1.红黑树源码
我们使用上节课的红黑树源码来封装map和set.
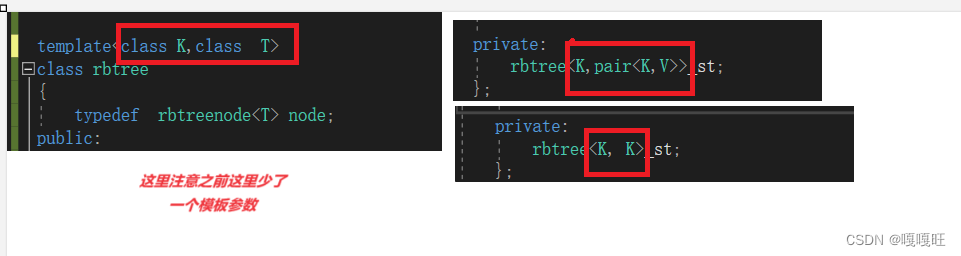
因为map存的是(key,value),set存的是(key),为了我们set和map使用同一个类模板(红黑树),所以我们先要修改红黑树结点中存的数据类型,我们使用模板来初始化,根据实列化来决定结点中存的是pair,还是只有一个数据
做出修改:代码中所有key的地方用data代替,而data的数据类型是T,当是set实列化的时候T就是int(一种),当是map的时候T就是pair,比方说pair<string,int>
#include<iostream>
#include<string>
using namespace std;
enum Colour
{RED,BLACK};
template<class T>
struct rbtreenode
{rbtreenode<T>* _left;rbtreenode<T>* _right;rbtreenode<T>* _parent;T _data;Colour _col;rbtreenode(const T& data):_left(nullptr), _right(nullptr), _parent(nullptr), _data(data), _col(RED){}};template<class T>
class rbtree
{typedef rbtreenode<T> node;
public:void spinleft(node* parent){node* subr = parent->_right;node* subrl = subr->_left;parent->_right = subrl;if (subrl)subrl->_parent = parent;subr->_left = parent;node* ppnode = parent->_parent;parent->_parent = subr;if (ppnode == nullptr){_root = subr;subr->_parent = nullptr;}else{if (ppnode->_left == parent){ppnode->_left = subr;subr->_parent = ppnode;}else{ppnode->_right = subr;subr->_parent = ppnode;}}}void spinright(node* parent){node* subl = parent->_left;node* sublr = subl->_right;parent->_left = sublr;if (sublr)sublr->_parent = parent;subl->_right = parent;node* ppnode = parent->_parent;parent->_parent = subl;if (ppnode == nullptr){_root = subl;subl->_parent = nullptr;}else{if (ppnode->_left == parent){ppnode->_left = subl;subl->_parent = ppnode;}else{ppnode->_right = subl;subl->_parent = ppnode;}}}void spinlr(node* parent){node* subl = parent->_left;node* sublr = subl->_right;//int bf = sublr->_bf;spinleft(parent->_left);spinright(parent);/* if (bf == 1){subl->_bf = -1;sublr->_bf = 0;parent->_bf = 0;}else if (bf == -1){subl->_bf = 0;sublr->_bf = 0;parent->_bf = 1;}else{subl->_bf = 0;sublr->_bf = 0;parent->_bf = 0;}*/}void spinrl(node* parent){node* subr = parent->_right;node* subrl = subr->_left;//int bf = subrl->_bf;spinright(subr);spinleft(parent);/* if (bf == 1){parent->_bf = -1;subr->_bf = 0;subrl->_bf = 0;}else if (bf == -1){parent->_bf = 0;subr->_bf = 1;subrl->_bf = 0;}else{subr->_bf = 0;subrl->_bf = 0;parent->_bf = 0;}*/}bool insert(const T& data){if (_root == nullptr){_root = new node(data);_root->_col = BLACK;return true;}node* cur = _root;node* parent = nullptr;while (cur){if (cur->_data > data){parent = cur;cur = cur->_left;}else if (cur->_data < data){parent = cur;cur = cur->_right;}else{return false;}}cur = new node(data);if (parent->_data > data){parent->_left = cur;}else{parent->_right = cur;}cur->_parent = parent;while (parent && parent->_col == RED){node* grandfather = parent->_parent;if (parent == grandfather->_left){node* uncle = grandfather->_right;if (uncle && uncle->_col == RED){parent->_col = BLACK;uncle->_col = BLACK;grandfather->_col = RED;cur = grandfather;parent = cur->_parent;}else{if (cur == parent->_right){spinright(grandfather);parent->_col = BLACK;grandfather->_col = RED;}else{spinleft(parent);spinright(grandfather);cur->_col = BLACK;grandfather->_col = RED;}break;}}else{node* uncle = grandfather->_left;if (uncle && uncle->_col == RED){parent->_col = BLACK;uncle->_col = BLACK;grandfather->_col = RED;cur = grandfather;parent = cur->_parent;}else{if (cur == parent->_left){spinleft(grandfather);parent->_col = BLACK;grandfather->_col = RED;}else{spinright(parent);spinleft(grandfather);cur->_col = BLACK;grandfather->_col = RED;}break;}}}_root->_col = BLACK;return true;}bool Check(node* cur){if (cur == nullptr)return true;if (cur->_col == RED && cur->_parent->_col == RED){cout << cur->_key<< "存在连续的红色节点" << endl;return false;}return Check(cur->_left)&& Check(cur->_right);}bool IsBalance(){if (_root && _root->_col == RED)return false;return Check(_root);}void inorder(){_inorder(_root);}void _inorder(node* root){if (root == nullptr)return;_inorder(root->_left);cout << root->_data << endl;_inorder(root->_right);}node* Find(const T& data){node* cur = _root;node* parent = nullptr;while (cur){if (cur->_data > data){parent = cur;cur = cur->_left;}else if (cur->_data < _data){parent = cur;cur = cur->_right;}else{return cur;}}return nullptr;}private:int treeheight(node* root){if (root == nullptr)return 0;int leftheight = treeheight(root->_left);int rightheight = treeheight(root->_right);return leftheight > rightheight ? leftheight + 1 : rightheight + 1;}node* _root = nullptr;};
int main()
{rbtree<int>st;int a[] = //{ 16,3,1 };//测试右旋//{ 16,32,58 };//测试左旋//{ 8,3,1,10,6,4};//测试右左旋{ 4, 2, 6, 1, 3, 5, 15, 7, 16,14 };for (auto e : a){st.insert(e);}st.inorder();int ret = st.IsBalance();cout << endl;cout << ret;}
2.set和map类的简单封装

#pragma once
#include"rbtree.h"
namespace zjw
{template<class K,class V>class map {public:private:rbtree<K,pair<K,V>>_st;};
}#pragma once
#include"rbtree.h"
namespace zjw
{template<class K>class set {public:private:rbtree<K, K>_st;};
}
3.map和set调用底层rbtree的insert函数
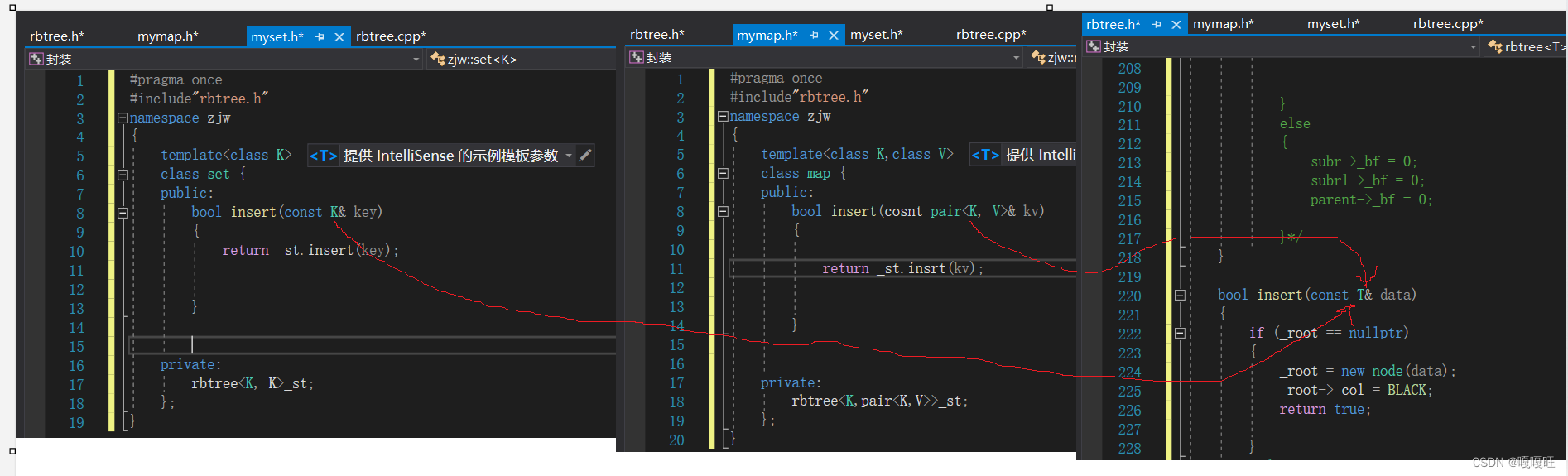
#pragma once
#include"rbtree.h"
namespace zjw
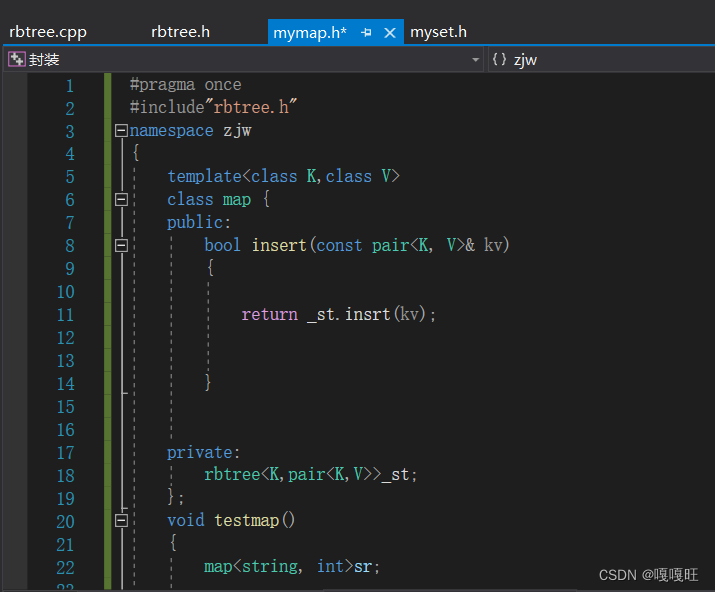
{template<class K,class V>class map {public:bool insert(cosnt pair<K, V>& kv){return _st.insrt(kv);}private:rbtree<K,pair<K,V>>_st;};
}#pragma once
#include"rbtree.h"
namespace zjw
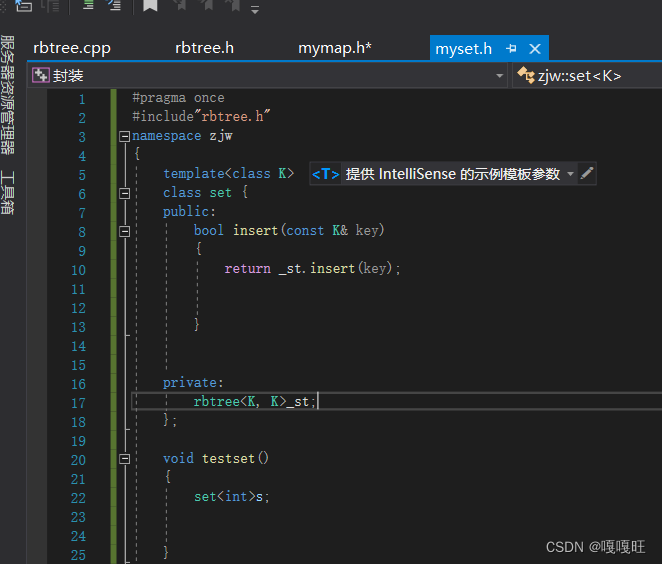
{template<class K>class set {public:bool insert(const K& key){return _st.insert(key);}private:rbtree<K, K>_st;};
}
4.阶段测试
5._data的元素提取
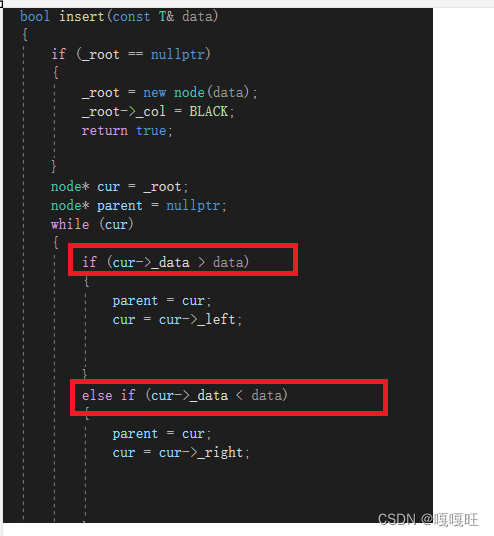
因为我们不管是map还是set,他们插入都是根据第一个模板参数比较大小,来确定插入当前结点的左还是右,但是为什么之前的代码没有报错??
因为如果是map的话,pair也是可以比较大小的,规则是第一个大的大。第一个一样大,就比较第二个,第二个谁大就大
但是我们回顾之前的map和set都是按照第一个比较,所以我们可以这样做。在map和set类中定义内部类,如果rbtree中有需要比较data大小时,初始化一个内部类取data第一个内容来比较,我们只需要在map和set中初始化一个内部类对象即可返回data的第一个内容。
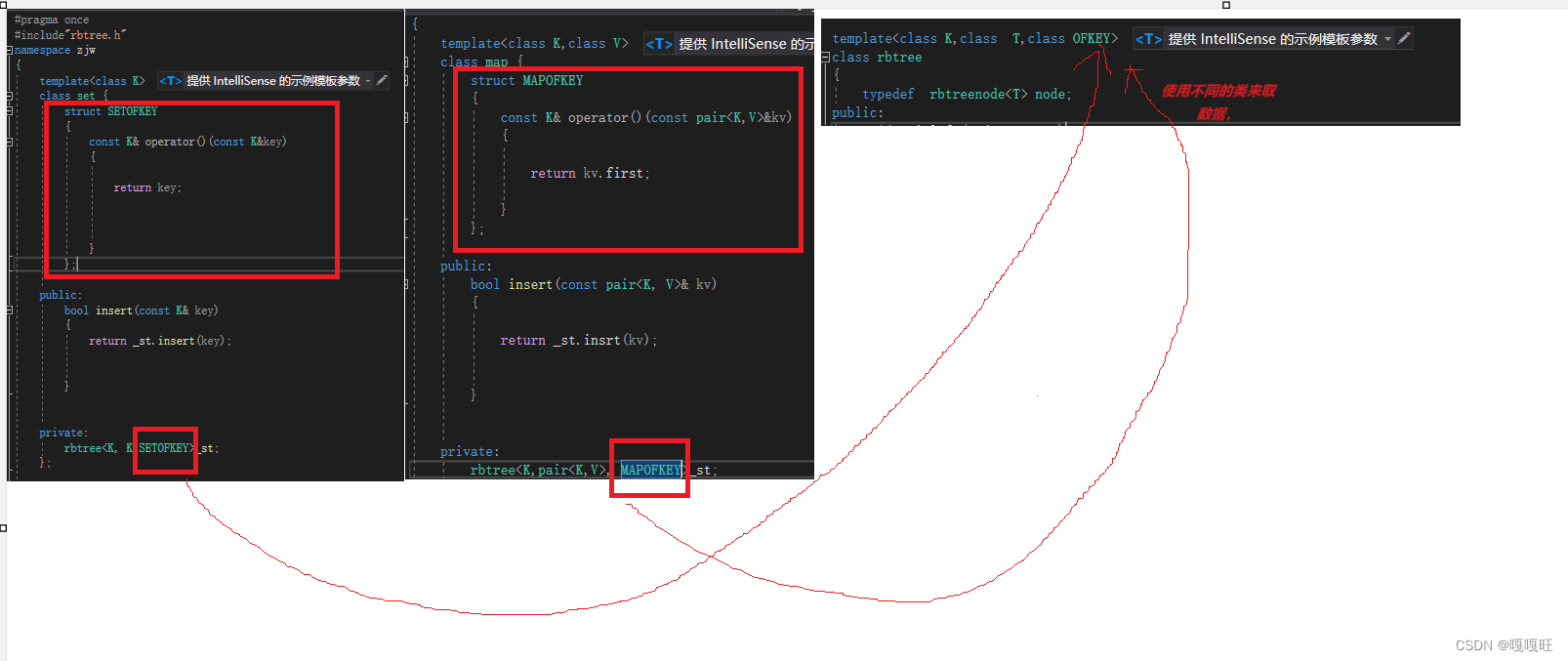
在rbtree中需要比较_data的地方都需要使用类对象来返回data的第一个内容
#pragma once
#include<iostream>
#include<string>
using namespace std;
enum Colour
{RED,BLACK};
template<class T>
struct rbtreenode
{rbtreenode<T>* _left;rbtreenode<T>* _right;rbtreenode<T>* _parent;T _data;Colour _col;rbtreenode(const T& data):_left(nullptr), _right(nullptr), _parent(nullptr), _data(data), _col(RED){}};template<class K,class T,class OFKEY>
class rbtree
{typedef rbtreenode<T> node;
public:void spinleft(node* parent){node* subr = parent->_right;node* subrl = subr->_left;parent->_right = subrl;if (subrl)subrl->_parent = parent;subr->_left = parent;node* ppnode = parent->_parent;parent->_parent = subr;if (ppnode == nullptr){_root = subr;subr->_parent = nullptr;}else{if (ppnode->_left == parent){ppnode->_left = subr;subr->_parent = ppnode;}else{ppnode->_right = subr;subr->_parent = ppnode;}}}void spinright(node* parent){node* subl = parent->_left;node* sublr = subl->_right;parent->_left = sublr;if (sublr)sublr->_parent = parent;subl->_right = parent;node* ppnode = parent->_parent;parent->_parent = subl;if (ppnode == nullptr){_root = subl;subl->_parent = nullptr;}else{if (ppnode->_left == parent){ppnode->_left = subl;subl->_parent = ppnode;}else{ppnode->_right = subl;subl->_parent = ppnode;}}}void spinlr(node* parent){node* subl = parent->_left;node* sublr = subl->_right;//int bf = sublr->_bf;spinleft(parent->_left);spinright(parent);/* if (bf == 1){subl->_bf = -1;sublr->_bf = 0;parent->_bf = 0;}else if (bf == -1){subl->_bf = 0;sublr->_bf = 0;parent->_bf = 1;}else{subl->_bf = 0;sublr->_bf = 0;parent->_bf = 0;}*/}void spinrl(node* parent){node* subr = parent->_right;node* subrl = subr->_left;//int bf = subrl->_bf;spinright(subr);spinleft(parent);/* if (bf == 1){parent->_bf = -1;subr->_bf = 0;subrl->_bf = 0;}else if (bf == -1){parent->_bf = 0;subr->_bf = 1;subrl->_bf = 0;}else{subr->_bf = 0;subrl->_bf = 0;parent->_bf = 0;}*/}bool insert(const T& data){OFKEY sk;if (_root == nullptr){_root = new node(data);_root->_col = BLACK;return true;}node* cur = _root;node* parent = nullptr;while (cur){if (sk(cur->_data) > sk(data)){parent = cur;cur = cur->_left;}else if (sk(cur->_data) < sk(data)){parent = cur;cur = cur->_right;}else{return false;}}cur = new node(data);if (sk(parent->_data) > sk(data)){parent->_left = cur;}else{parent->_right = cur;}cur->_parent = parent;while (parent && parent->_col == RED){node* grandfather = parent->_parent;if (parent == grandfather->_left){node* uncle = grandfather->_right;if (uncle && uncle->_col == RED){parent->_col = BLACK;uncle->_col = BLACK;grandfather->_col = RED;cur = grandfather;parent = cur->_parent;}else{if (cur == parent->_right){spinright(grandfather);parent->_col = BLACK;grandfather->_col = RED;}else{spinleft(parent);spinright(grandfather);cur->_col = BLACK;grandfather->_col = RED;}break;}}else{node* uncle = grandfather->_left;if (uncle && uncle->_col == RED){parent->_col = BLACK;uncle->_col = BLACK;grandfather->_col = RED;cur = grandfather;parent = cur->_parent;}else{if (cur == parent->_left){spinleft(grandfather);parent->_col = BLACK;grandfather->_col = RED;}else{spinright(parent);spinleft(grandfather);cur->_col = BLACK;grandfather->_col = RED;}break;}}}_root->_col = BLACK;return true;}bool Check(node* cur){if (cur == nullptr)return true;if (cur->_col == RED && cur->_parent->_col == RED){cout << cur->_data << "存在连续的红色节点" << endl;return false;}return Check(cur->_left)&& Check(cur->_right);}bool IsBalance(){if (_root && _root->_col == RED)return false;return Check(_root);}void inorder(){_inorder(_root);}void _inorder(node* root){if (root == nullptr)return;_inorder(root->_left);cout << root->_data << endl;_inorder(root->_right);}node* Find(const T& data){OFKEY sk;node* cur = _root;node* parent = nullptr;while (cur){if (sk(cur->_data) > sk(data)){parent = cur;cur = cur->_left;}else if (sk(cur->_data) < sk(data)){parent = cur;cur = cur->_right;}else{return cur;}}return nullptr;}private:int treeheight(node* root){if (root == nullptr)return 0;int leftheight = treeheight(root->_left);int rightheight = treeheight(root->_right);return leftheight > rightheight ? leftheight + 1 : rightheight + 1;}node* _root = nullptr;};
6.迭代器
template<class T,class Pef,class Ptr>
struct _rbtreeIterator
{typedef rbtreenode<T> node;typedef _rbtreeIterator<T, Pef, Ptr> Self;Node* _node;
public:_rbtreeIterator(Node* node):_node(node){//默认构造}Self& operator++(){//迭代器++}Self& operator--(){//迭代器--}bool operator!=(Self& s){//两个结点是否是同一结点}Pef operator*(){//重载*}Ptr operator->(){//重载->}};
上面迭代器封装在list里面有说过
template<class T,class Pef,class Ptr>
struct _rbtreeIterator
{typedef rbtreenode<T> node;typedef _rbtreeIterator<T, Pef, Ptr> Self;Node* _node;
public:_rbtreeIterator(Node* node):_node(node){//默认构造}Self& operator++(){//迭代器++}Self& operator--(){//迭代器--}bool operator!=(Self& s){//两个结点是否是同一结点return _node != s._node;}Pef operator*(){//重载*return _node->_data;}Ptr operator->(){//重载->return &_node->_data}};
重点说一下迭代器++和–,
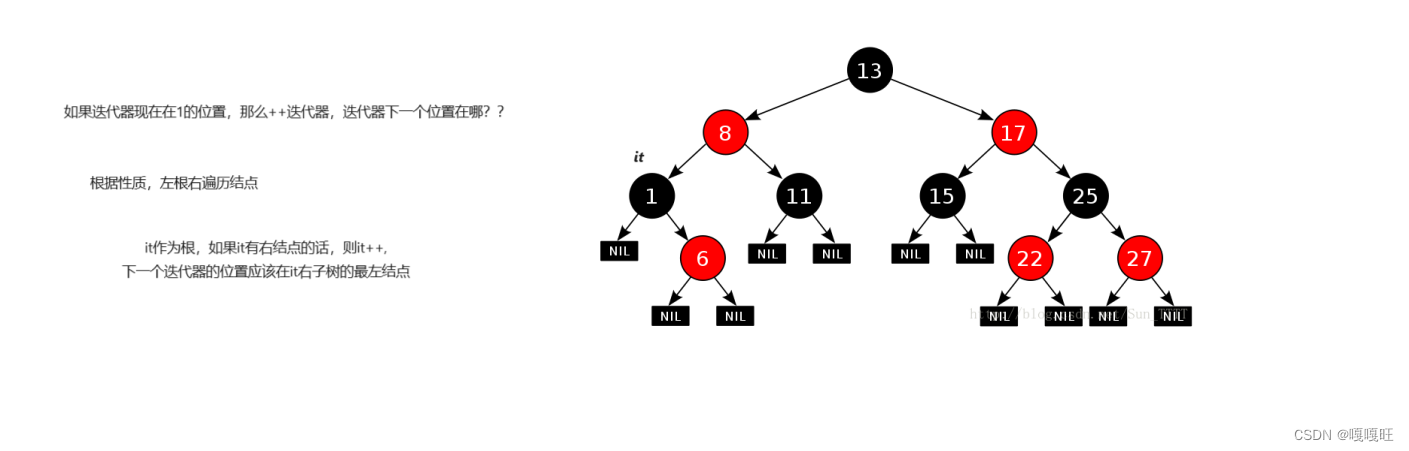
Self& operator++(){//迭代器++if (_node->_right){Node* next = _node->_right;while (next->_left){next = next->_left;}_node = next;}}
如果_node没有右结点的话,迭代器++下一个位置应该是哪里呢?
比方说_node在6的位置
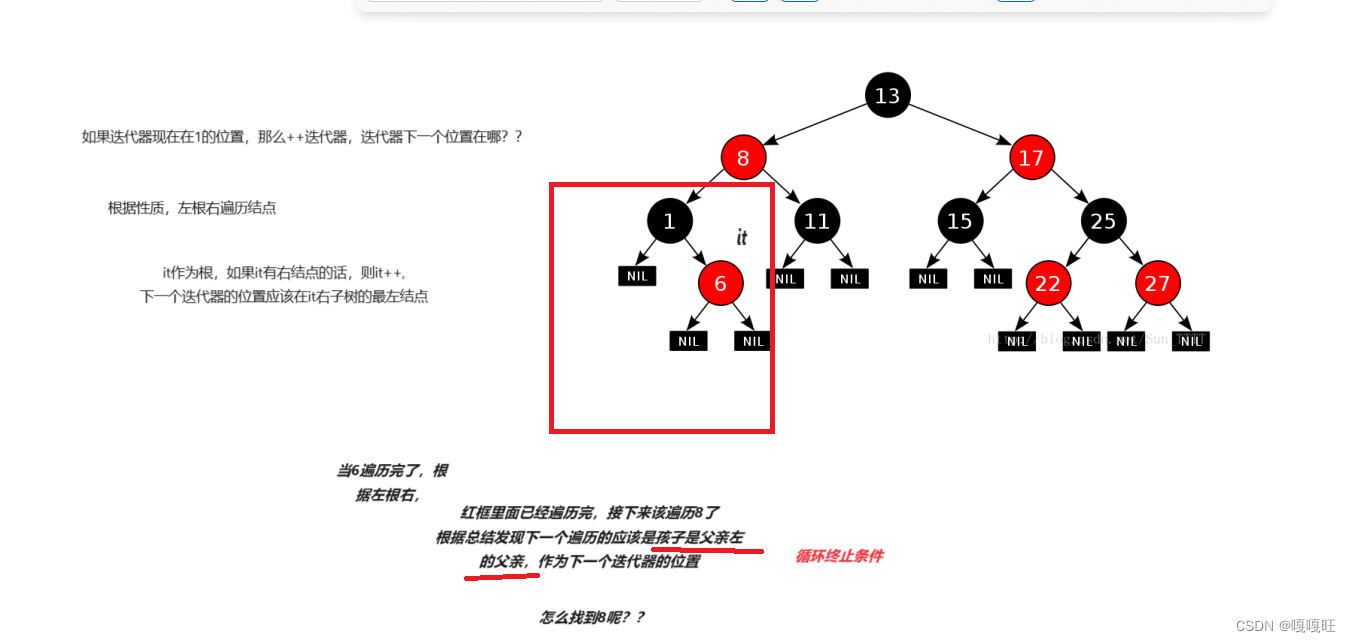
Self& operator++(){//迭代器++if (_node->_right){Node* next = _node->_right;while (next->_left){next = next->_left;}_node = next;}else{Node* cur = _node;Node* parent = cur->_parent;while (parent && cur == parent->_right)//循环找孩子是父亲左的父亲,该父亲是下一个迭代器的结点{cur = parent;parent = parent->_parent;}_node = parent;}return *this;}
同理–
Self& operator--(){//迭代器--if (_node->_left){Node* next = _node->_left;while (next->_right){next = next->_right;}_node = next;}else{Node* cur = _node;Node* parent = cur->_parent;while (parent && cur == parent->_left){cur = parent;parent = parent->_parent;}_node = parent;}return *this;}
红黑树调用迭代器
template<class K,class T,class OFKEY>
class rbtree
{typedef rbtreenode<T> node;typedef _rbtreeIterator<T, T&, T*> iterator;
public:iterator begin(){//红黑树根结点的最左结点为最小node* cur = _root->_left;while (cur){cur = cur->_left;}return iterator(cur);}iterator end(){//空return iterator(nullptr);}
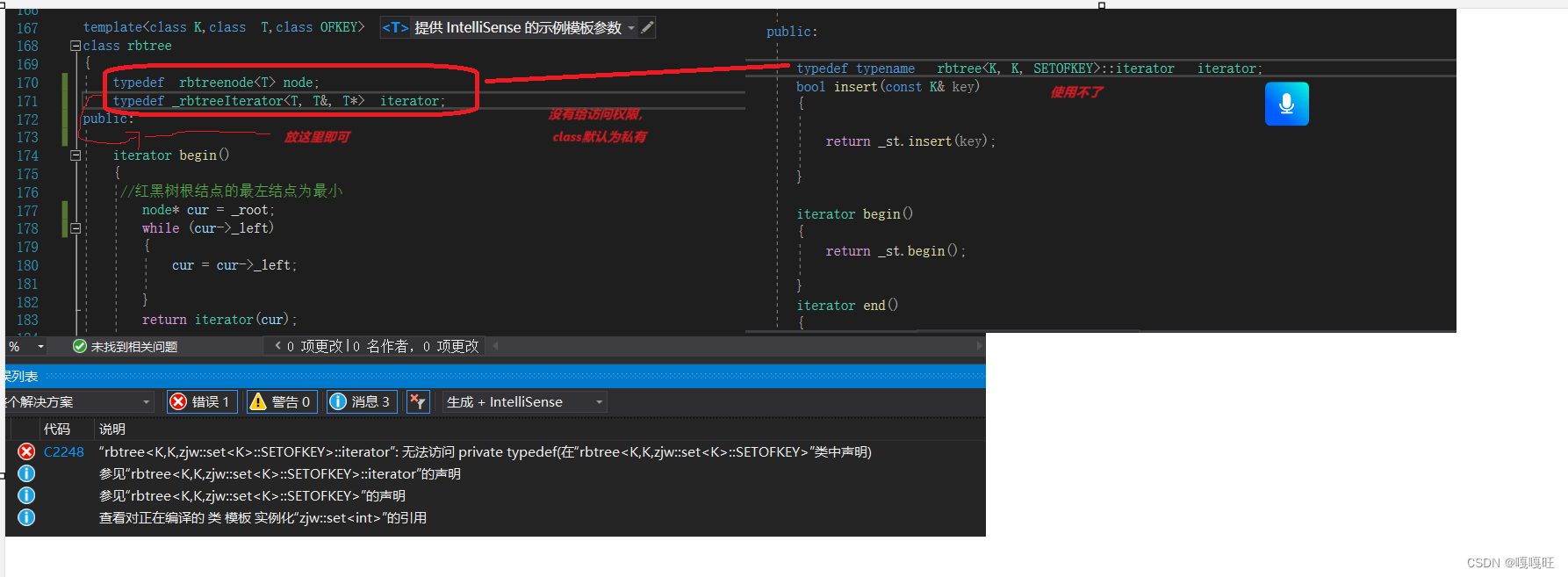
7.set迭代器测试
#pragma once
#include"rbtree.h"
namespace zjw
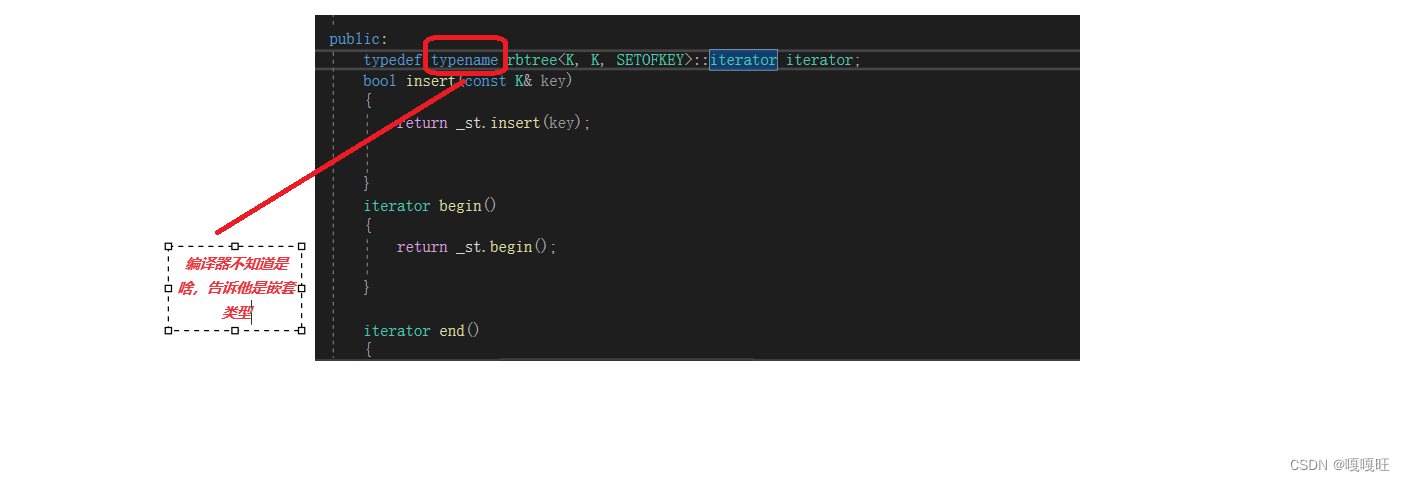
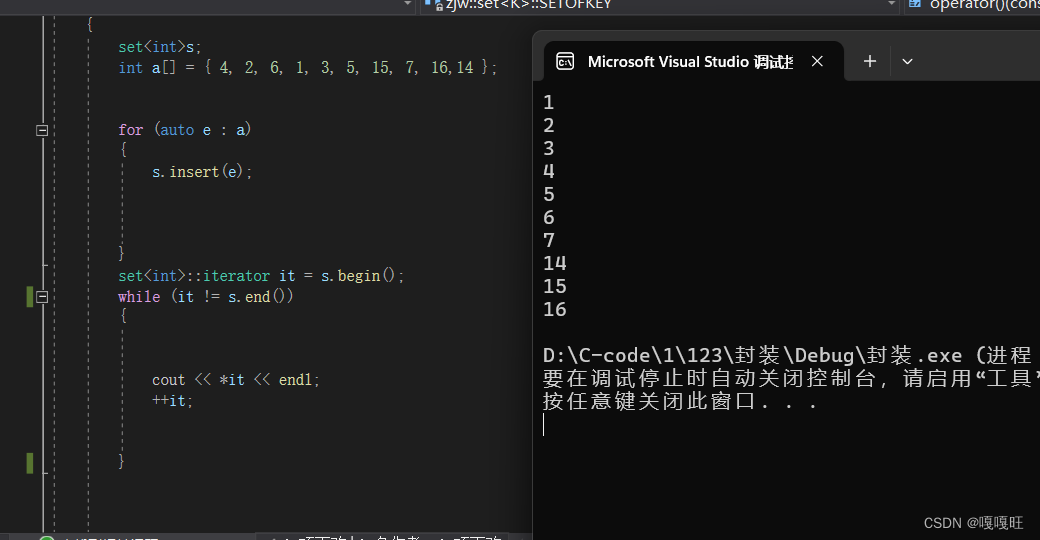
{template<class K>class set {struct SETOFKEY{const K& operator()(const K&key){return key;}};public:typedef typename rbtree<K, K, SETOFKEY>::iterator iterator;bool insert(const K& key){return _st.insert(key);}iterator begin(){return _st.begin();}iterator end(){return _st.end();}private:rbtree<K, K,SETOFKEY>_st;};void testset(){set<int>s;int a[] = { 4, 2, 6, 1, 3, 5, 15, 7, 16,14 };for (auto e : a){s.insert(e);}set<int>::iterator it = s.begin();while (it != s.end()){cout << *it << endl;++it;}}}
#include<iostream>
#include<string>
#include"mymap.h"
#include"myset.h"
using namespace std;
int main()
{//zjw::testmap();zjw::testset();}
8.map迭代器测试
#pragma once
#include"rbtree.h"
namespace zjw
{template<class K,class V>class map {struct MAPOFKEY{const K& operator()(const pair<K,V>&kv){ return kv.first;}};public:typedef typename rbtree<K, pair<K,V>, MAPOFKEY>::iterator iterator;bool insert(const pair<K, V>& kv){return _st.insert(kv);}iterator begin(){return _st.begin();}iterator end(){return _st.end();}private:rbtree<K,pair<K,V>, MAPOFKEY>_st;};void testmap(){map<string, int>sr;sr.insert(make_pair("b", 1));sr.insert(make_pair("think", 1));sr.insert(make_pair("cool", 1));map<string, int>::iterator it = sr.begin();// //auto it = dic.begin();while (it != sr.end()){cout << it->first << ":" << it->second << endl;++it;}cout << endl;}}
#include<iostream>
#include<string>
#include"mymap.h"
#include"myset.h"
using namespace std;
int main()
{zjw::testmap();//zjw::testset();}