origin xyz="0 0 0" rpy="0 0 0" /><!-- 颜色: r=red g=green b=blue a=alpha --><material name="black"><color rgba="0.7 0.5 0 0.5" /></material></visual></link>
// 解释urdf文件
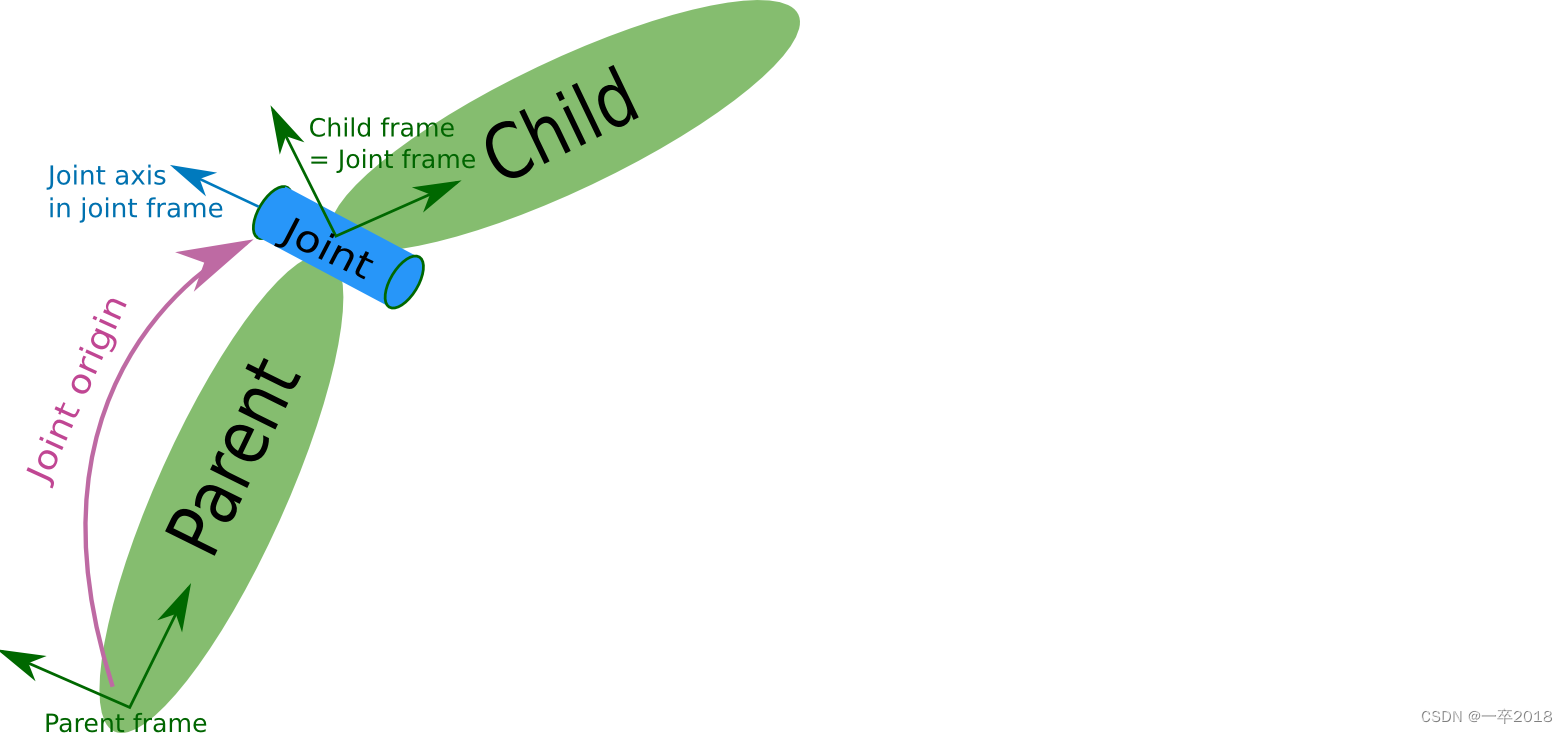
三、jointurdf 中的 joint 标签用于描述机器人关节的运动学和动力学属性,还可以指定关节运动的安全极限,机器人的两个部件(分别称之为 parent link 与 child link)以"关节"的形式相连接,不同的关节有不同的运动形式: 旋转、滑动、固定、旋转速度、旋转角度限制....,比如:安装在底座上的轮子可以360度旋转,而摄像头则可能是完全固定在底座上。joint标签对应的数据在模型中是不可见的
1.属性name ---> 为关节命名type ---> 关节运动形式continuous: 旋转关节,可以绕单轴无限旋转revolute: 旋转关节,类似于 continues,但是有旋转角度限制prismatic: 滑动关节,沿某一轴线移动的关节,有位置极限planer: 平面关节,允许在平面正交方向上平移或旋转floating: 浮动关节,允许进行平移、旋转运动fixed: 固定关节,不允许运动的特殊关节2.子标签parent(必需的)parent link的名字是一个强制的属性:link:父级连杆的名字,是这个link在机器人结构树中的名字。child(必需的)child link的名字是一个强制的属性:link:子级连杆的名字,是这个link在机器人结构树中的名字。origin属性: xyz=各轴线上的偏移量 rpy=各轴线上的偏移弧度。axis属性: xyz用于设置围绕哪个关节轴运动。
joint 案例
需求:创建机器人模型,底盘为长方体,在长方体的前面添加一摄像头,摄像头可以沿着 Z 轴 360 度旋转。
URDF文件示例如下:
<!-- 需求: 创建机器人模型,底盘为长方体,在长方体的前面添加一摄像头,摄像头可以沿着 Z 轴 360 度旋转-->
<robot name="mycar"><!-- 底盘 --><link name="base_link"><visual><geometry><box size="0.5 0.2 0.1" /></geometry><origin xyz="0 0 0" rpy="0 0 0" /><material name="blue"><color rgba="0 0 1.0 0.5" /></material></visual></link><!-- 摄像头 --><link name="camera"><visual><geometry><box size="0.02 0.05 0.05" /></geometry><origin xyz="0 0 0" rpy="0 0 0" /><material name="red"><color rgba="1 0 0 0.5" /></material></visual></link><!-- 关节 --><joint name="camera2baselink" type="continuous"><parent link="base_link"/><child link="camera" /><!-- 需要计算两个 link 的物理中心之间的偏移量 --><origin xyz="0.2 0 0.075" rpy="0 0 0" /><axis xyz="0 0 1" /></joint></robot>2.2 核心: 编写 urdf 与【 launch 文件】
编写launch文件, launch文件示例如下:
cd launch
gedit
<launch><param name="robot_description" textfile="$(find urdf_rviz_demo)/urdf/urdf/urdf03_joint.urdf" /><node pkg="rviz" type="rviz" name="rviz" args="-d $(find urdf_rviz_demo)/config/helloworld.rviz" /> <!-- 添加关节状态发布节点 --><node pkg="joint_state_publisher" type="joint_state_publisher" name="joint_state_publisher" /><!-- 添加机器人状态发布节点 --><node pkg="robot_state_publisher" type="robot_state_publisher" name="robot_state_publisher" /><!-- 可选:用于控制关节运动的节点 --><node pkg="joint_state_publisher_gui" type="joint_state_publisher_gui" name="joint_state_publisher_gui" /></launch>
3. 核心: 在launch文件集成URDF与Rviz;
- 在 launch 目录下,新建一个launch文件,该 launch 文件需要启动 Rviz,并导入 urdf 文件【此处的包名应为 ros_test】,Rviz 启动后可以自动载入解析urdf文件,并显示机器人模型,核心问题:如何导入 urdf 文件? 在 ROS 中,可以将 urdf 文件的路径设置到参数服务器,使用的参数名是:robot_description,示例代码如下:
cd catkin_ws/src/ros_test/launch
gedit urdf01_HelloWorld.launch
// 填入如下内容
<launch><!-- 设置参数 --><param name="robot_description" textfile="$(find 包名)/urdf/urdf/urdf01_HelloWorld.urdf" /><!-- 启动 rviz --><node pkg="rviz" type="rviz" name="rviz" /></launch>
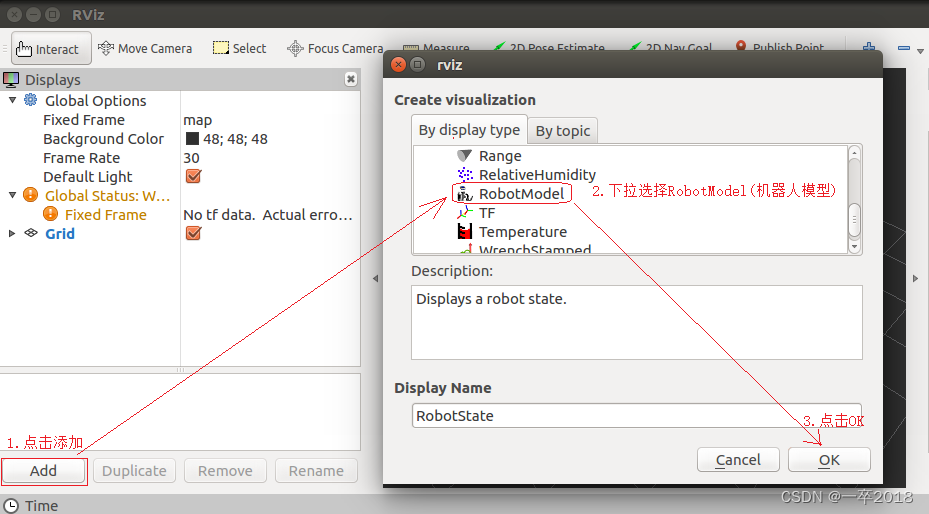
4. 1 显示: 在Rviz中显示机器人模型。
roslaunch ros_test urdf01_HelloWorld.launch
- rviz 启动后,会发现并没有盒装的机器人模型,这是因为默认情况下没有添加机器人显示组件,需要手动添加,添加方式如下:
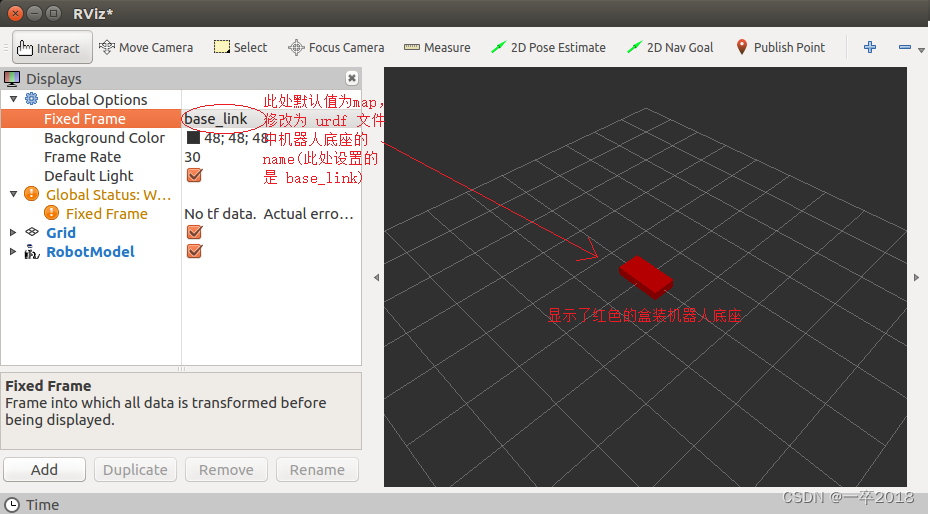
设置完毕后,可以正常显示了
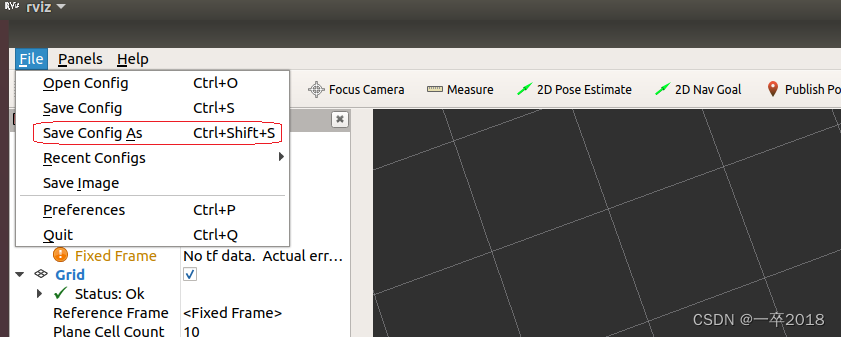
4. 2.优化 rviz 启动
-
重复启动launch文件时,Rviz 之前的组件配置信息不会自动保存,需要重复执行步骤4的操作,为了方便使用,可以使用如下方式优化:
-
首先,将当前配置保存进config目录
// 在当前路径下:
catkin_ws/src/ros_test/config/
// 保存rivz配置文件
show_mycar.rviz
- 然后,urdf01_HelloWorld.launch文件中 Rviz 的启动配置添加参数:args,值设置为-d 配置文件路径
<launch><param name="robot_description" textfile="$(find 包名)/urdf/urdf/urdf01_HelloWorld.urdf" /><node pkg="rviz" type="rviz" name="rviz" args="-d $(find 报名)/config/rviz/show_mycar.rviz" />
</launch>- 最后再启动时,就可以包含之前的组件配置了,使用更方便快捷。
5、 xacro 集成Rviz【单个xacro文件】
// 创建工作空间 并 初始化
mkdir -p catkin_ws/src
cd catkin_ws
catkin_make// 创建ros功能包
cd catkin_ws/src
catkin_create_pkg demo_pkg urdf xacro// 功能包内创建多个文件夹
cd catkin_ws/src/demo_pkg
mkdir -p urdf/xacro
mkdir launch
mkdir configcd urdf/xacro
gedit my_car.urdf.xacro
// 填入如下内容
<robot name="my_base" xmlns:xacro="http://www.ros.org/wiki/xacro"><!----><xacro:property name="PI" value="3.141"/><!-- --><material name="black"><color rgba="0.0 0.0 0.0 1.0" /></material><!-- --><xacro:property name="base_footprint_radius" value="0.001" /> <!-- base_footprint --><xacro:property name="base_link_radius" value="0.1" /> <!-- base_link --><xacro:property name="base_link_length" value="0.08" /> <!-- base_link --><xacro:property name="earth_space" value="0.015" /> <!-- --><!-- --><link name="base_footprint"><visual><geometry><sphere radius="${base_footprint_radius}" /></geometry></visual></link><link name="base_link"><visual><geometry><cylinder radius="${base_link_radius}" length="${base_link_length}" /></geometry><origin xyz="0 0 0" rpy="0 0 0" /><material name="yellow"><color rgba="0.5 0.3 0.0 0.5" /></material></visual></link><joint name="base_link2base_footprint" type="fixed"><parent link="base_footprint" /><child link="base_link" /><origin xyz="0 0 ${earth_space + base_link_length / 2 }" /></joint><!-- --><!-- --><xacro:property name="wheel_radius" value="0.0325" /><!-- --><xacro:property name="wheel_length" value="0.015" /><!-- --><!-- --><xacro:macro name="add_wheels" params="name flag"><link name="${name}_wheel"><visual><geometry><cylinder radius="${wheel_radius}" length="${wheel_length}" /></geometry><origin xyz="0.0 0.0 0.0" rpy="${PI / 2} 0.0 0.0" /><material name="black" /></visual></link><joint name="${name}_wheel2base_link" type="continuous"><parent link="base_link" /><child link="${name}_wheel" /><origin xyz="0 ${flag * base_link_radius} ${-(earth_space + base_link_length / 2 - wheel_radius) }" /><axis xyz="0 1 0" /></joint></xacro:macro><xacro:add_wheels name="left" flag="1" /><xacro:add_wheels name="right" flag="-1" /><!-- --><!-- --><xacro:property name="support_wheel_radius" value="0.0075" /> <!-- --><!-- --><xacro:macro name="add_support_wheel" params="name flag" ><link name="${name}_wheel"><visual><geometry><sphere radius="${support_wheel_radius}" /></geometry><origin xyz="0 0 0" rpy="0 0 0" /><material name="black" /></visual></link><joint name="${name}_wheel2base_link" type="continuous"><parent link="base_link" /><child link="${name}_wheel" /><origin xyz="${flag * (base_link_radius - support_wheel_radius)} 0 ${-(base_link_length / 2 + earth_space / 2)}" /><axis xyz="1 1 1" /></joint></xacro:macro><xacro:add_support_wheel name="front" flag="1" /><xacro:add_support_wheel name="back" flag="-1" /></robot>cd launch
gedit my_car.launch
// 填入如下内容
<launch><param name="robot_description" command="$(find xacro)/xacro $(find demo64)/urdf/xacro/my_car.urdf.xacro" /><node pkg="rviz" type="rviz" name="rviz" /><node pkg="joint_state_publisher" type="joint_state_publisher" name="joint_state_publisher" output="screen" /><node pkg="robot_state_publisher" type="robot_state_publisher" name="robot_state_publisher" output="screen" /><node pkg="joint_state_publisher_gui" type="joint_state_publisher_gui" name="joint_state_publisher_gui" output="screen" />
</launch>
// 进入工作空间内进行编译
cd catkin_ws
catkin_make// 执行权限
source devel/setup.bash// 启动launch文件
roslaunch demo_pkg my_car.launch// Rviz启动后,将对Rviz界面进行设置【同上面】,设置好后将其保存进config文件夹内,命名my_car.rviz// 修改my_car.launch
// 修改如下:指定了Rviz的路径<launch><param name="robot_description" command="$(find xacro)/xacro $(find demo64)/urdf/xacro/my_car.urdf.xacro"/><node pkg="rviz" type="rviz" name="rviz" args="-d $(find demo64)/config/demo64.rviz"/><node pkg="joint_state_publisher" type="joint_state_publisher" name="joint_state_publisher" output="screen" /><node pkg="robot_state_publisher" type="robot_state_publisher" name="robot_state_publisher" output="screen" /><node pkg="joint_state_publisher_gui" type="joint_state_publisher_gui" name="joint_state_publisher_gui" output="screen" />
</launch>
// 再次启动launch文件
roslaunch demo_pkg my_car.launch// 会看到模型就在打开的Rviz界面内。
6、 xacro 集成Rviz【多个xacro文件】
// 创建工作空间 并 初始化
mkdir -p catkin_ws/src
cd catkin_ws
catkin_make// 创建ros功能包
cd catkin_ws/src
catkin_create_pkg demo_pkg urdf xacro// 功能包内创建多个文件夹
cd catkin_ws/src/demo_pkg
mkdir -p urdf/xacro
mkdir launch
mkdir configcd urdf/xacro// 此处需要创建多个xacro文件gedit my_car.urdf.xacrogedit my_camrea.urdf.xacrogedit my_laser.urdf.xacrogedit my_car_camera_laser.urdf.xacro
// 分别填入如下内容
<!-- my_car.urdf.xacro -->
<robot name="my_base" xmlns:xacro="http://www.ros.org/wiki/xacro"><!----><xacro:property name="PI" value="3.141"/><!-- --><material name="black"><color rgba="0.0 0.0 0.0 1.0" /></material><!-- --><xacro:property name="base_footprint_radius" value="0.001" /> <!-- base_footprint --><xacro:property name="base_link_radius" value="0.1" /> <!-- base_link --><xacro:property name="base_link_length" value="0.08" /> <!-- base_link --><xacro:property name="earth_space" value="0.015" /> <!-- --><!-- --><link name="base_footprint"><visual><geometry><sphere radius="${base_footprint_radius}" /></geometry></visual></link><link name="base_link"><visual><geometry><cylinder radius="${base_link_radius}" length="${base_link_length}" /></geometry><origin xyz="0 0 0" rpy="0 0 0" /><material name="yellow"><color rgba="0.5 0.3 0.0 0.5" /></material></visual></link><joint name="base_link2base_footprint" type="fixed"><parent link="base_footprint" /><child link="base_link" /><origin xyz="0 0 ${earth_space + base_link_length / 2 }" /></joint><!-- --><!-- --><xacro:property name="wheel_radius" value="0.0325" /><!-- --><xacro:property name="wheel_length" value="0.015" /><!-- --><!-- --><xacro:macro name="add_wheels" params="name flag"><link name="${name}_wheel"><visual><geometry><cylinder radius="${wheel_radius}" length="${wheel_length}" /></geometry><origin xyz="0.0 0.0 0.0" rpy="${PI / 2} 0.0 0.0" /><material name="black" /></visual></link><joint name="${name}_wheel2base_link" type="continuous"><parent link="base_link" /><child link="${name}_wheel" /><origin xyz="0 ${flag * base_link_radius} ${-(earth_space + base_link_length / 2 - wheel_radius) }" /><axis xyz="0 1 0" /></joint></xacro:macro><xacro:add_wheels name="left" flag="1" /><xacro:add_wheels name="right" flag="-1" /><!-- --><!-- --><xacro:property name="support_wheel_radius" value="0.0075" /> <!-- --><!-- --><xacro:macro name="add_support_wheel" params="name flag" ><link name="${name}_wheel"><visual><geometry><sphere radius="${support_wheel_radius}" /></geometry><origin xyz="0 0 0" rpy="0 0 0" /><material name="black" /></visual></link><joint name="${name}_wheel2base_link" type="continuous"><parent link="base_link" /><child link="${name}_wheel" /><origin xyz="${flag * (base_link_radius - support_wheel_radius)} 0 ${-(base_link_length / 2 + earth_space / 2)}" /><axis xyz="1 1 1" /></joint></xacro:macro><xacro:add_support_wheel name="front" flag="1" /><xacro:add_support_wheel name="back" flag="-1" /></robot><!-- my_camrea.urdf.xacro -->
<robot name="my_camera" xmlns:xacro="http://wiki.ros.org/xacro"><!-- --><xacro:property name="camera_length" value="0.01" /> <!-- (x) --><xacro:property name="camera_width" value="0.025" /> <!-- (y) --><xacro:property name="camera_height" value="0.025" /> <!-- (z) --><xacro:property name="camera_x" value="0.08" /> <!-- --><xacro:property name="camera_y" value="0.0" /> <!-- --><xacro:property name="camera_z" value="${base_link_length / 2 + camera_height / 2}" /> <!-- --><!-- --><link name="camera"><visual><geometry><box size="${camera_length} ${camera_width} ${camera_height}" /></geometry><origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0" /><material name="black" /></visual></link><joint name="camera2base_link" type="fixed"><parent link="base_link" /><child link="camera" /><origin xyz="${camera_x} ${camera_y} ${camera_z}" /></joint>
</robot><!-- my_laser.urdf.xacro -->
<robot name="my_laser" xmlns:xacro="http://wiki.ros.org/xacro"><!-- --><xacro:property name="support_length" value="0.15" /> <!-- --><xacro:property name="support_radius" value="0.01" /> <!-- --><xacro:property name="support_x" value="0.0" /> <!-- --><xacro:property name="support_y" value="0.0" /> <!-- --><xacro:property name="support_z" value="${base_link_length / 2 + support_length / 2}" /> <!-- --><link name="support"><visual><geometry><cylinder radius="${support_radius}" length="${support_length}" /></geometry><origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0" /><material name="red"><color rgba="0.8 0.2 0.0 0.8" /></material></visual></link><joint name="support2base_link" type="fixed"><parent link="base_link" /><child link="support" /><origin xyz="${support_x} ${support_y} ${support_z}" /></joint><!-- --><xacro:property name="laser_length" value="0.05" /> <!-- --><xacro:property name="laser_radius" value="0.03" /> <!-- --><xacro:property name="laser_x" value="0.0" /> <!-- --><xacro:property name="laser_y" value="0.0" /> <!-- --><xacro:property name="laser_z" value="${support_length / 2 + laser_length / 2}" /> <!-- --><!-- --><link name="laser"><visual><geometry><cylinder radius="${laser_radius}" length="${laser_length}" /></geometry><origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0" /><material name="black" /></visual></link><joint name="laser2support" type="fixed"><parent link="support" /><child link="laser" /><origin xyz="${laser_x} ${laser_y} ${laser_z}" /></joint>
</robot><!-- my_car_camera_laser.urdf.xacro -->
<robot name="my_car_camera_laser" xmlns:xacro="http://wiki.ros.org/xacro"><xacro:include filename="my_car.urdf.xacro" /><xacro:include filename="my_camera.urdf.xacro" /><xacro:include filename="my_laser.urdf.xacro" /></robot>
cd launch
gedit my_car_camera_laser.launch
// 填入如下内容
<launch><param name="robot_description" command="$(find xacro)/xacro $(find demo_pkg)/urdf/xacro/my_car_camera_laser.urdf.xacro" /><node pkg="rviz" type="rviz" name="rviz" /><node pkg="joint_state_publisher" type="joint_state_publisher" name="joint_state_publisher" output="screen" /><node pkg="robot_state_publisher" type="robot_state_publisher" name="robot_state_publisher" output="screen" /><node pkg="joint_state_publisher_gui" type="joint_state_publisher_gui" name="joint_state_publisher_gui" output="screen" />
</launch>
// 进入工作空间内进行编译
cd catkin_ws
catkin_make// 执行权限
source devel/setup.bash// 启动launch文件
roslaunch demo_pkg my_car_camera_laser.launch// Rviz启动后,将对Rviz界面进行设置【同上面】,设置好后将其保存进config文件夹内,命名my_car_camera_laser.rviz
config/my_car_camera_laser.rviz// 修改my_car.launch
// 修改如下:指定了Rviz的路径<launch><param name="robot_description" command="$(find xacro)/xacro $(find demo_pkg)/urdf/xacro/my_car_camera_laser.urdf.xacro"/><node pkg="rviz" type="rviz" name="rviz" args="-d $(find demo_pkg)/config/my_car_camera_laser.rviz"/><node pkg="joint_state_publisher" type="joint_state_publisher" name="joint_state_publisher" output="screen" /><node pkg="robot_state_publisher" type="robot_state_publisher" name="robot_state_publisher" output="screen" /><node pkg="joint_state_publisher_gui" type="joint_state_publisher_gui" name="joint_state_publisher_gui" output="screen" />
</launch>
// 再次启动launch文件
roslaunch demo_pkg my_car_camera_laser.launch// 会看到模型就在打开的Rviz界面内。
7、URDF 集成Gazebo
URDF 与 Gazebo 集成流程与 Rviz 实现类似,主要步骤如下:
1. 创建功能包,导入依赖项
2. 编写 URDF 或 Xacro 文件
3. 启动 Gazebo 并显示机器人模型
7.1 创建功能包
创建新功能包,导入依赖包: urdf、xacro、gazebo_ros、gazebo_ros_control、gazebo_plugins
// 创建工作空间 并 初始化
mkdir -p catkin_ws/src
cd catkin_ws
catkin_make// 创建Ros功能包 并 导入依赖
cd catkin_ws/src
catkin_create_pkg demo_pkg urdf xacro gazebo_ros gazebo_ros_control gazebo_plugins
7.2 编写URDF文件
// 新建功能包内的文件夹
mkdir urdf
mkdir launch
mkdir configcd urdf
gedit urdf01_helloworld.urdf
// 填入如下内容
<!-- 创建一个机器人模型(盒状即可),显示在 Gazebo 中
--><robot name="mycar"><link name="base_link"><visual><geometry><box size="0.5 0.2 0.1" /></geometry><origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0" /><material name="yellow"><color rgba="0.5 0.3 0.0 1" /></material></visual><collision><geometry><box size="0.5 0.2 0.1" /></geometry><origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0" /></collision><inertial><origin xyz="0 0 0" /><mass value="6" /><inertia ixx="1" ixy="0" ixz="0" iyy="1" iyz="0" izz="1" /></inertial></link><gazebo reference="base_link"><material>Gazebo/Blue</material></gazebo></robot>注意, 当 URDF 需要与 Gazebo 集成时,和 Rviz 有明显区别:
1.必须使用 collision 标签,因为既然是仿真环境,那么必然涉及到碰撞检测,collision 提供碰撞检测的依据。
2.必须使用 inertial 标签,此标签标注了当前机器人某个刚体部分的惯性矩阵,用于一些力学相关的仿真计算。
3.颜色设置,也需要重新使用 gazebo 标签标注,因为之前的颜色设置为了方便调试包含透明度,仿真环境下没有此选项。
7.3 启动Gazebo并显示模型
cd launch
gedit urdf01_helloworld.launch
// 填入如下内容
<launch><!-- 将 Urdf 文件的内容加载到参数服务器 --><param name="robot_description" textfile="$(find demo02_urdf_gazebo)/urdf/urdf01_helloworld.urdf" /><!-- 启动 gazebo --><include file="$(find gazebo_ros)/launch/empty_world.launch" /><!-- 在 gazebo 中显示机器人模型 --><node pkg="gazebo_ros" type="spawn_model" name="model" args="-urdf -model mycar -param robot_description" />
</launch><!-- 代码解释:--><include file="$(find gazebo_ros)/launch/empty_world.launch" />
<!-- 启动 Gazebo 的仿真环境,当前环境为空环境 --><node pkg="gazebo_ros" type="spawn_model" name="model" args="-urdf -model mycar -param robot_description" /><!-- 在 Gazebo 中加载一个机器人模型,该功能由 gazebo_ros 下的 spawn_model 提供:-urdf 加载的是 urdf 文件-model mycar 模型名称是 mycar-param robot_description 从参数 robot_description 中载入模型-x 模型载入的 x 坐标-y 模型载入的 y 坐标-z 模型载入的 z 坐标
-->
8、xacro 集成Gazebo
在 ctrl+c 退出gazebo时,出现killed

再次启动roslaunch时,就会报如下错误:
翻译过来的意思就是说:
“执行XXX/gzserver 时进程挂掉,程序退出;
执行XXX/gzclient 时进程挂掉,程序退出。”
根据报错解释可以确定,主要是gazebo在之前的操作中打开过,而没有完全的关闭,使用ctrl+c仅关闭了了gazebo的gui界面,并没有完全关闭gazebo。
解决方法:终端执行 killall gzserver && killall gzclient
// 解决方法---输入如下指令:
killall gzserver && killall gzclient
[gazebo-1] process has died [pid 108415, exit code 255, cmd /opt/ros/melodic/lib/gazebo_ros/gzserver -e ode /home/hzx/hzx_ws/demo_gazebo_ws/src/demo_gazebo/world/box_house.world __name:=gazebo __log:=/home/hzx/.ros/log/fd9008b8-0d3a-11ef-9a38-000c29915674/gazebo-1.log].
log file: /home/hzx/.ros/log/fd9008b8-0d3a-11ef-9a38-000c29915674/gazebo-1*.log[gazebo_gui-2] process has died [pid 108418, exit code 134, cmd /opt/ros/melodic/lib/gazebo_ros/gzclient __name:=gazebo_gui __log:=/home/hzx/.ros/log/fd9008b8-0d3a-11ef-9a38-000c29915674/gazebo_gui-2.log].
log file: /home/hzx/.ros/log/fd9008b8-0d3a-11ef-9a38-000c29915674/gazebo_gui-2*.log
8.1
报如下错误:Error [Converter.cc:151] Unable to convert from SDF version 1.7 to 1.6
翻译过来的意思就是说:
“无法将SDF的版本从1.7转成1.6”
根据报错解释可以确定在执行world.launch 文件时出现了错误,通过查看world.launch文件,发现启动该launch文件时调用了如下三个文件:。

具体三个文件如下:
1、my_car_camera_laser.urdf.xacro
2、empty_world.launch
3、box_house.world通过逐个文件排查,发现是 3、box_house.world 文件存在问题,

解决方法:将box_house.world中的 1.7 改写成 1.6 就可以正常启动了。

报如下错误:UnicodeEncodeError: ‘ascii’ codec can’t encode characters in position 7323-7324: ordinal not in range(128)
翻译过来的意思就是说:
“Unicode编码错误:“ascii”编解码器无法对位置7323-7324中的字符进行编码:序号不在范围内(128)”
根据报错解释可以确定,在启动 my_sensors_car_camera_laser.launch文件时需要调用一些xacro文件,这些文件中应该是存在中文,导致编码错误。 ubuntu18.04 melodic版本中一般使用python2.7环境,该环境下urdf文件中不能有中文注释出现,否则报错
解决方法一:将调用的xacro文件中的中文全部去掉即可。

解决方法二:进行一些设置,可以避免报 error,但会引入其他问题【引入的问题不影响启动xacro文件】参考链接在此。
// urdf文件不注释阅读起来很麻烦,可以通过如下解决:// cd到根目录下cd /opt/ros/melodic/lib/python2.7/dist-packages sudo gedit sitecustomize.py// 在其中添加如下内容:#coding=utf8import sysreload(sys)sys.setdefaultencoding('utf8')
// 引入的问题如下:
Error in sitecustomize; set PYTHONVERBOSE for traceback:
NameError: name 'reload' is not defined
Error in sitecustomize; set PYTHONVERBOSE for traceback:
NameError: name 'reload' is not defined// 不影响启动 xacro 文件,介意者可以选择方法一。

9、载入

100、ROS过程中的错误
1. RLException: multiple files named XXX
hzx@vm:~/hzx_ws/demo_gazebo_ws$ roslaunch demo_gazebo my_sensors_car_camera_laser.urdf.xacro
RLException: multiple files named [my_sensors_car_camera_laser.urdf.xacro] in package [demo_gazebo]:
- /home/hzx/hzx_ws/demo_gazebo_ws/src/demo_gazebo/urdf/xacro/my_sensors_car_camera_laser.urdf.xacro
- /home/hzx/hzx_ws/demo_gazebo_ws/src/demo_gazebo/launch/my_sensors_car_camera_laser.urdf.xacro
Please specify full path instead
The traceback for the exception was written to the log file
翻译过来的意思就是说:
“报了一个RLException错误,在【demo_gazebo】功能包内,有多个叫做【my_sensors_car_camera_laser.urdf.xacro】的文件,
并且之后也给你指出了这重名文件的各个路径。”
根据报错解释可以明显的发现问题所在,直接修改重名文件即可。
2、RLException: Invalid roslaunch XML syntax: no root < launch> tag
hzx@vm:~/hzx_ws/demo_gazebo_ws$ roslaunch demo_gazebo my_sensors_car_camera_laser.urdf.xacro
... logging to /home/hzx/.ros/log/fd9008b8-0d3a-11ef-9a38-000c29915674/roslaunch-vm-110873.log
Checking log directory for disk usage. This may take a while.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.RLException: Invalid roslaunch XML syntax: no root <launch> tag
The traceback for the exception was written to the log file
翻译过来的意思就是说:
“ 报了一个RLException错误,无效的roslaunch XML语法:没有根< launch>标记 ”
根据报错解释可以明显的发现问题所在,执行roslaunch时,选定的launch文件有问题,一看确实有问题,修改launch文件就好了。
3、RLException: [my_sensors_car_camera_laser.launch] is neither a launch
报如下错误:RLException: [my_sensors_car_camera_laser.launch] is neither a launch file in package [demo_gazebo] nor is [demo_gazebo] a launch file name
翻译过来的意思就是说:
“XXX.launch 既不是demo_gazebo 功能包内的launch文件,也不是demo_gazebo 功能包内的launch文件名”
根据报错解释可以确定,此刻并未将devel/setup.bash添加到系统。

解决方法:进入工作空间,执行source,具体如下:
hzx@vm:~/hzx_ws/demo_gazebo_ws$ source devel/setup.bash 第三
第
5号大小