【C语言/Python】嵌入式常用数据滤波处理:卡尔曼滤波器的简易实现方式(Kalman Filter)
文章目录
- 卡尔曼滤波
- 卡尔曼滤波公式
- 卡尔曼滤波数据处理效果
- C语言的卡尔曼滤波实现
- 附录:压缩字符串、大小端格式转换
- 压缩字符串
- 浮点数
- 压缩Packed-ASCII字符串
卡尔曼滤波
卡尔曼滤波适用于在正态分布的情况下 处理数据抖动的问题 常用于温度传感器、加速度传感器等数据滤波处理
这里简单介绍下:
具体关于卡尔曼滤波网上资料很多 这里就不多做介绍
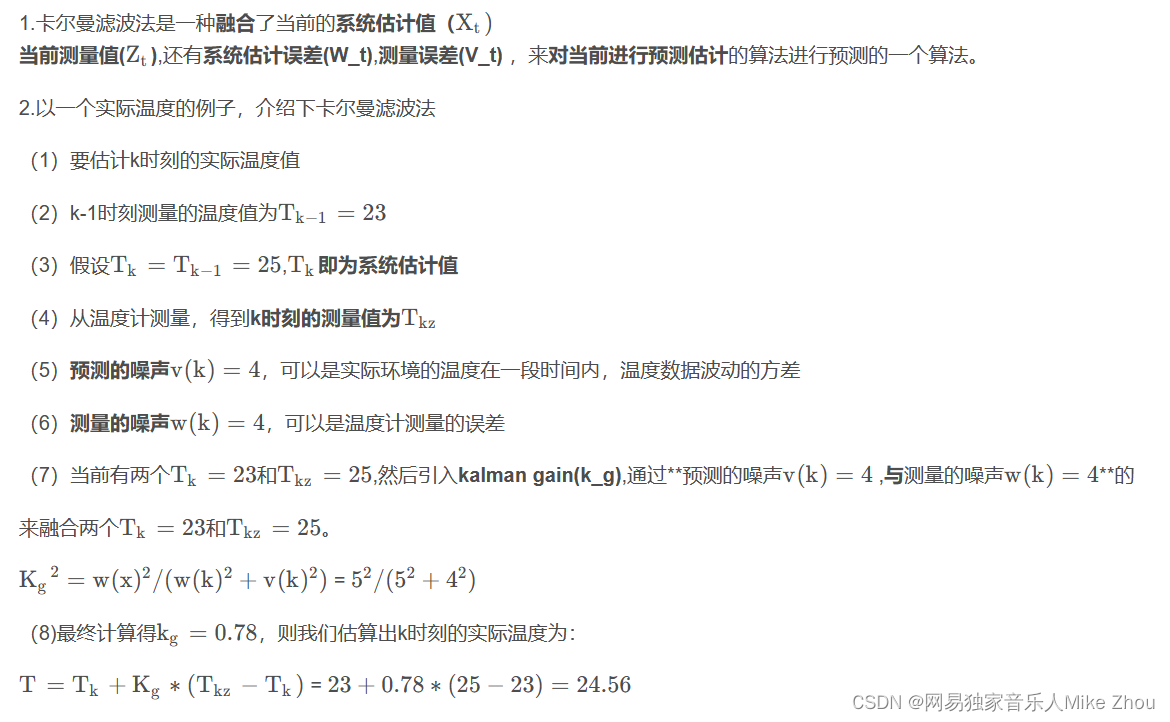
一点:卡尔曼滤波能有效减小系统方差
卡尔曼滤波公式
卡尔曼滤波数据处理效果
我用ADXL345采集了一组数据
然后用Python进行卡尔曼滤波处理
代码如下:
import matplotlib.pyplot as plt"""
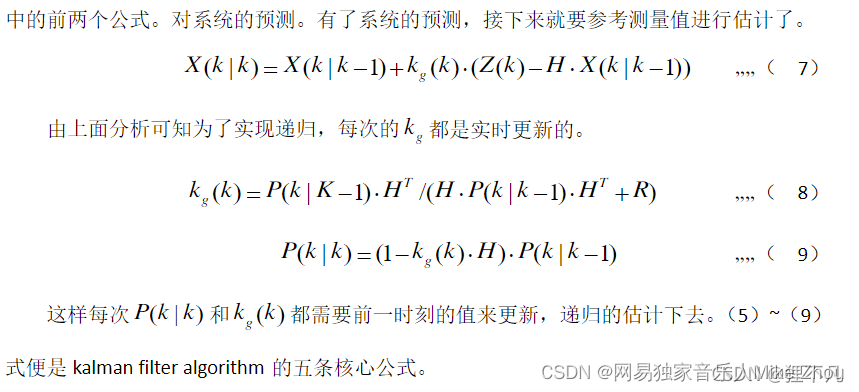
Q 系统噪声
R 测量噪声
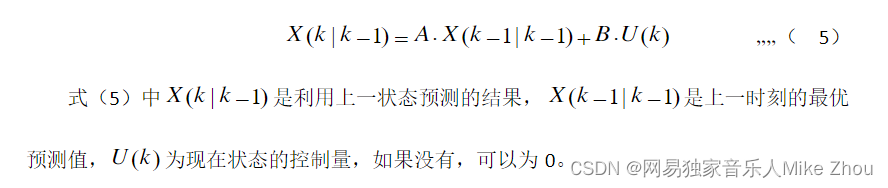
X(k|k-1) 上一次状态预测结果
X(k-1|k-1) 上一时刻的最优预测值
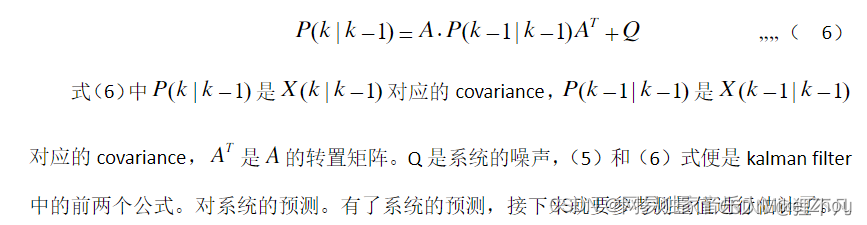
P(k|k-1) X(k|k-1)对应的convariance协方差
P(k-1|k-1) X(k-1|k-1) 对应的convariance协方差
"""x_last = 0
y_last = 0
z_last = 0
px_last = 0
py_last = 0
pz_last = 0
Q = 0.1 #系统噪声
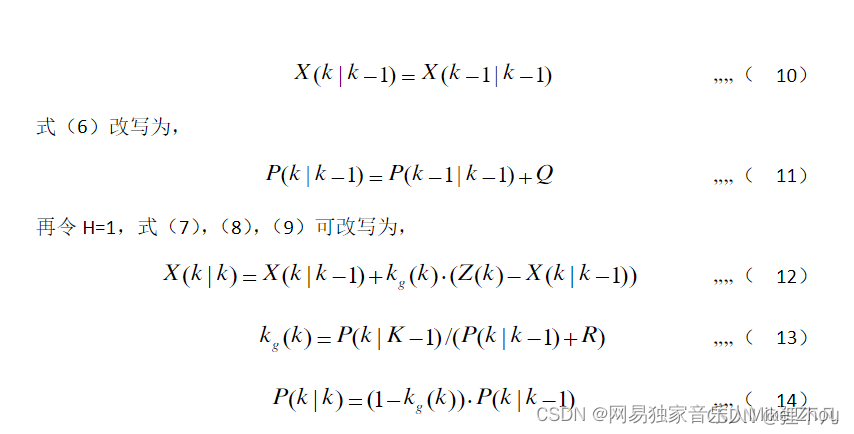
R = 0.5 #测量噪声def kalman(measure,result_last=0,prediction_last=0,Q=0.018,R=0.0542):result_mid = result_lastprediction_mid = prediction_last + Qkg = prediction_mid/(prediction_mid + R)result_now = result_mid + kg*(measure - result_mid)prediction_now = (1-kg)*prediction_midprediction_last = prediction_nowresult_last = result_nowreturn result_now,result_last,prediction_lastf=open("4.txt","r",encoding="UTF-8")
f_list=f.readlines()
f.close()x = []
y = []
z = []px=[]
py=[]
pz=[]ppx=[]
ppy=[]
ppz=[]for i in f_list:try: s=i.split("x: ")[1]s=s.split(" y: ")x.append(float(s[0]))s=s[1].split(" z: ")y.append(float(s[0]))s=s[1].split("\n")z.append(float(s[0]))except:passx_last = x[0]
px_last = x[0]y_last = y[0]
py_last = y[0]z_last = z[0]
pz_last = z[0]for i in range(len(x)):pred,x_last,px_last = kalman(x[i],x_last,px_last,Q,0.5)px.append(pred)pred,y_last,py_last = kalman(y[i],y_last,py_last,Q,0.5)py.append(pred)pred,z_last,pz_last = kalman(z[i],z_last,pz_last,Q,0.5)pz.append(pred)x_last = px[0]
px_last = px[0]y_last = py[0]
py_last = py[0]z_last = pz[0]
pz_last = pz[0]for i in range(len(px)):pred,x_last,px_last = kalman(px[i],x_last,px_last,Q,0.5)ppx.append(pred)pred,y_last,py_last = kalman(py[i],y_last,py_last,Q,0.5)ppy.append(pred)pred,z_last,pz_last = kalman(pz[i],z_last,pz_last,Q,0.5)ppz.append(pred)#plt.plot(real,color="b") #真实值
plt.figure(1)
plt.plot(x,color="g")
plt.plot(px,color="r")
plt.plot(ppx,color="b")
plt.figure(2)
plt.plot(y,color="g")
plt.plot(py,color="r")
plt.plot(ppy,color="b")
plt.figure(3)
plt.plot(z,color="g")
plt.plot(pz,color="r")
plt.plot(ppz,color="b")
plt.show()运行效果:
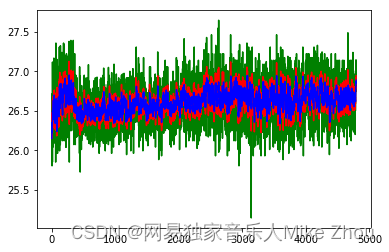
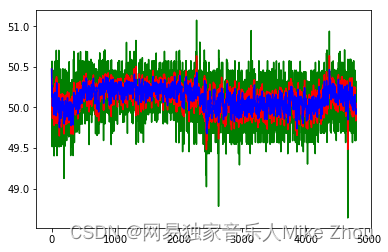
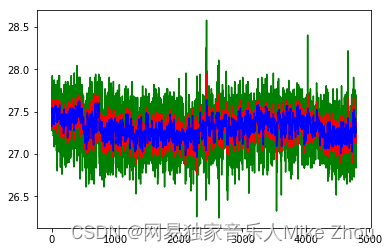
绿色的是原始数据 红色的是一次滤波 蓝色的是二次滤波(将红色的结果再次滤波)
C语言的卡尔曼滤波实现
有了Python代码 照抄就能改到C语言
Kalman_Filter_Normal_Struct Kalman_Filter_Normal(Kalman_Filter_Normal_Struct Stu)
{float result_mid = Stu.Result_Last;float prediction_mid = Stu.Prediction_Last + Stu.Q;float kg = prediction_mid/(prediction_mid + Stu.R);Stu.Result_Now = result_mid + kg*(Stu.Measure_Now - result_mid);float prediction_now = (1-kg)*prediction_mid;Stu.Prediction_Last = prediction_now;Stu.Result_Last = Stu.Result_Now;return Stu;
}
int main(void)
{float buf[10]={85.6,84.3,84.0,86.5,85.5,85.0,84.8,84.5,84.5,85.1};uint8_t i=0;Kalman_Filter_Normal_Struct Stu;Stu.Measure_Now=buf[0];Stu.Result_Now=buf[0];Stu.Result_Last=buf[0];Stu.Prediction_Last=buf[0];Stu.Q=0.1;Stu.R=0.5;for(i=0;i<10;i++){ Stu.Measure_Now=buf[i];Stu=Kalman_Filter_Normal(Stu);printf("%f\n",Stu.Result_Now);}return 0;
}最终结果:
85.599998
84.892471
84.511665
85.277679
85.359756
85.229263
85.074692
84.868370
84.736282
84.866631
附录:压缩字符串、大小端格式转换
压缩字符串
首先HART数据格式如下:
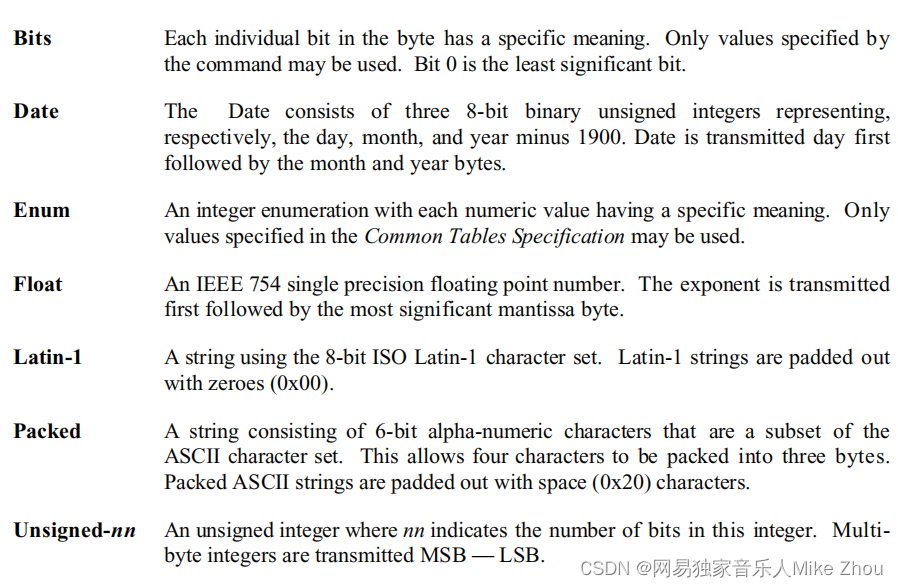
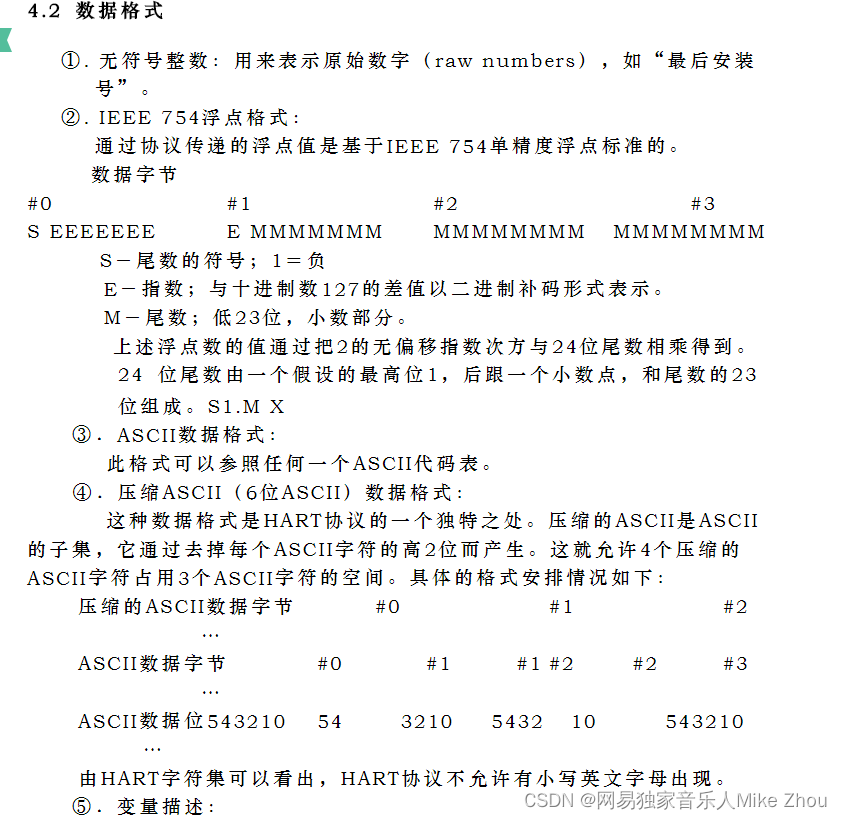
重点就是浮点数和字符串类型
Latin-1就不说了 基本用不到
浮点数
浮点数里面 如 0x40 80 00 00表示4.0f
在HART协议里面 浮点数是按大端格式发送的 就是高位先发送 低位后发送
发送出来的数组为:40,80,00,00
但在C语言对浮点数的存储中 是按小端格式来存储的 也就是40在高位 00在低位
浮点数:4.0f
地址0x1000对应00
地址0x1001对应00
地址0x1002对应80
地址0x1003对应40
若直接使用memcpy函数 则需要进行大小端转换 否则会存储为:
地址0x1000对应40
地址0x1001对应80
地址0x1002对应00
地址0x1003对应00
大小端转换:
void swap32(void * p)
{uint32_t *ptr=p;uint32_t x = *ptr;x = (x << 16) | (x >> 16);x = ((x & 0x00FF00FF) << 8) | ((x >> 8) & 0x00FF00FF);*ptr=x;
}压缩Packed-ASCII字符串
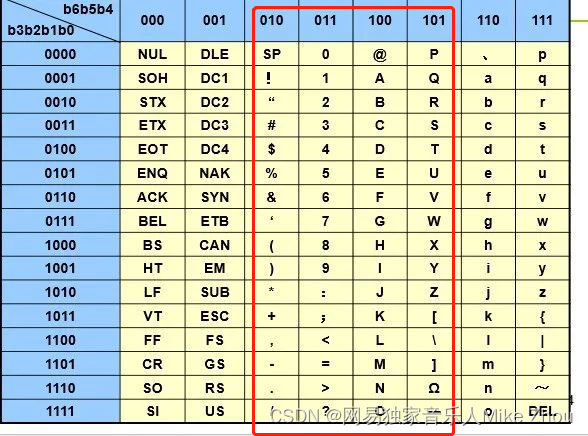
本质上是将原本的ASCII的最高2位去掉 然后拼接起来 比如空格(0x20)
四个空格拼接后就成了
1000 0010 0000 1000 0010 0000
十六进制:82 08 20
对了一下表 0x20之前的识别不了
也就是只能识别0x20-0x5F的ASCII表
压缩/解压函数后面再写:
//传入的字符串和数字必须提前声明 且字符串大小至少为str_len 数组大小至少为str_len%4*3 str_len必须为4的倍数
uint8_t Trans_ASCII_to_Pack(uint8_t * str,uint8_t * buf,const uint8_t str_len)
{if(str_len%4){return 0;}uint8_t i=0;memset(buf,0,str_len/4*3); for(i=0;i<str_len;i++){if(str[i]==0x00){str[i]=0x20;}}for(i=0;i<str_len/4;i++){buf[3*i]=(str[4*i]<<2)|((str[4*i+1]>>4)&0x03);buf[3*i+1]=(str[4*i+1]<<4)|((str[4*i+2]>>2)&0x0F);buf[3*i+2]=(str[4*i+2]<<6)|(str[4*i+3]&0x3F);}return 1;
}//传入的字符串和数字必须提前声明 且字符串大小至少为str_len 数组大小至少为str_len%4*3 str_len必须为4的倍数
uint8_t Trans_Pack_to_ASCII(uint8_t * str,uint8_t * buf,const uint8_t str_len)
{if(str_len%4){return 0;}uint8_t i=0;memset(str,0,str_len);for(i=0;i<str_len/4;i++){str[4*i]=(buf[3*i]>>2)&0x3F;str[4*i+1]=((buf[3*i]<<4)&0x30)|(buf[3*i+1]>>4);str[4*i+2]=((buf[3*i+1]<<2)&0x3C)|(buf[3*i+2]>>6);str[4*i+3]=buf[3*i+2]&0x3F;}return 1;
}