经过前面三节的铺垫,我们只需要再编写一个launch文件启动nav2就可以让fishbot自己动起来了。
1.编写launch文件
我们将地图、配置文件传递给nav2为我们提供好的launch文件中即可。
再一个launch文件中包裹另一个功能包中的luanch文件采用的是IncludeLaunchDescription和PythonLaunchDescriptionSource
import os from ament_index_python.packages import get_package_share_directory from launch import LaunchDescription from launch.actions import IncludeLaunchDescription from launch.launch_description_sources import PythonLaunchDescriptionSource from launch.substitutions import LaunchConfiguration from launch_ros.actions import Nodedef generate_launch_description():#=============================1.定位到包的地址=============================================================fishbot_navigation2_dir = get_package_share_directory('fishbot_navigation2')nav2_bringup_dir = get_package_share_directory('nav2_bringup')#=============================2.声明参数,获取配置文件路径===================================================# use_sim_time 这里要设置成true,因为gazebo是仿真环境,其时间是通过/clock话题获取,而不是系统时间use_sim_time = LaunchConfiguration('use_sim_time', default='true') map_yaml_path = LaunchConfiguration('map',default=os.path.join(fishbot_navigation2_dir,'maps','fishbot_map.yaml'))nav2_param_path = LaunchConfiguration('params_file',default=os.path.join(fishbot_navigation2_dir,'param','fishbot_nav2.yaml'))rviz_config_dir = os.path.join(nav2_bringup_dir,'rviz','nav2_default_view.rviz')#=============================3.声明启动launch文件,传入:地图路径、是否使用仿真时间以及nav2参数文件==============nav2_bringup_launch = IncludeLaunchDescription(PythonLaunchDescriptionSource([nav2_bringup_dir,'/launch','/bringup_launch.py']),launch_arguments={'map': map_yaml_path,'use_sim_time': use_sim_time,'params_file': nav2_param_path}.items(),)rviz_node = Node(package='rviz2',executable='rviz2',name='rviz2',arguments=['-d', rviz_config_dir],parameters=[{'use_sim_time': use_sim_time}],output='screen')return LaunchDescription([nav2_bringup_launch,rviz_node])
2.安装并添加依赖
2.1 修改CMakeLists.txt
添加install指令,将文件拷贝到install目录
cmake_minimum_required(VERSION 3.5) project(fishbot_navigation2)# find dependencies find_package(ament_cmake REQUIRED) install(DIRECTORY launch param mapsDESTINATION share/${PROJECT_NAME} )ament_package()
2.2 添加依赖
主要是添加这行 <exec_depend>nav2_bringup</exec_depend>
<?xml version="1.0"?> <?xml-model href="http://download.ros.org/schema/package_format3.xsd" schematypens="http://www.w3.org/2001/XMLSchema"?> <package format="3"><name>fishbot_navigation2</name><version>0.0.0</version><description>TODO: Package description</description><maintainer email="sangxin2014@sina.com">root</maintainer><license>TODO: License declaration</license><buildtool_depend>ament_cmake</buildtool_depend><test_depend>ament_lint_auto</test_depend><test_depend>ament_lint_common</test_depend><exec_depend>nav2_bringup</exec_depend><export><build_type>ament_cmake</build_type></export> </package>
3.构建运行
3.1 构建
colcon build --packages-up-to fishbot_navigation2
3.2 运行
3.2.1 运行仿真
source install/setup.bash
ros2 launch fishbot_description gazebo.launch.py
4.初始化位置
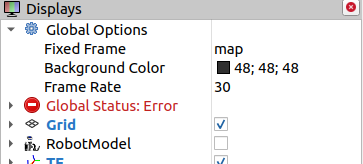
启动后正常你应该在RVIZ2和终端看到一个错误,这是因为没有给定初始化位置(告诉机器人它在地图的大概位置)导致的。
[planner_server-5] [INFO] [1652973621.731976741] [global_costmap.global_costmap]: Timed out waiting for transform from base_link to map to become available, tf error: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist [rviz2-10] [INFO] [1652973621.760971376] [rviz2]: Message Filter dropping message: frame 'odom' at time 0.000 for reason 'Unknown' [rviz2-10] [INFO] [1652973621.856298950] [rviz2]: Message Filter dropping message: frame 'laser_link' at time 4392.881 for reason 'Unknown' [rviz2-10] [INFO] [1652973621.951345246] [rviz2]: Message Filter dropping message: frame 'laser_link' at time 4392.981 for reason 'Unknown' [rviz2-10] [INFO] [1652973621.951468235] [rviz2]: Message Filter dropping message: frame 'odom' at time 0.000 for reason 'Unknown' [rviz2-10] [INFO] [1652973622.047860791] [rviz2]: Message Filter dropping message: frame 'laser_link' at time 4393.081 for reason 'Unknown'
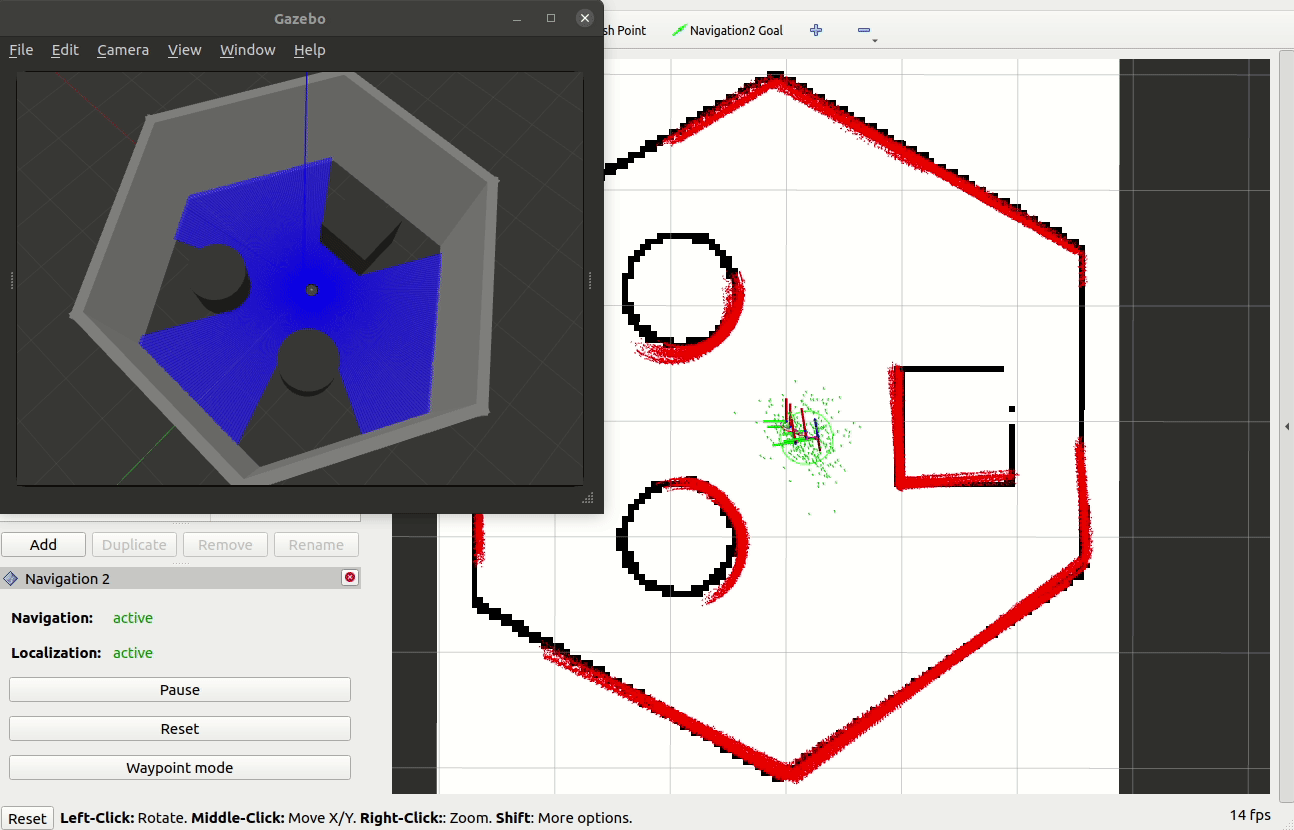
通过RVIZ2的工具栏上的 2D Pose Estimate 可以给迷茫的fishbot指明“机生方向”。

点击 2D Pose Estimate ,进行姿态初始化(选中机器人在Gazebo位置差不多的点,左键点击不要松开,移动鼠标给定方向),初始化完后,左边的Global Status 就正常了。

5.单点导航
点击RVIZ2工具栏上的 就可以给fishbot安排一个目标点了,点击按钮,到地图上任意一点击鼠标左键,注意不要松开,移动鼠标给定一个方向。
6.多点(路点)导航
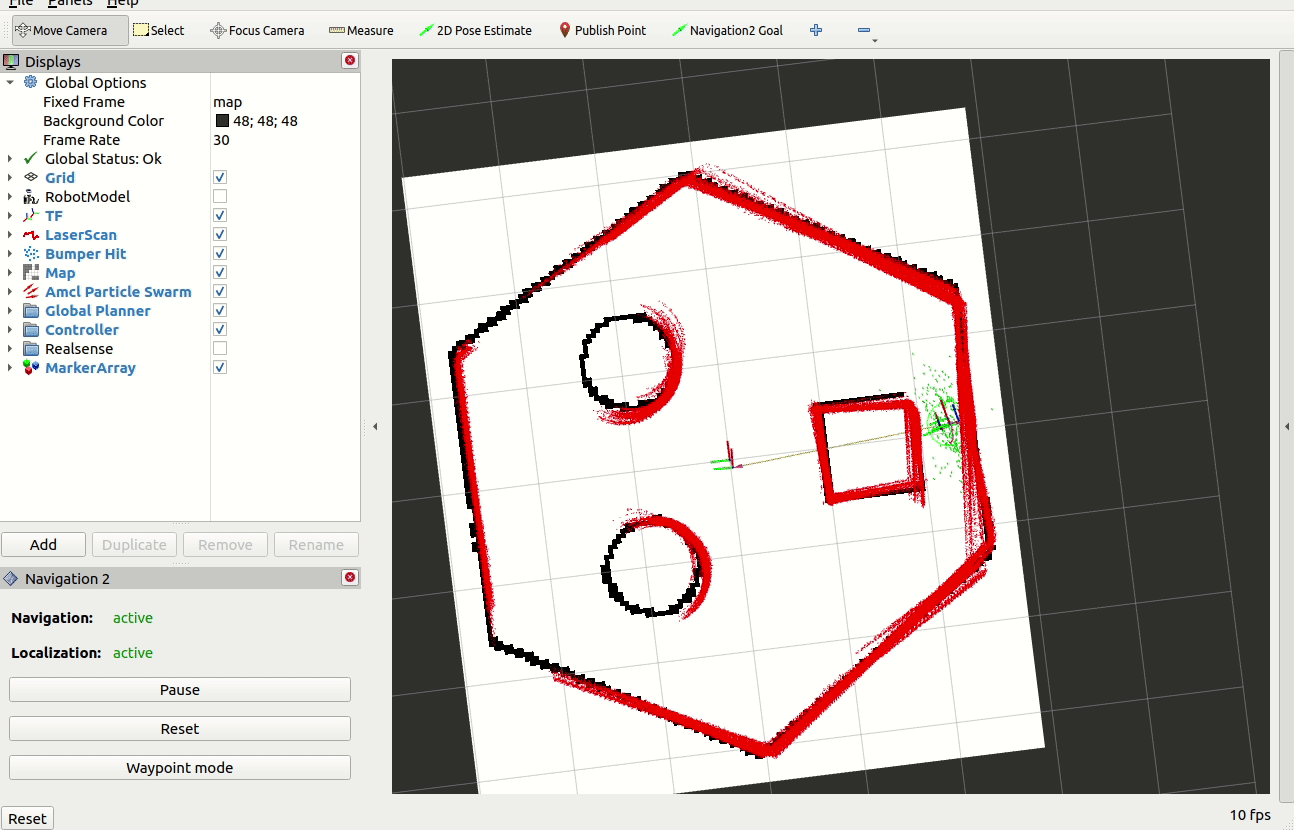
观察左下角,有一个Nav2的Rviz2小插件,可以进行启动停止和导航模式的切换,点击 切换到路点模式。
接着你可以使用工具栏的 按钮,给FishBot指定多个要移动的点,接着点击左下角的启动,就可以看到FishBot依次到达这些目标点。
7.查看机器人当前在地图中的位置
在机器人导航过程中我们如何实时查看机器人在地图中的位置呢?我们可以通过tf进行查看。
打开终端,输入指令:
ros2 run tf2_ros tf2_echo map base_link
接着就可以看到下面的信息,旋转和变换位资数据了:
[INFO] [1653215686.225862749] [tf2_echo]: Waiting for transform map -> base_link: Invalid frame ID "map" passed to canTransform argument target_frame - frame does not exist At time 4873.528000000 - Translation: [-0.009, -0.016, 0.076] - Rotation: in Quaternion [0.000, -0.000, -0.000, 1.000] At time 4874.514000000 - Translation: [-0.009, -0.016, 0.076] - Rotation: in Quaternion [0.000, -0.000, -0.000, 1.000]
本节我们终于将FishBot的自主导航给跑了起来,不过我们都是通过RVIZ2的工具给机器人指定的目标点,除了工具栏的工具,我们还可以使用代码的方式发送目标点给FishBot,下一节小鱼就会带你一起学习Nav2的API(应用程序接口)。
source install/setup.bash
ros2 launch fishbot_description gazebo.launch.py