功能概述

本模块为了对电机、风机、水泵等旋转设备进行预测性运维而开发,只需一 个模块,就可以采集电机的 3 路振动信号(XYZ 轴)和一路温度信号,防护等
级 IP67 ,能够适应恶劣的工业环境。
传感器自动计算振动信号时域统计量:加速度峰值、峰峰值、有效值、峭度 指标、频率、速度有效值、以及设备的温度等,这些值写入到模组的 modbus 寄 存器,用户通过 PLC/服务器、DCS 系统读取 modbus rtu 协议寄存器的数据,从 而获取设备的运行状态参数,用户也可以让设备自动上报、获取采集的原始加速
度数据,并且采样率采样长度上报时间等可以自行配置。
参数规格
| 硬件参数 | 参数说明 |
| 电源 | +5V 和+9~+36V 可选 |
| 功耗 | 0.35W |
| 量程 | ±16g |
| 非线性度 | <2% |
| 频率响应范围 | 0.5~6kHz(+-3db) |
| 带宽内噪声 | XY≤75ug/ √Hz Z≤110ug/ √Hz |
| 采样频率 | MODBUS RTU:26667Hz 自有协议:533.34Hz、888.9Hz、1066.68Hz、1333.35Hz、 2666.7Hz 、2963Hz 、5333.4Hz 、8889Hz 、13333.5Hz、 26667Hz |
| 采样长度 | 1024 、2048 、4096 、8192 |
| 温度测量范围 | -25℃~+75℃ |
| 通信 | RS485:MODBUS RTU 协议、私有协议 |
| 工作温度 | -25℃~+75℃ |
| 防护等级 | IP67 |
| 存储温度 | -40℃~+85℃ |
| 安装方式 | 磁吸、胶装、螺丝打孔 |
| 外形尺寸 | 30*30* 19mm(加螺丝高度 21mm) |
| 软件参数 | 参数说明 |
| 485 接口 | MODBUS RTU 和自由协议 默认 9600 、N 、8 、1 本模块作为 modbus 从站,默认 ID 为 1 |
| 输出参数 | X 轴/Y 轴/Z 轴:加速度峰值、峰峰值、有效值、峭度 |
| 指标、速度有效值、频率、加速度原始数据; 温度:一路温度 |
硬件说明
2.1 接口
本设备采用四线制接法
| 名称 | 接口说明 |
| BN(棕色) | 电源+ |
| BK(黑色) | 电源- |
| GN(绿色) | RS485A |
| BU(绿色) | RS485B |
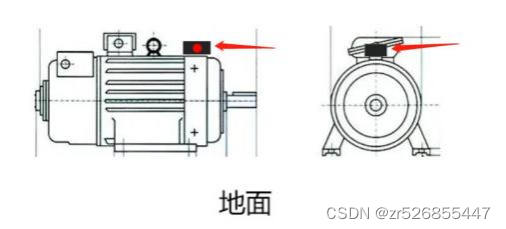
安装位置
软件说明
3.1 测试软件
上位机软件下载地址:https://www.sange-cbm.com/page11?product_id=212,
打开 MEMS 上位机软件,可以查看客观参数、波形以及对数据进行实时采集。
数据查看:如下图所示,首先打开串口,并选择三轴传感器。左边红框中, 可以看到每个轴的加速度峰值、峰峰值、有效值、峭度指标、速度有效值、频率
和一路温度,右边为动态波形显示,用户可以选择查看上述值的动态波形。

数据采集:如下图所示,点击数据采集选项,用户可以选择采集 X 轴、Y 轴、Z 轴或三个轴同步的原始数据,并且可更改采样率和采样长度。更改采样率 或者采样长度后,要点击配置参数,设备回复配置 OK ,即可点击开始采集(注 意:这里采集传输需要一定时间),数据即可显示,用户可以查看数据的加速度 时域波形、速度波形、加速度频谱、速度频谱,如需保存数据,点击保存数据按 钮,用户可在软件目录的 data 文件夹下查看保存的加速度原始数据、速度数据
和频谱数据的 txt 文档

modbus 表
备注:x100 表示该值是模块乘以 100 后上传。
| 地址 | 读写 | 类型 | 功能 | 单位 | 备注 |
| 40001 | 读 | U16 | X 轴加速度峰值 | g | x100 |
| 40002 | 读 | U16 | X 轴加速度峰峰值 | g | x100 |
| 40003 | 读 | U16 | X 轴加速度有效值 | g | x100 |
| 40004 | 读 | U16 | X 轴峭度指标 | x100 | |
| 40005 | 读 | U16 | X 轴速度有效值 | mm/s | x100 |
| 40006 | 读 | U16 | X 轴频率 | hz | 转速频率 |
| 40007 | 读 | U16 | Y 轴加速度峰值 | g | x100 |
| 40008 | 读 | U16 | Y 轴加速度峰峰值 | g | x100 |
| 40009 | 读 | U16 | Y 轴加速度有效值 | g | x100 |
| 40010 | 读 | U16 | Y 轴峭度指标 | x100 |
| 40011 | 读 | U16 | Y 轴速度有效值 | mm/s | x100 |
| 40012 | 读 | U16 | Y 轴频率 | Hz | 转速频率 |
| 40013 | 读 | U16 | Z 轴加速度峰值 | g | x100 |
| 40014 | 读 | U16 | Z 轴加速度峰峰值 | g | x100 |
| 40015 | 读 | U16 | Z 轴加速度有效值 | g | x100 |
| 40016 | 读 | U16 | Z 轴峭度指标 | x100 | |
| 40017 | 读 | U16 | Z 轴速度有效值 | mm/s | x100 |
| 40018 | 读 | U16 | Z 轴频率 | Hz | 转速频率 |
| 40019 | 读 | S16 | 温度 | ℃ | x10 |
| 自动上报 | |||||
| 40050 | 读写 | U16 | 是否开启自动上报 | 1:开启 0:关闭 | |
| 40051 | 读写 | U16 | 自动上报时间 | 默认 5s | |
| 原始数据 | |||||
| 40052 | 读写 | U16 | 采样率 | 0:533.34Hz 1:888.9Hz 2:1066.68Hz 3:1333.35Hz 4:2666.7Hz 5:2963Hz 6:5333.4Hz 7:8889Hz 8:13333.5Hz 9:26667Hz 默认 26667Hz | |
| 40053 | 读写 | U16 | 采样长度 | 0:1024 | |
| 1:2048 2:4096 3:8192 默认 4096 | ||||
| 40054 | 读 | U16 | 获取 X 轴原始数据 | |
| 40055 | 读 | U16 | 获取 Y 轴原始数据 | |
| 40056 | 读 | U16 | 获取 Z 轴原始数据 | |
| 40057 | 读 | U16 | 获取 XYZ 轴原始数据 | |
| MODBUS RTU 参数 | ||||
| 40101* | 读写 | U16 | MODBUS SLAVE ID | 默认为 1 |
| 40102* | 读写 | U16 | 串口波特率 | 0:1200 1:2400 2:4800 3:9600 4:19200 5:38400 6:115200 7:256000 默认 9600 |
| 40103* | 读写 | U16 | 串口奇偶校验 | 0:无校验 1:奇校验 2:偶校验 默认无校验 |
| 40110 | 写 | U16 | 保存修改的数据 | 1:保存并重启 |
使用方法
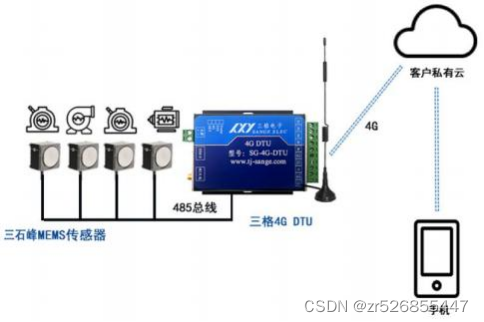
4.1 485 总线直连

4.2 无线连接


4.3 连接三石峰云平台