松灵机器人Scout mini小车建图导航仿真
在之前的文章中,我们已经介绍了如何在gazebo和rviz对scout mini小车进行仿真,并且测试了添加自定义的传感器,在本文章中将进一步介绍如何利用scout mini小车 在仿真环境中建图和导航。
仓库链接: https://gitee.com/agent-explorer/robotics/tree/master/scout_mini_navigation
1.仿真环境准备
直接复制仓库链接:https://gitee.com/agent-explorer/robotics/tree/master/scout_mini_navigation 。
进入到scout_mini_navigation中,配置好ROS环境后直接运行setup.bash脚本,自动安装相关环境。
sudo bash setup.bash
catkin_make
source devel.setup.bash
这里需要注意:在setup.bash过程中可能出现gazebo有关包错误,可以自行官网下载
2. 仿真建图
2.1 运行gmapping
在确保安装好gazebo模型之后(后续地图会用到gazebo模型,需要提前下载),直接使用gmapping建图。
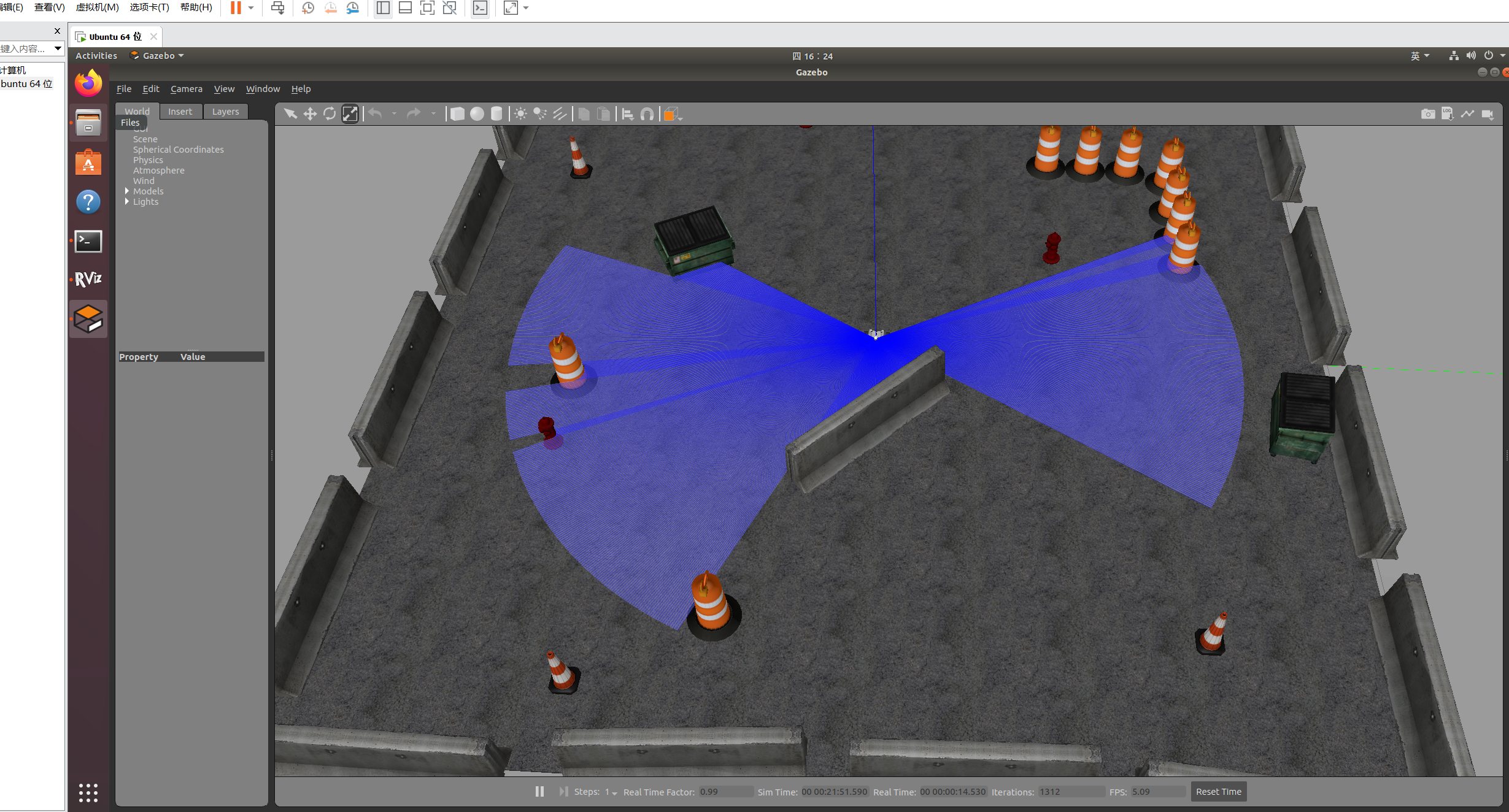
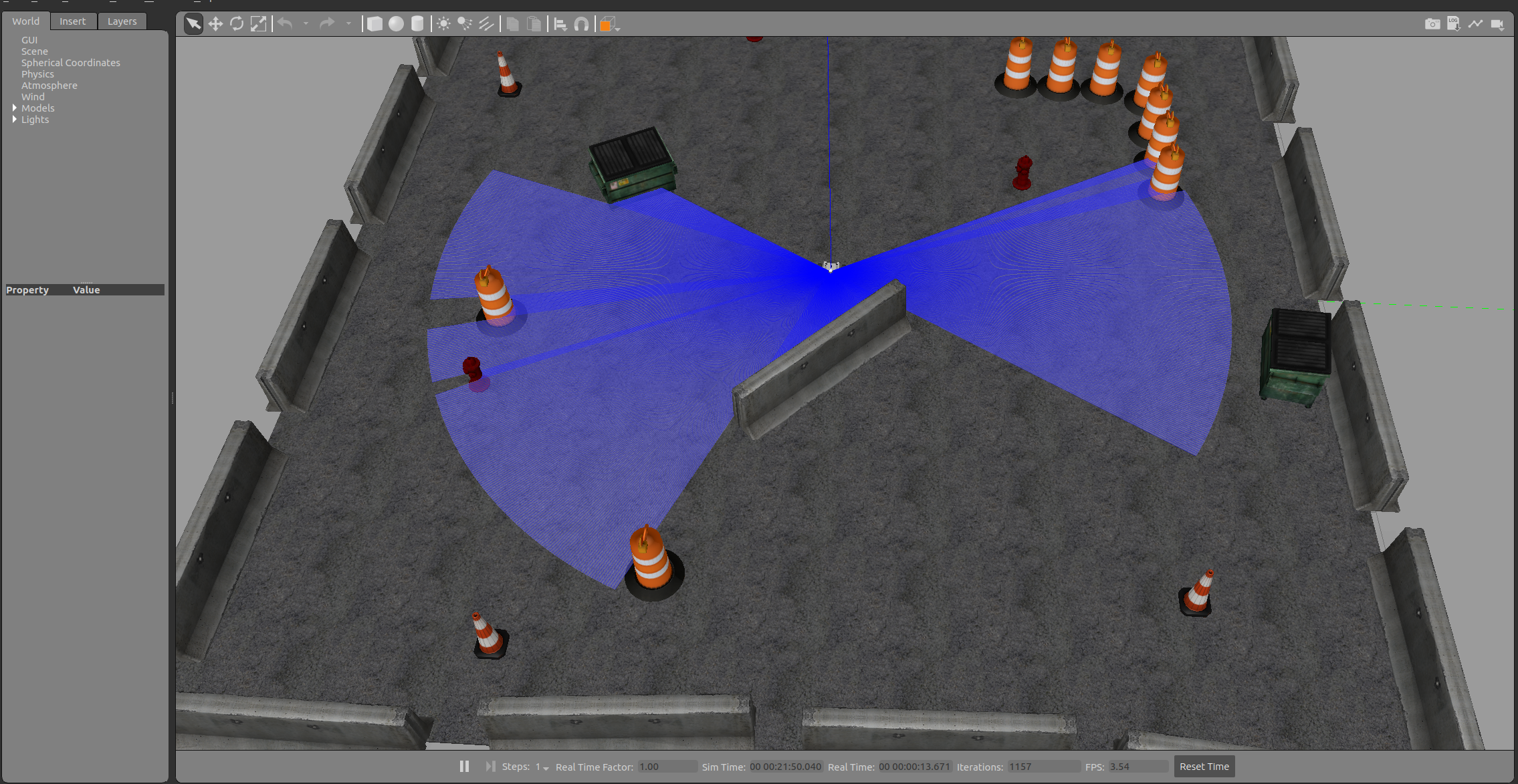
roslaunch scout_gazebo_sim scout_mini_gmapping.launch
打开以下窗口则证明gmapping正常工作。
2.2 环境探索建图
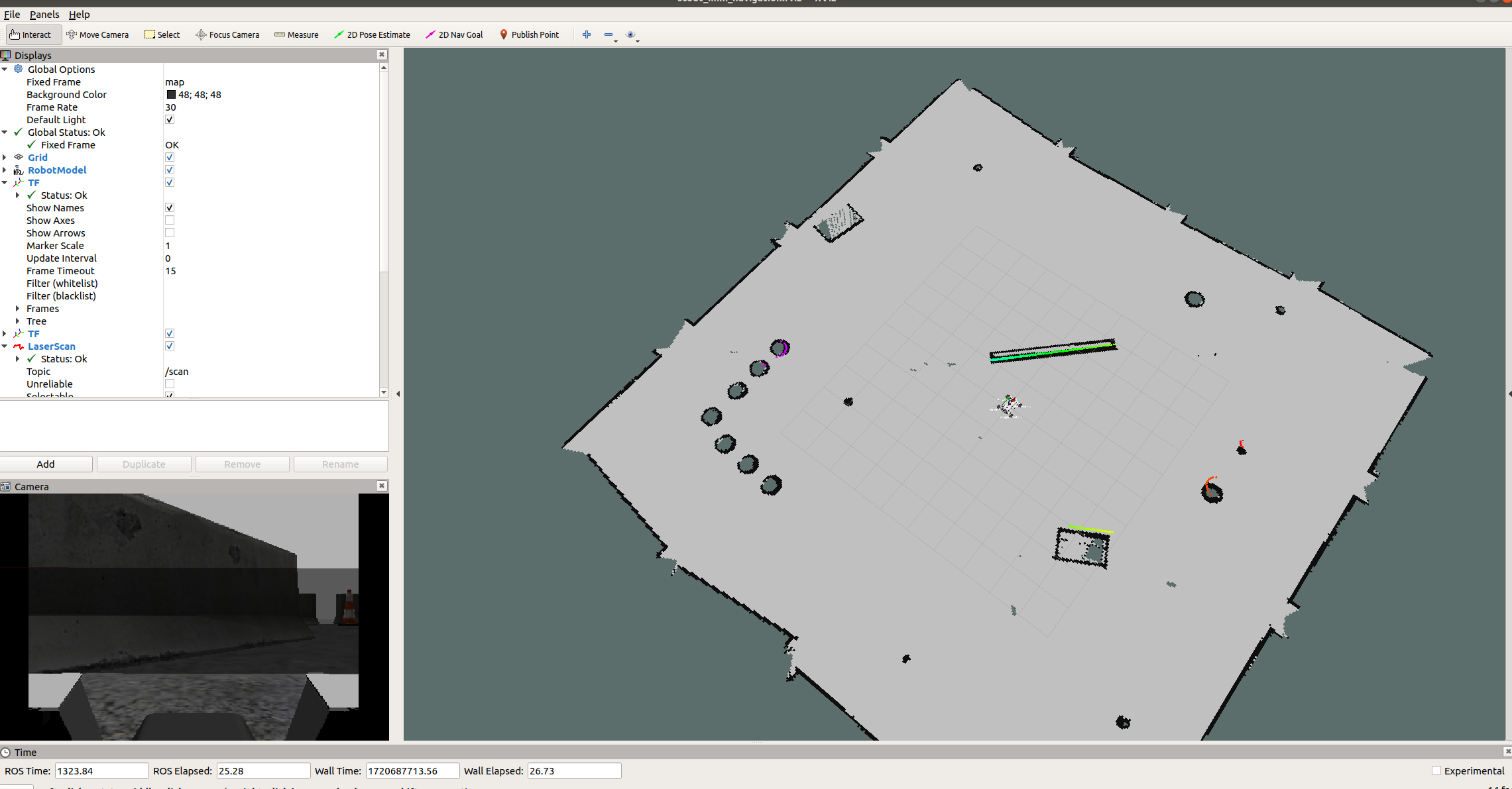
之后打开一个新的终端,运行键盘控制节点,控制小车探索环境:
rosrun tele_twist_keyboard teleop_twist_keyboard.py
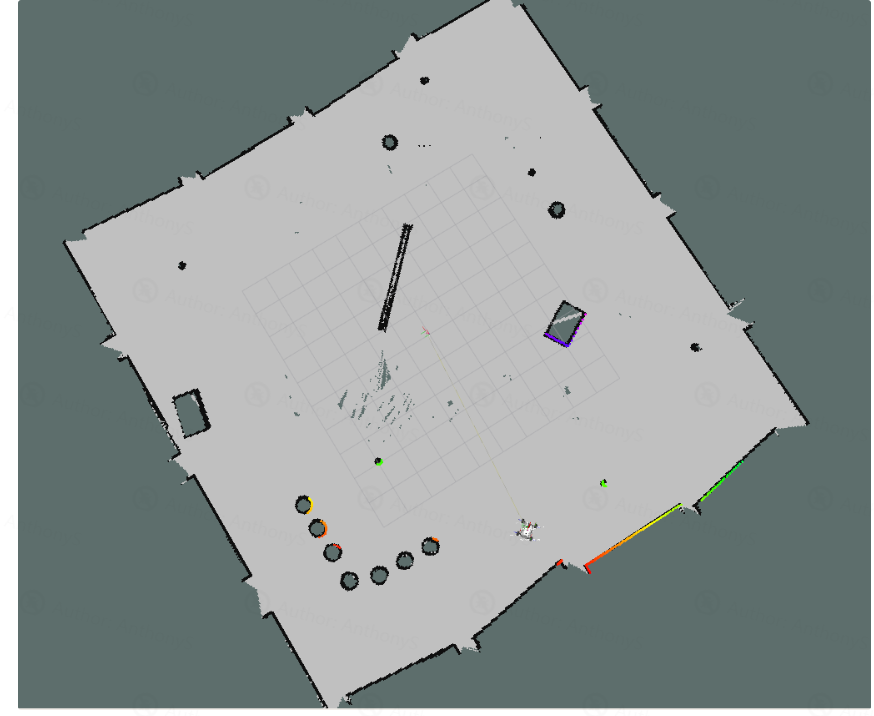
控制车辆在地图中行走,直到将整幅地图构建完毕
2.3 地图保存
运行下面命令保存构建好的地图
cd src/scout_gazebo_sim/maps/
rosrun map_server map_saver -f testmap
即可在工作空间看到保存的地图:
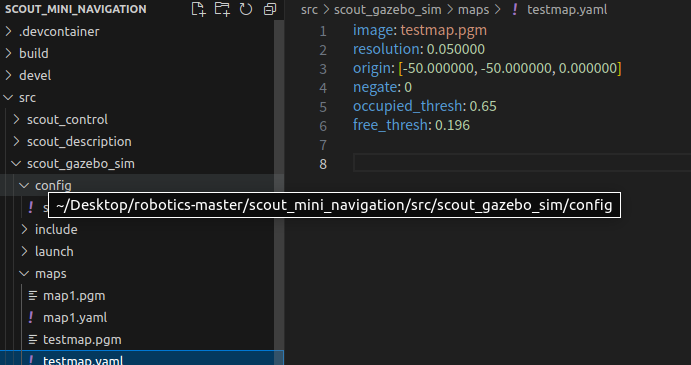
这里需要注意
testmap.yaml中image属性是相对路径,如果是绝对路径则会出现问题
2.4 自主导航
启动导航launch
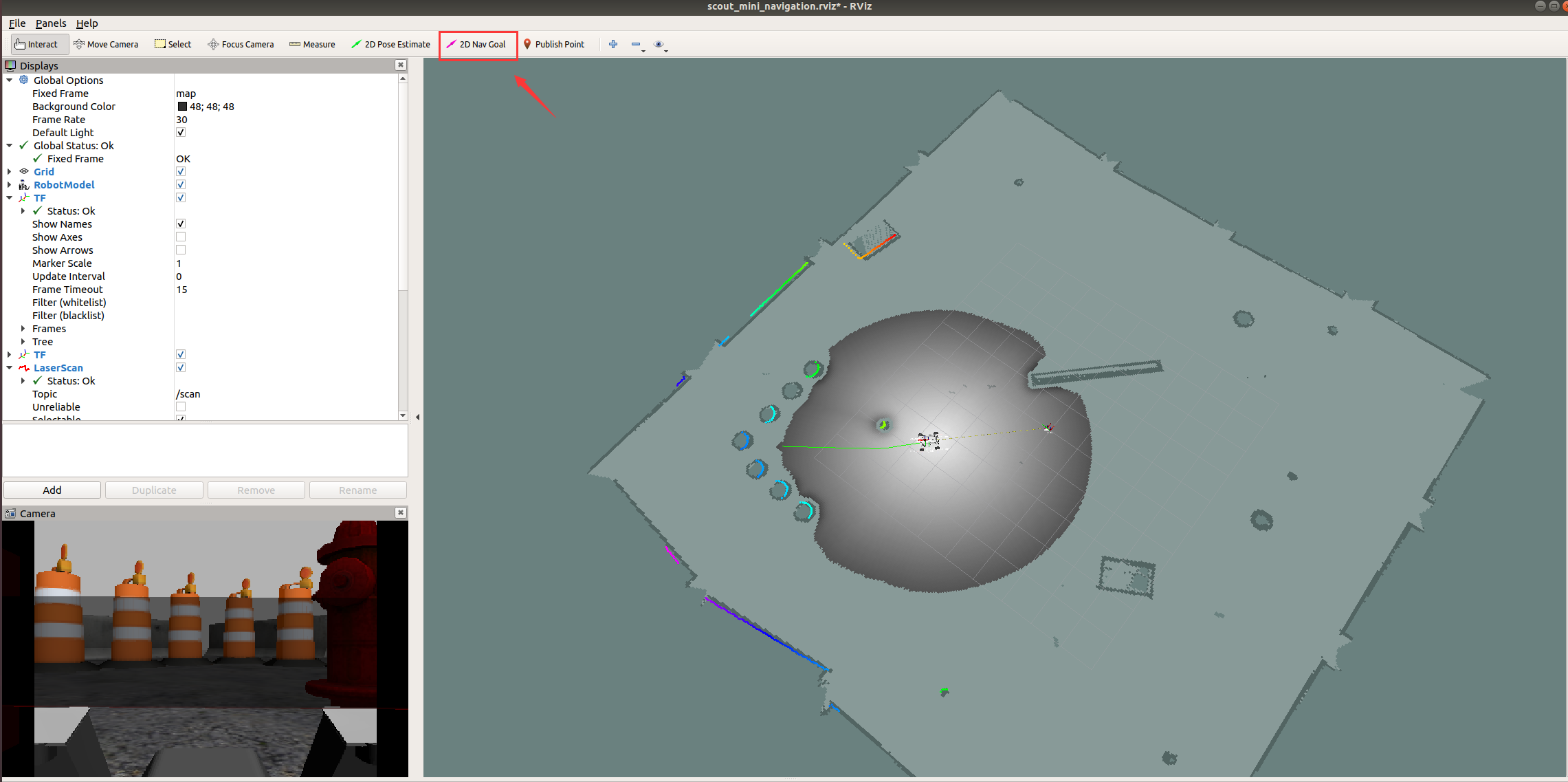
roslaunch scout_gazebo_sim scout_mini_navigation.launch
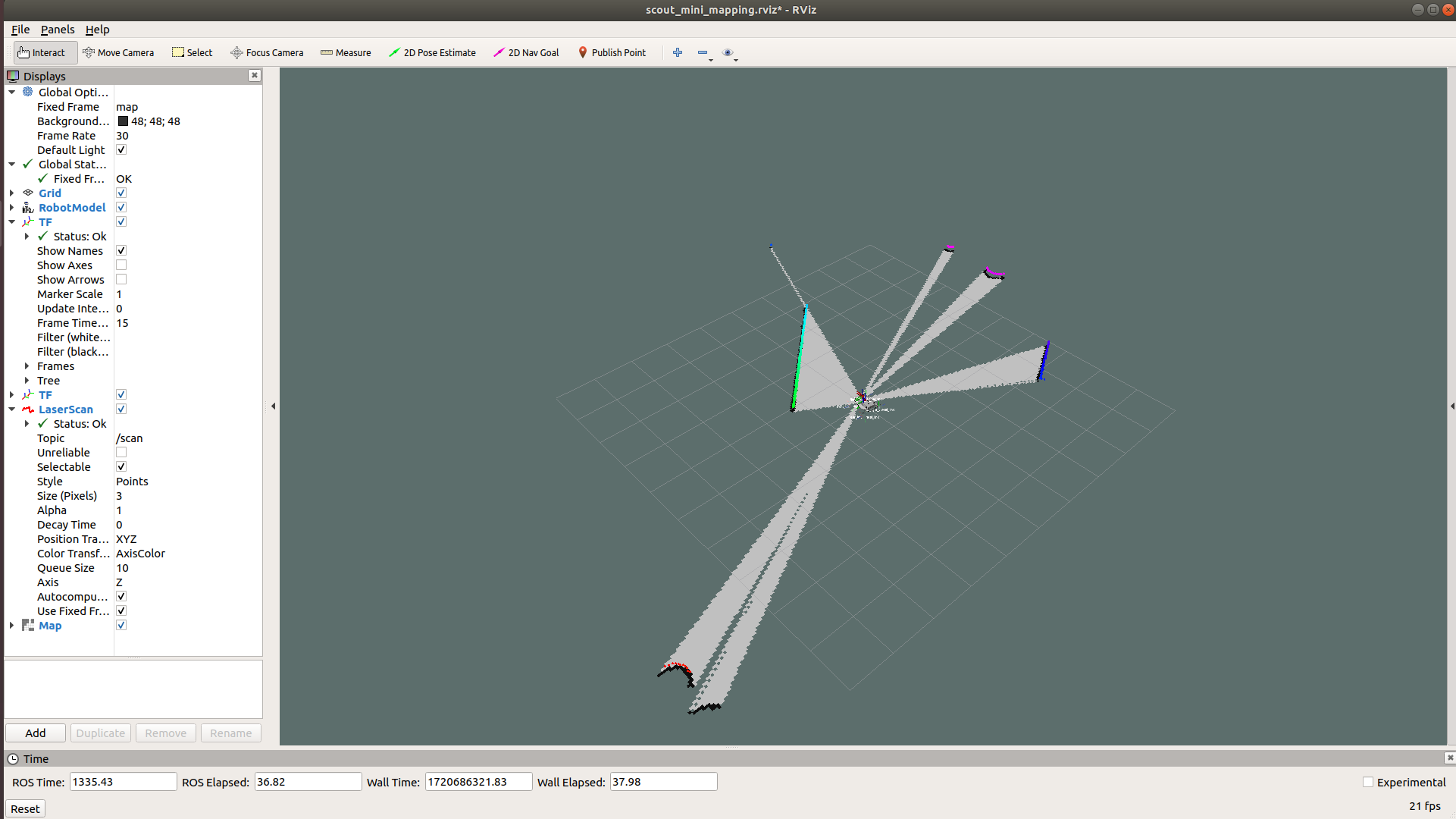
看到如下界面代表成功启动:
点击2D Nav Goal 选择目标点,小车可以完成自主导航。
3.传感器配置
在之前的文章中介绍了如何自定义添加相机传感器,本章将进一步介绍如何添加激光雷达和imu两个传感器,相关配置均在 scout_description/urdf/empty.urdf中。
3.1 添加激光雷达
Gazebo提供了ray标签用于自定义激光雷达,ray包含了scan和range两个属性。scan描述激光雷达水平和垂直方向上的采样线数,range定义每束激光的属性。
Code
<ray><scan><horizontal><!--- 水平方向上生成 720 条采样线 ---><samples>720</samples><!--- 返回的范围数据点的个数 = 分辨率 * 样本数 ---><resolution>1</resolution><!--- 最大和最小角度,弧度制。决定激光雷达扇形的范围 ---><min_angle>-2.09439504</min_angle><max_angle>2.09439504</max_angle></horizontal></scan><range><!--- 每个采样线的 最小距离 和 最大距离 以及 分辨率 ---><min>0.05</min><max>8.0</max><resolution>0.01</resolution></range><noise><!--- 添加高斯噪声 ---><type>gaussian</type><mean>0.0</mean><stddev>0.01</stddev></noise>
</ray>
ray标签支持的所有属性可以在 http://sdformat.org/spec?ver=1.6&elem=sensor#sensor_ray 找到
之后我们还需要添加 Gazebo 雷达插件广播我们雷达的信息:
Code
<plugin name="sensor_ray_controller" filename="libgazebo_ros_laser.so"><topicName>/scan</topicName> <!--- 雷达信息广播话题名 ---><frameName>sensor_ray</frameName> <!--- 和雷达 link 名称一致 --->
</plugin>
可用插件可以在 https://classic.gazebosim.org/tutorials
tut=ros_gzplugins#Tutorial:UsingGazebopluginswithROS 找到
3.2添加IMU
方法和激光雷达类似,标签属性 http://sdformat.org/spec?ver=1.6&elem=sensor#sensor_imu 。
插件信息 https://classic.gazebosim.org/tutorials?tut=ros_gzplugins#IMUsensor(GazeboRosImuSensor) 。
3.3 Odom发布
在仿真中,我们使用libgazebo_ros_p3d.so插件广播odom。这个插件用于在仿真中获取任意 link 的位姿真值,并通过 odom 格式的消息进行广播。
其具体配置笔者加加在了src/scout_description/urdf/scout_mini.gazebo 中的第 30~39 行:
Code
<plugin name="p3d_base_controller" filename="libgazebo_ros_p3d.so"><alwaysOn>true</alwaysOn><updateRate>50.0</updateRate><bodyName>base_link</bodyName> <!--- 广播 base_link 的位姿真值---><topicName>odom</topicName> <!--- topic 名称,这里作为 odom 进行广播 ---><gaussianNoise>0.01</gaussianNoise><frameName>world</frameName> <!--- 参考坐标系,根据 odom 定义,这里选择世界原点 ---><xyzOffsets>0 0 0</xyzOffsets><rpyOffsets>0 0 0</rpyOffsets>
</plugin>
4. ROS相关配置
在小车自主建图过程中,最重要的几个ROS包以及功能对应如下:
├── move_base :导航包,根据参照的消息进行路径规划;
├── gmapping :根据激光数据建立地图;
├── amcl : 用于在已知地图中定位;
└── mapserver :用于保存地图为YAML格式
此外还有:
|——robot_pose_ekf :是 ROS 中实现多传感器融合输出机器人位姿的程序包。
4.1 robot_pose_ekf
robot_pose_ekf 是 ROS 中实现多传感器融合输出机器人位姿的程序包。其基本原理是利用扩展卡尔曼滤波,利用多种传感器实现机器人位姿的最优估计。官方百科:http://wiki.ros.org/robot_pose_ekf
在本例中其配置如下:
Code
<node pkg="robot_pose_ekf" name="robot_pose_ekf" type="robot_pose_ekf"><param name="output_frame" value="odom" /> <!--- 发布 tf 名为 odom ---><param name="base_footprint_frame" value="base_link"/> <!--- 建立 output_frame->base_link 的 tf 变换---><param name="freq" value="50.0"/><param name="sensor_timeout" value="1.0"/><param name="odom_used" value="true"/> <!--- 使用原始 odom 信息---><param name="odom_data" value="odom"/><param name="vo_used" value="false"/> <!--- 不使用视觉里程计 --->
</node>
4.2 gmapping
在建图环节,我们使用的是gmapping,它可以只用 激光雷达和 里程计 信息进行建图,其启动文件位于 src/scout_gazebo_sim/launch/scout_mini_gmapping.launch 对于本例中使用 2D 激光雷达 在 小型场景 中建图,gmapping 可以达到相当不错的效果。官方文档:http://wiki.ros.org/gmapping
gmapping 本身需要订阅 tf 和 scan 两个话题以获取 tf 变换数据 和 激光雷达数据。
其次,gmapping 需要 激光雷达坐标 到 base_link 的 tf 变换(本例中由 robot_state_publisher 包自动发布):

以及 odom 和 base_link 之间的变换(由 robot_pose_ekf 发布融合数据):
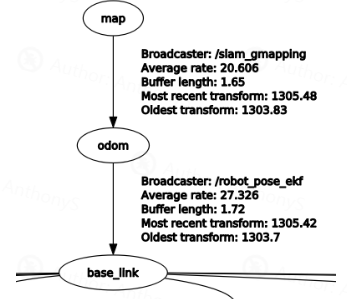
在正确配置 tf 树以及 topic 后即可让我们的车辆开始运动,gmapping 会实时更新地图数据。
4.3 map_server
官方文档地址:http://wiki.ros.org/map_server
用于提供map_server 和 map_saver 功能。其中 map_saver 是一个命令行工具,用于保存地图数据为 YAML 格式的文件:
YAML
image: map1.pgm # 地图对应图片的路径名;可以是绝对路径,也可以相对于 YAML 文件位置的相对路径. 用不同的像素颜色描述世界中每个cell的占用状态。白色像素表示free,黑色像素表示occupied, 其它颜色像素表示unknown
resolution: 0.050000 # 分辨率 米/像素
origin: [-50.000000, -50.000000, 0.000000] # 地图左下像素的2-D姿势(x,y,yaw),yaw 为逆时针旋转角度(YAW = 0表示无旋转)。系统的许多部分目前忽略了 yaw
negate: 0 # 是否翻转黑白像素代表的含义
occupied_thresh: 0.65 # 占用概率大于此阈值的像素被认为是完全占用的
free_thresh: 0.196 # 用概率小于此阈值的像素被认为是自由的
当作为 map_server 使用时创建一个 map_server 节点,利用从磁盘读取的地图数据提供 ROS 服务。map_server 的当前实现将 MAP 图像数据中的颜色值转换为三元占用值:Free(0),占用(100)和未知(-1)。
一个简单的 launch 例子如下:
<node pkg="map_server" type="map_server" name="map_server" args="$(find scout_gazebo_sim)/maps/$(arg map_name).yaml" output="screen"><param name="frame_id" value="map"/>
</node>
4.4 amcl
amcl 是一个用于 2D 移动机器人的定位系统,其实现了自适应(或 KLD 采样)蒙特卡洛定位方法,该方法使用粒子群算法来跟踪机器人在已知地图上的位姿,仅使用已知地图和激光雷达信息即可运行。官方文档:http://wiki.ros.org/amcl
其配置信息位于 src/scout_gazebo_sim/param/amcl_params_diff.yaml 一般情况下保持默认即可。
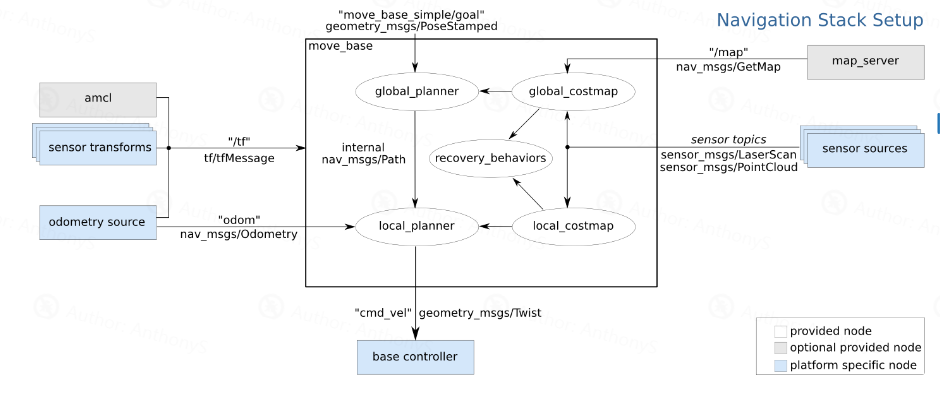
4.5 move_base
官方文档地址:http://wiki.ros.org/move_bas
move_base 就是我们导航系统的核心组件了,给定一个地图上的目标,它会尝试计算全局路径和局部路径用于导航。使用两个规划器(全局和局部)的意义在于,全局路径可以很理想,但是在移动过程中难免会存在遇到障碍物等问题,这时候就需要局部规划指导机器人移动。其接口信息如图所示(来源:http://wiki.ros.org/move_base)
其配置信息如下:
Code
<node pkg="move_base" type="move_base" respawn="false" name="move_base" output="screen"><rosparam file="$(find scout_gazebo_sim)/param/costmap_common_params.yaml" command="load" ns="global_costmap" /><rosparam file="$(find scout_gazebo_sim)/param/costmap_common_params.yaml" command="load" ns="local_costmap" /><rosparam file="$(find scout_gazebo_sim)/param/local_costmap_params.yaml" command="load" /><rosparam file="$(find scout_gazebo_sim)/param/global_costmap_params.yaml" command="load" /><rosparam file="$(find scout_gazebo_sim)/param/planner.yaml" command="load" /><param name="base_global_planner" value="global_planner/GlobalPlanner" /><param name="planner_frequency" value="1.0" /><param name="planner_patience" value="5.0" /><param name="base_local_planner" value="base_local_planner/TrajectoryPlannerROS" /><param name="controller_frequency" value="5.0" /><param name="controller_patience" value="15.0" /><param name="clearing_rotation_allowed" value="true" />
</node>
相关的参数内容较多,除 tf 广播信息 和 节点名称 外大部分参数保持默认信息即可,如有需要可对照官方文档进行修改
5.结语
对于scout_mini 仿真导航的相关介绍到这里就结束了,作为初学者或者使用者,大部分时候我们并不关心软件包或者插件背后的算法实现。笔者同样建议在深入学习其背后原理之前先对其效果有直观感受,在会用的基础上进行深入,如此才能更快理解算法为什么要这样设计以及如何编写属于自己的程序。
参考链接:https://anthonysun256.github.io/scout_mini_navi/