使用 FCI 时,您会遇到多种错误,这些错误可能是由于用户发送的不合规命令、通信问题或机器人行为而导致的。以下小节详细介绍了最相关的错误。有关完整列表,请查看 API文档。
请注意,发生错误后,您可以自动清除错误并继续使用该franka::Robot::automaticErrorRecovery()命令运行程序,无需用户干预。继续之前请检查异常字符串,以确保错误不是严重错误。某些错误也可以通过切换外部激活设备或使用 Desk 中的错误恢复按钮手动清除。
由于不符合指令值而导致的错误
如果用户发送的命令值不符合接口要求,则会出现下列错误之一:
-
由于运动发生器的初始值错误而导致的错误:
-
-
joint_motion_generator_start_pose_invalid -
cartesian_position_motion_generator_start_pose_invalid -
cartesian_motion_generator_start_elbow_invalid -
cartesian_motion_generator_elbow_sign_inconsistent
-
这些错误表明当前机器人值与用户发送的初始值之间存在差异。要修复这些错误,请确保控制回路从机器人状态下观察到的最后一个命令值开始。例如,对于关节位置接口:
double time{0.0}; robot.control([=, &time](const franka::RobotState& robot_state, franka::Duration period) -> franka::JointPositions {time += period.toSec();if (time == 0) {// Send the last commanded q_c as the initial valuereturn franka::JointPositions(robot_state.q_c);} else {// The rest of your control loop ...}});
由于使用关节位置/速度运动生成器时违反位置限制:
joint_motion_generator_position_limits_violation而产生的错误,将产生。解决此错误应该很简单:确保您发送的值在 限制范围内。笛卡尔接口对逆运动学后产生的关节信号也有限制:
cartesian_motion_generator_joint_position_limits_violation如果控制的逆运动学求解器产生超出限制的关节配置,则会触发 。
由于速度限制违规和不连续性错误而导致的错误,指的是 加速度和/或加速度限制违规。如果您使用关节运动发生器,可能的错误是:
-
joint_motion_generator_velocity_limits_violation -
joint_motion_generator_velocity_discontinuity(违反加速度限制) -
joint_motion_generator_acceleration_discontinuity(违反冲击极限)
笛卡尔极限:
cartesian_motion_generator_velocity_limits_violation
cartesian_motion_generator_velocity_discontinuity(违反加速度限制)
cartesian_motion_generator_acceleration_discontinuity(违反冲击极限)逆运动学后的关节限制
cartesian_motion_generator_joint_velocity_limits_violation
cartesian_motion_generator_joint_velocity_discontinuity(违反加速度限制)
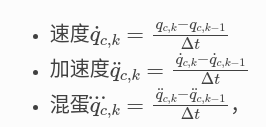
cartesian_motion_generator_joint_acceleration_discontinuity(违反冲击极限)为了减轻速度违规或不连续性错误,请确保您命令的信号不违反限制。对于每个运动发生器,控制使用向后欧拉来区分用户发送的信号。例如,如果使用关节位置运动发生器,在时间𝑘<span><span>用户发送命令𝑞𝑐,𝑘<span><span>,由此产生的速度、加速度和加速度将是:
注意𝑞𝑐,𝑘−1,𝑞˙𝑐,𝑘−1<span><span>和 𝑞¨𝑐,𝑘−1<span><span>总是以机器人状态返回给用户𝑞𝑑,𝑞˙𝑑<span><span>和 𝑞¨𝑑<span><span>这样,即使在数据包丢失的情况下,您也可以提前计算出结果导数。
最后,对于扭矩接口,扭矩率限制违规会触发错误:
controller_torque_discontinuity控制系统还利用反向欧拉法计算扭矩率,即
。用户先前命令的期望扭矩也会在机器人状态中发送回𝜏𝑑, 因此即使在数据包丢失的情况下,您也可以提前计算最终的扭矩率。
<code class="docutils literal notranslate"><span class="pre">libfranka自版本以来,速率限制器
0.4.0会修改用户发送的信号,使其符合所有这些限制(逆运动学之后的关节限制除外)。您可以查看include/franka/rate_limiting.h和src/rate_limiting.cpp获取有关如何计算所有接口的结果速度、加速度和加速度的示例代码。我们再次强调,对不连续信号使用速率限制很容易导致不稳定的行为,因此请确保您的信号足够平滑,然后再启用此稳健性功能。
由于沟通问题导致的错误
如果在实时循环期间,控制在 20 个周期(即 20 毫秒)内未收到任何数据包,您将收到错误communication_constraints_violation。请注意,如果您的连接出现间歇性丢包,它可能不会停止,但即使您的源信号符合接口规范,它也可能触发不连续错误。在这种情况下,请查看我们的故障排除部分 ,并考虑启用信号处理功能 以提高控制循环的稳健性。
机器人行为错误
这些监控功能并不符合任何安全规范,也不能保证用户的安全。它们仅用于帮助研究人员开发和测试他们的控制算法。
反射误差: 如果估计的外部扭矩𝜏^𝑒𝑥𝑡<span><span>或力量 𝑂𝐹^𝑒𝑥𝑡<span><span>超过配置的阈值,将分别触发cartesian_reflex或 joint_reflex错误。您可以使用 non realtime 命令配置阈值franka::Robot::setCollisionBehavior。
<span class="math notranslate nohighlight"><span><span><span><span>如果您希望机器人与环境接触,则必须将碰撞阈值设置为更高的值。否则,一旦您抓住物体或推向表面,就会触发反射。此外,如果阈值较低,没有接触的非常快速或突然的运动可能会触发反射;外部扭矩和力只是估计值,根据机器人配置,这些值可能不准确,尤其是在高加速阶段。您可以通过观察来监控它们的值𝜏^𝑒𝑥𝑡<span><span>和𝑂𝐹^𝑒𝑥𝑡<span><span> 处于机器人状态。
<span class="math notranslate nohighlight"><span><span><span class="math notranslate nohighlight"><span class="math notranslate nohighlight"><span><span><strong>自防碰撞</strong><span><span>。如果机器人达到接近自碰撞的配置,则会触发错误 <span style="color: #ff0000;"><strong>self_collision_avoidance_violation</strong>
<span class="math notranslate nohighlight"><span><span><span class="math notranslate nohighlight"><span class="math notranslate nohighlight"><span><span><span><span><span style="color: #ff0000;"><strong>此错误不能保证机器人在任何配置和速度下都能防止自碰撞。如果使用扭矩接口,以全速驱动机器人,机器人可能会自碰撞。</strong>
-
如果达到扭矩传感器的极限
tau_j_range_violation, 将触发。这并不能保证传感器在任何高扭矩相互作用或运动后不会损坏,但旨在防止部分损坏。 -
如果达到允许的最大功率
power_limit_violation,将触发。它将阻止机器人移动并继续控制循环。如果达到关节或笛卡尔极限,您将分别得到joint_velocity_violation或一个cartesian_velocity_violation错误。 -
如果达到关节或笛卡尔极限,您将分别得到
joint_velocity_violation或一个cartesian_velocity_violation错误。