松灵机器人Scout mini小车仿真指南
之前介绍了如何通过CAN TO USB串口实现用键盘控制小车移动。但是一直用小车测试缺乏安全性。而松灵官方贴心的为我们准备了gazebo仿真环境,提供了完整的仿真支持库,本文将介绍如何上手使用仿真。
官方仓库地址:https://github.com/agilexrobotics/ugv_gazebo_sim
1.仿真环境准备
整个功能包介绍
├── scout_control :该文件夹是小车仿真控制器功能包
├── scout_description :该文件夹是模型文件功能包
└── scout_gazebo_sim :该文件夹是gazebo模拟功能包
安装相关功能包依赖
所采用的开发环境是Ubuntu18.04+ROS Melodic
下载所需要的功能包
sudo apt-get install ros-melodic-ros-control
sudo apt-get install ros-melodic-ros-controllers
sudo apt-get install ros-melodic-gazebo-ros
sudo apt-get install ros-melodic-gazebo-ros-control
sudo apt-get install ros-melodic-joint-state-publisher-gui
sudo apt-get install ros-melodic-teleop-twist-keyboard
新建工作空间并初始化
打开一个新终端,创建一个名为scout_ws的工作区,并初始化:
mkdir -p scout_ws/src
cd scout_ws/src
catkin_init_workspace
下载对应的仿真模型功能包。本文采用的是scout mini。需要将https://github.com/agilexrobotics/ugv_gazebo_sim/tree/master/scout下的三个文件复制到src目录中
git clone https://github.com/agilexrobotics/ugv_gazebo_sim/tree/master/scout
正常编译
cd ..
rosdep install --from-paths src --ignore-src -r -y
caktin_make
2.仿真小车验证
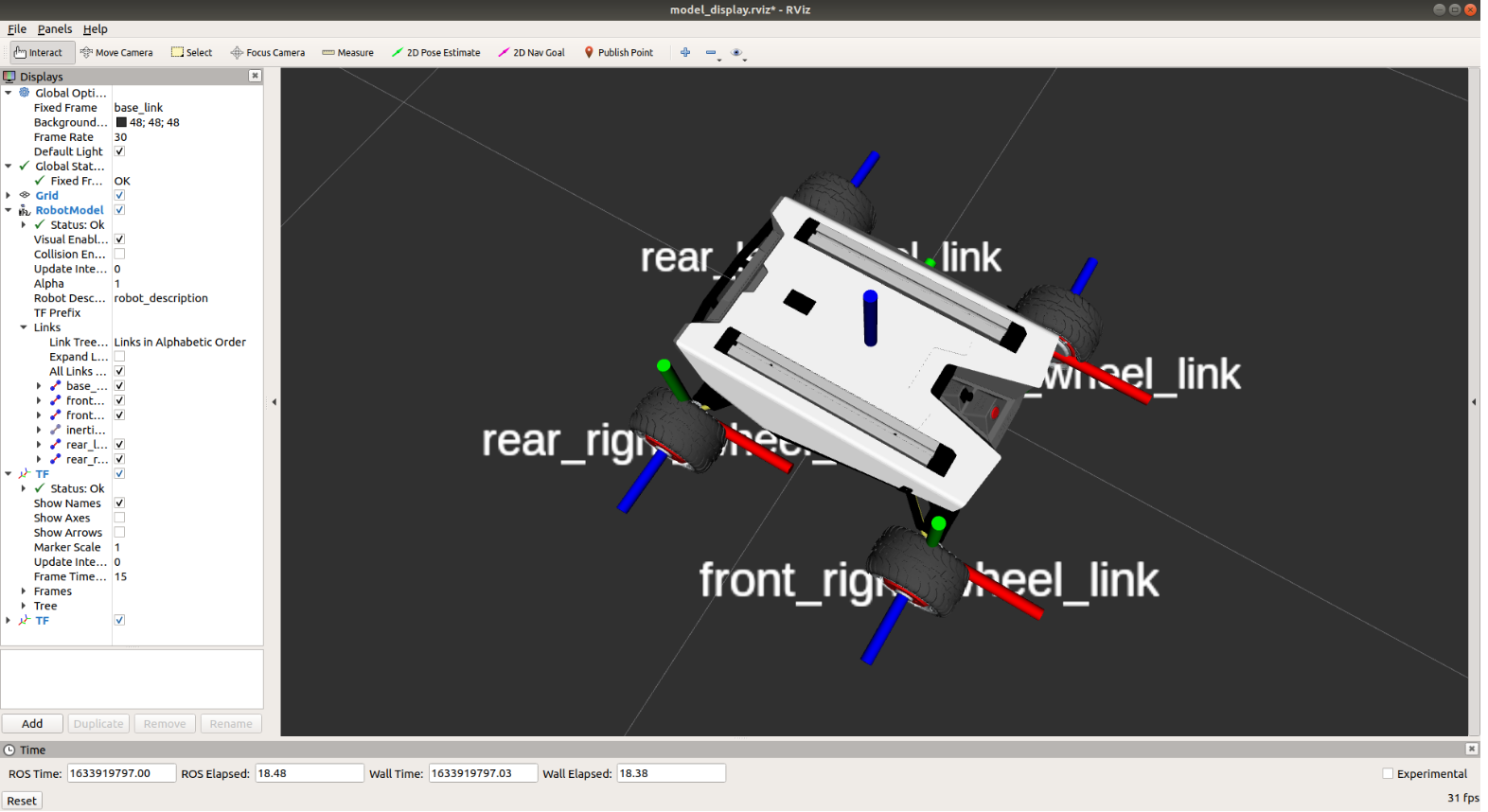
进入scout_ws工作空间,运行系列车仿真模型,display_xxxx.launch 为不同车型在rviz仿真展示。scout_xxxx.launch为不同车型在gazebo模拟环境中展示。
source devel/setup.bash
roslaunch scout_description display_scout_mini.launch
source devel/setup.bash
roslaunch scout_gazebo_sim scout_empty_world.launch
如果想使用playgen地图,需要提取补全gazebo里面的models文件,不然会一直黑屏
3.添加自定义传感器
官方给定的只有小车底座,没有现成的传感器。在实际使用过程中,可以自定义一系列传感器。
scout系列车型的urdf描述文件位于scout_description/urdf中,在使用过程中,并未直接使用urdf进行描述,而是从xacro(xml xacro)描述文件中生成urdf信息。便于我们像编程一样复用urdf节点以及相关拆分组件等功能。
如果不了解xacro 可以参考xacro语法说明: http://wiki.ros.org/xarc
自定义简易摄像头
首先在scout_description/urdf中添加一个名为universal_sensor_adder.xacro的文件,其中保存内容如下:
<?xml version="1.0"?>
<!--
Author: AnthonySuen
Date: 2020-4-8
-->
<robot xmlns:xacro="http://www.ros.org/wiki/xacro" name="universal_sensor_adder"><!-- 用于生成一个新的传感器节点, x_offset y_offset z_offset r p y对应于传感器和 base_link 的相对位置sensor_config 为传感器的配置信息sensor_plugin_config 为 gazebo 相关插件的配置内容 --><xacro:macro name="add_sensor" params="sensor_name type x_offset y_offset z_offset r p y **sensor_config **sensor_plugin_config"><link name="sensor_${sensor_name}"><!-- 配置传感器视觉信息 --><visual><geometry><box size="0.03 0.05 0.05"/></geometry><material name="red"><color rgba="1.0 0.0 0.0 1.0"/></material></visual><!-- 配置碰撞体积, 为gazebo仿真使用 --><collision><origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0"/><geometry><box size="0.03 0.05 0.05"/></geometry></collision><!-- 配置惯性矩阵, 用于 gazebo 仿真,这里我假设传感器很轻很小 --><inertial><origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0"/><mass value="1e-5"/><inertia ixx="1e-6" ixy="1e-6" ixz="1e-6" iyy="1e-6" iyz="1e-6" izz="1e-6"/></inertial></link><!-- 配置关节信息, 这里我默认传感器是固定在车上的 --><joint name="sensor_${sensor_name}_joint" type="fixed"><parent link="base_link"/><child link="sensor_${sensor_name}"/><origin xyz="${x_offset} ${y_offset} ${z_offset}" rpy="${r} ${p} ${y}"/></joint><!-- gazebo 配置仿真配置部分 --><gazebo reference="sensor_${sensor_name}"> <!-- 此部分要与 传感器 link 名称保持一致 --><sensor name="${sensor_name}" type="${type}"><!-- 这里会插入传感器自身配置信息和相关插件的配置内容 --><xacro:insert_block name="sensor_config"/><xacro:insert_block name="sensor_plugin_config"/></sensor></gazebo></xacro:macro>
</robot>在使用过程中删除中文注释,xacro无法解析非ascii 字符!
编辑empty.urdf文件,修改内容如下:
<?xml version="1.0"?>
<!--
Author: AnthonySuen
Date: 2020-4-8
-->
<robot xmlns:xacro="http://www.ros.org/wiki/xacro" name="sensors"><!-- 加载我们之前编写的文件,之后可以使用其中相关内容 --><xacro:include filename="$(find scout_description)/urdf/universal_sensor_adder.xacro" /><!-- 使用我们编写的函数,填入相关参数 --><xacro:add_sensor sensor_name="camera" type="camera" x_offset="0.1" y_offset="0.0" z_offset="0.085" r="0.0" p="0.0" y="0.0"><!-- 这部分会替换 <xacro:insert_block name="sensor_config"/> 中的内容 --><sensor_config><update_rate>30</update_rate><camera name="general_camera"><image width="640" height="480" hfov="1.5708" format="RGB8" near="0.01" far="50.0"/></camera></sensor_config><!-- 这部分会替换 <xacro:insert_block name="sensor_plugin_config"/> 中的内容 --><sensor_plugin_config><plugin name="general_camera_controller" filename="libgazebo_ros_camera.so"><alwaysOn>true</alwaysOn><updateRate>36.0</updateRate><cameraName>sensor_camera</cameraName><imageTopicName>image_raw</imageTopicName><cameraInfoTopicName>camera_info</cameraInfoTopicName><frameName>sensor_camera</frameName> <!-- 需要与 传感器 link 名称保持一致 --><hackBaseline>0.1</hackBaseline><distortionK1>0.0</distortionK1><distortionK2>0.0</distortionK2><distortionK3>0.0</distortionK3><distortionT1>0.0</distortionT1><distortionT2>0.0</distortionT2></plugin></sensor_plugin_config></xacro:add_sensor>
</robot>
在使用过程中删除中文注释,xacro无法解析非ascii 字符!
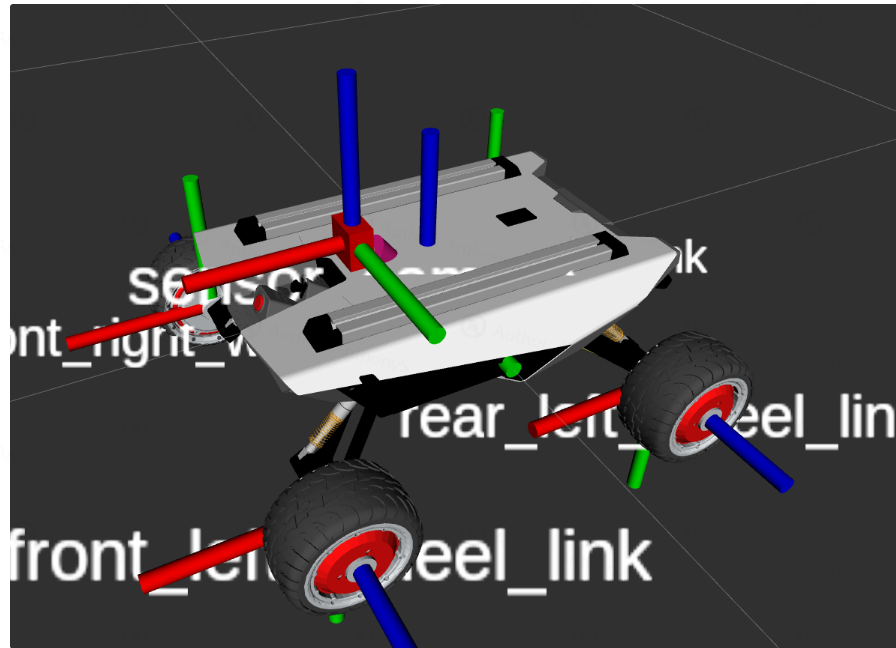
之后再运行RIVZ查看修改后的模型
roslaunch scout_description display_mini_models.launch



![[转]ZeroMQ用法说明及C++示例](https://img2024.cnblogs.com/blog/732505/202407/732505-20240709143806017-1926446521.png)