无人机在民用和军事领域的应用越来越广泛。然而,随着无人机数量的增加,"黑飞"现象也日益严重,对公共安全和隐私构成了威胁。因此,开发有效的无人机探测与识别技术变得尤为重要。及时发现黑飞无人机的存在进而对其型号进行识别是无人机探测技术的关键环节, 传统的无人机探测技术主要包括雷达探测和光学探测。雷达探测通过发射电磁波并接收其反射波来探测目标,能够提供目标的距离、速度和方位信息。然而,雷达系统设备成本高、体积大,且在某些复杂环境中部署困难。光学探测技术则利用摄像头或红外设备捕捉无人机的图像信息,但这种方法受天气和光照条件影响较大,夜间和能见度低的环境中效果不佳。
声学识别技术提供了一种新的解决方案。无人机在飞行中会产生独特的声学特征,这些特征可以用于无人机的检测与识别。声学探测系统由麦克风阵列、信号处理单元和识别算法组成。麦克风阵列用于收集环境中的声音信号,信号处理单元负责对收集到的声音信号进行去噪、增强等预处理,识别算法则用于分析声音特征并判断是否为无人机。
1、无人机探测技术现状
1.1 英国反无人机系统(AUDS)
AUDS是一种综合性的反无人机防御系统,它结合了雷达、热成像和射频干扰技术。
- 相控阵电子雷达可以提供高精度的目标定位和跟踪能力,而热成像仪则可以在夜间或能见度低的环境中探测到无人机。
- 当探测到无人机后,AUDS会发射大功率的射频信号来干扰无人机的GPS和通信链路,迫使无人机离开或安全降落。
1.2 Aveillant公司的三维全息雷达
- Aveillant的三维全息雷达是一种先进的雷达系统,它使用相控阵技术和脉冲多普勒处理来提供高分辨率的空中目标图像。
- 通过主动发射电磁波并接收反射回波,系统能够构建出目标的立体图像,从而实现对无人机的识别和探测。
- 这种雷达系统对于探测小型无人机特别有效,因为它们通常在雷达横截面较小,难以被传统雷达探测到。
1.3 日本Alsok公司的声学传感器阵列
- Alsok公司开发的声学探测系统利用麦克风阵列来采集无人机飞行时产生的声音。
- 通过与预先建立的无人机噪声样本库进行匹配,系统可以识别无人机的类型。
- 此外,声学阵列信号处理技术还可以用于确定无人机的位置,从而提供更全面的防御能力。
1.4中国电子科技集团第14研究所研制的“蜘蛛网反无人机系统”
中国电子科技集团第14研究所研制的“蜘蛛网反无人机系统”是一种综合性的无人机防御系统,它集成了多种技术手段,以实现对无人机的实时探测和有效反制。该系统的主要组成部分包括:
- 蜘蛛网雷达:提供全方位覆盖的雷达系统,专门设计用于探测和跟踪低空飞行的小型无人机。雷达系统具有高分辨率和高更新率,能够快速识别和跟踪目标。
- 无线电设备:用于监测和分析无人机的无线电信号,包括其通信链路和导航信号。通过对这些信号的分析,可以识别无人机的类型,并在必要时实施干扰。
- 光电红外设备:光电红外设备可以在白天或夜间捕捉无人机的热成像和视觉图像,提供另一种维度的探测能力。这种设备对于在视觉隐蔽环境下探测无人机尤为重要。
- 干扰反制设备:当探测到无人机后,干扰反制设备可以发射干扰信号,阻断无人机的通信链路和导航系统,迫使无人机离开或降落。
1.5 中国科学院声学研究所的吴国清团队在声学目标识别领域的研究成果
中国科学院声学研究所的吴国清团队在声学目标识别领域的研究成果体现了声学技术在无人机探测中的应用潜力。通过提取声信号的功率谱与双重谱特征,他们利用模糊神经网络对声目标进行了分类识别研究,并取得了92%的识别准确率。这一研究成果证明了声学特征在无人机识别中的有效性,以及模糊神经网络在声学目标识别任务中的强大能力。
2、声纹识别的技术原理
2.1 无人机声音的产生机理
无人机声音的产生机理与任何飞行器类似,主要是由于推进系统、气流扰动、机械振动和其他运动部件的相互作用造成的。
- 推进系统:无人机的主要噪声源是其推进系统,这可能是电动机、内燃机或其他类型的发动机。对于电动无人机,电动机旋转时会发出声音,尤其是在加速或高速运转时。对于内燃机无人机,内燃机的爆炸过程、排气以及活塞和连杆的运动都会产生噪声。
- 气流扰动:无人机飞行时,其旋翼(对于多旋翼无人机)或固定翼(对于固定翼无人机)与空气的相互作用会产生气流扰动,从而产生噪声。旋翼在切割空气时会产生挥舞噪声和宽带噪声,而固定翼无人机的机翼和尾翼在气流中也可能产生噪声。
- 机械振动:无人机的机械部件,如发动机、旋翼叶片、齿轮和轴承,在运行时都会产生振动。这些振动通过无人机的结构传播,最终以声波的形式辐射出去,成为可听到的噪声。
2.2 无人机声音样本库
无人机声音样本库是一个收集无人机在各种操作状态下产生的声音的数据库。这个数据库包含了不同类型、不同型号的无人机在起飞、飞行、悬停、降落等状态下的声音样本。
对样本库中的声音信号的声强幅值进行归一化处理,可以防止由于采集到的声音信号强弱不同而造成的识别错误,防止同一种无人机由于其飞行过程中与音频采集装置距离的不同而造成声强的不同,使识别系统误认为是两种不同的无人机。
可用数据集:MMAUD(Multi-Modal Anti-UAV Dataset)数据集(现代小型无人机威胁的多模态反无人机数据集,包括DJI Mavic2、DJI Mavic3、DJI Phantom4、DJI Avata等):MMAUD · A Comprehensive Multi-Modal Anti-UAV Dataset for Detection, Classification, Tracking and Trajectory...
2.3 无人机声音时频特性
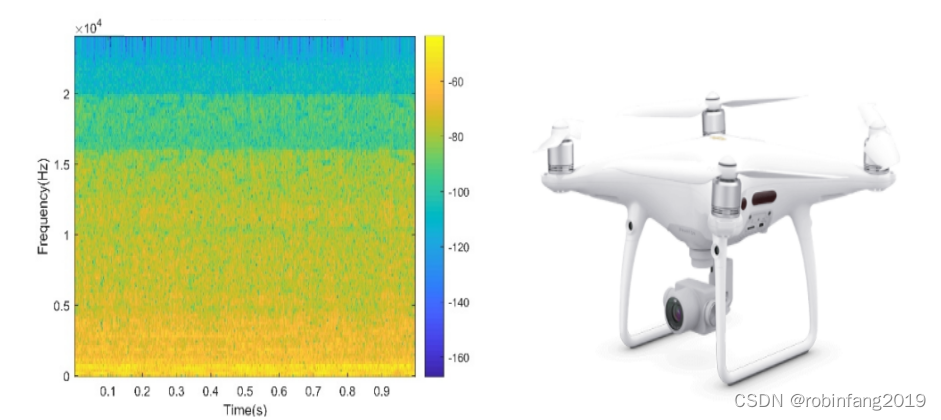
DJI Phantom4时频谱图
3、无人机有无判断
无人机的有无判别是指当外界传入声信号为无人机声音时,判别器进行预警, 而当外界传入的声信号为非无人机飞行声音时,判别系统不进行预警。无人机的有 无判别采用自动编码器与门限检测相结合来实现,通过提取无人机声信号的梅尔倒谱系数作为所搭建的自动编码器的训练集样本数据,经过自动编码器对无人机声信号梅尔特征的学习,使经过自动编码器重构后的数据可以实现对无人机声信号梅尔特征的拟合,并根据重构后的数据与输入数据的均方误差损失来划定检测门限,并对不同信噪比下的检测概率与虚警概率进行测试以评价此判别器的识别效果。
4、无人机类型识别
4.1 基于卷积神经网络的无人机类型识别技术
卷积神经网络(CNN)因其在图像处理中的成功应用而被广泛研究和使用。在声音识别领域,CNN能够有效地从声音数据中提取特征,并通过深层网络结构来提高识别的准确率。。
应用卷积神经网络对无人机进行类型识别的研究中,将一维的无人机声音信号通过时频分析方法(包括短时傅里叶变换与小波变换)得到无人机声信号的时频特征矩阵,时频特征矩阵是一个二维张量,可以作为二维卷积神经网络的输入层,通过对卷积神经网络的训练使其学习到每种无人机声信号的深层特征,并对训练好的卷积神经网络进行识别准确率测试。采用深度卷积生成式对抗网络(DCGAN)对无人机声信号进行数据增强,并对比未经数据增强的无人机类型识别准确率与经过数据增强的识别准确率。实验结果显示,CNN在识别无人机声音方面的准确率达到了96.5%,识别准确度会随着信噪比的降低而逐渐下降。
4.2 基于循环神经网络的无人机类型识别技术
循环神经网络(RNN)由于其在处理序列数据方面的优势,也被应用于无人机声音识别中。RNN特别适合处理时间序列数据,如声音信号,因此在动态环境下的声音识别任务中表现出色。将无人机声信号的梅尔倒谱系数特征作为循环神经网络的输入,采用 RNN 循环神经网络、LSTM 长短时记忆网络以及 Bi-LSTM 双向长短时记忆网络三种循环神经网络根据无人机的辐射噪声对其进行类型识别。
通过提取无人声信号的梅尔倒谱特征,并作为 RNN、LSTM 以及 Bi-LSTM 三种循环神经网络的输入。其中,RNN 网络获得了 92.50%的识别准确率,LSTM 网络获得了 95.83%的识别准确率,Bi-LSTM 网络获得了 97.33%的识别准确率。识别准确度会随着信噪比的降低而下降明显。
5、无人机空间定位
- 声波信号的捕捉:无人机在飞行过程中会发出特定的声波信号,这些信号可以被地面上的麦克风阵列捕捉到。这一过程类似于人类耳朵如何接收声音。
- 信号处理与定位:接收到的声波信号会被传输到中央处理系统。在这里,利用算法对这些信号进行处理,以确定声源(即无人机)的精确位置。这通常涉及到计算不同麦克风之间接收到的信号的时间差或相位差。
- 定位精度与误差:根据研究,这种基于地面麦克风阵列的声波定位技术能够实现对无人机的高精度定位,其定位相对误差可达0.5%,并且可以定位到120米的高度。


![[初学者来练]用html+css+javascript个人博客作业需求](https://img-blog.csdnimg.cn/b161eb27bad34615904c5600b4108e58.gif#pic_center)
